- Микропроцессорные системы

Содержание
- 2. Микропроцессор (МП) – программно - управляемое устройство, предназначенное для обработки цифровой информации и управления этим процессом,
- 3. В основу построения МПС положено три принципа. 1. Принцип модульности - система строится на основе ограниченного
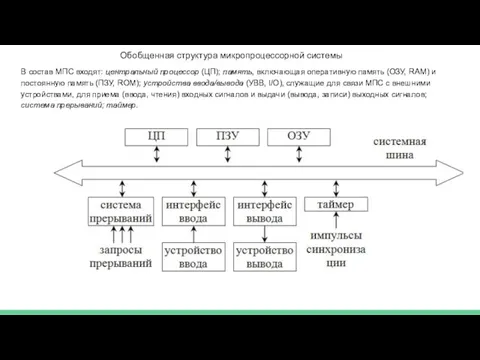
- 4. Обобщенная структура микропроцессорной системы В состав МПС входят: центральный процессор (ЦП); память, включающая оперативную память (ОЗУ,
- 5. Модуль ЦП осуществляет обработку данных и управляет модулями системы. Основные узлы БИС МП: устройство управления (УУ)
- 6. Архитектурные особенности и функциональные возможности 16-разрядных микропроцессоров. К 16-разрядным МП первого поколения принадлежат МП i8086/i8088 и
- 7. В МП i8086 применена конвейерная архитектура, которая позволяет совмещать во времени циклы исполнения и выборки из
- 8. Особенности системы команд языка Ассемблер для разных типов микропроцессоров. Команда определяет операцию, которую выполняет МП над
- 9. Организация устройств ввода/вывода информации в микропроцессорных системах. Одной из важнейших задач проектирования МПС является организация взаимодействия
- 10. Вводом-выводоминформации называют процесс передачи данных между микропроцессором и основной памятью (ОЗУ, ПЗУ), между микропроцессором и внешними
- 11. Программный ввод-вывод инициируется программой работы микропроцессора, т.е. в определенных местах программы записываются команды опроса портов или
- 12. Ввод-вывод по прерываниям производится по инициативе внешних устройств и вводится при необходимости помимо выполнения основной программы
- 13. Ввод-вывод с прямым доступом к памяти (ПДП)используется в случаях, когда необходимо реализовывать обмен между основной памятью
- 14. Управляющие сигналы типового микропроцессора. Кроме информационных линий адреса и данных, микропроцессор снабжен управляющими выводами, образующими вместе
- 15. Сигналы управления прерыванием обычно представлены двумя сигналами: INT(interrupt, прерывание) – входной сигнал от периферийного модуля (контроллера
- 16. Сигналы управления режимом прямого доступа к памятиформируют группу из двух сигналов: HOLD(hold, захват шин) – входной
- 17. Сигналы управления ожиданием служат для синхронизации микропроцессора с медленными устройствами ввода-вывода. Не всегда внешнее устройство может
- 18. Дополнительные сигналыобеспечивают синхронизацию работы микропроцессора с системным контроллером, шинными формирователями, схемой тактового генератора и начальной установки.
- 19. Отличия микроконтроллера от микропроцессора Источник: YouTube-канал Радиолюбитель TV
- 21. Скачать презентацию
Микропроцессор (МП) – программно - управляемое устройство, предназначенное для обработки цифровой
Микропроцессор (МП) – программно - управляемое устройство, предназначенное для обработки цифровой
В основу построения МПС положено три принципа.
1. Принцип модульности - система
В основу построения МПС положено три принципа.
1. Принцип модульности - система
Обобщенная структура микропроцессорной системы
В состав МПС входят: центральный процессор (ЦП); память,
Обобщенная структура микропроцессорной системы
В состав МПС входят: центральный процессор (ЦП); память,

Модуль ЦП осуществляет обработку данных и управляет модулями системы. Основные узлы
Модуль ЦП осуществляет обработку данных и управляет модулями системы. Основные узлы

Архитектурные особенности и функциональные возможности 16-разрядных микропроцессоров.
К 16-разрядным МП первого поколения
Архитектурные особенности и функциональные возможности 16-разрядных микропроцессоров.
К 16-разрядным МП первого поколения

В МП i8086 применена конвейерная архитектура, которая позволяет совмещать во времени
В МП i8086 применена конвейерная архитектура, которая позволяет совмещать во времени
Особенности системы команд языка Ассемблер для разных типов микропроцессоров.
Команда определяет операцию,
Особенности системы команд языка Ассемблер для разных типов микропроцессоров.
Команда определяет операцию,

Организация устройств ввода/вывода информации в микропроцессорных системах.
Одной из важнейших задач проектирования
Организация устройств ввода/вывода информации в микропроцессорных системах.
Одной из важнейших задач проектирования
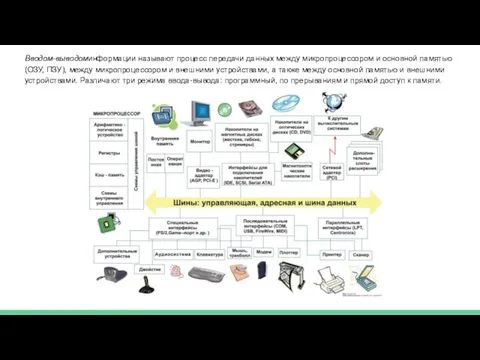
Вводом-выводоминформации называют процесс передачи данных между микропроцессором и основной памятью (ОЗУ,
Вводом-выводоминформации называют процесс передачи данных между микропроцессором и основной памятью (ОЗУ,
Программный ввод-вывод инициируется программой работы микропроцессора, т.е. в определенных местах программы
Программный ввод-вывод инициируется программой работы микропроцессора, т.е. в определенных местах программы

Ввод-вывод по прерываниям производится по инициативе внешних устройств и вводится при
Ввод-вывод по прерываниям производится по инициативе внешних устройств и вводится при
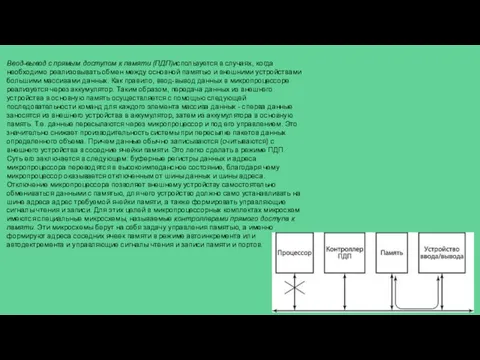
Ввод-вывод с прямым доступом к памяти (ПДП)используется в случаях, когда необходимо
Ввод-вывод с прямым доступом к памяти (ПДП)используется в случаях, когда необходимо
Управляющие сигналы типового микропроцессора.
Кроме информационных линий адреса и данных, микропроцессор снабжен
Управляющие сигналы типового микропроцессора.
Кроме информационных линий адреса и данных, микропроцессор снабжен
Сигналы управления прерыванием обычно представлены двумя сигналами:
INT(interrupt, прерывание) – входной сигнал
Сигналы управления прерыванием обычно представлены двумя сигналами:
INT(interrupt, прерывание) – входной сигнал
Сигналы управления режимом прямого доступа к памятиформируют группу из двух сигналов:
HOLD(hold,
Сигналы управления режимом прямого доступа к памятиформируют группу из двух сигналов:
HOLD(hold,

Сигналы управления ожиданием служат для синхронизации микропроцессора с медленными устройствами ввода-вывода.
Сигналы управления ожиданием служат для синхронизации микропроцессора с медленными устройствами ввода-вывода.
Дополнительные сигналыобеспечивают синхронизацию работы микропроцессора с системным контроллером, шинными формирователями, схемой
Дополнительные сигналыобеспечивают синхронизацию работы микропроцессора с системным контроллером, шинными формирователями, схемой
Отличия микроконтроллера от микропроцессора
Источник: YouTube-канал Радиолюбитель TV
Отличия микроконтроллера от микропроцессора
Источник: YouTube-канал Радиолюбитель TV
 Написание сочинения-рассуждения
Написание сочинения-рассуждения IVoice. Интеллектуальный голосовой помощник для вашего бизнеса
IVoice. Интеллектуальный голосовой помощник для вашего бизнеса Презентация к сценарию праздника Прощай, Букварь.
Презентация к сценарию праздника Прощай, Букварь. Проектирование блочной котельной для гостиницы
Проектирование блочной котельной для гостиницы Путешествие в страну Морфемика. (5 класс)
Путешествие в страну Морфемика. (5 класс) Ислам. Догматика ислама
Ислам. Догматика ислама Применение подобия треугольников в жизни. Измерительные работы на местности
Применение подобия треугольников в жизни. Измерительные работы на местности Научно-исследовательская работа в группе Следопыт
Научно-исследовательская работа в группе Следопыт Цифровые данные. Цифровая технология. Цифровая революция
Цифровые данные. Цифровая технология. Цифровая революция Гипотезы возникновение жизни на Земле
Гипотезы возникновение жизни на Земле Кодирование и обработка графической информации
Кодирование и обработка графической информации Европейские нормативы теплозащиты зданий. Технологии теплозащиты и естественной вентиляции архитектурных сооружений в Казахстане
Европейские нормативы теплозащиты зданий. Технологии теплозащиты и естественной вентиляции архитектурных сооружений в Казахстане Вода
Вода Маленькие герои большой войны. Кто такие пионеры?
Маленькие герои большой войны. Кто такие пионеры? Таблица умножения для младших школьников (тренажер)
Таблица умножения для младших школьников (тренажер) Людовик ван Бетховен
Людовик ван Бетховен Моя театральная деятельность Диск
Моя театральная деятельность Диск Государства на политической карте мира
Государства на политической карте мира Благоустройство объекта Свиридовский пруд
Благоустройство объекта Свиридовский пруд Countable nouns
Countable nouns Опиливание заготовок из сортового проката
Опиливание заготовок из сортового проката Органическая архитектура
Органическая архитектура Уровень и качество жизни населения
Уровень и качество жизни населения Виды треугольников. Логическая задача
Виды треугольников. Логическая задача Затратный подход к оценке собственности
Затратный подход к оценке собственности Презентация Играем вместе
Презентация Играем вместе Михаил Лямин
Михаил Лямин Как стать личностью
Как стать личностью