- Моделирование нестационарных динамических систем

Содержание
- 2. Содержание. ВВЕДЕНИЕ 1. Постановка задач на имитационное моделирование и анализ динамических свойств параметрических систем управления. 2.
- 3. ВВЕДЕНИЕ Суть подхода синтеза адаптивных систем, предложенного академиком С.В.Емельяновым состоит в систематическом применении при структурном синтезе
- 4. Если в обычных САУ с координатной обратной связью (КОС) необходимость в автоматическом способе формирования выходного сигнала
- 5. Исходно посылкой в новой методологической основе построения структурных схем САУ, позволяющей расширить возможности автоматических систем по
- 6. Переменная-оператор (сигнал-оператор) представляет собой какое-либо преобразование, осуществляемое над переменными-координатами. Введенное различие между переменными- координатами и переменными-операторами
- 7. Двойственное толкование переменных состояния нелинейной динамической системы будем именовать принципом бинарности, а динамические системы, построенные на
- 8. 1. Постановка задачи на моделирование и анализ динамики параметрических систем уравнения. Рассмотрим методы управления возмущёнными движениями
- 9. Функционально-алгоритмическая структура Если координатно-операторной обратной связью дополнить структурную схему системы с КОС, то получим структурную схему
- 10. ЗАДАТЧИК СИСТЕМЫ Выходная координата Управляющее воздействие Параметрические возмущения Координатно-операторная обратная связь (КООС) ЗАДАТЧИК КООС 1 ОШИБКА
- 11. В этом случае система с КОС выступает в качестве звена координатно-операторного типа Pх и выполняет в
- 12. В терминах теории автоматического управления изменение параметров системы во времени можно интерпретировать как влияние возмущений параметрического
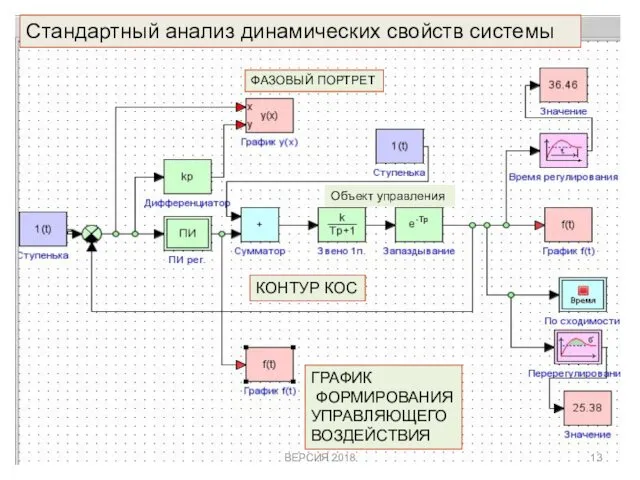
- 13. ВЕРСИЯ 2018 Стандартный анализ динамических свойств системы КОНТУР КОС ФАЗОВЫЙ ПОРТРЕТ ГРАФИК ФОРМИРОВАНИЯ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ Объект
- 14. Единичное воздействие по ЗАДАНИЮ К=1 Т=1 ТАУ=1 К1=1.6 К2= 0.125 ВЕРСИЯ 2018 Y(t) t
- 15. ФАЗОВЫЙ ПОРТРЕТ системы в результате моделирования ВЕРСИЯ 2018 X2(t) X1(t)
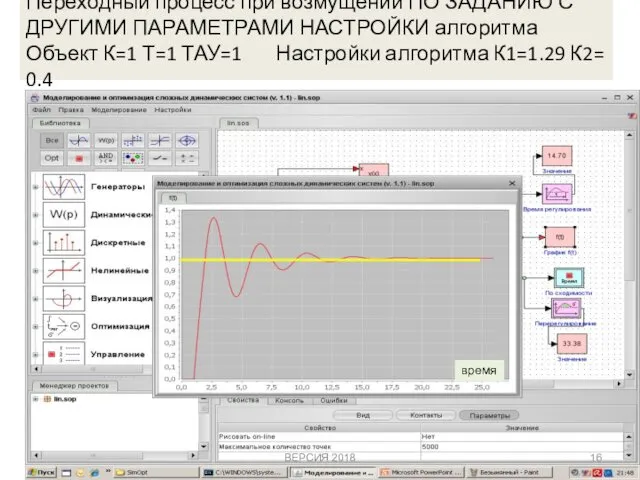
- 16. ВЕРСИЯ 2018 Переходный процесс при возмущении ПО ЗАДАНИЮ С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ алгоритма Объект К=1 Т=1
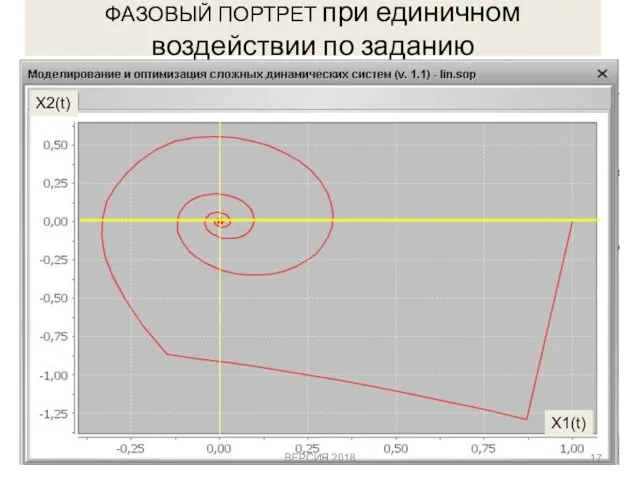
- 17. ВЕРСИЯ 2018 ФАЗОВЫЙ ПОРТРЕТ при единичном воздействии по заданию X2(t) X1(t)
- 18. Переходный процесс ПО ВОЗМУЩЕНИЮ F(t) С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ алгоритма управления К=1 Т=1 ТАУ=1 К1=1.29 К2=
- 19. ФАЗОВЫЙ ПОРТРЕТ при воздействии по возмущению ВЕРСИЯ 2018
- 20. ПО ВОЗМУЩЕНИЮ С ДРУГИМИ ПАРАМЕТРАМИ объекта управления и настройки алгоритма управления К=2 Т=2 ТАУ=2 К1=0.64 К2=
- 21. Фазовый портрет при воздействии ПО ВОЗМУЩЕНИЮ С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ объекта и алгоритма управления К=2 Т=2
- 22. Переходный процесс при единичном воздействии по ЗАДАНИЮ С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ объекта К=2 Т=2 ТАУ=2 и
- 23. Фазовый портрет при единичном воздействии ПО ЗАДАНИЮ С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ объекта К=2 Т=2 ТАУ=2 и
- 24. Основными свойством управляемой системы в целом будем считать свойство экспоненциальной устойчивости системы при параметрических возмущениях и
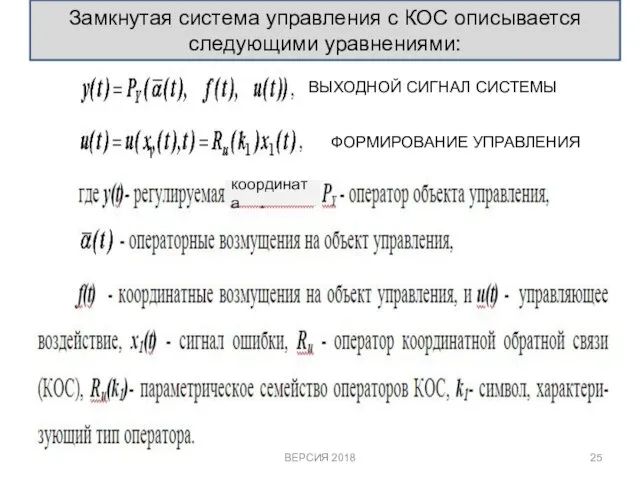
- 25. ВЕРСИЯ 2018 Замкнутая система управления с КОС описывается следующими уравнениями: координата 1 ВЫХОДНОЙ СИГНАЛ СИСТЕМЫ ФОРМИРОВАНИЕ
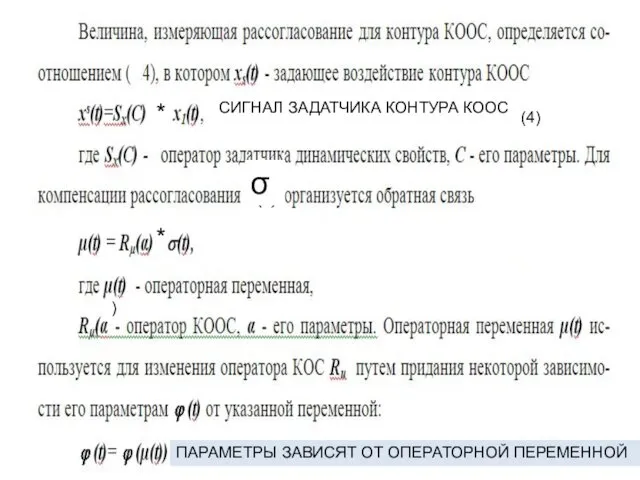
- 26. * * σ ВЕРСИЯ 2018 ) (4) СИГНАЛ ЗАДАТЧИКА КОНТУРА КООС ПАРАМЕТРЫ ЗАВИСЯТ ОТ ОПЕРАТОРНОЙ ПЕРЕМЕННОЙ
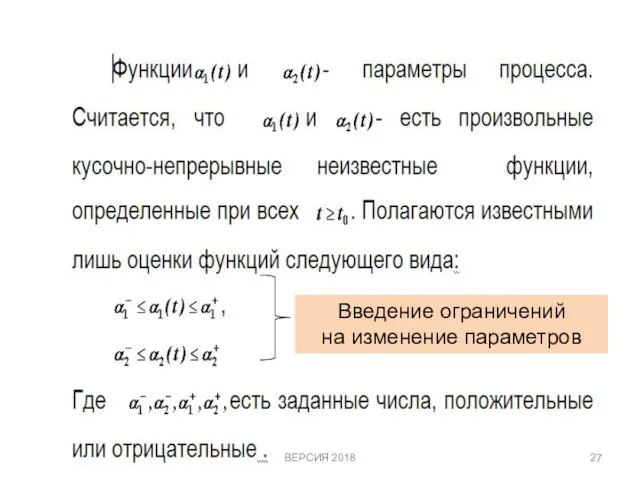
- 27. ВЕРСИЯ 2018 Введение ограничений на изменение параметров
- 28. На выбор алгоритмов управления решающие воздействие оказывают требования к формированию управляющего воздействия, как правило эти воздействия
- 29. Обобщенная схема Sμ - системы с КООС (рис.1.1), КООРДИНАТНО-ОПЕРАТОРНАЯ ОС ОПЕРАТОРНАЯ ПЕРЕМЕННАЯ ЗАДАТЧИК КОС ПАРАМЕТРИЧЕСКИЕ ВОЗМУЩЕНИЯ
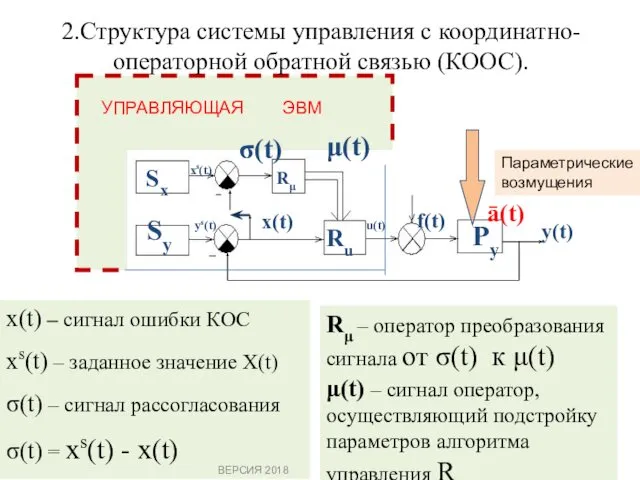
- 30. 2.Структура системы управления с координатно-операторной обратной связью (КООС). Sx Sy xs(t) ys(t) y(t) Rμ Ru μ(t)
- 31. Задачи системы управления. Если в параметрах объекта управления происходит параметрическое возмущение, то при отклонении ошибки Х1(t)
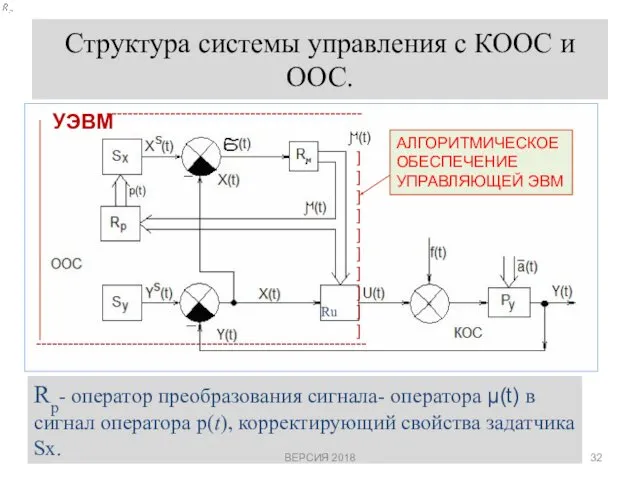
- 32. Структура системы управления с КООС и ООС. Ru Rp- оператор преобразования сигнала- оператора μ(t) в сигнал
- 33. 4.Сборка имитационной модели системы управления с КООС и ООС. ВЕРСИЯ 2018 ГЕНЕРАТОР Параметрических возмущений Сигнал оператор
- 34. Сборка имитационной модели содержит: В основном контуре два групповых элемента структуры (ГЭС), моделирующих соответственно алгоритм управления
- 36. Скачать презентацию
Содержание.
ВВЕДЕНИЕ
1. Постановка задач на имитационное моделирование и анализ динамических свойств параметрических
Содержание.
ВВЕДЕНИЕ
1. Постановка задач на имитационное моделирование и анализ динамических свойств параметрических
ВВЕДЕНИЕ
Суть подхода синтеза адаптивных систем, предложенного академиком С.В.Емельяновым состоит в систематическом
ВВЕДЕНИЕ
Суть подхода синтеза адаптивных систем, предложенного академиком С.В.Емельяновым состоит в систематическом
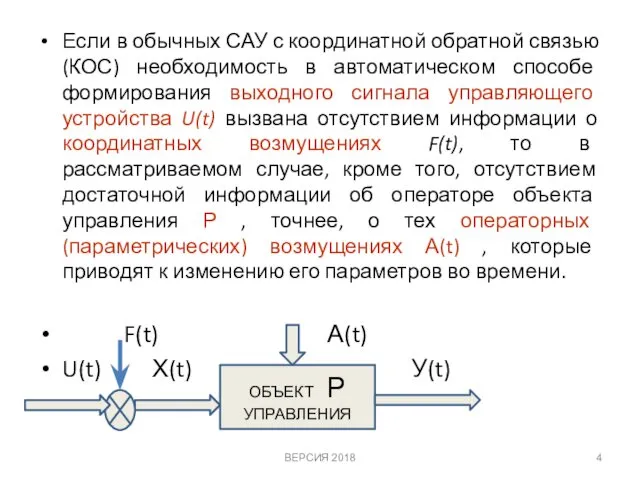
Если в обычных САУ с координатной обратной связью (КОС) необходимость в
Если в обычных САУ с координатной обратной связью (КОС) необходимость в
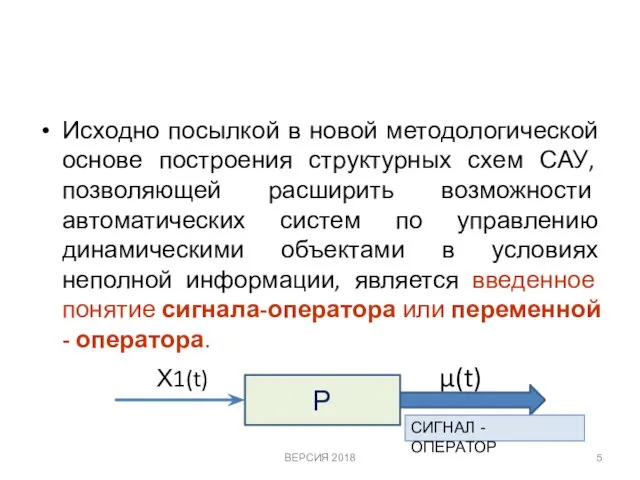
Исходно посылкой в новой методологической основе построения структурных схем САУ, позволяющей
Исходно посылкой в новой методологической основе построения структурных схем САУ, позволяющей
Переменная-оператор (сигнал-оператор) представляет собой какое-либо преобразование, осуществляемое над переменными-координатами.
Введенное различие
Переменная-оператор (сигнал-оператор) представляет собой какое-либо преобразование, осуществляемое над переменными-координатами.
Введенное различие
Двойственное толкование переменных состояния нелинейной динамической системы будем именовать принципом бинарности,
Двойственное толкование переменных состояния нелинейной динамической системы будем именовать принципом бинарности,
1. Постановка задачи на моделирование и анализ динамики параметрических систем уравнения.
Рассмотрим
1. Постановка задачи на моделирование и анализ динамики параметрических систем уравнения.
Рассмотрим
Функционально-алгоритмическая структура
Если координатно-операторной обратной связью дополнить структурную схему системы с КОС,
Функционально-алгоритмическая структура
Если координатно-операторной обратной связью дополнить структурную схему системы с КОС,

ЗАДАТЧИК
СИСТЕМЫ
Выходная координата
Управляющее воздействие
Параметрические возмущения
Координатно-операторная
обратная связь (КООС)
ЗАДАТЧИК КООС
1
ОШИБКА
ОБЪЕКТ УПРАВЛЕНИЯ
ВЕРСИЯ 2018
система
СИГНАЛ
ЗАДАТЧИК
СИСТЕМЫ
Выходная координата
Управляющее воздействие
Параметрические возмущения
Координатно-операторная
обратная связь (КООС)
ЗАДАТЧИК КООС
1
ОШИБКА
ОБЪЕКТ УПРАВЛЕНИЯ
ВЕРСИЯ 2018
система
СИГНАЛ
В этом случае система с КОС выступает в качестве звена координатно-операторного
В этом случае система с КОС выступает в качестве звена координатно-операторного
В терминах теории автоматического управления изменение параметров системы во времени можно
В терминах теории автоматического управления изменение параметров системы во времени можно
ВЕРСИЯ 2018
Стандартный анализ динамических свойств системы
КОНТУР КОС
ФАЗОВЫЙ ПОРТРЕТ
ГРАФИК
ФОРМИРОВАНИЯ
УПРАВЛЯЮЩЕГО
ВОЗДЕЙСТВИЯ
Объект управления
ВЕРСИЯ 2018
Стандартный анализ динамических свойств системы
КОНТУР КОС
ФАЗОВЫЙ ПОРТРЕТ
ГРАФИК
ФОРМИРОВАНИЯ
УПРАВЛЯЮЩЕГО
ВОЗДЕЙСТВИЯ
Объект управления

Единичное воздействие по ЗАДАНИЮ
К=1 Т=1 ТАУ=1 К1=1.6 К2= 0.125
ВЕРСИЯ 2018
Y(t)
t
Единичное воздействие по ЗАДАНИЮ
К=1 Т=1 ТАУ=1 К1=1.6 К2= 0.125
ВЕРСИЯ 2018
Y(t)
t
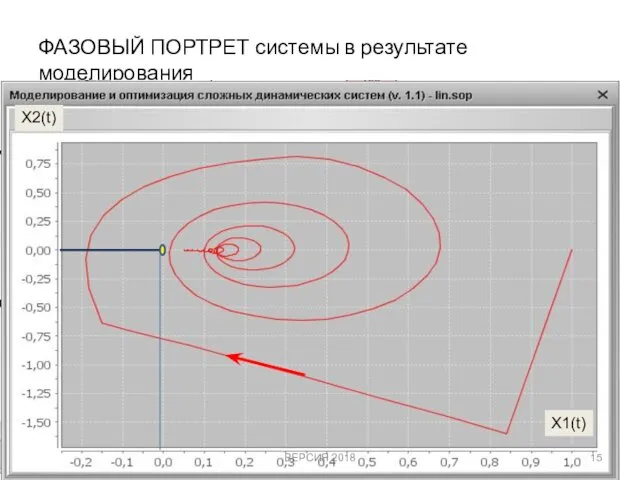
ФАЗОВЫЙ ПОРТРЕТ системы в результате моделирования
ВЕРСИЯ 2018
X2(t)
X1(t)
ФАЗОВЫЙ ПОРТРЕТ системы в результате моделирования
ВЕРСИЯ 2018
X2(t)
X1(t)
ВЕРСИЯ 2018
Переходный процесс при возмущении ПО ЗАДАНИЮ С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ
ВЕРСИЯ 2018
Переходный процесс при возмущении ПО ЗАДАНИЮ С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ
ВЕРСИЯ 2018
ФАЗОВЫЙ ПОРТРЕТ при единичном воздействии по заданию
X2(t)
X1(t)
ВЕРСИЯ 2018
ФАЗОВЫЙ ПОРТРЕТ при единичном воздействии по заданию
X2(t)
X1(t)
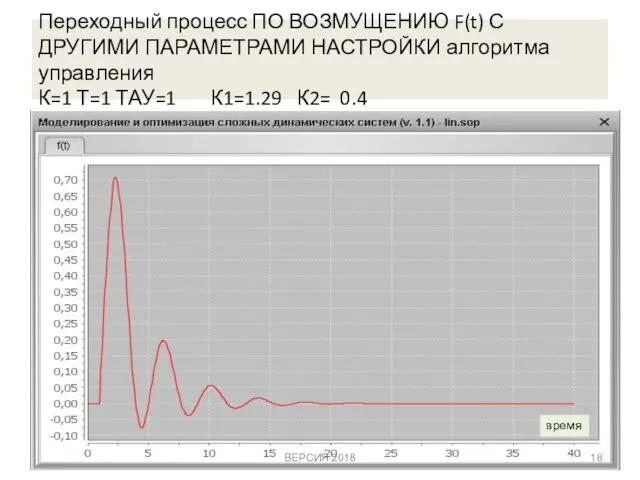
Переходный процесс ПО ВОЗМУЩЕНИЮ F(t) С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ алгоритма управления
К=1
Переходный процесс ПО ВОЗМУЩЕНИЮ F(t) С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ алгоритма управления К=1
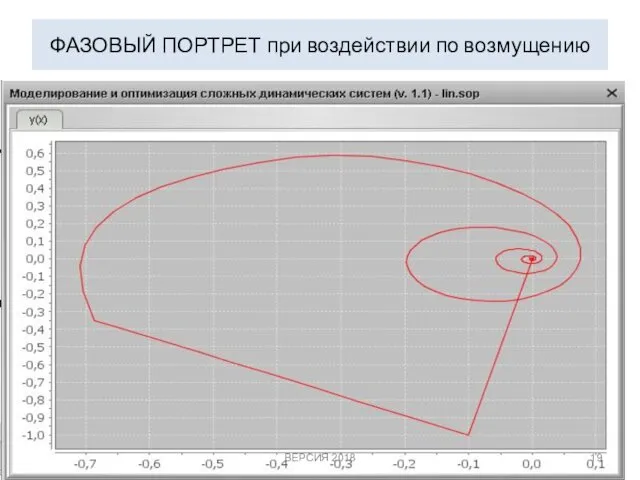
ФАЗОВЫЙ ПОРТРЕТ при воздействии по возмущению
ВЕРСИЯ 2018
ФАЗОВЫЙ ПОРТРЕТ при воздействии по возмущению
ВЕРСИЯ 2018
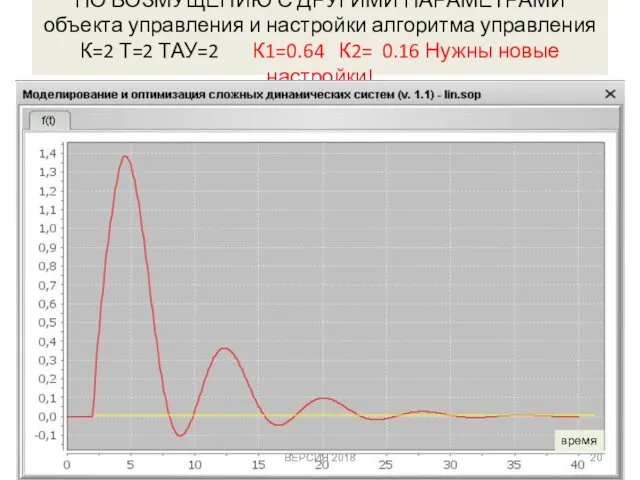
ПО ВОЗМУЩЕНИЮ С ДРУГИМИ ПАРАМЕТРАМИ объекта управления и настройки алгоритма управления
К=2
ПО ВОЗМУЩЕНИЮ С ДРУГИМИ ПАРАМЕТРАМИ объекта управления и настройки алгоритма управления К=2
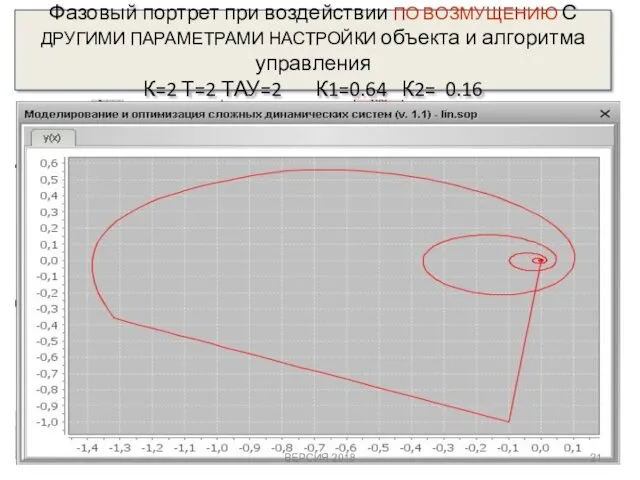
Фазовый портрет при воздействии ПО ВОЗМУЩЕНИЮ С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ объекта
Фазовый портрет при воздействии ПО ВОЗМУЩЕНИЮ С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ объекта
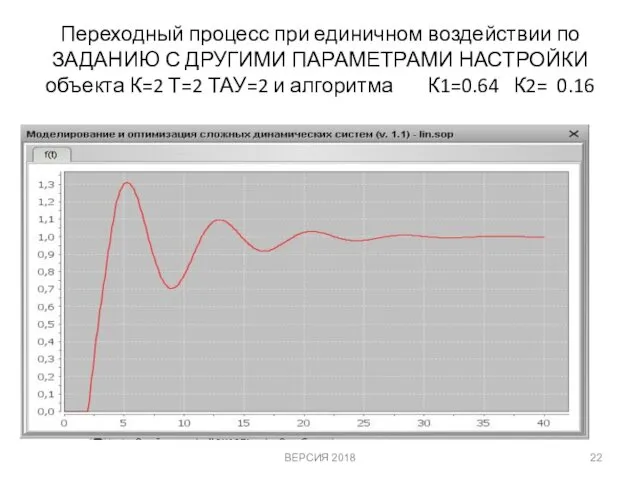
Переходный процесс при единичном воздействии по ЗАДАНИЮ С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ
объекта
Переходный процесс при единичном воздействии по ЗАДАНИЮ С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ объекта
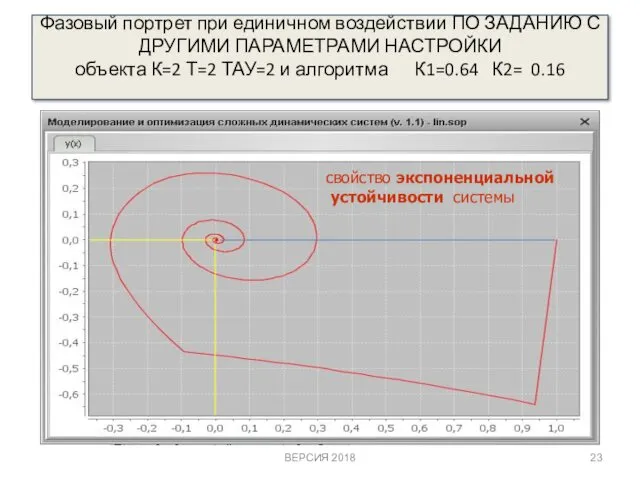
Фазовый портрет при единичном воздействии ПО ЗАДАНИЮ С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ
объекта
Фазовый портрет при единичном воздействии ПО ЗАДАНИЮ С ДРУГИМИ ПАРАМЕТРАМИ НАСТРОЙКИ объекта
Основными свойством управляемой системы в целом будем считать свойство экспоненциальной устойчивости
Основными свойством управляемой системы в целом будем считать свойство экспоненциальной устойчивости
ВЕРСИЯ 2018
Замкнутая система управления с КОС описывается следующими уравнениями:
координата
1
ВЫХОДНОЙ СИГНАЛ СИСТЕМЫ
ФОРМИРОВАНИЕ
ВЕРСИЯ 2018
Замкнутая система управления с КОС описывается следующими уравнениями:
координата
1
ВЫХОДНОЙ СИГНАЛ СИСТЕМЫ
ФОРМИРОВАНИЕ
*
*
σ
ВЕРСИЯ 2018
)
(4)
СИГНАЛ ЗАДАТЧИКА КОНТУРА КООС
ПАРАМЕТРЫ ЗАВИСЯТ ОТ ОПЕРАТОРНОЙ ПЕРЕМЕННОЙ
*
*
σ
ВЕРСИЯ 2018
)
(4)
СИГНАЛ ЗАДАТЧИКА КОНТУРА КООС
ПАРАМЕТРЫ ЗАВИСЯТ ОТ ОПЕРАТОРНОЙ ПЕРЕМЕННОЙ
ВЕРСИЯ 2018
Введение ограничений
на изменение параметров
ВЕРСИЯ 2018
Введение ограничений
на изменение параметров
На выбор алгоритмов управления решающие воздействие оказывают требования к формированию управляющего
На выбор алгоритмов управления решающие воздействие оказывают требования к формированию управляющего

Обобщенная схема Sμ - системы с КООС
(рис.1.1),
КООРДИНАТНО-ОПЕРАТОРНАЯ ОС
ОПЕРАТОРНАЯ
ПЕРЕМЕННАЯ
ЗАДАТЧИК
КОС
ПАРАМЕТРИЧЕСКИЕ
ВОЗМУЩЕНИЯ
ВЕРСИЯ 2018
ЗАДАТЧИК
КООС
оператор
Обобщенная схема Sμ - системы с КООС
(рис.1.1),
КООРДИНАТНО-ОПЕРАТОРНАЯ ОС
ОПЕРАТОРНАЯ
ПЕРЕМЕННАЯ
ЗАДАТЧИК
КОС
ПАРАМЕТРИЧЕСКИЕ
ВОЗМУЩЕНИЯ
ВЕРСИЯ 2018
ЗАДАТЧИК
КООС
оператор
2.Структура системы управления с координатно-операторной обратной связью (КООС).
Sx
Sy
xs(t)
ys(t)
y(t)
Rμ
Ru
μ(t)
x(t)
Py
f(t)
ā(t)
σ(t)
x(t) – сигнал
2.Структура системы управления с координатно-операторной обратной связью (КООС).
Sx
Sy
xs(t)
ys(t)
y(t)
Rμ
Ru
μ(t)
x(t)
Py
f(t)
ā(t)
σ(t)
x(t) – сигнал
Задачи системы управления.
Если в параметрах объекта управления происходит параметрическое возмущение, то
Задачи системы управления.
Если в параметрах объекта управления происходит параметрическое возмущение, то
Структура системы управления с КООС и ООС.
Ru
Rp- оператор преобразования сигнала- оператора
Структура системы управления с КООС и ООС.
Ru
Rp- оператор преобразования сигнала- оператора

4.Сборка имитационной модели системы управления с КООС и ООС.
ВЕРСИЯ 2018
ГЕНЕРАТОР
Параметрических
возмущений
Сигнал
оператор
УПРАВЛЯЮЩАЯ ЭВМ
ОБЪЕКТ
4.Сборка имитационной модели системы управления с КООС и ООС.
ВЕРСИЯ 2018
ГЕНЕРАТОР
Параметрических
возмущений
Сигнал
оператор
УПРАВЛЯЮЩАЯ ЭВМ
ОБЪЕКТ
Сборка имитационной модели содержит:
В основном контуре два групповых элемента структуры (ГЭС),
Сборка имитационной модели содержит:
В основном контуре два групповых элемента структуры (ГЭС),
 Беседа о толерантности
Беседа о толерантности Проект Дикий тюльпан№
Проект Дикий тюльпан№ Правовое обеспечение государственного управления – в пенсионной системе Российской Федерации
Правовое обеспечение государственного управления – в пенсионной системе Российской Федерации Дети в ТЖС. Как быть вожатому?
Дети в ТЖС. Как быть вожатому? Методы добычи нефти и газа. Способы эксплуатации скважин
Методы добычи нефти и газа. Способы эксплуатации скважин Белла Ахмадулина
Белла Ахмадулина Разработка технологической схемы получения асбеста 3-4 групп на базе руд Баженовского месторождения
Разработка технологической схемы получения асбеста 3-4 групп на базе руд Баженовского месторождения О правилах дорожного движения
О правилах дорожного движения ВКР: Изучение опыта и совершенствование деятельности экспертных учреждений МЧС России. Регламент защиты
ВКР: Изучение опыта и совершенствование деятельности экспертных учреждений МЧС России. Регламент защиты Васюганская равнина в Томской области
Васюганская равнина в Томской области Мультимедийная презентация Развитие фонематического слуха
Мультимедийная презентация Развитие фонематического слуха Кирово – Чепецкая центральная районная больница
Кирово – Чепецкая центральная районная больница Презентация Герои войны в моей семье учеников 2 а класса
Презентация Герои войны в моей семье учеников 2 а класса презентация Формирование единого образовательного пространства ДОО -семья Диск
презентация Формирование единого образовательного пространства ДОО -семья Диск Процессор. Упрощенная логическая схема одноядерного процессора
Процессор. Упрощенная логическая схема одноядерного процессора Интегрированный урок ИНФОРМАТИКА - НАУКА О ЖИВОЙ ПРИРОДЕ Сверхзадача: Воспитывать граждан, осознающих и принимающих свою долю ответственности за те изменения в окружающем мире, которые могут произойти в результате их деятельности. Межпредметные связи: ин
Интегрированный урок ИНФОРМАТИКА - НАУКА О ЖИВОЙ ПРИРОДЕ Сверхзадача: Воспитывать граждан, осознающих и принимающих свою долю ответственности за те изменения в окружающем мире, которые могут произойти в результате их деятельности. Межпредметные связи: ин Электрические цепи переменного тока. Лекция 1
Электрические цепи переменного тока. Лекция 1 Оксиды. Классификация. Номенклатура. Физические и химические свойства. Получение. Применение
Оксиды. Классификация. Номенклатура. Физические и химические свойства. Получение. Применение Технология термической обработки на металлургических заводах
Технология термической обработки на металлургических заводах Пінгвіноподібні. Характеристика Пінгвіноподібних
Пінгвіноподібні. Характеристика Пінгвіноподібних Тредиаковский Василий Кириллович (1703-1769)
Тредиаковский Василий Кириллович (1703-1769) Государство Великобритания
Государство Великобритания Tрансформаторы. Трехмерная модель трансформатора
Tрансформаторы. Трехмерная модель трансформатора презентация на тему Игра, как средство формирования здорового образа жизни
презентация на тему Игра, как средство формирования здорового образа жизни Скороговорки и чистоговорки Диск
Скороговорки и чистоговорки Диск Развитие у детей дошкольного возраста элементарного творчества в процессе экспериментирования с разнообразным художественным материалом
Развитие у детей дошкольного возраста элементарного творчества в процессе экспериментирования с разнообразным художественным материалом Публичная презентация учителя начальных классов Прокофьевой Марины Дмитриевны
Публичная презентация учителя начальных классов Прокофьевой Марины Дмитриевны Презентация для Олимпийских уроков Олимпийские игры- символика, ритуал, традиции
Презентация для Олимпийских уроков Олимпийские игры- символика, ритуал, традиции