- Моделирование экстренного торможения судна

Содержание
- 2. «ТИТАНИК» 15 апреля 1912 г. 2
- 3. Последствия столкновения судов active passive 3
- 4. НОМИНАЛЬНЫЕ ХАРАКТЕРИСТИКИ ОБЪЕКТА ОБЪЕКТ МОДЕЛИРОВАНИЯ − танкер ледового класса, оснащённый малооборотным дизельным двигателем, винтом регулируемого шага
- 5. Структура компьютерной модели судна с дизельным двигателем (МОД) и винтом регулируемого шага (ВРШ) 5
- 6. РАБОЧЕЕ ОКНО МОДЕЛИ Главный двигатель (МОД) и его параметры Рабочая характеристика дизеля Модель пульта управления Модель
- 7. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ ДАУ 7
- 8. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ ДАУ 8
- 9. Переходные процессы в режиме изменения шага винта: +100% → -100% 9
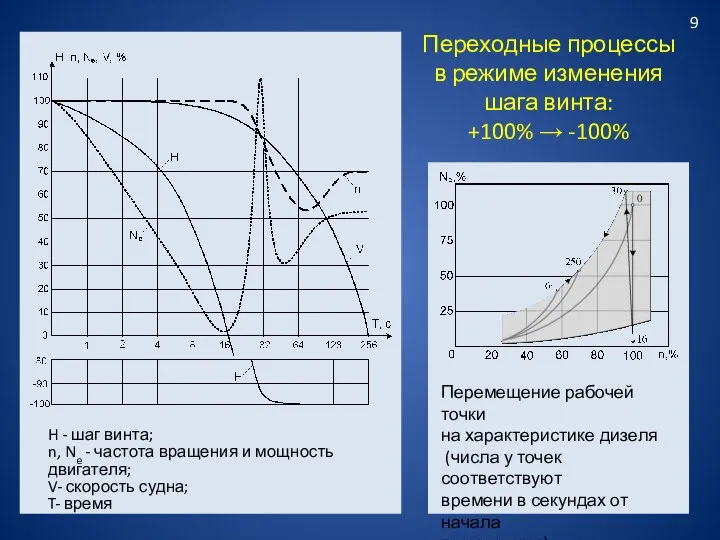
- 10. Переходные процессы в режиме изменения шага винта: +100% → -100% H - шаг винта; n, Ne
- 11. Переходные процессы в режиме изменения шага винта: +100% → -75% (слева) и +100% → -85% (справа)
- 12. Результаты моделирования торможения судна путём перекладки лопастей ВРШ Результаты моделирования торможения судна путём реверса главного двигателя
- 13. ВЫВОДЫ: Торможение судна перекладкой лопастей ВРШ оказалось более выгодным, чем торможение реверсом главного двигателя (дизеля). Для
- 14. Спасибо за внимание! 13
- 16. Скачать презентацию

«ТИТАНИК»
15 апреля 1912 г.
2
«ТИТАНИК»
15 апреля 1912 г.
2

Последствия
столкновения
судов
active
passive
3
Последствия
столкновения
судов
active
passive
3
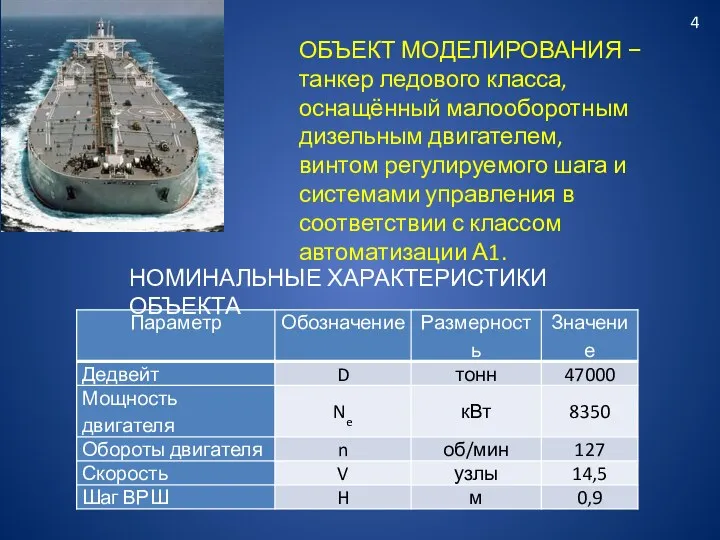
НОМИНАЛЬНЫЕ ХАРАКТЕРИСТИКИ ОБЪЕКТА
ОБЪЕКТ МОДЕЛИРОВАНИЯ − танкер ледового класса, оснащённый малооборотным дизельным
НОМИНАЛЬНЫЕ ХАРАКТЕРИСТИКИ ОБЪЕКТА
ОБЪЕКТ МОДЕЛИРОВАНИЯ − танкер ледового класса, оснащённый малооборотным дизельным
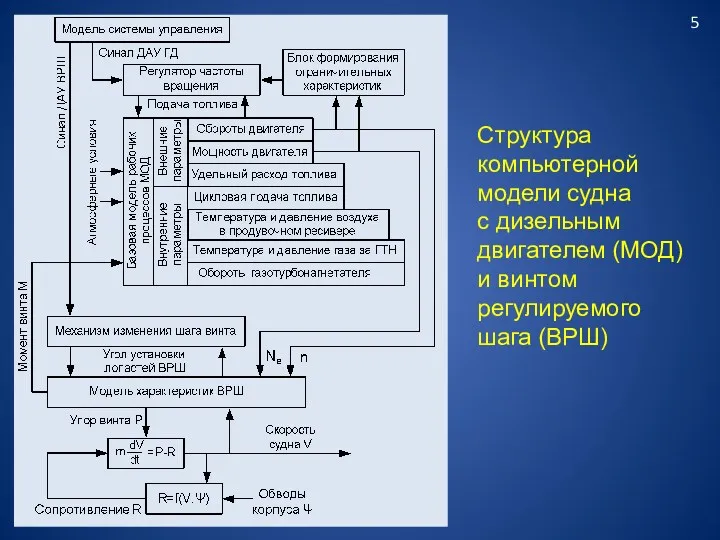
Структура
компьютерной
модели судна
с дизельным
двигателем (МОД)
и винтом
регулируемого
шага (ВРШ)
5
Структура
компьютерной
модели судна
с дизельным
двигателем (МОД)
и винтом
регулируемого
шага (ВРШ)
5
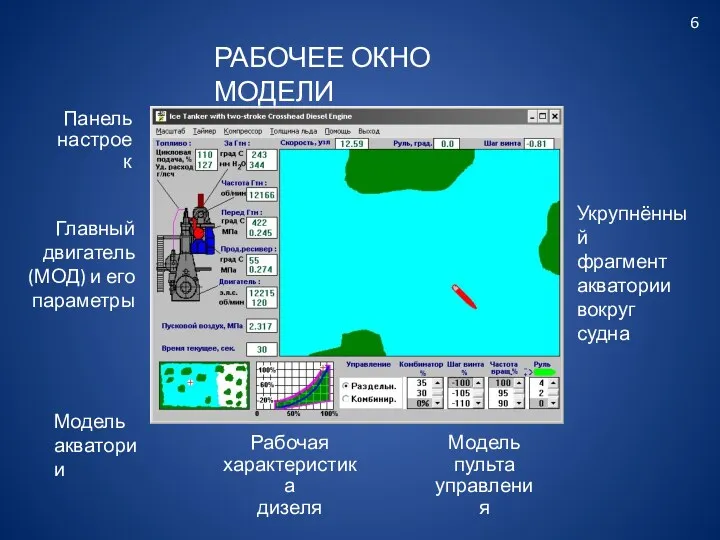
РАБОЧЕЕ ОКНО МОДЕЛИ
Главный
двигатель
(МОД) и его
параметры
Рабочая
характеристика
дизеля
Модель
пульта
управления
Модель
акватории
Укрупнённый
фрагмент
акватории
вокруг
судна
Панель
настроек
6
РАБОЧЕЕ ОКНО МОДЕЛИ
Главный
двигатель
(МОД) и его
параметры
Рабочая
характеристика
дизеля
Модель
пульта
управления
Модель
акватории
Укрупнённый
фрагмент
акватории
вокруг
судна
Панель
настроек
6
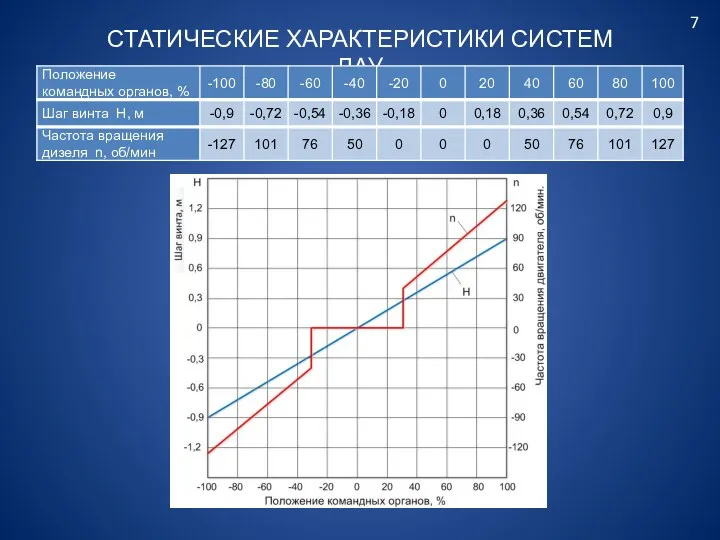
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ ДАУ
7
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ ДАУ
7
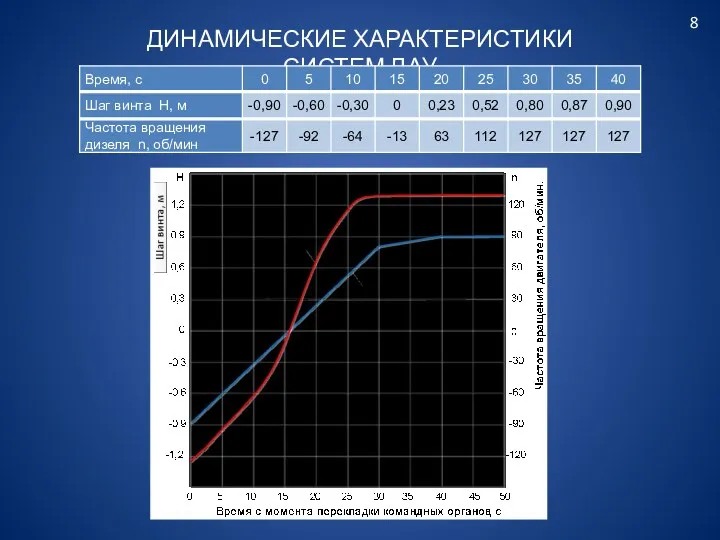
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ ДАУ
8
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ ДАУ
8
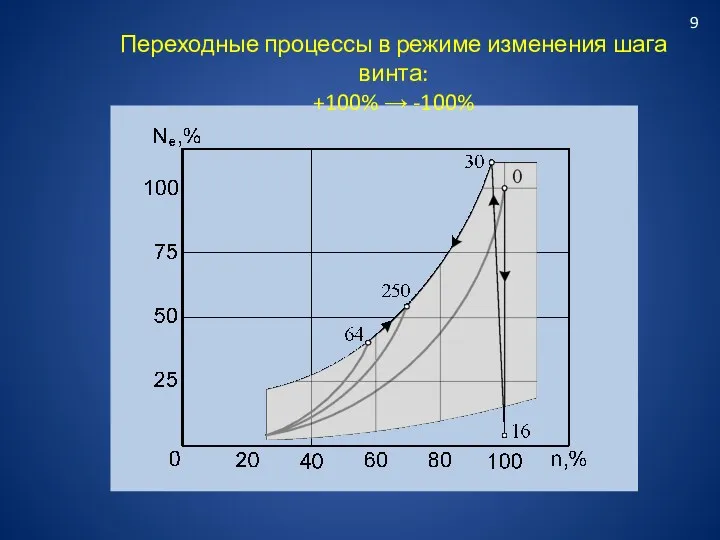
Переходные процессы в режиме изменения шага винта:
+100% → -100%
9
Переходные процессы в режиме изменения шага винта:
+100% → -100%
9
Переходные процессы
в режиме изменения
шага винта:
+100% → -100%
H - шаг
Переходные процессы
в режиме изменения
шага винта:
+100% → -100%
H - шаг
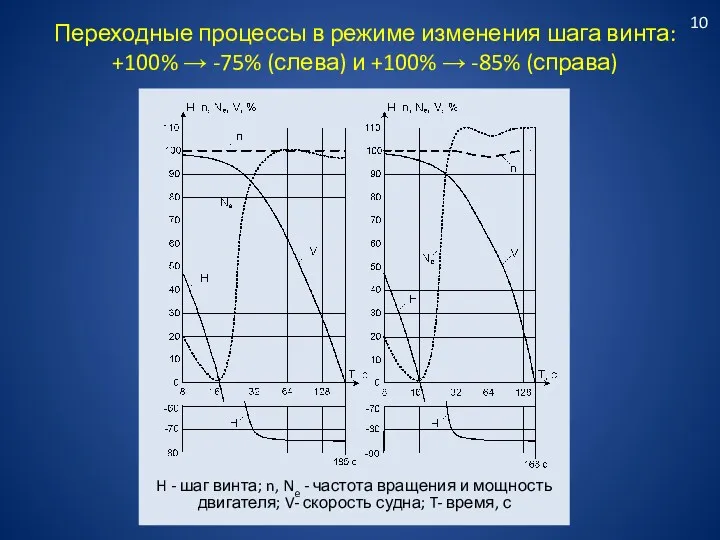
Переходные процессы в режиме изменения шага винта:
+100% → -75% (слева)
Переходные процессы в режиме изменения шага винта:
+100% → -75% (слева)
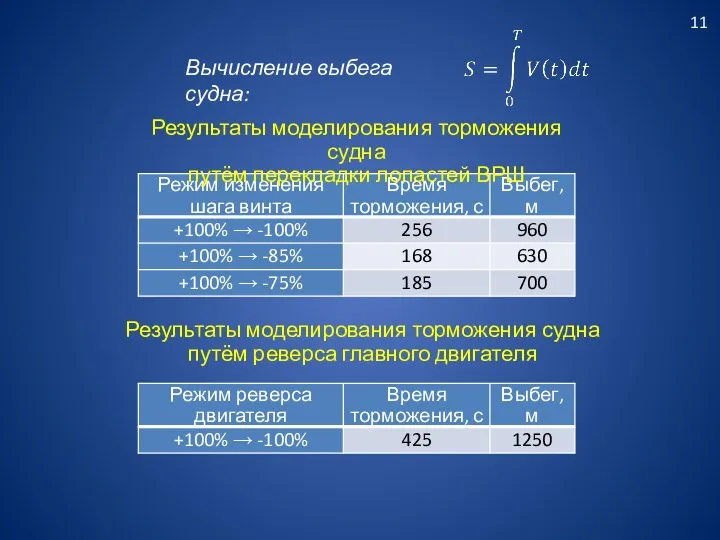
Результаты моделирования торможения судна
путём перекладки лопастей ВРШ
Результаты моделирования торможения судна
путём реверса
Результаты моделирования торможения судна
путём перекладки лопастей ВРШ
Результаты моделирования торможения судна
путём реверса
ВЫВОДЫ:
Торможение судна перекладкой лопастей ВРШ оказалось более выгодным, чем торможение реверсом
ВЫВОДЫ:
Торможение судна перекладкой лопастей ВРШ оказалось более выгодным, чем торможение реверсом
Спасибо за внимание!
13
Спасибо за внимание!
13
 Конкурс на лучший стенд (уголок) Эколята – молодые защитники природы в ДОО и ОУ Песчанокопского района
Конкурс на лучший стенд (уголок) Эколята – молодые защитники природы в ДОО и ОУ Песчанокопского района Стадии развития психики в филогенезе. Характеристика сознания
Стадии развития психики в филогенезе. Характеристика сознания Родительское собрание Умеете ли вы любить своего ребёнка ?
Родительское собрание Умеете ли вы любить своего ребёнка ? Дымковская и Городецкая игрушка (особенности росписи)
Дымковская и Городецкая игрушка (особенности росписи) Государственный исторический музей
Государственный исторический музей Информационный проект Чесма. История морского сражения
Информационный проект Чесма. История морского сражения Информационная культура. Этические и правовые нормы информационной деятельности челове
Информационная культура. Этические и правовые нормы информационной деятельности челове Исследовательская подводная лодка
Исследовательская подводная лодка Российская империя в 1900-1917 годах. Повторительно-обобщающий урок
Российская империя в 1900-1917 годах. Повторительно-обобщающий урок Христианство
Христианство Профилактика экстремистской деятельности в подростковой среде
Профилактика экстремистской деятельности в подростковой среде Неделя химии
Неделя химии Ребусы в картинках
Ребусы в картинках Эмоции и мимика
Эмоции и мимика Объемы и площади. Куб
Объемы и площади. Куб Программа Нұрлы Жер. Новые направления жилищного строительства
Программа Нұрлы Жер. Новые направления жилищного строительства Рождество Девы Марии
Рождество Девы Марии Фосфор, его физические и химические свойства
Фосфор, его физические и химические свойства Формирование финансового капитала организации
Формирование финансового капитала организации Символы в искусстве
Символы в искусстве Виноград как сырье
Виноград как сырье Русская реклама. Размещение рекламы в Facebook и Instagram
Русская реклама. Размещение рекламы в Facebook и Instagram Профессия Gameplay программиста. Особенности работы на ААА проекте
Профессия Gameplay программиста. Особенности работы на ААА проекте Теоретические основы компрессорной эксплуатации скважин
Теоретические основы компрессорной эксплуатации скважин Развивающая предметно - пространственная среда гр. №5
Развивающая предметно - пространственная среда гр. №5 Каскад колокольчиков
Каскад колокольчиков ТРИЗ. Введение. Классификация задач. 2 часть
ТРИЗ. Введение. Классификация задач. 2 часть Татар теле дәресе 4 сыйныф
Татар теле дәресе 4 сыйныф