- Микропроцессор. Устройство и принцип действия ЭВМ. (Лекция 2)

Содержание
- 2. Микропроцессор. Структурная схема микроЭВМ. Система команд микроЭВМ. Организация памяти МП-системы.
- 3. С развитием технологии и схемотехники цифровых интегральных схем появилась возможность создавать сложные устройства обработки цифровой информации
- 4. Рис. 1. Схемы, поясняющие принцип построения микропроцессорных систем. Запоминающее устройство, которое на рис. 1а было показано
- 5. Для того чтобы согласовать устройства ввода-вывода информации с магистралью, служат адаптеры ввода-вывода (АВВ) рис. 1б. Магистраль
- 6. Микропроцессорные наборы, совместимые по принятым системам команд, уровням сигна-лов, принципам передачи сигналов по магистралям, носят название
- 7. Наибольшей популярностью пользуется МП серии К580 ‑ аналог 8080. В значительной степени это, вероятно, объясняется его
- 8. В конце 1973 года фирма Intel выпустила микро-процессор 8080, который синхронизировался тактовой частотой 2 МГц. Он
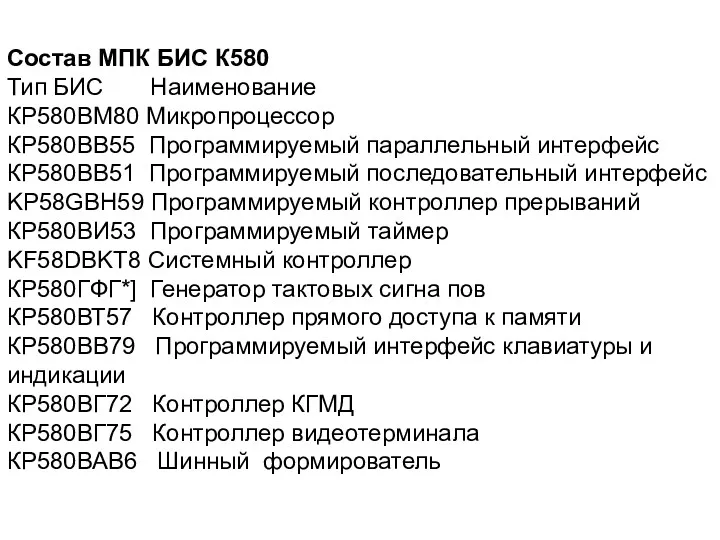
- 9. Состав МПК БИС К580 Тип БИС Наименование КР580ВМ80 Микропроцессор КР580ВВ55 Программируемый параллельный интерфейс КР580ВВ51 Программируемый последовательный
- 10. Отдельные задачи измерительной тех-ники могут эффективно решать однокристальные 8-разрядные микро-ЭВМ серии К1816 (аналог MDS-48) и од-нокристальная
- 11. В 1981 г. фирма IBM выпустила на базе микро-процессора 8088 первую модель нового персо-нального компьютера РС
- 12. Модель РС использовала до двух внешних накопителей на гибких магнитных дисках емкостью 360 Кб и 83-клавишную
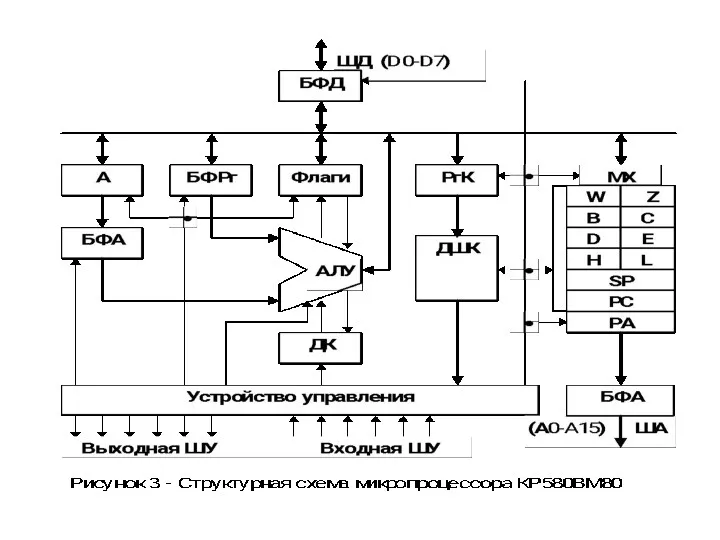
- 13. Упрощенная структурная схема, этого МП КР580ВМ80 построенная на его основе МП-системы показана на рис. 2. В
- 14. Рис. 2. Структурная схема микропроцессорной системы на основе МП КР580ВМ80 [1]. Конструктивно шины выполняются в виде
- 15. Шина данных в МП-системе ‑ двунаправлен-ная. Информация по ней может передаваться как в ЦПУ, так и
- 16. Поэтому часть сигналов управления передается по выводам шины данных в режиме разделения времени. Этим объясняется соединение
- 17. Разрядностью шины адреса (ША) определяется предельно возможный объем памяти, которой может быть укомплектована МП-система. Чем больше
- 18. Внутренняя функциональная схема МП 8080 на рис. 2 показана предельно схематично. Обозначены в основном лишь те
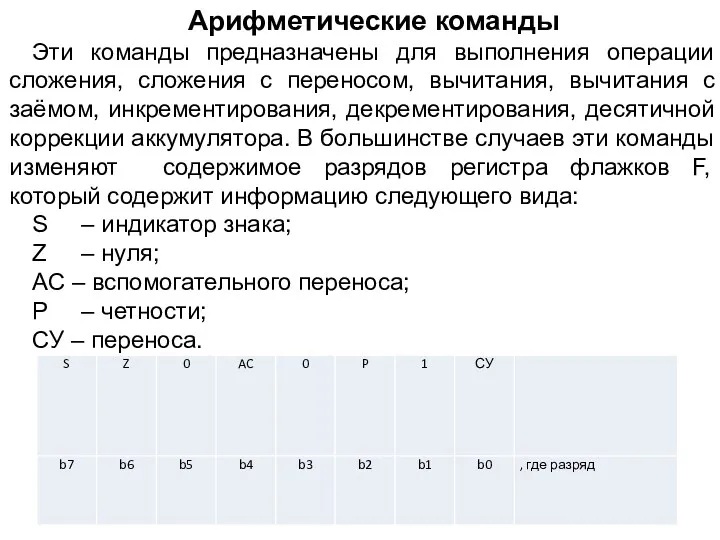
- 19. Непосредственно к АЛУ примыкает регистр флажков (RG F), в котором хранится информация (5 разрядов) о признаках,
- 20. Бит переноса устанавливается равным 1 при переносе из старшего разряда (переполнение разрядной сетки). Дополнительный перенос ‑
- 21. Не все операции, выполняемые в АЛУ, воздействуют на содержание регистра флажков. Этот факт следует учитывать при
- 22. Шестнадцатиразрядный регистр SP (stack pointer) ‑это указатель стека, т.е. регистр, информация в котором указывает адрес очередной
- 23. Соответственно при помещении в стек очередного слова содержимое регистра SP автоматически уменьшается на 2. Затем при
- 24. Показанный на схеме рис. 2 16-разрядный регистр PC (programm counter) ‑ это программный счетчик. Слово, записанное
- 25. Устройство управления УУ, входящее в состав МП (рис. 2), обеспечивает правильное функ-ционирование всех внутренних узлов ЦПУ,
- 27. Буферные регистры W,Z не являются программно доступными регистрами и используются для выполнения команд внутри МП БИС.
- 28. Выполнение каждой команды производится в МП БИС в строго определенной последовательности, определяемой кодом команды, и синхронизируется
- 29. При анализе процессов будем использовать следующие понятия: Машинный цикл (М)-время , требуемое для извлечения из памяти
- 30. 1. Извлечение кода команды (М1). 2. Чтение данных из памяти. 3. Запись данных в память. 4.
- 31. Отдельные разряды слова состояния задей-ствуются в микро-ЭВМ для формирования магистрали управления. Слово состояния выдается на ШД
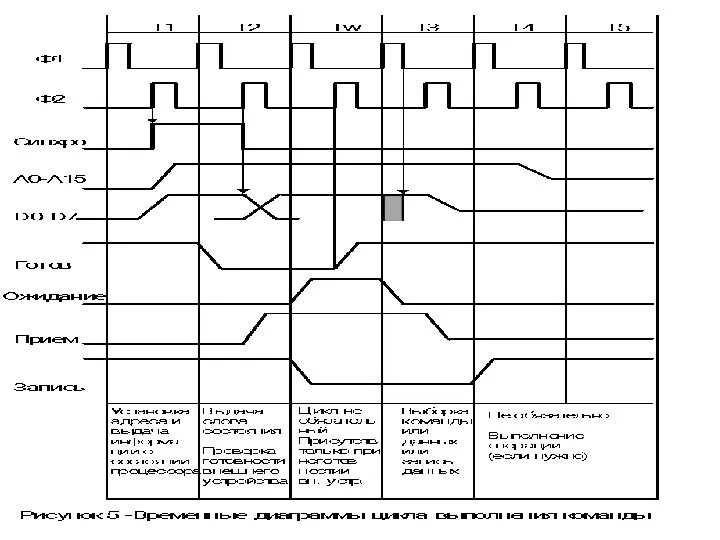
- 32. 1. Извлечение кода команды или данных из памяти или внешнего устройства. Цикл М1 является основным циклом
- 34. На такте Т2 слово состояния записывается в регистр. Положительным фронтом Ф2 заканчивается сигнал “Синхро” и формируется
- 35. Если к моменту появления отрицательного фронта Ф2 на такте Т2 сигнал на входе “Готов” будет иметь
- 36. На такте Т3 в момент отрицательного фронта сигнала Ф1 производится запись данных во внутренний регистр кода
- 37. Отличие машинных циклов чтения данных из памяти или внешнего устройства будет заключаться лишь в том, что
- 38. 2. Запись данных в память или внешнее устройство. На такте Т1 содержимое регистра адреса МП выдается
- 39. Начальная установка. В течение всего времени, пока входе R установлен уровень “1”, все операции в МП
- 40. Режимы работы МП-системы. МП-система ‑ это, в конечном счете, цифровой автомат, который выполняет операции с цифровой
- 41. Установка в состояние 0000Н регистра РС приведет к тому, что на адресную шину будет выдан адрес
- 42. Микропроцессор БИС КР580ВМ80 имеет фиксированный набор команд. Время выполнения команды определяется процессом получения, декодирования и выполнения
- 43. Ряд команд МП предусматривает обработку или передачу чисел двойной длины. В этих случаях пары регистров В
- 44. В трехбайтных командах второй и третий байты содержат 16-разрядные адреса (в командах с прямой адресацией) или
- 45. Для удобства сохранения и восстановления состояния МП во время прерываний и перехода к подпрограммам все указанные
- 46. Для ускорения вычислений некоторые операнды хранятся в блоке РОН. Команды, работающие с этими операндами, используют укороченные
- 47. 3. Система команд микроЭВМ. Последовательность (закон) преобразования информации в ЭВМ задается программой. Программа размещается в ОЗУ
- 48. Поэтому в зависимости от разновидности операции и участвующих в ней устройств в микроЭВМ используются 1-, 2-
- 49. Отличительной особенностью команды условного перехода от команд управления безусловного перехода является проверка значения логического условия в
- 50. Буферные регистры W,Z не являются программно доступными регистрами и используются для выполнения команд внутри МП БИС.
- 51. Кроме двоичной системы, в ЭВМ часто используется шестнадцатеричная система счисления. Более компактная запись чисел в этой
- 52. Сначала двоичное число разбивается на тетрады, затем каждая тетрада заменяется соответствующим шестнадцатеричным сим-волом. Например, разбиение целого
- 53. Команды передачи данных Первая группа команд обеспечивает выполнение операций размещения, обмена, загрузки и перемещения данных. Число
- 54. Команды MOV M,Rj осуществляют передачу содержимого одного из РОН в ячейку памяти с адресом, указанным в
- 55. Команды MOV Ri,M осуществляют передачу содержимого ячейки памяти М с адресом, указанным в регистровой паре H,L,
- 56. MVI M,V (код – 36(16)) осуществляет непосредственную передачу второго байта команды V в ячейку с адресом,
- 57. LHLD аа загружает регистровую пару H,L содержимым ячеек памяти с адресами аа, аа+1, т.е. Н⇐М (аа+1),
- 58. Арифметические команды Эти команды предназначены для выполнения операции сложения, сложения с переносом, вычитания, вычитания с заёмом,
- 59. Рассмотрим команды этой группы: ADD Ri осуществляет сложение в прямых кодах содержимого аккумулятора и операнда, находящегося
- 60. ADI V выполняет сложение в АЛУ аккумулятора с операндом в команде, результат сложения заносит в А.
- 61. Логические команды Задачей этих команд является выполнение поразрядной конъюнкции, дизъюнкции , сложения по модулю 2, сравнения
- 62. Команды передачи управления Четвертая группа команд содержит команды перехода, вызова, возврата и повторного запуска. Эта группа
- 63. CALL aa выполняет безусловный переход на аа(16) = (байт3, байт2) команды. При этом прерванный адрес в
- 64. Данная команда осуществляет безусловный переход на аа, однако часто требуется переход к подпрограмме в зависимости от
- 65. В этих командах проверяются условия аналогично командам условного перехода и при истинности условий реализуют функции CALL
- 66. Команды ввода/вывода из периферийных устройств и организации прерываний Последняя группа команд выполняет операции помещения в стек
- 67. PUSH RP помещает содержимое регистровой пары RP в стек. В ячейку М(SP-1) помещает значение старшего регистра,
- 68. POP RP извлекает из стека в регистровую пару RP содержимое двух ячеек памяти, в младший регистр
- 69. Программа 1.1 (в мнемокодах) Мнемокод Комментарий LDA 0В00 Получить число из адреса 0В00. CMA Инвертировать число.
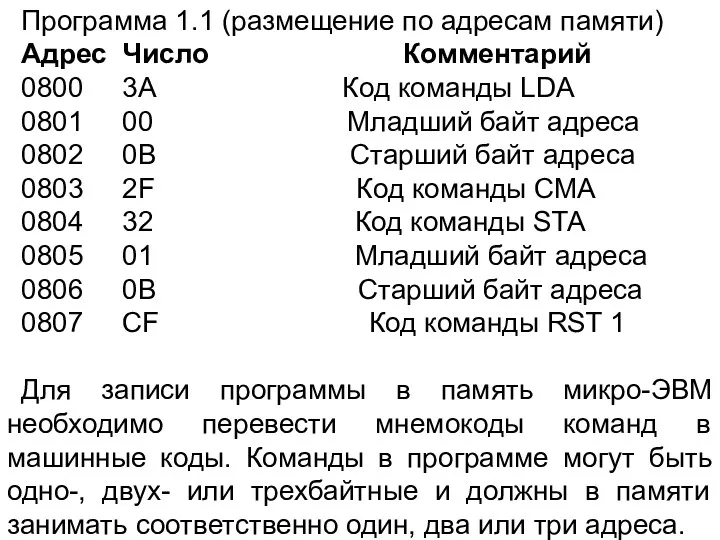
- 70. Программа 1.1 (размещение по адресам памяти) Адрес Число Комментарий 0800 3А Код команды LDA 0801 00
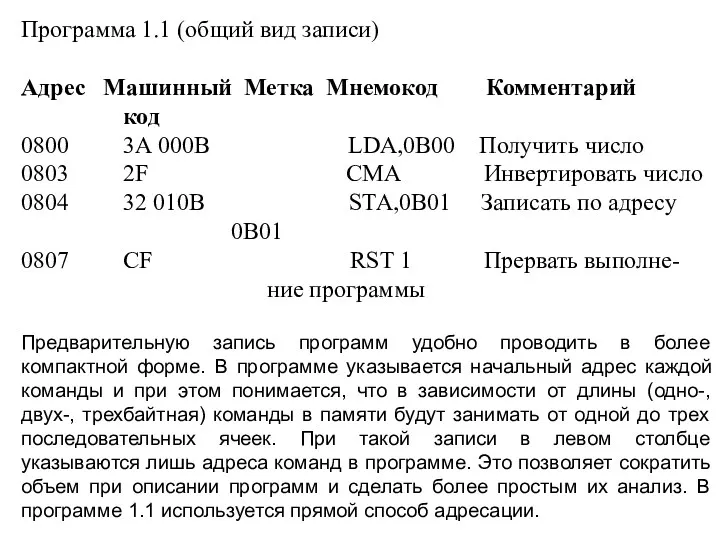
- 71. Предварительную запись программ удобно проводить в более компактной форме. В программе указывается начальный адрес каждой команды
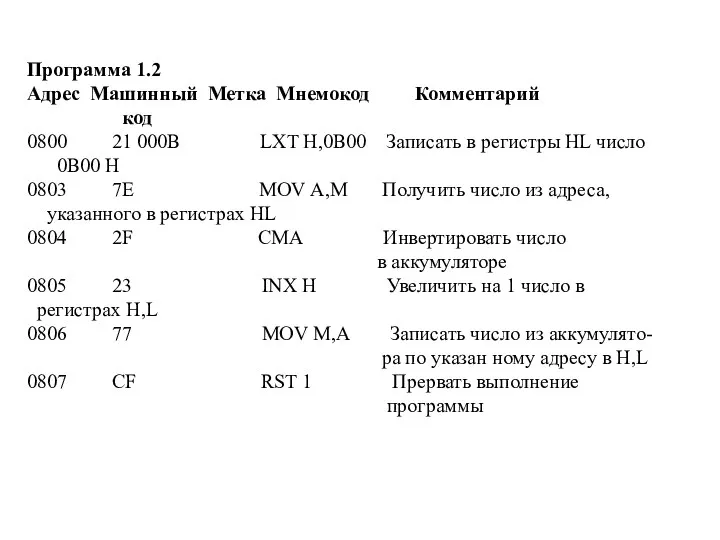
- 72. Программа 1.2 Адрес Машинный Метка Мнемокод Комментарий код 0800 21 000В LXT H,0В00 Записать в регистры
- 74. Скачать презентацию
Микропроцессор.
Структурная схема микроЭВМ.
Система команд микроЭВМ.
Организация памяти МП-системы.
Микропроцессор.
Структурная схема микроЭВМ.
Система команд микроЭВМ.
Организация памяти МП-системы.
С развитием технологии и схемотехники цифровых интегральных схем появилась возможность создавать
С развитием технологии и схемотехники цифровых интегральных схем появилась возможность создавать
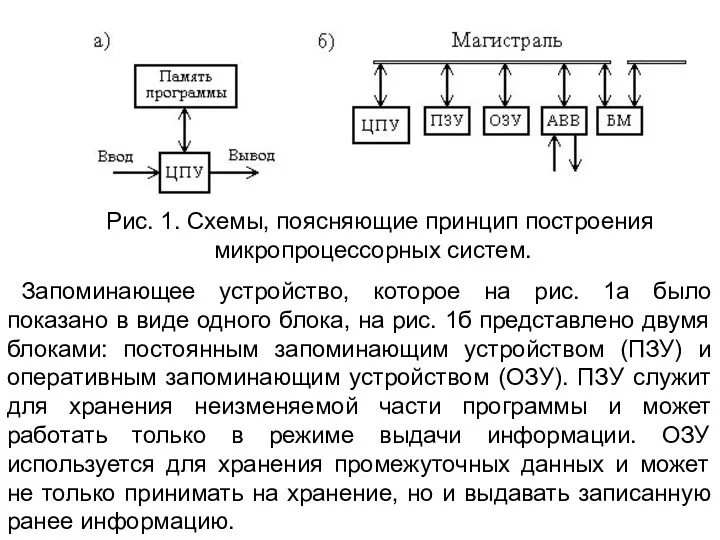
Рис. 1. Схемы, поясняющие принцип построения микропроцессорных систем.
Запоминающее устройство, которое на
Рис. 1. Схемы, поясняющие принцип построения микропроцессорных систем.
Запоминающее устройство, которое на
Для того чтобы согласовать устройства ввода-вывода информации с магистралью, служат адаптеры
Для того чтобы согласовать устройства ввода-вывода информации с магистралью, служат адаптеры
Микропроцессорные наборы, совместимые по принятым системам команд, уровням сигна-лов, принципам передачи
Микропроцессорные наборы, совместимые по принятым системам команд, уровням сигна-лов, принципам передачи
Наибольшей популярностью пользуется МП серии К580 ‑ аналог 8080. В значительной
Наибольшей популярностью пользуется МП серии К580 ‑ аналог 8080. В значительной
В конце 1973 года фирма Intel выпустила микро-процессор 8080, который синхронизировался
В конце 1973 года фирма Intel выпустила микро-процессор 8080, который синхронизировался
Состав МПК БИС К580
Тип БИС Наименование
КР580ВМ80 Микропроцессор
КР580ВВ55 Программируемый параллельный интерфейс
КР580ВВ51 Программируемый
Состав МПК БИС К580
Тип БИС Наименование
КР580ВМ80 Микропроцессор
КР580ВВ55 Программируемый параллельный интерфейс
КР580ВВ51 Программируемый
Отдельные задачи измерительной тех-ники могут эффективно решать однокристальные 8-разрядные микро-ЭВМ серии
Отдельные задачи измерительной тех-ники могут эффективно решать однокристальные 8-разрядные микро-ЭВМ серии
В 1981 г. фирма IBM выпустила на базе микро-процессора 8088 первую
В 1981 г. фирма IBM выпустила на базе микро-процессора 8088 первую
Модель РС использовала до двух внешних накопителей на гибких магнитных дисках
Модель РС использовала до двух внешних накопителей на гибких магнитных дисках
Упрощенная структурная схема, этого МП КР580ВМ80 построенная на его основе МП-системы
Упрощенная структурная схема, этого МП КР580ВМ80 построенная на его основе МП-системы
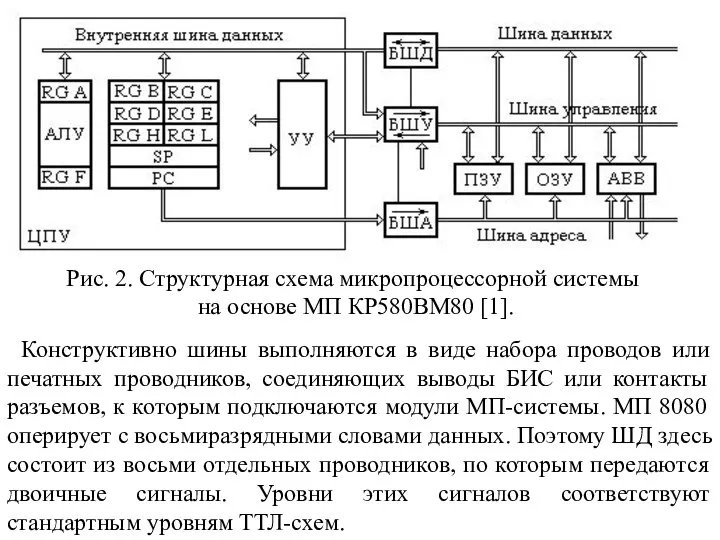
Рис. 2. Структурная схема микропроцессорной системы
на основе МП КР580ВМ80 [1].
Рис. 2. Структурная схема микропроцессорной системы
на основе МП КР580ВМ80 [1].
Шина данных в МП-системе ‑ двунаправлен-ная. Информация по ней может передаваться
Шина данных в МП-системе ‑ двунаправлен-ная. Информация по ней может передаваться
Поэтому часть сигналов управления передается по выводам шины данных в режиме
Поэтому часть сигналов управления передается по выводам шины данных в режиме
Разрядностью шины адреса (ША) определяется предельно возможный объем памяти, которой может
Разрядностью шины адреса (ША) определяется предельно возможный объем памяти, которой может
Внутренняя функциональная схема МП 8080 на рис. 2 показана предельно схематично.
Внутренняя функциональная схема МП 8080 на рис. 2 показана предельно схематично.
Непосредственно к АЛУ примыкает регистр флажков (RG F), в котором хранится
Непосредственно к АЛУ примыкает регистр флажков (RG F), в котором хранится
Бит переноса устанавливается равным 1 при переносе из старшего разряда (переполнение
Бит переноса устанавливается равным 1 при переносе из старшего разряда (переполнение
Не все операции, выполняемые в АЛУ, воздействуют на содержание регистра флажков.
Не все операции, выполняемые в АЛУ, воздействуют на содержание регистра флажков.
Шестнадцатиразрядный регистр SP (stack pointer) ‑это указатель стека, т.е. регистр, информация
Шестнадцатиразрядный регистр SP (stack pointer) ‑это указатель стека, т.е. регистр, информация
Соответственно при помещении в стек очередного слова содержимое регистра SP автоматически
Соответственно при помещении в стек очередного слова содержимое регистра SP автоматически
Показанный на схеме рис. 2 16-разрядный регистр PC (programm counter) ‑
Показанный на схеме рис. 2 16-разрядный регистр PC (programm counter) ‑
Устройство управления УУ, входящее в состав МП (рис. 2), обеспечивает правильное
Устройство управления УУ, входящее в состав МП (рис. 2), обеспечивает правильное
Буферные регистры W,Z не являются программно доступными регистрами и используются для
Буферные регистры W,Z не являются программно доступными регистрами и используются для
Выполнение каждой команды производится в МП БИС в строго определенной последовательности,
Выполнение каждой команды производится в МП БИС в строго определенной последовательности,
При анализе процессов будем использовать следующие понятия:
Машинный цикл (М)-время , требуемое
При анализе процессов будем использовать следующие понятия:
Машинный цикл (М)-время , требуемое
1. Извлечение кода команды (М1).
2. Чтение данных из памяти.
3. Запись данных
1. Извлечение кода команды (М1).
2. Чтение данных из памяти.
3. Запись данных
Отдельные разряды слова состояния задей-ствуются в микро-ЭВМ для формирования магистрали управления.
Отдельные разряды слова состояния задей-ствуются в микро-ЭВМ для формирования магистрали управления.
1. Извлечение кода команды или данных из памяти или внешнего устройства.
Цикл
1. Извлечение кода команды или данных из памяти или внешнего устройства.
Цикл
На такте Т2 слово состояния записывается в регистр. Положительным фронтом Ф2
На такте Т2 слово состояния записывается в регистр. Положительным фронтом Ф2
Если к моменту появления отрицательного фронта Ф2 на такте Т2 сигнал
Если к моменту появления отрицательного фронта Ф2 на такте Т2 сигнал
На такте Т3 в момент отрицательного фронта сигнала Ф1 производится запись
На такте Т3 в момент отрицательного фронта сигнала Ф1 производится запись
Отличие машинных циклов чтения данных из памяти или внешнего устройства будет
Отличие машинных циклов чтения данных из памяти или внешнего устройства будет
2. Запись данных в память или внешнее устройство.
На такте Т1 содержимое
2. Запись данных в память или внешнее устройство.
На такте Т1 содержимое
Начальная установка.
В течение всего времени, пока входе R установлен уровень “1”,
Начальная установка.
В течение всего времени, пока входе R установлен уровень “1”,
Режимы работы МП-системы. МП-система ‑ это, в конечном счете, цифровой автомат,
Режимы работы МП-системы. МП-система ‑ это, в конечном счете, цифровой автомат,
Установка в состояние 0000Н регистра РС приведет к тому, что на
Установка в состояние 0000Н регистра РС приведет к тому, что на
Микропроцессор БИС КР580ВМ80 имеет фиксированный набор команд. Время выполнения команды определяется
Микропроцессор БИС КР580ВМ80 имеет фиксированный набор команд. Время выполнения команды определяется
Ряд команд МП предусматривает обработку или передачу чисел двойной длины. В
Ряд команд МП предусматривает обработку или передачу чисел двойной длины. В
В трехбайтных командах второй и третий байты содержат 16-разрядные адреса (в
В трехбайтных командах второй и третий байты содержат 16-разрядные адреса (в
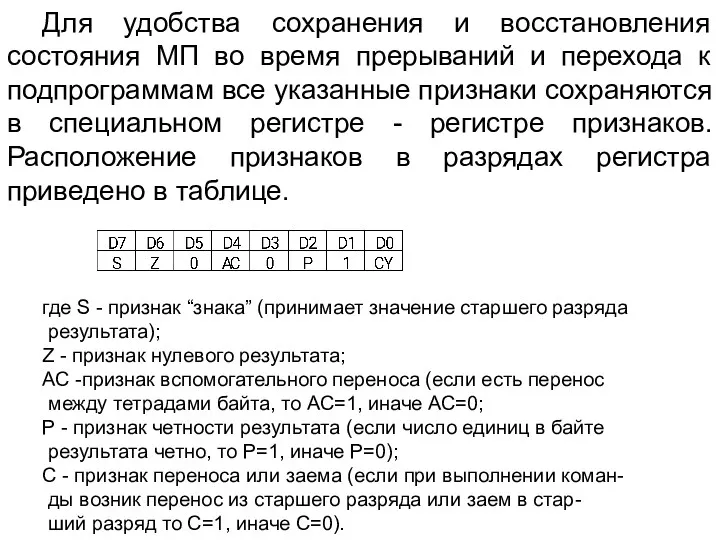
Для удобства сохранения и восстановления состояния МП во время прерываний и
Для удобства сохранения и восстановления состояния МП во время прерываний и
Для ускорения вычислений некоторые операнды хранятся в блоке РОН. Команды, работающие
Для ускорения вычислений некоторые операнды хранятся в блоке РОН. Команды, работающие
3. Система команд микроЭВМ.
Последовательность (закон) преобразования информации в ЭВМ задается
3. Система команд микроЭВМ.
Последовательность (закон) преобразования информации в ЭВМ задается
Поэтому в зависимости от разновидности операции и участвующих в ней устройств
Поэтому в зависимости от разновидности операции и участвующих в ней устройств
Отличительной особенностью команды условного перехода от команд управления безусловного перехода является
Отличительной особенностью команды условного перехода от команд управления безусловного перехода является
Буферные регистры W,Z не являются программно доступными регистрами и используются для
Буферные регистры W,Z не являются программно доступными регистрами и используются для
Кроме двоичной системы, в ЭВМ часто используется шестнадцатеричная система счисления. Более
Кроме двоичной системы, в ЭВМ часто используется шестнадцатеричная система счисления. Более
Сначала двоичное число разбивается на тетрады, затем каждая тетрада заменяется соответствующим
Сначала двоичное число разбивается на тетрады, затем каждая тетрада заменяется соответствующим
Команды передачи данных
Первая группа команд обеспечивает выполнение операций размещения, обмена, загрузки
Команды передачи данных
Первая группа команд обеспечивает выполнение операций размещения, обмена, загрузки
Команды MOV M,Rj осуществляют передачу содержимого одного из РОН в ячейку
Команды MOV M,Rj осуществляют передачу содержимого одного из РОН в ячейку
Команды MOV Ri,M осуществляют передачу содержимого ячейки памяти М с адресом,
Команды MOV Ri,M осуществляют передачу содержимого ячейки памяти М с адресом,
MVI M,V (код – 36(16)) осуществляет непосредственную передачу второго байта команды
MVI M,V (код – 36(16)) осуществляет непосредственную передачу второго байта команды
LHLD аа загружает регистровую пару H,L содержимым ячеек памяти с адресами
LHLD аа загружает регистровую пару H,L содержимым ячеек памяти с адресами
Арифметические команды
Эти команды предназначены для выполнения операции сложения, сложения с переносом,
Арифметические команды
Эти команды предназначены для выполнения операции сложения, сложения с переносом,
Рассмотрим команды этой группы:
ADD Ri осуществляет сложение в прямых кодах содержимого
Рассмотрим команды этой группы:
ADD Ri осуществляет сложение в прямых кодах содержимого
ADI V выполняет сложение в АЛУ аккумулятора с операндом в команде,
ADI V выполняет сложение в АЛУ аккумулятора с операндом в команде,
Логические команды
Задачей этих команд является выполнение поразрядной конъюнкции, дизъюнкции , сложения
Логические команды
Задачей этих команд является выполнение поразрядной конъюнкции, дизъюнкции , сложения
Команды передачи управления
Четвертая группа команд содержит команды перехода, вызова, возврата и
Команды передачи управления
Четвертая группа команд содержит команды перехода, вызова, возврата и
CALL aa выполняет безусловный переход на аа(16) = (байт3, байт2) команды.
CALL aa выполняет безусловный переход на аа(16) = (байт3, байт2) команды.
Данная команда осуществляет безусловный переход на аа, однако часто требуется переход
Данная команда осуществляет безусловный переход на аа, однако часто требуется переход
В этих командах проверяются условия аналогично командам условного перехода и
В этих командах проверяются условия аналогично командам условного перехода и
Команды ввода/вывода из периферийных устройств и организации прерываний
Последняя группа команд выполняет
Команды ввода/вывода из периферийных устройств и организации прерываний
Последняя группа команд выполняет
PUSH RP помещает содержимое регистровой пары RP в стек. В ячейку
PUSH RP помещает содержимое регистровой пары RP в стек. В ячейку
POP RP извлекает из стека в регистровую пару RP содержимое двух
POP RP извлекает из стека в регистровую пару RP содержимое двух
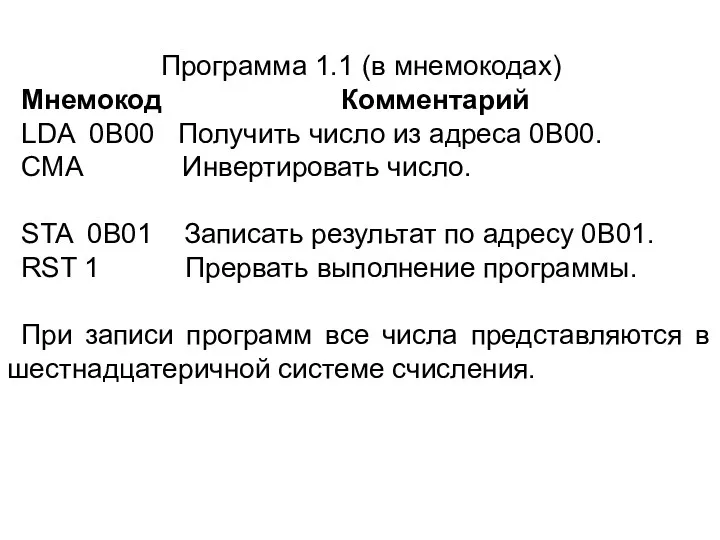
Программа 1.1 (в мнемокодах)
Мнемокод Комментарий
LDA 0В00 Получить число из
Программа 1.1 (в мнемокодах)
Мнемокод Комментарий
LDA 0В00 Получить число из
Программа 1.1 (размещение по адресам памяти)
Адрес Число Комментарий
0800 3А Код
Программа 1.1 (размещение по адресам памяти)
Адрес Число Комментарий
0800 3А Код
Предварительную запись программ удобно проводить в более компактной форме. В программе
Предварительную запись программ удобно проводить в более компактной форме. В программе
Программа 1.2
Адрес Машинный Метка Мнемокод Комментарий
код
0800 21 000В LXT
Программа 1.2
Адрес Машинный Метка Мнемокод Комментарий
код
0800 21 000В LXT
 Профессия - техник. Техническая эксплуатация и обслуживание электрического и электромеханического оборудования
Профессия - техник. Техническая эксплуатация и обслуживание электрического и электромеханического оборудования История книги.
История книги. Уральські гори
Уральські гори Тематическая беседа с родителями на тему Как понять подростка
Тематическая беседа с родителями на тему Как понять подростка Наследственные болезни человека, их причины и профилактика
Наследственные болезни человека, их причины и профилактика Проект по географии 7 класс Остров Робинзона Крузо: миф или реальность
Проект по географии 7 класс Остров Робинзона Крузо: миф или реальность Информация для родителей. Критические периоды в развитии речевой функции у детей.
Информация для родителей. Критические периоды в развитии речевой функции у детей. Техническое обслуживание и ремонт автомобильного транспорта
Техническое обслуживание и ремонт автомобильного транспорта Важнейшее христианское таинство - крещение
Важнейшее христианское таинство - крещение Концепция экологического менеджмента. Система экологического менеджмента. Требования к системе экологического менеджмента
Концепция экологического менеджмента. Система экологического менеджмента. Требования к системе экологического менеджмента презентация исследовательской работы по географии Миграции в МБОУ Северская СОШ
презентация исследовательской работы по географии Миграции в МБОУ Северская СОШ Экономика родного края. Тульская область
Экономика родного края. Тульская область Социальный проект Равные права - равные возможности
Социальный проект Равные права - равные возможности Макроэкономические показатели. (Лекция 6)
Макроэкономические показатели. (Лекция 6) Тема 2. AD-AS
Тема 2. AD-AS Окончание и основа. 2 класс
Окончание и основа. 2 класс Стойкость и защита древесины
Стойкость и защита древесины Как развивалась жизнь на земле презентация по природоведению для 5 класса по программе Сонина
Как развивалась жизнь на земле презентация по природоведению для 5 класса по программе Сонина Урок обобщения и систематизации знаний по теме: Важнейшие классы неорганических соединений.
Урок обобщения и систематизации знаний по теме: Важнейшие классы неорганических соединений. Презентация к уроку технологии Двухтрубный пароход (оригами)
Презентация к уроку технологии Двухтрубный пароход (оригами) Подходы в определении видов профессиональной деятельности и анализ потребности в умениях
Подходы в определении видов профессиональной деятельности и анализ потребности в умениях Внеклассное мероприятие В гостях у сказки
Внеклассное мероприятие В гостях у сказки Викторина по английскому языку, 6 класс
Викторина по английскому языку, 6 класс Інформація та інформаційні процеси
Інформація та інформаційні процеси Семейные праздники
Семейные праздники Армии и войны русского феодального общества
Армии и войны русского феодального общества Группы крови АВ0 и резус. Принадлежность крови
Группы крови АВ0 и резус. Принадлежность крови Деформации и напряжения при сварке
Деформации и напряжения при сварке