- Основные классы РЭС. (Тема 2)

Содержание
- 2. Радиолокационные и радионавигационные системы Основные принципы построения
- 3. Радиолокация Радиолокацией называют область науки и техники, объединяющую методы и средства обнаружения, измерения координат и параметров
- 4. Радионавигация Радионавигация – область науки и техники, охватывающая радиотехнические методы и средства вождения кораблей, летательных и
- 5. Радиоуправление Радиоуправление – отрасль техники, включающая радиотехнические методы и средства автоматического управления объектами. Совокупность технических средств
- 6. Радиолокация Активная Полуактивная Пассивная
- 7. Активная радиолокация Сигнал, принимаемый приемником РЛС, создается в результате отражения (рассеяния) объектом электромагнитных колебаний, излучаемых антенной
- 8. Активная радиолокация с активным ответом Применяют сигнал, ретранслируемый (переизлучаемый) специальным приемопередатчиком (ответчиком), установленным на объекте. Позволяет
- 9. Полуактивная радиолокация Носителем информации является сигнал, отраженный объектом, но источник радиоволн (передающее устройство) вынесен относительно приемника
- 10. Пассивная радиолокация (радиотеплокация) Сигналом, принимаемым РЛС, является естественное излучение объектов в радиодиапазоне преимущественно теплового происхождения. Зондирование
- 11. Всенаправленный дальномерный радиомаяк РМД (англ. Distance Measuring Equipment, DME) — вид радионавигационнойсистемы, обеспечивающей определение расстояния от
- 12. Основные характеристики РЛС Дальность действия Точность определения координат и скорости объектов Разрешающая способность, т.е. тот объем
- 13. Радиотехнические методы измерения координат Мгновенное положение объекта в пространстве определяется тремя координатами xi (i=1,2,3). Для характеристики
- 14. Радиолокационное определение координат
- 15. Определение местоположения объекта Радионавигационный параметр (РНП) – физическая величина, непосредственно измеряемая РНС (расстояние, разность или сумма
- 16. Классификация радиолокационных и радионавигационных систем Тактические и технические характеристики
- 17. Классификация РЛС По происхождению радиосигнала, принимаемого приемником РЛС: активные РЛС (с активным и пассивным ответом) полуактивные
- 18. РЛС дальнего обнаружения
- 19. РЛС «Небо-СВУ» Предназначена для контроля воздушного пространства, обнаружения, определения координат и сопровождения широкого класса современных воздушных
- 20. Классификация РЛС По числу применяемых каналов излучения и приема сигналов: Одноканальные Многоканальные с частотным или пространственным
- 21. РЛС Дон-2Н
- 22. Загоризонтная РЛС «Дуга»
- 23. Береговая РЛС
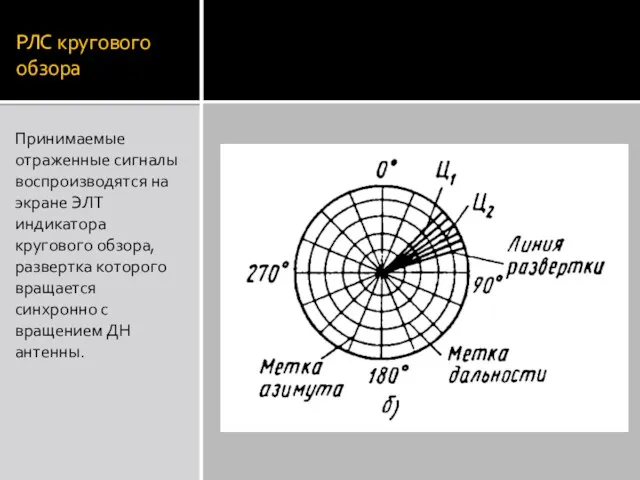
- 24. РЛС кругового обзора Принимаемые отраженные сигналы воспроизводятся на экране ЭЛТ индикатора кругового обзора, развертка которого вращается
- 25. Классификация РНС По способу определения местоположения объекта: Позиционные (угломерные, дальномерные, разностно-дальномерные и комбинированные) По виду несущего
- 26. Спутник навигационной системы GPS
- 27. Основные параметры системы Тактико-технические характеристики
- 28. Тактические характеристики РЛС и РНС Характеристики системы, определяющие ее функциональные возможности при практическом, в том числе
- 29. Надежность Свойство объекта сохранять во времени в установленных пределах значения параметров, характеризующих способность выполнения требуемых функций
- 30. Технические характеристики РЛС и РНС Метод обзора и измерения координат и параметров движения объекта; Рабочие частоты,
- 31. Дальность действия радиолиний
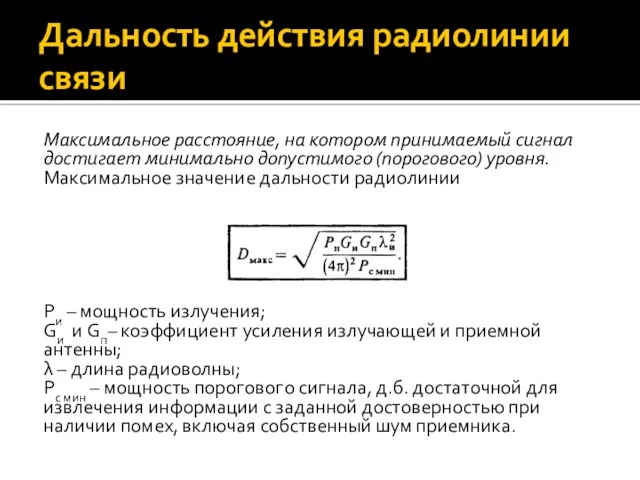
- 32. Дальность действия радиолинии связи Максимальное расстояние, на котором принимаемый сигнал достигает минимально допустимого (порогового) уровня. Максимальное
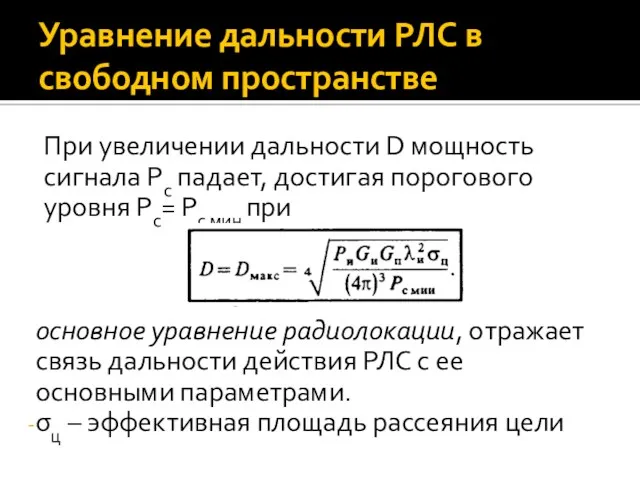
- 33. Уравнение дальности РЛС в свободном пространстве При увеличении дальности D мощность сигнала Pc падает, достигая порогового
- 34. Влияние отражения радиоволн от земной поверхности на дальность действия РЛС Дальность обнаружения кораблей и низколетящих целей
- 35. Дальность радиолокационного наблюдения с учетом поправки на кривизну Земли Кривизна ограничивает дальность радиолокационного обнаружения.
- 36. Влияние условий распространения на дальность действия РЛС и РНС Поглощение и преломление радиоволн (мм, см, дм)
- 37. Методы последовательного обзора пространства
- 38. Винтовой обзор
- 40. Скачать презентацию

Радиолокационные и радионавигационные системы
Основные принципы построения
Радиолокационные и радионавигационные системы
Основные принципы построения
Радиолокация
Радиолокацией называют область науки
и техники, объединяющую методы и средства
Радиолокация
Радиолокацией называют область науки
и техники, объединяющую методы и средства
Радионавигация
Радионавигация – область
науки и техники, охватывающая радиотехнические методы
Радионавигация
Радионавигация – область
науки и техники, охватывающая радиотехнические методы
Радиоуправление
Радиоуправление – отрасль техники, включающая радиотехнические методы и средства автоматического
Радиоуправление
Радиоуправление – отрасль техники, включающая радиотехнические методы и средства автоматического

Радиолокация
Активная
Полуактивная
Пассивная
Радиолокация
Активная
Полуактивная
Пассивная
Активная радиолокация
Сигнал, принимаемый приемником РЛС, создается в результате отражения (рассеяния) объектом
Активная радиолокация
Сигнал, принимаемый приемником РЛС, создается в результате отражения (рассеяния) объектом
Активная радиолокация с активным ответом
Применяют сигнал, ретранслируемый (переизлучаемый) специальным приемопередатчиком (ответчиком),
Активная радиолокация с активным ответом
Применяют сигнал, ретранслируемый (переизлучаемый) специальным приемопередатчиком (ответчиком),
Полуактивная радиолокация
Носителем информации является сигнал, отраженный объектом, но источник радиоволн (передающее
Полуактивная радиолокация
Носителем информации является сигнал, отраженный объектом, но источник радиоволн (передающее
Пассивная радиолокация (радиотеплокация)
Сигналом, принимаемым РЛС, является естественное излучение объектов в радиодиапазоне
Пассивная радиолокация (радиотеплокация)
Сигналом, принимаемым РЛС, является естественное излучение объектов в радиодиапазоне
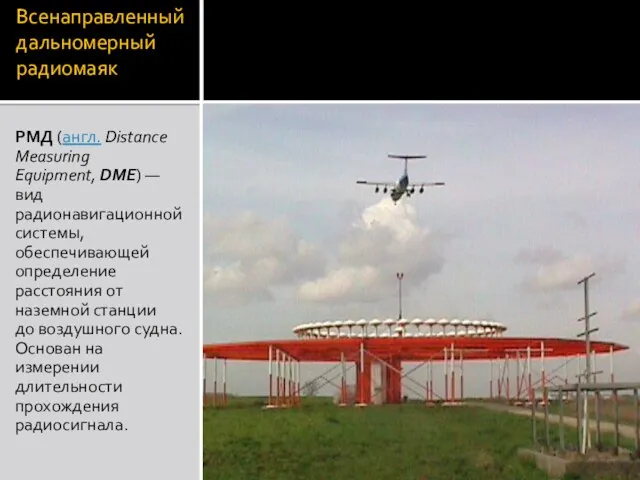
Всенаправленный дальномерный радиомаяк
РМД (англ. Distance Measuring Equipment, DME) — вид радионавигационнойсистемы, обеспечивающей определение расстояния от
Всенаправленный дальномерный радиомаяк
РМД (англ. Distance Measuring Equipment, DME) — вид радионавигационнойсистемы, обеспечивающей определение расстояния от
Основные характеристики РЛС
Дальность действия
Точность определения координат и скорости объектов
Разрешающая способность, т.е.
Основные характеристики РЛС
Дальность действия
Точность определения координат и скорости объектов
Разрешающая способность, т.е.
Радиотехнические методы измерения координат
Мгновенное положение объекта в пространстве определяется тремя
Радиотехнические методы измерения координат
Мгновенное положение объекта в пространстве определяется тремя
Радиолокационное определение координат
Радиолокационное определение координат
Определение местоположения объекта
Радионавигационный параметр (РНП) – физическая величина, непосредственно измеряемая РНС
Определение местоположения объекта
Радионавигационный параметр (РНП) – физическая величина, непосредственно измеряемая РНС
Классификация радиолокационных и радионавигационных систем
Тактические и технические характеристики
Классификация радиолокационных и радионавигационных систем
Тактические и технические характеристики
Классификация РЛС
По происхождению радиосигнала, принимаемого приемником РЛС:
активные РЛС (с активным и
Классификация РЛС
По происхождению радиосигнала, принимаемого приемником РЛС:
активные РЛС (с активным и

РЛС дальнего обнаружения
РЛС дальнего обнаружения

РЛС «Небо-СВУ»
Предназначена для контроля воздушного пространства, обнаружения, определения координат и сопровождения
РЛС «Небо-СВУ»
Предназначена для контроля воздушного пространства, обнаружения, определения координат и сопровождения
Классификация РЛС
По числу применяемых каналов излучения и приема сигналов:
Одноканальные
Многоканальные с частотным
Классификация РЛС
По числу применяемых каналов излучения и приема сигналов:
Одноканальные
Многоканальные с частотным

РЛС Дон-2Н
РЛС Дон-2Н

Загоризонтная РЛС «Дуга»
Загоризонтная РЛС «Дуга»

Береговая РЛС
Береговая РЛС
РЛС кругового обзора
Принимаемые отраженные сигналы воспроизводятся на экране ЭЛТ индикатора кругового
РЛС кругового обзора
Принимаемые отраженные сигналы воспроизводятся на экране ЭЛТ индикатора кругового
Классификация РНС
По способу определения местоположения объекта:
Позиционные (угломерные, дальномерные, разностно-дальномерные и комбинированные)
По
Классификация РНС
По способу определения местоположения объекта:
Позиционные (угломерные, дальномерные, разностно-дальномерные и комбинированные)
По

Спутник навигационной системы GPS
Спутник навигационной системы GPS
Основные параметры системы
Тактико-технические характеристики
Основные параметры системы
Тактико-технические характеристики
Тактические характеристики РЛС и РНС
Характеристики системы, определяющие ее функциональные возможности при
Тактические характеристики РЛС и РНС
Характеристики системы, определяющие ее функциональные возможности при
Надежность
Свойство объекта сохранять во времени в установленных пределах значения параметров,
Надежность
Свойство объекта сохранять во времени в установленных пределах значения параметров,
Технические характеристики РЛС и РНС
Метод обзора и измерения координат и параметров
Технические характеристики РЛС и РНС
Метод обзора и измерения координат и параметров
Дальность действия радиолиний
Дальность действия радиолиний
Дальность действия радиолинии связи
Максимальное расстояние, на котором принимаемый сигнал достигает минимально
Дальность действия радиолинии связи
Максимальное расстояние, на котором принимаемый сигнал достигает минимально
Уравнение дальности РЛС в свободном пространстве
При увеличении дальности D мощность сигнала
Уравнение дальности РЛС в свободном пространстве
При увеличении дальности D мощность сигнала
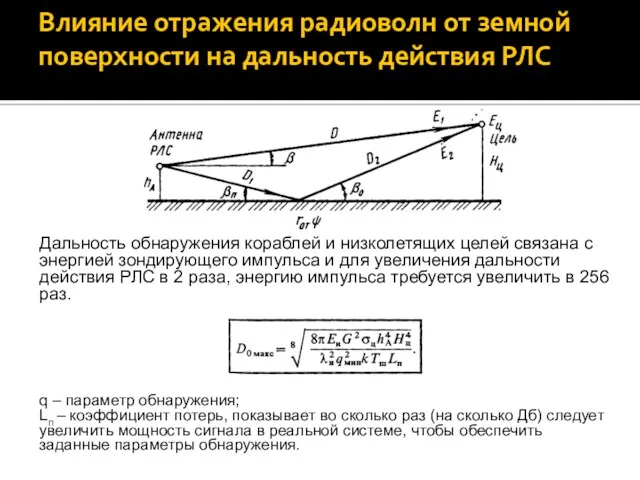
Влияние отражения радиоволн от земной поверхности на дальность действия РЛС
Дальность обнаружения
Влияние отражения радиоволн от земной поверхности на дальность действия РЛС
Дальность обнаружения
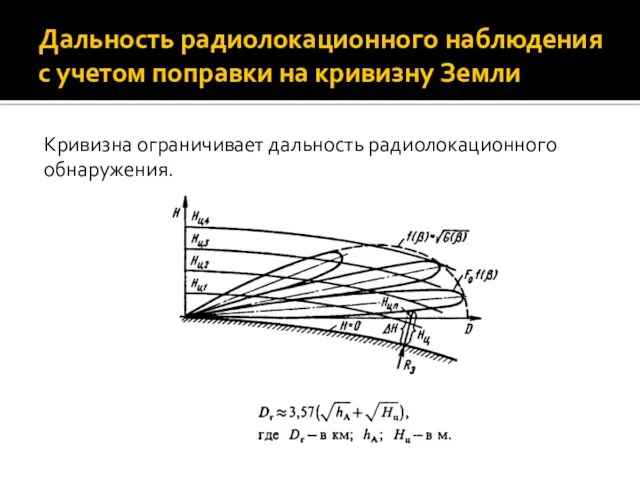
Дальность радиолокационного наблюдения с учетом поправки на кривизну Земли
Кривизна ограничивает дальность
Дальность радиолокационного наблюдения с учетом поправки на кривизну Земли
Кривизна ограничивает дальность
Влияние условий распространения на дальность действия РЛС и РНС
Поглощение и преломление
Влияние условий распространения на дальность действия РЛС и РНС
Поглощение и преломление
Методы последовательного обзора пространства
Методы последовательного обзора пространства
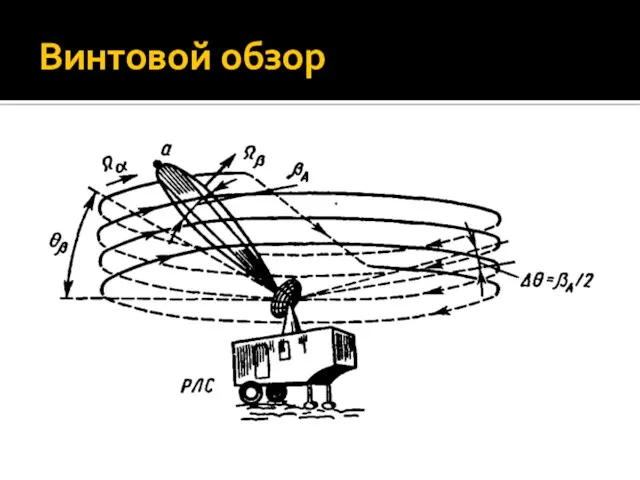
Винтовой обзор
Винтовой обзор
 Нравственный закон человеческой жизни
Нравственный закон человеческой жизни Творческий мини-проект по благоустройству территории ДОУ.
Творческий мини-проект по благоустройству территории ДОУ. Особенности развития обучающихся с ТНР младшего школьного возраста
Особенности развития обучающихся с ТНР младшего школьного возраста Страховое медицинское общество ООО СМО Спасение
Страховое медицинское общество ООО СМО Спасение Без бога ти не ти
Без бога ти не ти Символ веры. Шестой член Символа веры
Символ веры. Шестой член Символа веры Зимние забавы с Дедом Морозом
Зимние забавы с Дедом Морозом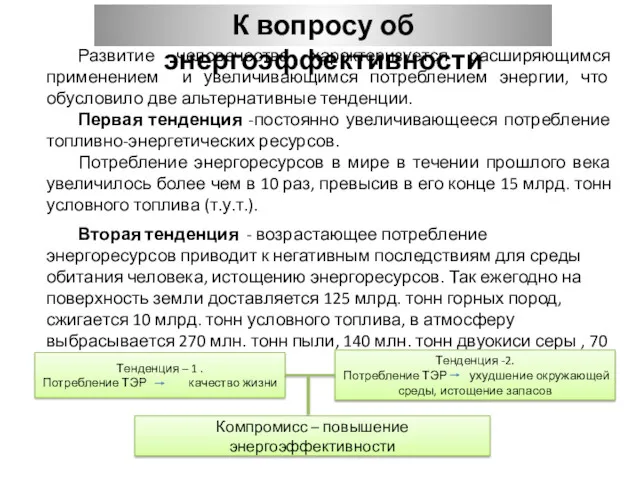 К вопросу об энергоэффективности
К вопросу об энергоэффективности Выключатели типов ВАБ-42 и ВАТ-42
Выключатели типов ВАБ-42 и ВАТ-42 презентация светофор
презентация светофор Лекции по архитектуре. Общие сведение о зданиях и сооружениях
Лекции по архитектуре. Общие сведение о зданиях и сооружениях Russian Federation
Russian Federation Постоянный электрический ток
Постоянный электрический ток МСФО (IAS) 16. Основные средства
МСФО (IAS) 16. Основные средства Предприятие. Типы предприятий
Предприятие. Типы предприятий Правила технической эксплуатации железных дорог Российской Федерации
Правила технической эксплуатации железных дорог Российской Федерации Практическая направленность через развитие познавательных и творческих способностей обучающихся
Практическая направленность через развитие познавательных и творческих способностей обучающихся Сель. Характеристика сели. Причина возникновения сели. Классификация. Сель в Алматы 1921 года и 1973 года
Сель. Характеристика сели. Причина возникновения сели. Классификация. Сель в Алматы 1921 года и 1973 года Рекомендации логопеда родителям на лето.
Рекомендации логопеда родителям на лето. Вводные слова и предложения.Методический материал 8 класс
Вводные слова и предложения.Методический материал 8 класс Ткани растений
Ткани растений Ресурстанудың негізгі терминдері. Экспедициялық ресурстық зерттеулер
Ресурстанудың негізгі терминдері. Экспедициялық ресурстық зерттеулер Некоторые философские проблемы физики элементарных частиц
Некоторые философские проблемы физики элементарных частиц Электрооборудование автомобилей. Генераторные установки
Электрооборудование автомобилей. Генераторные установки Итоги исполнения местных бюджетов Калининградской области
Итоги исполнения местных бюджетов Калининградской области Індивідуальне дослідне завдання на тему “Церква Сатани “. Лекція 2.5
Індивідуальне дослідне завдання на тему “Церква Сатани “. Лекція 2.5 Клиновидная кость
Клиновидная кость Использование изобразительной деятельности для развития мелкой моторики у детей логопатов.
Использование изобразительной деятельности для развития мелкой моторики у детей логопатов.