- Микропроцессорная система централизации типа МПЦ-И

Содержание
- 2. ЦЕЛЬ создания системы 1 БЕЗОПАСНОСТЬ НАДЕЖНОСТЬ ЭФФЕКТИВНОСТЬ перевод релейных систем электрической централизации на микропроцессорную элементную базу
- 3. Особенности системы МПЦ-И Создание информационно-управляющих систем любой конфигурации
- 4. Назначение системы для автоматизированного управления напольными объектами для оснащения железнодорожных станций любой конфигурации, расположенных на одно-,
- 5. Общая структура системы МПЦ-И верхний уровень – АРМ ДСП, АРМ ШН,ШТК средний уровень – УКЦ нижний
- 6. Управляющий контроллер централизации (УКЦ) предназначен для ввода, обработки по заданному алгоритму и вывода технологической информации о
- 7. Режимы работы МПЦ-И нормальный режим работы реализуется маршрутный и раздельный способы управления стрелками осуществляется контроль состояния
- 8. Структурная схема электропитания устройств МПЦ-И
- 9. Схема ввода текстовых сигналов для контроля состояния светофоров Сигналы П-ТФ1 и П-ТФ2, П-ТТ1 и П-ТТ2 используются
- 10. Аппаратные части включают в себя: - интерфейсные реле или собственные входы объектов управления; - устройства сопряжения
- 11. Схема переключения режимов работы МПЦ-И Переход в режим РУ осуществляется нажатием на пульте РУ кнопки РУ
- 12. Схема включения реле пригласительных сигналов Информации в УКЦ о фактическом горении лунно-белого огня пригласительного сигнала на
- 13. Схема управления стрелкой Фактическое положение стрелок контролируется УКЦ через контакты реле ПК (плюсовой контроль) или МК
- 15. Скачать презентацию
ЦЕЛЬ создания системы
1
БЕЗОПАСНОСТЬ
НАДЕЖНОСТЬ
ЭФФЕКТИВНОСТЬ
перевод релейных систем электрической централизации
на микропроцессорную элементную базу
ЦЕЛЬ создания системы
1
БЕЗОПАСНОСТЬ
НАДЕЖНОСТЬ
ЭФФЕКТИВНОСТЬ
перевод релейных систем электрической централизации
на микропроцессорную элементную базу
Особенности системы МПЦ-И
Создание информационно-управляющих систем любой конфигурации
Особенности системы МПЦ-И
Создание информационно-управляющих систем любой конфигурации

Назначение системы
для автоматизированного управления напольными объектами
для оснащения железнодорожных станций любой конфигурации,
Назначение системы
для автоматизированного управления напольными объектами
для оснащения железнодорожных станций любой конфигурации,
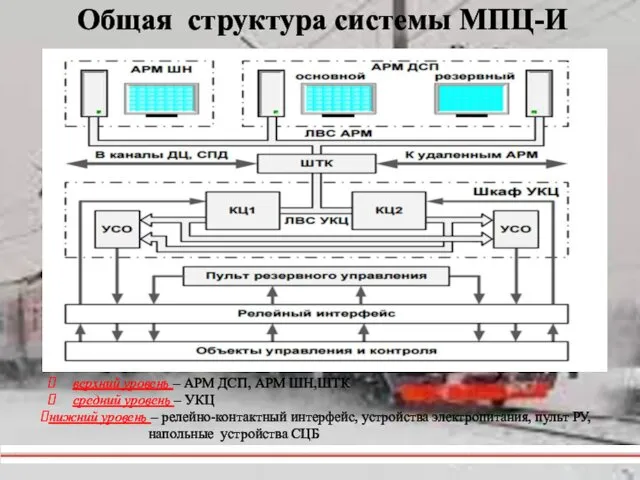
Общая структура системы МПЦ-И
верхний уровень – АРМ ДСП, АРМ ШН,ШТК
средний уровень
Общая структура системы МПЦ-И
верхний уровень – АРМ ДСП, АРМ ШН,ШТК
средний уровень

Управляющий контроллер централизации (УКЦ)
предназначен для ввода, обработки по заданному алгоритму
Управляющий контроллер централизации (УКЦ)
предназначен для ввода, обработки по заданному алгоритму
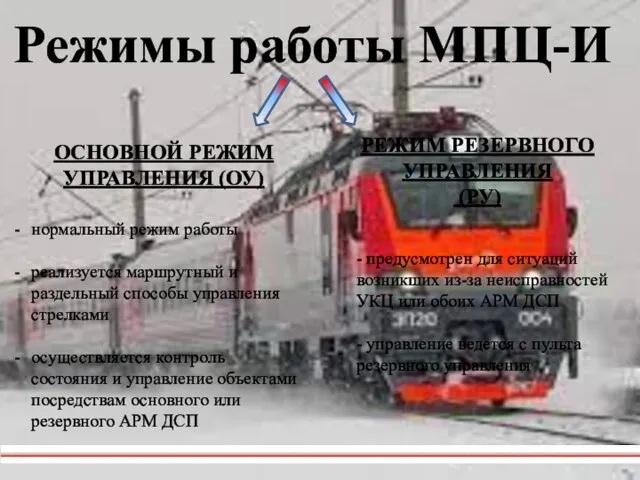
Режимы работы МПЦ-И
нормальный режим работы
реализуется маршрутный и раздельный способы управления стрелками
осуществляется
Режимы работы МПЦ-И
нормальный режим работы
реализуется маршрутный и раздельный способы управления стрелками
осуществляется

Структурная схема электропитания устройств МПЦ-И
Структурная схема электропитания устройств МПЦ-И
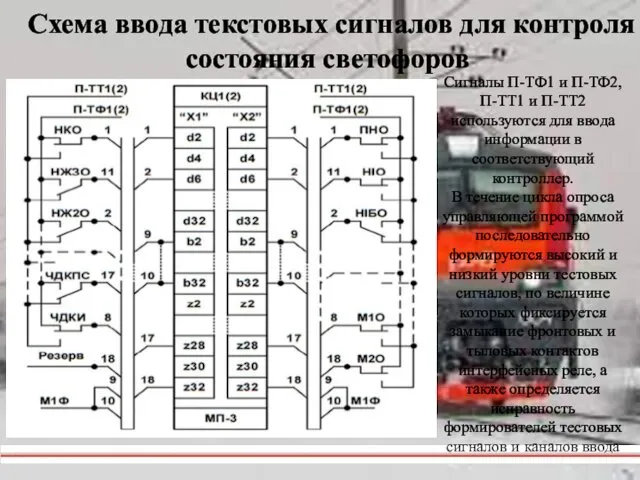
Схема ввода текстовых сигналов для контроля состояния светофоров
Сигналы П-ТФ1 и П-ТФ2,
Схема ввода текстовых сигналов для контроля состояния светофоров
Сигналы П-ТФ1 и П-ТФ2,

Аппаратные части включают в себя:
- интерфейсные реле или собственные входы объектов
Аппаратные части включают в себя:
- интерфейсные реле или собственные входы объектов
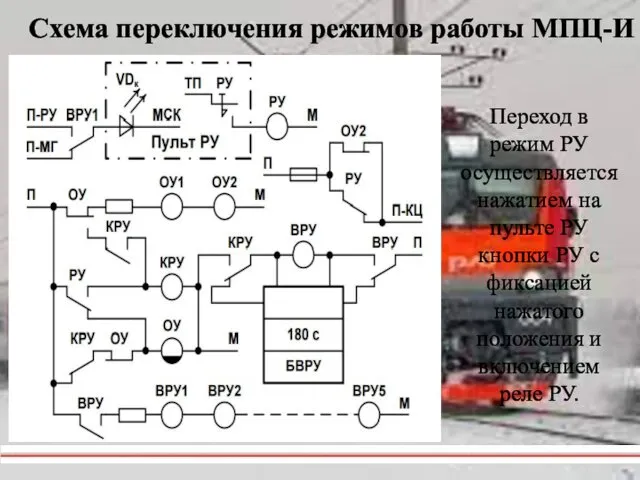
Схема переключения режимов работы МПЦ-И
Переход в режим РУ осуществляется нажатием на
Схема переключения режимов работы МПЦ-И
Переход в режим РУ осуществляется нажатием на

Схема включения реле пригласительных сигналов
Информации в УКЦ о фактическом горении лунно-белого
Схема включения реле пригласительных сигналов
Информации в УКЦ о фактическом горении лунно-белого

Схема управления стрелкой
Фактическое положение стрелок контролируется УКЦ через контакты реле ПК
Схема управления стрелкой
Фактическое положение стрелок контролируется УКЦ через контакты реле ПК
 Проект Умный дом
Проект Умный дом Космологический аргумент. Христианская апологетика
Космологический аргумент. Христианская апологетика Мультимедийная презентация к семинару Формирование лексико-грамматических категорий у дошкольников
Мультимедийная презентация к семинару Формирование лексико-грамматических категорий у дошкольников Antalis в мире и в России. Бумажная лавка в Москве и Санкт-Петербурге
Antalis в мире и в России. Бумажная лавка в Москве и Санкт-Петербурге Формирование микроклимата в помещении
Формирование микроклимата в помещении ЭРДУ аппарата Smart 1
ЭРДУ аппарата Smart 1 Презентация Выдающиеся спортсмены Саратовской области
Презентация Выдающиеся спортсмены Саратовской области Правописание суффиксов разных частей речи и личных окончаний глаголов. (ОГЭ. Задание 5)
Правописание суффиксов разных частей речи и личных окончаний глаголов. (ОГЭ. Задание 5) Інформаційні основи маркетингових рішень
Інформаційні основи маркетингових рішень Изучение и совершенствование техники волейбола. 5-11 класс
Изучение и совершенствование техники волейбола. 5-11 класс Общеучебные умения и навыки- необходимые условия успешного обучения
Общеучебные умения и навыки- необходимые условия успешного обучения Захист навколишнього середовища
Захист навколишнього середовища ЕГЭ 2018. Результаты ГИА выпускников, освоивших программу среднего общего образования по биологии
ЕГЭ 2018. Результаты ГИА выпускников, освоивших программу среднего общего образования по биологии Проценты и отношения. Решение задач
Проценты и отношения. Решение задач Информационные технологии и информационные системы. (Лекция 2)
Информационные технологии и информационные системы. (Лекция 2) Решение задач с помощью уравнений
Решение задач с помощью уравнений Основные виды помех средствам активной радиолокации
Основные виды помех средствам активной радиолокации Просвещенный абсолютизм. Союз государей с философами
Просвещенный абсолютизм. Союз государей с философами Плакат. Цілі і види плаката
Плакат. Цілі і види плаката Административное наказание
Административное наказание Школьный историко-краеведческий музей с. Среднее Погромное – хранитель славных страниц истории родного края
Школьный историко-краеведческий музей с. Среднее Погромное – хранитель славных страниц истории родного края Отдел Покрытосеменные. Общая характеристика и значение. 6 класс
Отдел Покрытосеменные. Общая характеристика и значение. 6 класс Магистральные трубопроводы
Магистральные трубопроводы Подготов к ГИА.
Подготов к ГИА. Конспект занятия по развитию мелкой моторики с использованием пескографии Sand-art и ИКТ во второй младшей группе. Тема: Помогите рыбкам
Конспект занятия по развитию мелкой моторики с использованием пескографии Sand-art и ИКТ во второй младшей группе. Тема: Помогите рыбкам Prezentatsia_VKR_BUrdin
Prezentatsia_VKR_BUrdin Скрининг–программа, ее содержание и роль в диагностике ранних отклонений в состоянии здоровья детей
Скрининг–программа, ее содержание и роль в диагностике ранних отклонений в состоянии здоровья детей Gianni Versace
Gianni Versace