- Общая характеристика радиолокационной системы РТВ

Содержание
- 2. Вопросы лекции 1. Состав и назначение аппаратуры РЛС обнаружения воздушных целей. 2.Взаимодействие элементов РЛС обнаружения воздушных
- 3. Учебная литература: Основы построения радиолокационных станций радиотехнических войск: учебник /В.Н. Тяпкин, А.Н. Фомин, Е.Н.Гарин [и др.];
- 4. Вопрос 1. Состав и назначение аппаратуры РЛС обнаружения воздушных целей радиопередающая система; фидерная (волноводная) система; антенная
- 5. Радиопередающая система предназначена для формирования высокочастотных сигналов большой мощности с заданным законом модуляции (зондирующих сигналов). В
- 6. Антенная система предназначена для излучения зондирующих сигналов (формирования диаграммы направленности на передачу) и приема отраженных и
- 7. Радиоприемная система предназначена для усиления, частотной селекции принимаемых отраженных сигналов и сигналов помех и преобразования их
- 8. При использовании в качестве зондирующих сигналов со сложным законом модуляции в составе РПрУ (на выходе УПЧ)
- 9. При использовании в качестве зондирующих сигналов со сложным законом модуляции в составе РПрУ (на выходе УПЧ)
- 10. Система автоматической подстройки частоты (АПЧ) предназначена для подстроки частоты сигнала на выходе смесителя РПрУ (разностной частоты)
- 11. Аппаратура защиты от АШП предназначена для защиты РЛС от активных шумовых помех большой длительности. Принцип работы
- 12. Аппаратура защиты от пассивных помех предназначена для защиты РЛС от сигналов, отраженных от неподвижных местных предметов
- 13. Аппаратура пеленгации позволяет определять пеленги на постановщики активных шумовых помех. Аппаратура подавления бокового ответа (ПБО) позволяет
- 14. Индикаторная система предназначена для отображения радиолокационной информации (РЛИ) вокруг точки стояния РЛС и различной вспомогательной информации.
- 15. Система синхронизации обеспечивает согласованную работу всех систем и устройств РЛС по времени. Система вырабатывает временную последовательность
- 16. Система синхронной передачи угла поворота (ССП) обеспечивает формирование разверток на экранах индикаторных устройств РЛС в соответствии
- 17. Тренажно-имитационная аппаратура предназначена для проверки работоспособности и настройки основных систем и устройств РЛС, а также для
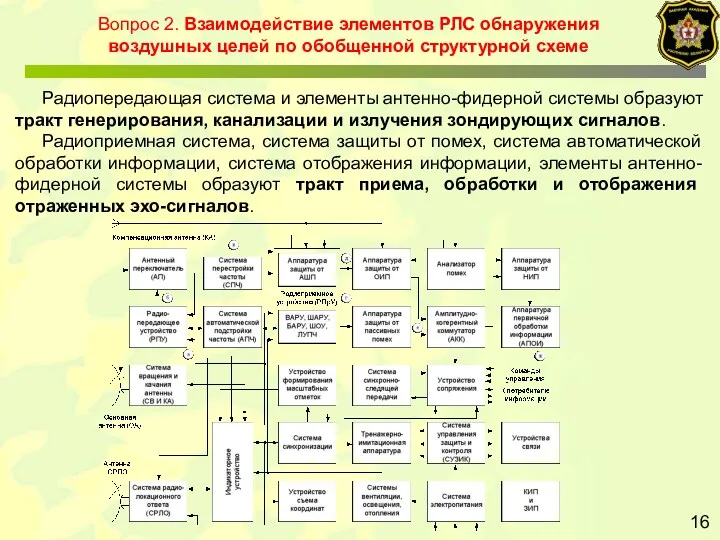
- 18. Вопрос 2. Взаимодействие элементов РЛС обнаружения воздушных целей по обобщенной структурной схеме Радиопередающая система и элементы
- 19. 3 Тракт генерирования и излучения (канализации) зондирующих сигналов. По приходу импульса запуска с системы синхронизации, радиопередающее
- 20. 3 Для эффективной работы РЛС в различных условиях помеховой обстановки в приемном устройстве предусмотрено использование различных
- 21. 3 Система принятия решения о наличии цели (индикаторное устройство). Задача отображения воздушной обстановки (комплексного эхо-сигнала) в
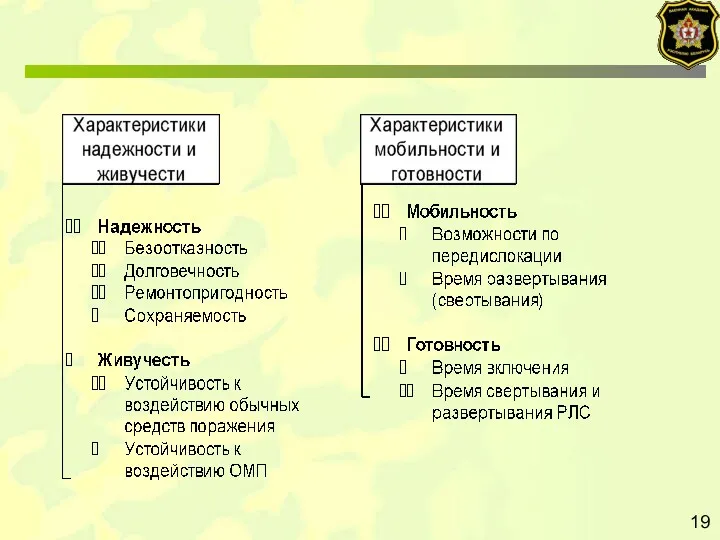
- 22. Дополнительно .Анализ влияния технических характеристик РЛС на ее боевые возможности Технические характеристики РЛС - это совокупность
- 23. 4
- 24. Использование несущей частоты в метровом и дециметровом диапазоне позволяет: исключить потери мощности электромагнитных колебаний при их
- 25. Использование высокой несущей частоты в сантиметровом и дециметровом диапазонах волн позволяет: уменьшить размеры антенны и упростить
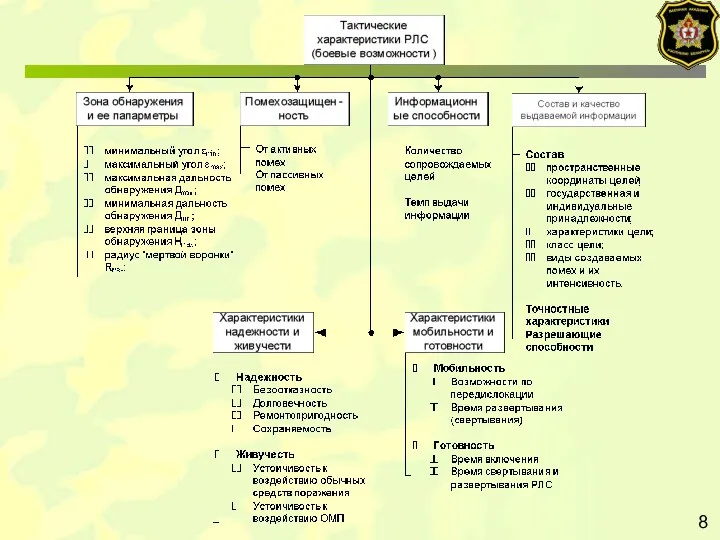
- 26. зона обнаружения и ее параметры; состав выдаваемой радиолокационной информации; точностные характеристики по измеряемым координатам (точность измерения
- 27. 8
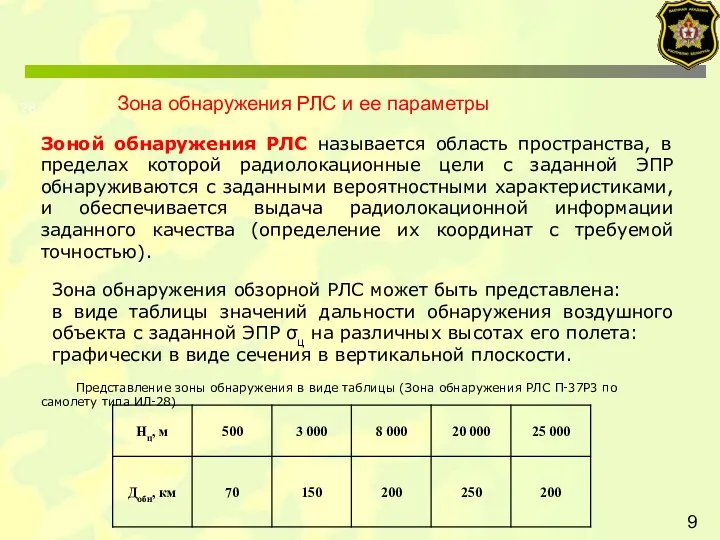
- 28. Зона обнаружения РЛС и ее параметры Зоной обнаружения РЛС называется область пространства, в пределах которой радиолокационные
- 29. Сечение зоны обнаружения РЛС в вертикальной плоскости 10
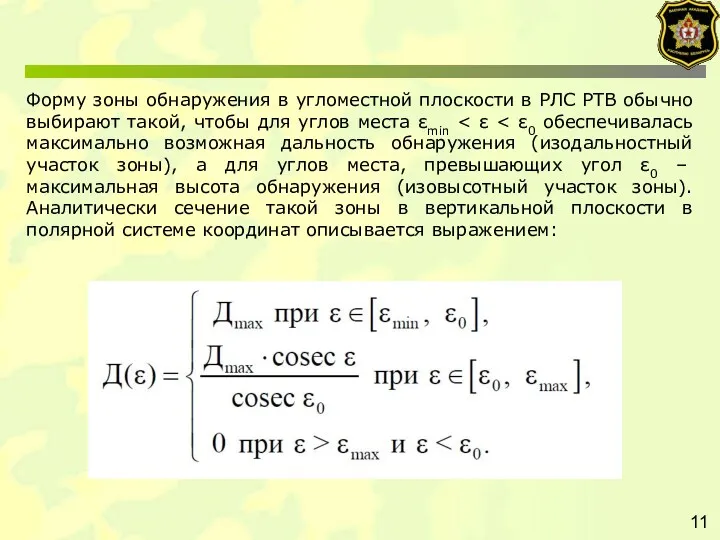
- 30. Форму зоны обнаружения в угломестной плоскости в РЛС РТВ обычно выбирают такой, чтобы для углов места
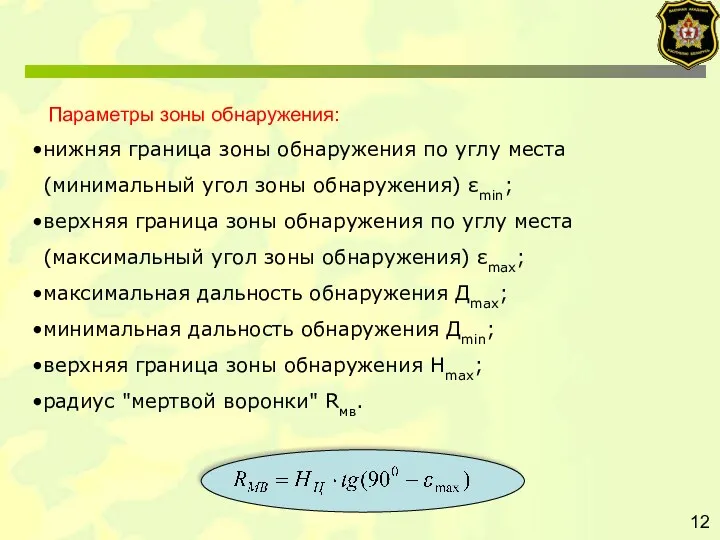
- 31. Параметры зоны обнаружения: нижняя граница зоны обнаружения по углу места (минимальный угол зоны обнаружения) εmin; верхняя
- 32. Состав радиолокационной информации: пространственные координаты целей; государственную ("свой", "чужой") и индивидуальную (индивидуальный номер) принадлежность; характеристику цели
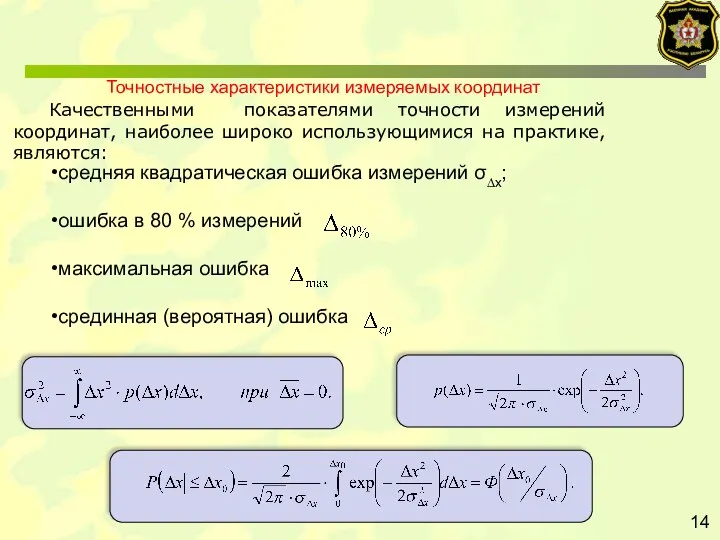
- 33. средняя квадратическая ошибка измерений σ∆x; ошибка в 80 % измерений максимальная ошибка срединная (вероятная) ошибка Точностные
- 34. Определение максимальной ошибки измерений 15
- 35. Разрешающая способность – это способность РЛС раздельно воспроизводить на экране индикатора две близко расположенные цели. 16
- 36. Разрешающая способность по дальности – это минимальное расстояние между целями, имеющими одинаковые азимут и высоту, при
- 37. Под помехозащищенностью РЛС понимают способность РЛС сохранять свои тактико-технические характеристики (данные) при воздействии радиопомех различного вида.
- 38. 19
- 40. Скачать презентацию
Вопросы лекции
1. Состав и назначение аппаратуры РЛС обнаружения воздушных целей.
2.Взаимодействие элементов
Вопросы лекции
1. Состав и назначение аппаратуры РЛС обнаружения воздушных целей.
2.Взаимодействие элементов
Учебная литература:
Основы построения радиолокационных станций радиотехнических войск: учебник /В.Н. Тяпкин,
Учебная литература:
Основы построения радиолокационных станций радиотехнических войск: учебник /В.Н. Тяпкин,
Вопрос 1. Состав и назначение аппаратуры РЛС обнаружения воздушных целей
радиопередающая
Вопрос 1. Состав и назначение аппаратуры РЛС обнаружения воздушных целей
радиопередающая
Радиопередающая система предназначена для формирования высокочастотных сигналов большой мощности с заданным
Радиопередающая система предназначена для формирования высокочастотных сигналов большой мощности с заданным
Антенная система предназначена для излучения зондирующих сигналов (формирования диаграммы направленности на
Антенная система предназначена для излучения зондирующих сигналов (формирования диаграммы направленности на
Радиоприемная система предназначена для усиления, частотной селекции принимаемых отраженных сигналов и
Радиоприемная система предназначена для усиления, частотной селекции принимаемых отраженных сигналов и
При использовании в качестве зондирующих сигналов со сложным законом модуляции в
При использовании в качестве зондирующих сигналов со сложным законом модуляции в
При использовании в качестве зондирующих сигналов со сложным законом модуляции в
При использовании в качестве зондирующих сигналов со сложным законом модуляции в
Система автоматической подстройки частоты (АПЧ) предназначена для подстроки частоты сигнала на
Система автоматической подстройки частоты (АПЧ) предназначена для подстроки частоты сигнала на
Аппаратура защиты от АШП предназначена для защиты РЛС от активных шумовых
Аппаратура защиты от АШП предназначена для защиты РЛС от активных шумовых
Аппаратура защиты от пассивных помех предназначена для защиты РЛС от сигналов,
Аппаратура защиты от пассивных помех предназначена для защиты РЛС от сигналов,
Аппаратура пеленгации позволяет определять пеленги на постановщики активных шумовых помех.
Аппаратура подавления
Аппаратура пеленгации позволяет определять пеленги на постановщики активных шумовых помех.
Аппаратура подавления
Индикаторная система предназначена для отображения радиолокационной информации (РЛИ) вокруг точки стояния
Индикаторная система предназначена для отображения радиолокационной информации (РЛИ) вокруг точки стояния
Система синхронизации обеспечивает согласованную работу всех систем и устройств РЛС по
Система синхронизации обеспечивает согласованную работу всех систем и устройств РЛС по
Система синхронной передачи угла поворота (ССП) обеспечивает формирование разверток на экранах
Система синхронной передачи угла поворота (ССП) обеспечивает формирование разверток на экранах
Тренажно-имитационная аппаратура предназначена для проверки работоспособности и настройки основных систем и
Тренажно-имитационная аппаратура предназначена для проверки работоспособности и настройки основных систем и
Вопрос 2. Взаимодействие элементов РЛС обнаружения воздушных целей по обобщенной структурной
Вопрос 2. Взаимодействие элементов РЛС обнаружения воздушных целей по обобщенной структурной
3
Тракт генерирования и излучения (канализации) зондирующих сигналов. По приходу импульса запуска
3
Тракт генерирования и излучения (канализации) зондирующих сигналов. По приходу импульса запуска
3
Для эффективной работы РЛС в различных условиях помеховой обстановки в приемном
3
Для эффективной работы РЛС в различных условиях помеховой обстановки в приемном
3
Система принятия решения о наличии цели (индикаторное устройство).
Задача отображения воздушной обстановки
3
Система принятия решения о наличии цели (индикаторное устройство).
Задача отображения воздушной обстановки
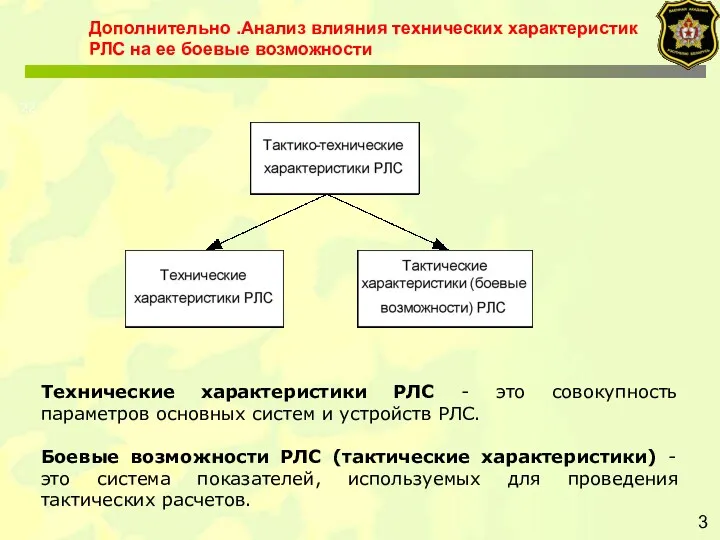
Дополнительно .Анализ влияния технических характеристик РЛС на ее боевые возможности
Технические характеристики
Дополнительно .Анализ влияния технических характеристик РЛС на ее боевые возможности
Технические характеристики
4
4
Использование несущей частоты в метровом и дециметровом диапазоне позволяет:
исключить потери мощности
Использование несущей частоты в метровом и дециметровом диапазоне позволяет:
исключить потери мощности
Использование высокой несущей частоты в сантиметровом и дециметровом диапазонах волн позволяет:
уменьшить
Использование высокой несущей частоты в сантиметровом и дециметровом диапазонах волн позволяет:
уменьшить
зона обнаружения и ее параметры;
состав выдаваемой радиолокационной информации;
точностные характеристики по измеряемым
зона обнаружения и ее параметры;
состав выдаваемой радиолокационной информации;
точностные характеристики по измеряемым
8
8
Зона обнаружения РЛС и ее параметры
Зоной обнаружения РЛС называется область пространства,
Зона обнаружения РЛС и ее параметры
Зоной обнаружения РЛС называется область пространства,
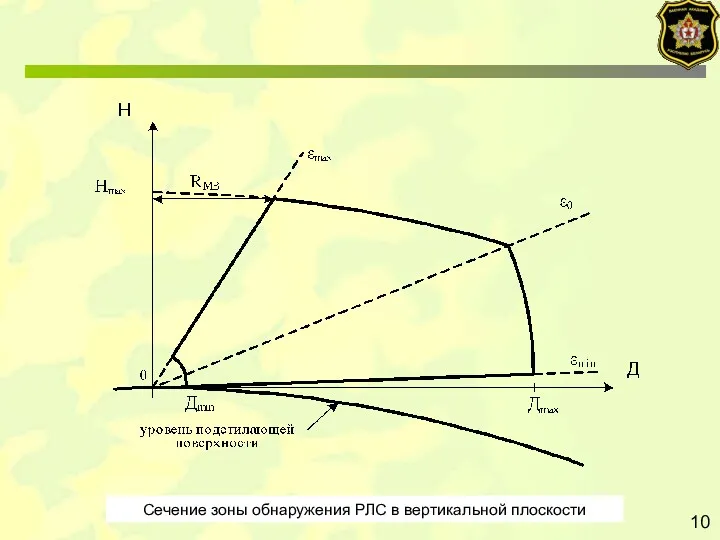
Сечение зоны обнаружения РЛС в вертикальной плоскости
10
Сечение зоны обнаружения РЛС в вертикальной плоскости
10
Форму зоны обнаружения в угломестной плоскости в РЛС РТВ обычно выбирают
Форму зоны обнаружения в угломестной плоскости в РЛС РТВ обычно выбирают
Параметры зоны обнаружения:
нижняя граница зоны обнаружения по углу места (минимальный угол
Параметры зоны обнаружения:
нижняя граница зоны обнаружения по углу места (минимальный угол
Состав радиолокационной информации:
пространственные координаты целей;
государственную ("свой", "чужой") и индивидуальную (индивидуальный номер)
Состав радиолокационной информации:
пространственные координаты целей;
государственную ("свой", "чужой") и индивидуальную (индивидуальный номер)
средняя квадратическая ошибка измерений σ∆x;
ошибка в 80 % измерений
максимальная ошибка
срединная (вероятная)
средняя квадратическая ошибка измерений σ∆x;
ошибка в 80 % измерений
максимальная ошибка
срединная (вероятная)
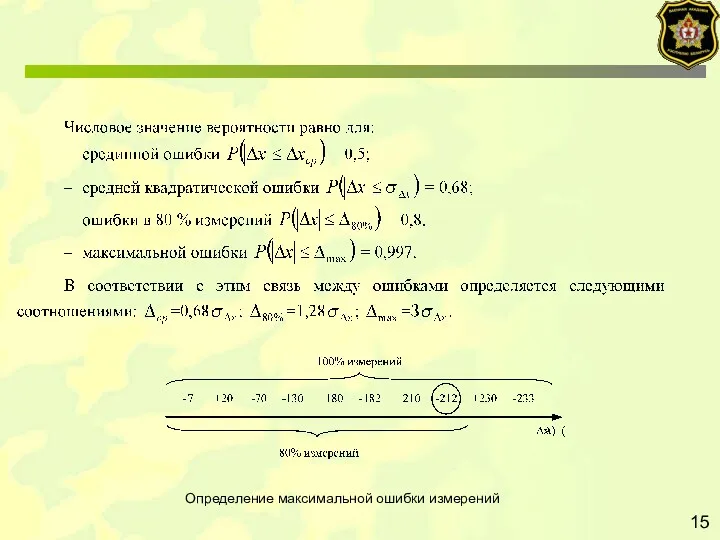
Определение максимальной ошибки измерений
15
Определение максимальной ошибки измерений
15
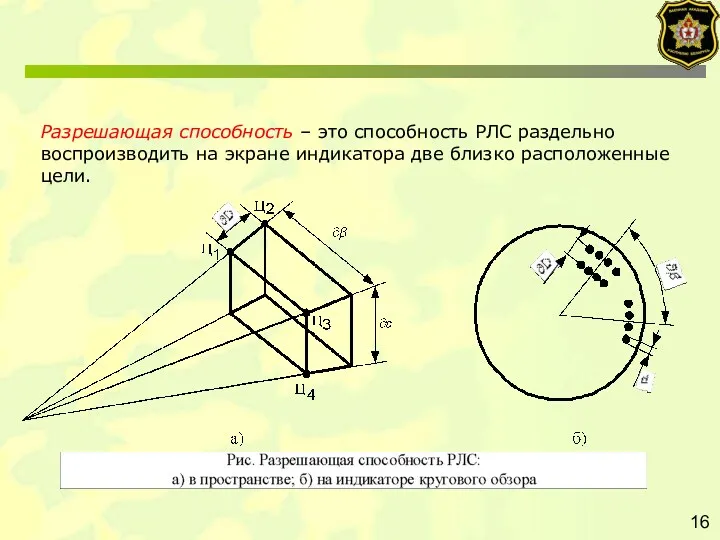
Разрешающая способность – это способность РЛС раздельно воспроизводить на экране индикатора
Разрешающая способность – это способность РЛС раздельно воспроизводить на экране индикатора
Разрешающая способность по дальности – это минимальное расстояние между целями, имеющими
Разрешающая способность по дальности – это минимальное расстояние между целями, имеющими
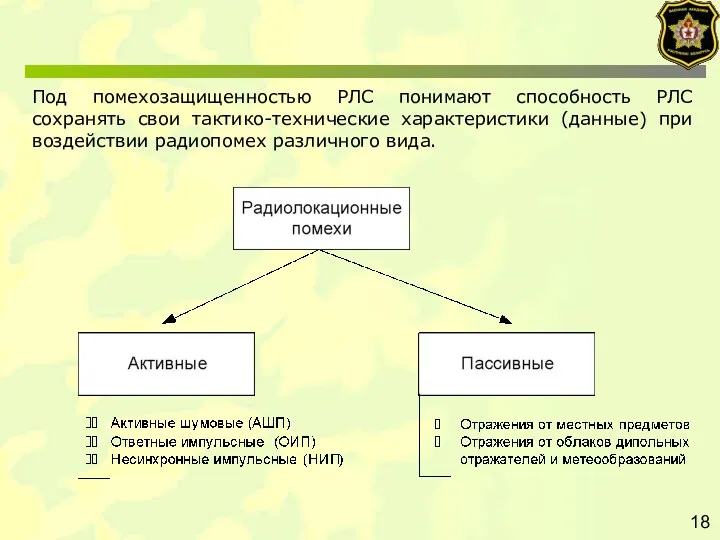
Под помехозащищенностью РЛС понимают способность РЛС сохранять свои тактико-технические характеристики (данные)
Под помехозащищенностью РЛС понимают способность РЛС сохранять свои тактико-технические характеристики (данные)
19
19
 Артистические профессии средневековья
Артистические профессии средневековья Анатомия органа зрения
Анатомия органа зрения Живопись глазами химика
Живопись глазами химика Клинико-анатомические особенности строения зубочелюстной системы
Клинико-анатомические особенности строения зубочелюстной системы Сотрудничество - путь к саморазвитию личности
Сотрудничество - путь к саморазвитию личности Система крови. Гематология
Система крови. Гематология История государства и права Древнего Китая
История государства и права Древнего Китая Вежливое поведение детей
Вежливое поведение детей spain-information-powerpoint_ver_3
spain-information-powerpoint_ver_3 Подготовка к промежуточной аттестации
Подготовка к промежуточной аттестации Тува в годы Великой Отечетсвенной войны.
Тува в годы Великой Отечетсвенной войны. Тренажер развития внимания для 1-4 классов
Тренажер развития внимания для 1-4 классов Obsledovanie_slogovoy_struktury_slova_1
Obsledovanie_slogovoy_struktury_slova_1 Кафедра измерительных информационных технологий
Кафедра измерительных информационных технологий Пожарная безопасность
Пожарная безопасность Лёгкий защитный костюм Л-1
Лёгкий защитный костюм Л-1 Занятие с элементами тренинга для родителей детей младших групп. Тема: Семья как основа развития личности дошкольника. Презентация.
Занятие с элементами тренинга для родителей детей младших групп. Тема: Семья как основа развития личности дошкольника. Презентация. Составление проектов бюджетов. Полномочия финансовых органов на разных этапах составления бюджетов
Составление проектов бюджетов. Полномочия финансовых органов на разных этапах составления бюджетов Правление Петра I Великого 1682 – 1725
Правление Петра I Великого 1682 – 1725 Зудящие дерматозы
Зудящие дерматозы Технологическая карта урока
Технологическая карта урока Презентация Трагедия Беслана. 10 лет спустя.
Презентация Трагедия Беслана. 10 лет спустя. Органическая химия в задачах. Определение формулы вещества по известной общей формуле и массовой доли одного из элементов.
Органическая химия в задачах. Определение формулы вещества по известной общей формуле и массовой доли одного из элементов. Современные бетоны и технологии. Эра добавок
Современные бетоны и технологии. Эра добавок Презентация проекта Знакомство ребенка с англоязычными странами в ДОУ, используя героев мультипликации
Презентация проекта Знакомство ребенка с англоязычными странами в ДОУ, используя героев мультипликации Растения озёр
Растения озёр Стационар-замещающие технологии в современных условиях
Стационар-замещающие технологии в современных условиях Оценка образовательных результатов
Оценка образовательных результатов