- Однокристальные микро-ЭВМ

Содержание
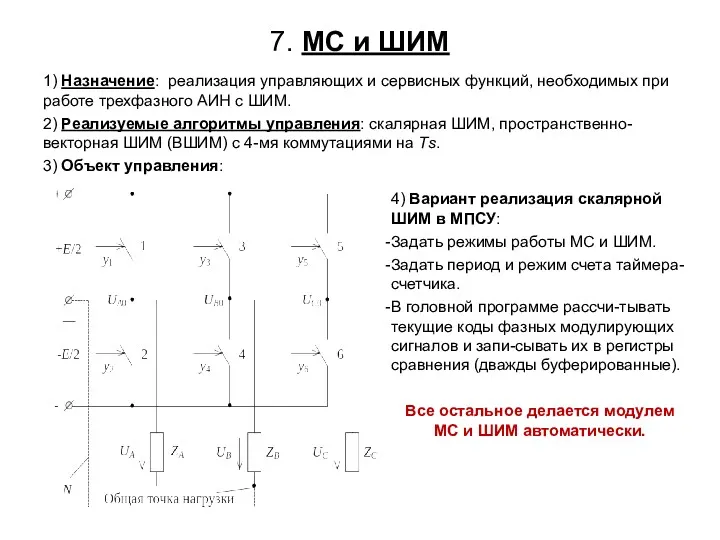
- 2. 7. МС и ШИМ 4) Вариант реализация скалярной ШИМ в МПСУ: Задать режимы работы МС и
- 3. где Т1, Т2, Т0, Т7 - время существования одноименных векторов. Векторы состояния: 000 − V0 и
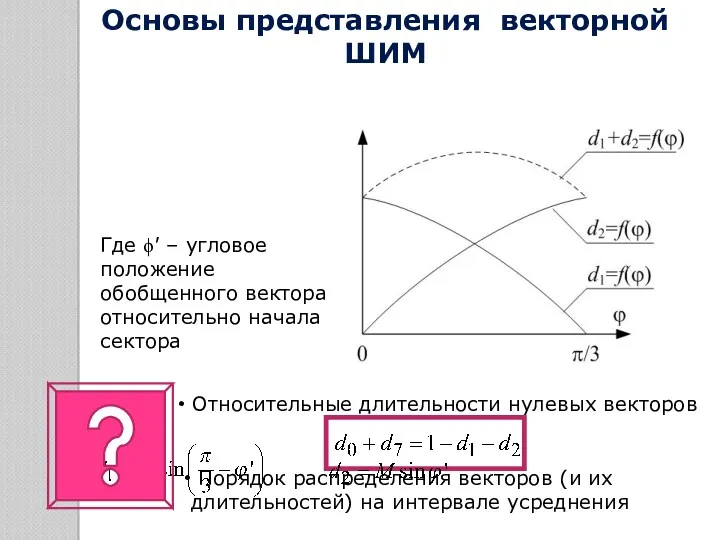
- 4. Порядок распределения векторов (и их длительностей) на интервале усреднения Где ϕ' – угловое положение обобщенного вектора
- 5. Порядок распределения векторов (и их длительностей) на интервале усреднения на Ts располагается только один нулевой вектор
- 6. 6) Вариант реализация векторной ШИМ в МПСУ: Задать режимы работы МС и ШИМ. Задать период и
- 7. 7) ПЛМ МС и ШИМ: - COMCONx – регистр управления сравнения МнСА/В; - ACTRx – регистр
- 8. D15 – CENABLE – бит разрешение сравнения: = 0/1 ⇒ работа сравнения запрещена/разрешена. D14-D13 – CLD1,
- 9. D9 – FCMPOE – бит разрешения выходов МСиШИМ. Бит активен, когда EXTCONA(0)=0, иначе – резерв. В
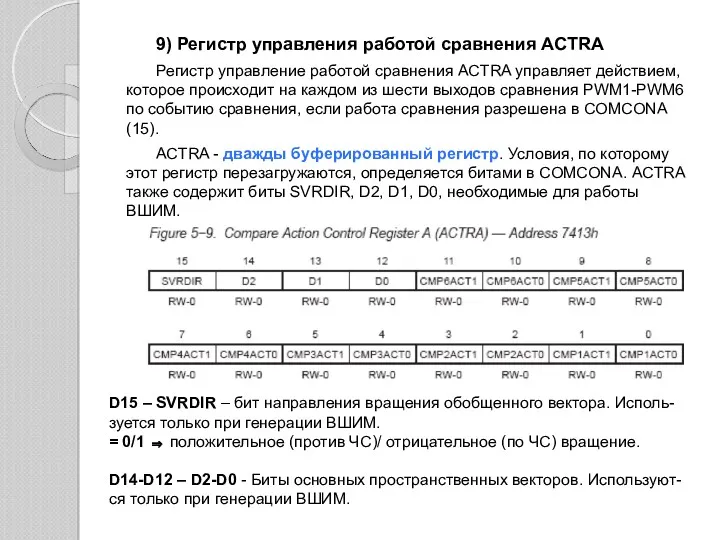
- 10. 9) Регистр управления работой сравнения ACTRА Регистр управление работой сравнения ACTRA управляет действием, которое происходит на
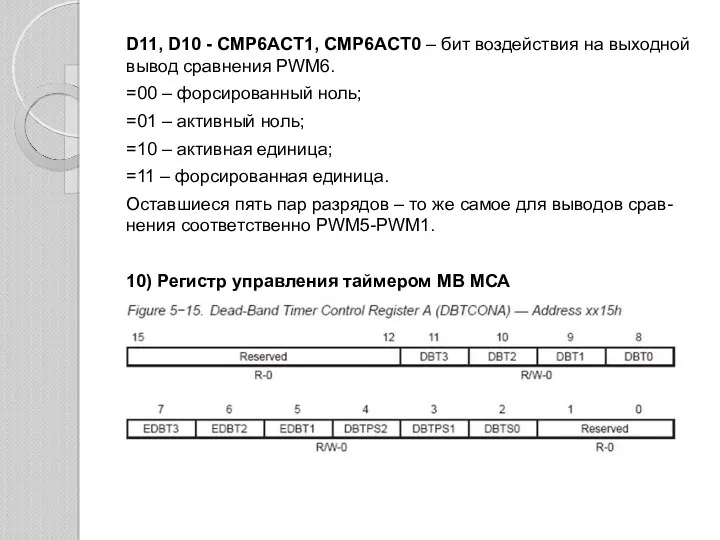
- 11. D11, D10 - CMP6ACT1, CMP6ACT0 – бит воздействия на выходной вывод сравнения PWM6. =00 – форсированный
- 12. D15-D12 – резерв. D11-D8 – DBT3–DBT0 – биты определяют величину периода трех 4-битных таймеров МВ. Тмв=(0…15)Тпдч.
- 14. Скачать презентацию
7. МС и ШИМ
4) Вариант реализация скалярной ШИМ в МПСУ:
Задать режимы
7. МС и ШИМ
4) Вариант реализация скалярной ШИМ в МПСУ:
Задать режимы
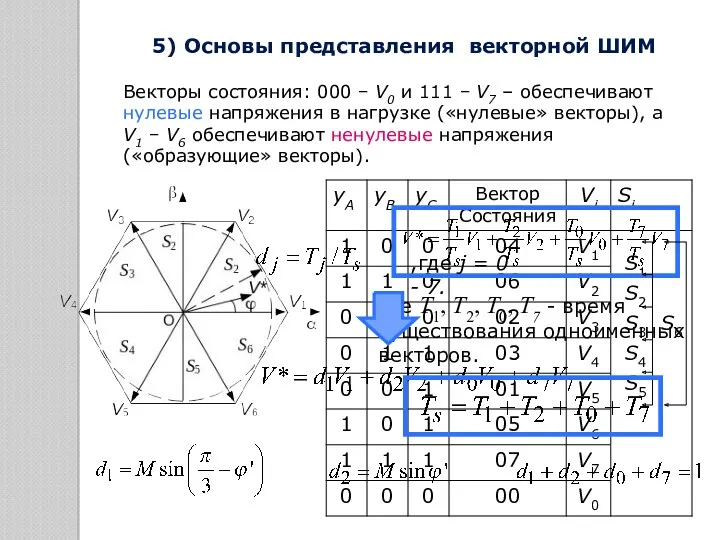
где Т1, Т2, Т0, Т7 - время существования одноименных векторов.
Векторы состояния:
где Т1, Т2, Т0, Т7 - время существования одноименных векторов.
Векторы состояния:
Порядок распределения векторов (и их длительностей) на интервале усреднения
Где ϕ'
Порядок распределения векторов (и их длительностей) на интервале усреднения
Где ϕ'
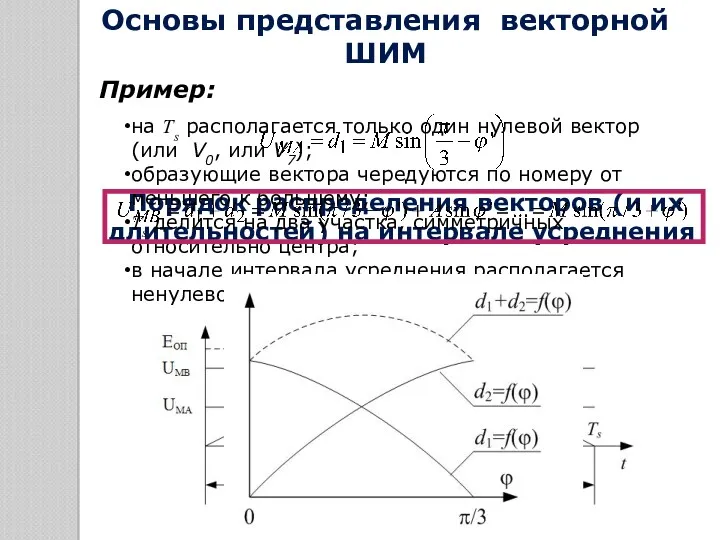
Порядок распределения векторов (и их длительностей) на интервале усреднения
на Ts
Порядок распределения векторов (и их длительностей) на интервале усреднения
на Ts
6) Вариант реализация векторной ШИМ в МПСУ:
Задать режимы работы МС и
6) Вариант реализация векторной ШИМ в МПСУ:
Задать режимы работы МС и
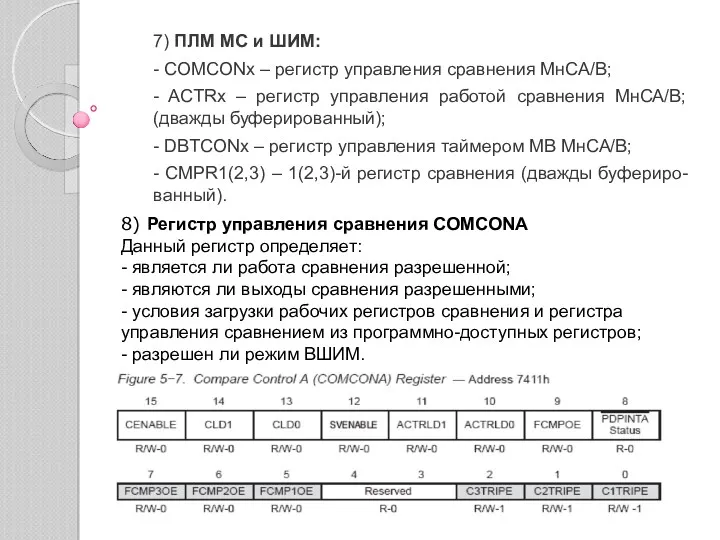
7) ПЛМ МС и ШИМ:
- COMCONx – регистр управления сравнения МнСА/В;
-
7) ПЛМ МС и ШИМ:
- COMCONx – регистр управления сравнения МнСА/В;
-
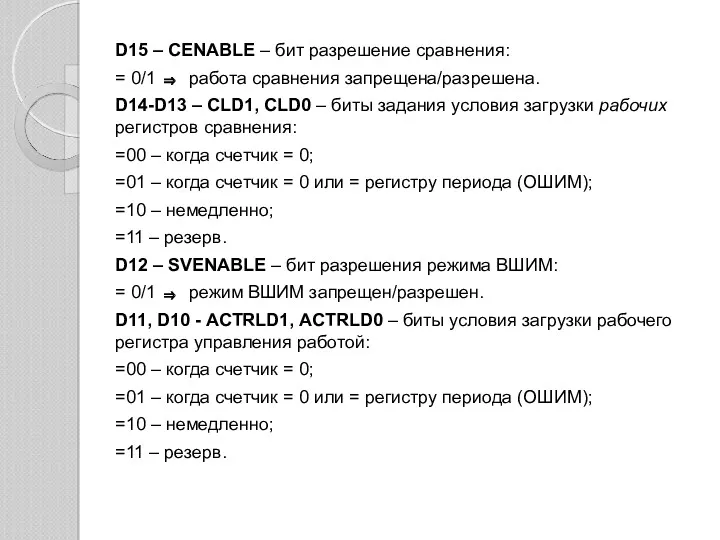
D15 – CENABLE – бит разрешение сравнения:
= 0/1 ⇒ работа сравнения
D15 – CENABLE – бит разрешение сравнения:
= 0/1 ⇒ работа сравнения
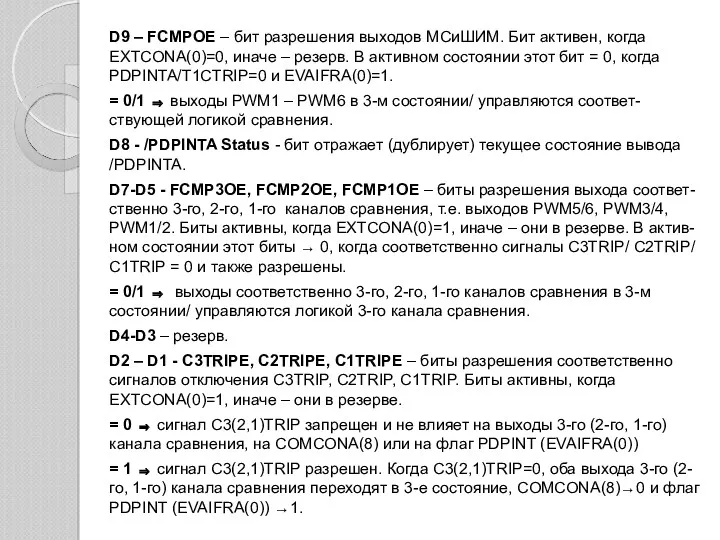
D9 – FCMPOE – бит разрешения выходов МСиШИМ. Бит активен, когда
D9 – FCMPOE – бит разрешения выходов МСиШИМ. Бит активен, когда
9) Регистр управления работой сравнения ACTRА
Регистр управление работой сравнения ACTRA
9) Регистр управления работой сравнения ACTRА
Регистр управление работой сравнения ACTRA
D11, D10 - CMP6ACT1, CMP6ACT0 – бит воздействия на выходной вывод
D11, D10 - CMP6ACT1, CMP6ACT0 – бит воздействия на выходной вывод
D15-D12 – резерв.
D11-D8 – DBT3–DBT0 – биты определяют величину периода трех
D15-D12 – резерв.
D11-D8 – DBT3–DBT0 – биты определяют величину периода трех
 Расчет пневматической прессовой формовочной машины
Расчет пневматической прессовой формовочной машины АЛС и САУТ Автоматическая локомотивная сигнализация с автостопом
АЛС и САУТ Автоматическая локомотивная сигнализация с автостопом Тимуровское движение
Тимуровское движение Работа КМ 394 в III положении
Работа КМ 394 в III положении Показатели специализации Костромской области
Показатели специализации Костромской области Жарка мяса
Жарка мяса What is Customer Journey Framework (CJF)?
What is Customer Journey Framework (CJF)? Іріңді паротит. Мастит. Парапроктит, лимфангаит, лимфаденит,тромбофлебит
Іріңді паротит. Мастит. Парапроктит, лимфангаит, лимфаденит,тромбофлебит Новації вступної кампанії 2016
Новації вступної кампанії 2016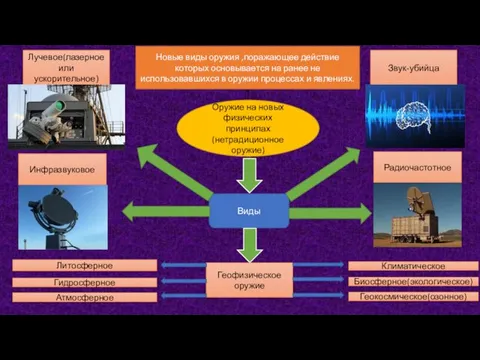 Новые виды оружия
Новые виды оружия Тропинками былинных героев. Задания
Тропинками былинных героев. Задания Презентация На зарядку становись! Диск
Презентация На зарядку становись! Диск Названия животных в Псалтири
Названия животных в Псалтири Подбор оборудования для центрального офиса
Подбор оборудования для центрального офиса Форсайт - сессия. Ресурсы системной оптимизации УдГУ
Форсайт - сессия. Ресурсы системной оптимизации УдГУ Методы и модели анализа и оценки инвестиционных проектов
Методы и модели анализа и оценки инвестиционных проектов Цели математического образования
Цели математического образования Презентация День рождения у Мишутки
Презентация День рождения у Мишутки Системы жизнеобеспечения. Системы водоснабжения. Инновационный центр Энергоэффективность, г. Иркутск
Системы жизнеобеспечения. Системы водоснабжения. Инновационный центр Энергоэффективность, г. Иркутск Барышня-крестьянка.Характеры героев (к аттестации)
Барышня-крестьянка.Характеры героев (к аттестации) Утренник Прощай, 2 класс!
Утренник Прощай, 2 класс! О состоянии наркоситуации на территории Мурманской области
О состоянии наркоситуации на территории Мурманской области Страдательный залог
Страдательный залог Спортивная подготовка туриста
Спортивная подготовка туриста Знакомство с Библией
Знакомство с Библией Анализ качества технологических процессов с помощью гистограмм
Анализ качества технологических процессов с помощью гистограмм Устройства электропривода для РЭУ и ТКС
Устройства электропривода для РЭУ и ТКС класс
класс