- Общие понятия о навигации ВС. Основные навигационные параметры и методы их определения

Содержание
- 4. Тема 3. Общие сведения о содержании подготовки специалиста Лекция 10 (2 часа) Изучаемые вопросы: Общие понятия
- 5. 10.1. Общие понятия о навигации Навигация - это наука о методах и средствах, обеспечивающих вождение подвижных
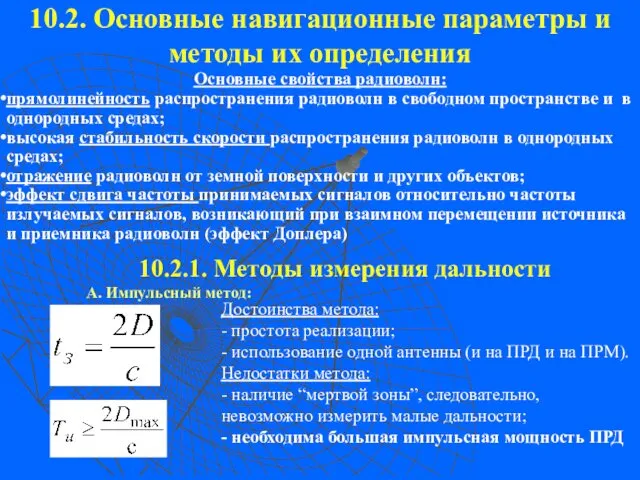
- 6. 10.2. Основные навигационные параметры и методы их определения Основные свойства радиоволн: прямолинейность распространения радиоволн в свободном
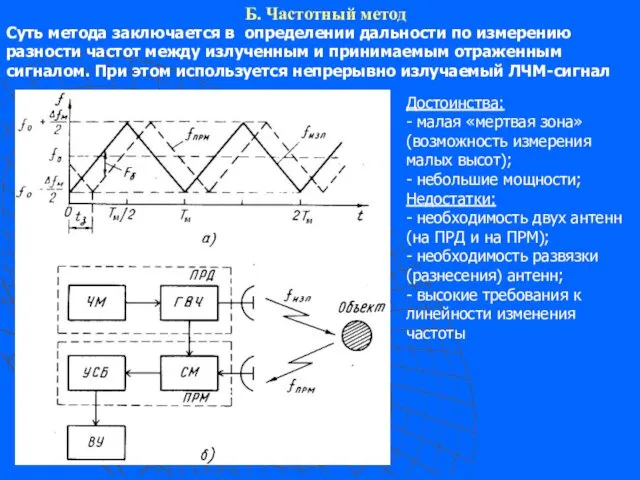
- 7. Б. Частотный метод Суть метода заключается в определении дальности по измерению разности частот между излученным и
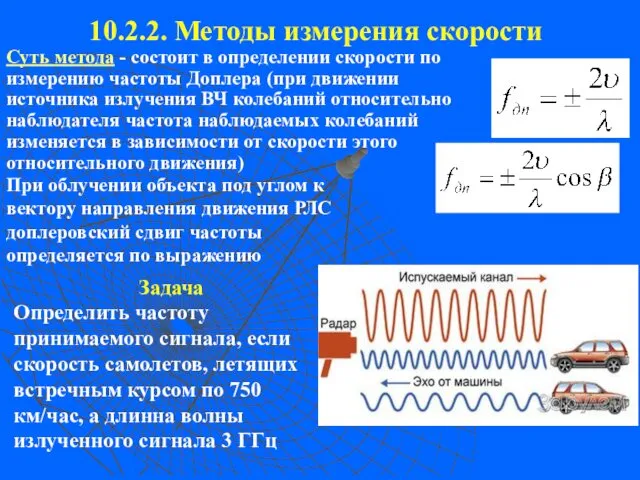
- 8. 10.2.2. Методы измерения скорости Суть метода - состоит в определении скорости по измерению частоты Доплера (при
- 9. 10.2.3. Основные методы определения местоположения ВС
- 10. 10.2.4. Методы измерения направления (угловых координат)
- 11. 10.3. Автономные и неавтономные радионавигационные системы
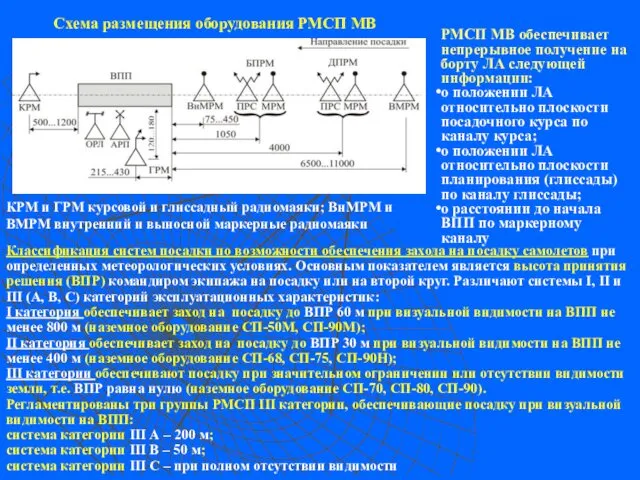
- 12. 10.4. Наземное радионавигационное оборудование. Радиотехнические системы посадки Схема размещения оборудования системы посадки (ОСП) Упрощенные системы посадки
- 13. Радиолокатор посадочный РП-5Г Радиолокационная система посадки РСП - 6 Диспетчерский радиолокатор Радиолокационные системы посадки позволяют оператору
- 14. Радиомаячные системы посадки Курсовой радиомаяк системы посадки СП-200 Глиссадный радиомаяк системы СП-80 Лазерная система посадки
- 16. Задание на самостоятельную работу Прочитав конспект лекций ответить на следующие вопросы: Дайте определение навигации. Какие навигационные
- 18. Скачать презентацию


Тема 3. Общие сведения о содержании подготовки специалиста
Лекция 10 (2 часа)
Тема 3. Общие сведения о содержании подготовки специалиста
Лекция 10 (2 часа)
10.1. Общие понятия о навигации
Навигация - это наука о методах и
10.1. Общие понятия о навигации
Навигация - это наука о методах и
10.2. Основные навигационные параметры и методы их определения
Основные свойства радиоволн:
прямолинейность распространения
10.2. Основные навигационные параметры и методы их определения
Основные свойства радиоволн:
прямолинейность распространения
Б. Частотный метод
Суть метода заключается в определении дальности по измерению разности
Б. Частотный метод
Суть метода заключается в определении дальности по измерению разности
10.2.2. Методы измерения скорости
Суть метода - состоит в определении скорости по
10.2.2. Методы измерения скорости
Суть метода - состоит в определении скорости по

10.2.3. Основные методы определения
местоположения ВС
10.2.3. Основные методы определения
местоположения ВС
10.2.4. Методы измерения направления
(угловых координат)
10.2.4. Методы измерения направления
(угловых координат)

10.3. Автономные и неавтономные радионавигационные системы
10.3. Автономные и неавтономные радионавигационные системы

10.4. Наземное радионавигационное оборудование. Радиотехнические системы посадки
Схема размещения оборудования системы посадки
10.4. Наземное радионавигационное оборудование. Радиотехнические системы посадки
Схема размещения оборудования системы посадки

Радиолокатор посадочный РП-5Г
Радиолокационная система посадки РСП - 6
Диспетчерский радиолокатор
Радиолокационные системы посадки
Радиолокатор посадочный РП-5Г
Радиолокационная система посадки РСП - 6
Диспетчерский радиолокатор
Радиолокационные системы посадки

Радиомаячные системы посадки
Курсовой радиомаяк
системы посадки СП-200
Глиссадный радиомаяк системы
СП-80
Лазерная
Радиомаячные системы посадки
Курсовой радиомаяк
системы посадки СП-200
Глиссадный радиомаяк системы
СП-80
Лазерная
Задание на самостоятельную работу
Прочитав конспект лекций ответить на следующие вопросы:
Дайте
Задание на самостоятельную работу
Прочитав конспект лекций ответить на следующие вопросы:
Дайте
 Игра-презентация Возьми предметы со звуком Ш
Игра-презентация Возьми предметы со звуком Ш Специальные автоматы для дуговой сварки
Специальные автоматы для дуговой сварки Знаки препинания в конце предложения
Знаки препинания в конце предложения Вред курения. Что делает курение с легкими
Вред курения. Что делает курение с легкими Склеродермия және дерматомиозит
Склеродермия және дерматомиозит Александр Ярославич Невский 1220 —1263 годы
Александр Ярославич Невский 1220 —1263 годы Классный час Ленинский район Саратова
Классный час Ленинский район Саратова Onegin
Onegin Презентация Такие разные деды Морозы
Презентация Такие разные деды Морозы Альфред Сислей
Альфред Сислей Сперанский Георгий Несторович
Сперанский Георгий Несторович Свойства корня n-ой степени. 11 класс
Свойства корня n-ой степени. 11 класс Система работы учителя предметника в интерактивной информационной среде Moodle учителя химии ГБОУ ЦО Школа здоровья №1941 Шушляпиной Юлии Петровны
Система работы учителя предметника в интерактивной информационной среде Moodle учителя химии ГБОУ ЦО Школа здоровья №1941 Шушляпиной Юлии Петровны Радиометрия и ядерная геофизика. (Лекция 8)
Радиометрия и ядерная геофизика. (Лекция 8) Имидж учителя
Имидж учителя Зачем нужны самолёты
Зачем нужны самолёты Пермский край-лесной край.
Пермский край-лесной край. Фенол. 10 класс
Фенол. 10 класс Химия. Вещества. Занятие 1
Химия. Вещества. Занятие 1 Интернеттен ақпарат іздеу
Интернеттен ақпарат іздеу Стороны в гражданском процессе
Стороны в гражданском процессе Презентация по технологии
Презентация по технологии Hello everybody
Hello everybody Этика педагога
Этика педагога Искусство аниме
Искусство аниме Личность в психологии. Категория деятельности в психологии. Структура деятельности. Общение как категория психологии. (Лекция 3)
Личность в психологии. Категория деятельности в психологии. Структура деятельности. Общение как категория психологии. (Лекция 3) Природоведение, 5 класс
Природоведение, 5 класс Merchandise marketing
Merchandise marketing