- Основы кибернетики и робототехники. Лекция 8

Содержание
- 2. Битовые операции Бит – элементарная ячейка памяти микроконтроллера. Зачем вообще нужно уметь работать с битами: Гибкая
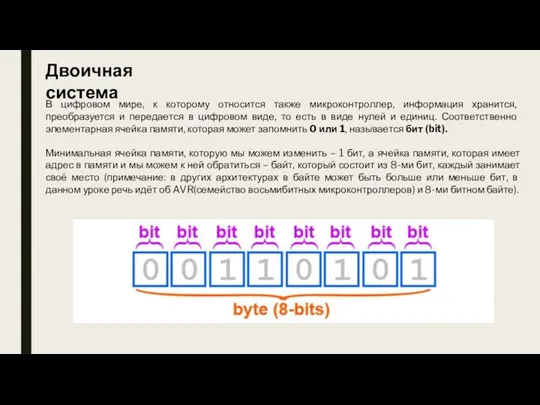
- 3. Двоичная система В цифровом мире, к которому относится также микроконтроллер, информация хранится, преобразуется и передается в
- 4. Вспомним двоичную систему счисления из школьного курса информатики: Здесь также нужно увидеть важность степени двойки –
- 5. Если “сложить” полный байт в десятичном представлении каждого бита: 128+64+32+16+8+4+2+1 – получится 255. Нетрудно догадаться, что
- 6. Битовые операции Битовое И Битовое ИЛИ Битовое НЕ Битовое исключающее ИЛИ Битовый сдвиг
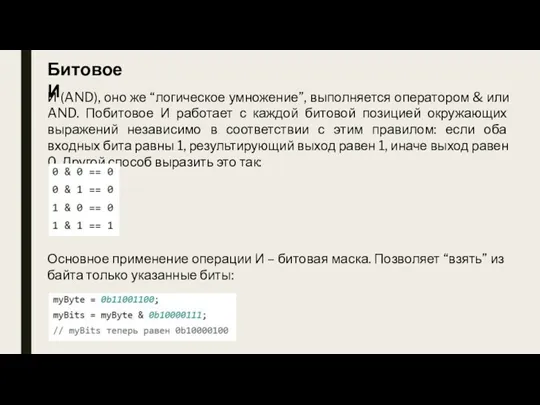
- 7. Битовое И И (AND), оно же “логическое умножение”, выполняется оператором & или AND. Побитовое И работает
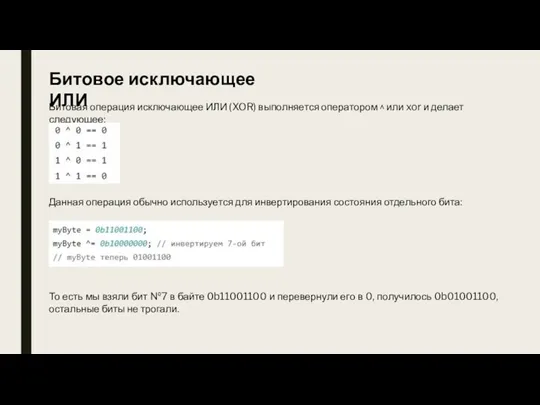
- 8. То есть при помощи & мы взяли из байта 0b11001100 только биты 10000111, а именно –
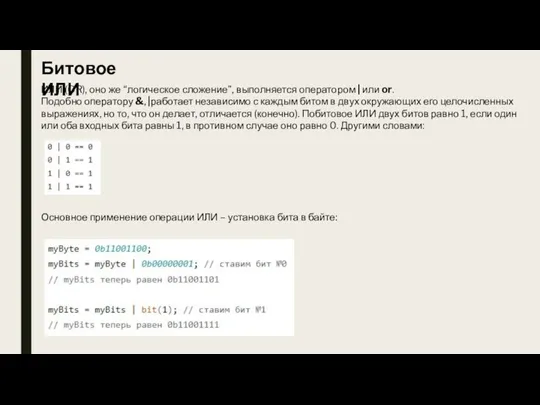
- 9. Битовое ИЛИ ИЛИ (OR), оно же “логическое сложение”, выполняется оператором | или or. Подобно оператору &,
- 10. Также можно использовать составной оператор |= |= это оператор присвоения битового "или", аналогичен a |= b
- 11. Битовое исключающее ИЛИ Битовая операция исключающее ИЛИ (XOR) выполняется оператором ^ или xor и делает следующее:
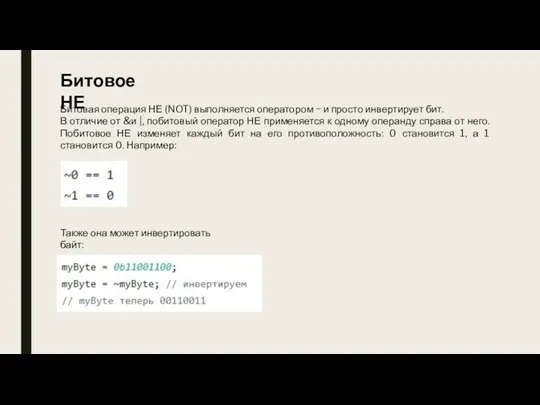
- 12. Битовое НЕ Битовая операция НЕ (NOT) выполняется оператором ~ и просто инвертирует бит. В отличие от
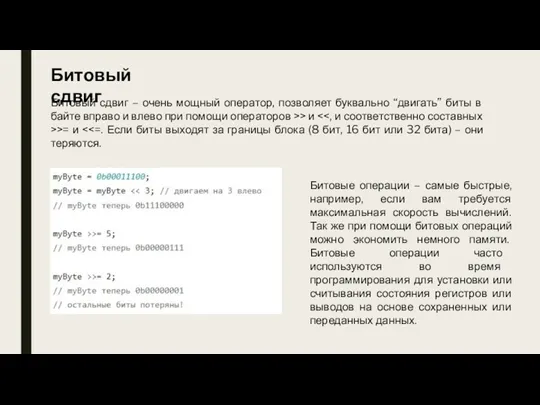
- 13. Битовый сдвиг Битовый сдвиг – очень мощный оператор, позволяет буквально “двигать” биты в байте вправо и
- 14. Функции для работы с битами bitRead() - функция позволяет прочитать значение определенного бита в указанной переменной.
- 15. Альтернативным способом изменения состояния (значения) бита для функции bitWrite() — функции bitSet() и bitClear(). В функции
- 16. Arduino Uno Arduino Uno является стандартной платой Arduino и возможно наиболее распространенной. Она основана на чипе
- 17. Arduino Leonardo Большее количество аналоговых входов (12 против 6) для сенсоров, больше каналов ШИМ (7 против
- 18. Arduino Mega Как Arduino Uno, но на базе более мощного микроконтроллера той же архитектуры. Отличный выбор
- 19. Arduino Due Процессор на 84 МГц и 512 КБ памяти. 66 пинов ввода-вывода, из которых 12
- 20. Arduino Mini Та же Arduino Uno, но в другом форм-факторе. Компактная: всего 30×18 мм. Из-за форм-фактора
- 21. Arduino Micro Arduino Micro — это Arduino Leonardo, исполненный на компактной плате. Отличие заключается в отсутствии
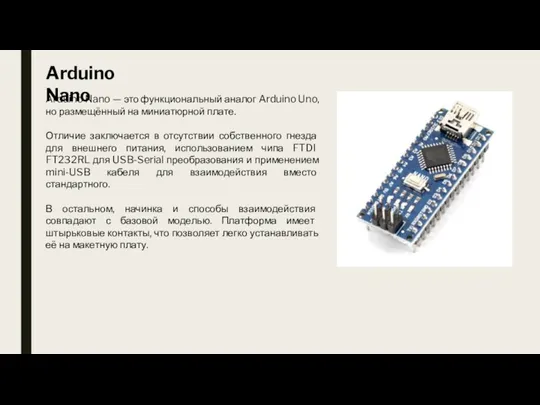
- 22. Arduino Nano Arduino Nano — это функциональный аналог Arduino Uno, но размещённый на миниатюрной плате. Отличие
- 23. Arduino M0 Забудьте про экономию памяти программ и ресурсов на Arduino Uno. С платой Arduino M0
- 24. Arduino LilyPad — довольно интересное устройство. Оно выпадает из привычных стереотипов об обычном Arduino, потому что
- 25. Платы расширения для ардуино Плата расширения Arduino – это законченное устройство, предназначенное для выполнения определенных функций
- 26. Arduino Sensor Shield Как правило, эта плата расширения идет в наборах ардуино и поэтому именно с
- 27. Данный шилд ардуино очень важен в робототехнических проектах, т.к. позволяет подключать к плате Arduino сразу обычный
- 28. Arduino Ethernet Shield Организация работы с сетью – одна из самых важных задач в современных проектах.
- 29. Платы расширения для прототипирования Эти платы достаточно просты – на них расположены контактные площадки для монтажа
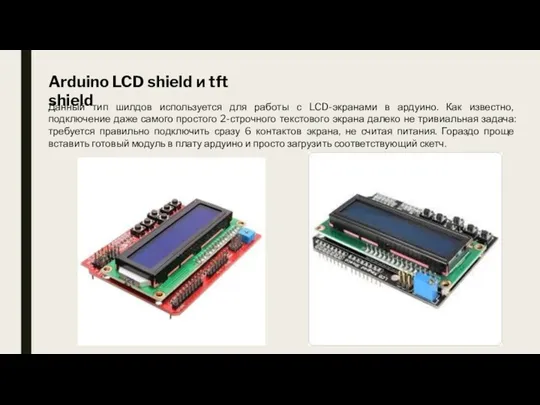
- 30. Arduino LCD shield и tft shield Данный тип шилдов используется для работы с LCD-экранами в ардуино.
- 31. Arduino Data Logger Shield Еще одна задача, которую достаточно трудно реализовывать самостоятельно в своих изделиях –
- 32. Сдвиговые регистры Плата Arduino содержит ограниченное число выводов и при сложном проекте их не хватает для
- 33. В электронике регистром называют устройство, которое может хранить небольшой объем данных для быстрого доступа к ним.
- 34. Пусть в начальном состоянии регистр уже заполнен какими-то восемью битами. Попробуем «задвинуть» в него восемь новых
- 35. Регистры можно соединять в цепочку. В таком случае, вытесненный бит не будет пропадать без следа, а
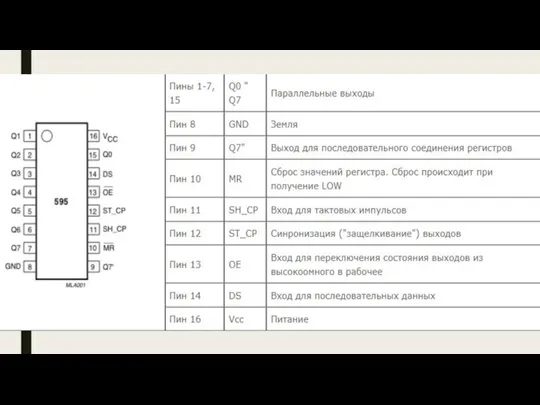
- 36. 74HC595 Самым популярным является восьмиразрядный сдвиговый регистр 74HC595. 74HC595 — восьмиразрядный (8 управляемых выходов) сдвиговый регистр
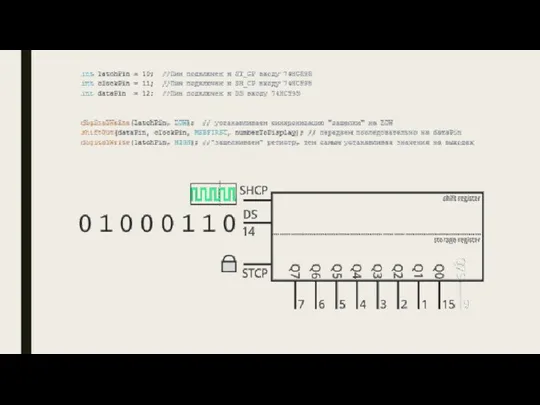
- 38. Чтобы записать выходы через Arduino, мы должны отправить двоичное значение в регистр сдвига, и из этого
- 39. Соберём схему, для которой понадобится сдвиговый регистр и восемь светодиодов с резисторами. При этом обратите внимание,
- 40. Вот так бы эта схема выглядела в реальной жизни.
- 42. Задание 1. Включаем один светодиод. Попробуем включить один светодиод. Сначала указываем используемые выводы платы (тактовая линия
- 43. Если в shiftOut() поменять LSBFIRST на MSBFIRST, то включится не первый, а последний светодиод в цепочке
- 44. При работе с несколькими светодиодами не очень удобно постоянно писать три строчки кода для каждого светодиода
- 45. Задание 3. Анимация светодиодов Добавьте несколько разных вариантов включения светодиодов (добавьте еще 4 элемента массива).
- 47. Скачать презентацию
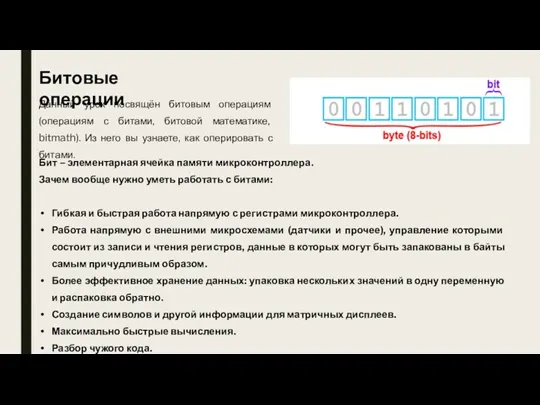
Битовые операции
Бит – элементарная ячейка памяти микроконтроллера.
Зачем вообще нужно уметь
Битовые операции
Бит – элементарная ячейка памяти микроконтроллера.
Зачем вообще нужно уметь
Двоичная система
В цифровом мире, к которому относится также микроконтроллер, информация хранится,
Двоичная система
В цифровом мире, к которому относится также микроконтроллер, информация хранится,
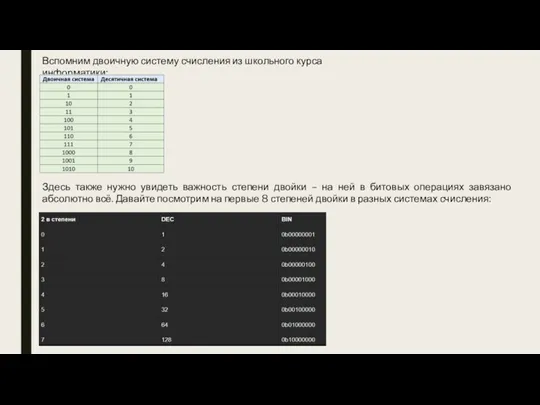
Вспомним двоичную систему счисления из школьного курса информатики:
Здесь также нужно увидеть
Вспомним двоичную систему счисления из школьного курса информатики:
Здесь также нужно увидеть
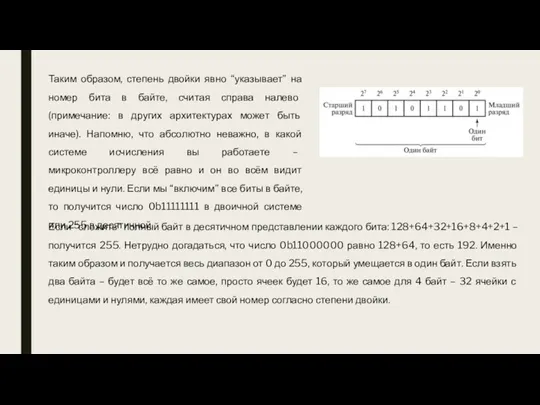
Если “сложить” полный байт в десятичном представлении каждого бита: 128+64+32+16+8+4+2+1 –
Если “сложить” полный байт в десятичном представлении каждого бита: 128+64+32+16+8+4+2+1 –
Битовые операции
Битовое И
Битовое ИЛИ
Битовое НЕ
Битовое исключающее ИЛИ
Битовый сдвиг
Битовые операции
Битовое И
Битовое ИЛИ
Битовое НЕ
Битовое исключающее ИЛИ
Битовый сдвиг
Битовое И
И (AND), оно же “логическое умножение”, выполняется оператором & или
Битовое И
И (AND), оно же “логическое умножение”, выполняется оператором & или
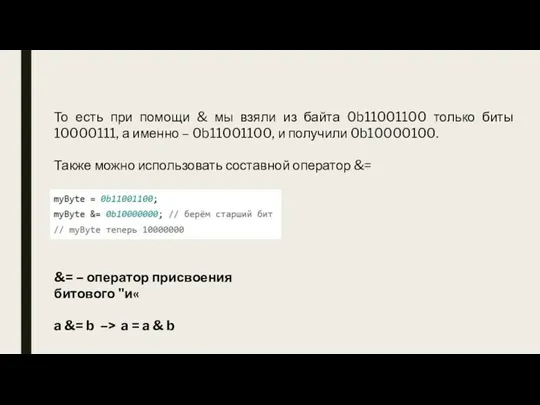
То есть при помощи & мы взяли из байта 0b11001100 только
То есть при помощи & мы взяли из байта 0b11001100 только
Битовое ИЛИ
ИЛИ (OR), оно же “логическое сложение”, выполняется оператором | или
Битовое ИЛИ
ИЛИ (OR), оно же “логическое сложение”, выполняется оператором | или
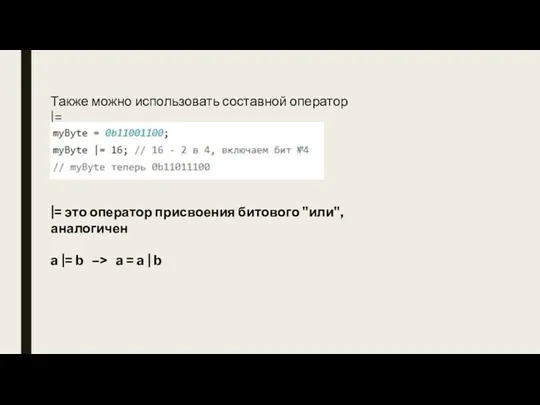
Также можно использовать составной оператор |=
|= это оператор присвоения битового "или",
Также можно использовать составной оператор |=
|= это оператор присвоения битового "или",
Битовое исключающее ИЛИ
Битовая операция исключающее ИЛИ (XOR) выполняется оператором ^ или
Битовое исключающее ИЛИ
Битовая операция исключающее ИЛИ (XOR) выполняется оператором ^ или
Битовое НЕ
Битовая операция НЕ (NOT) выполняется оператором ~ и просто инвертирует
Битовое НЕ
Битовая операция НЕ (NOT) выполняется оператором ~ и просто инвертирует
Битовый сдвиг
Битовый сдвиг – очень мощный оператор, позволяет буквально “двигать” биты
Битовый сдвиг
Битовый сдвиг – очень мощный оператор, позволяет буквально “двигать” биты
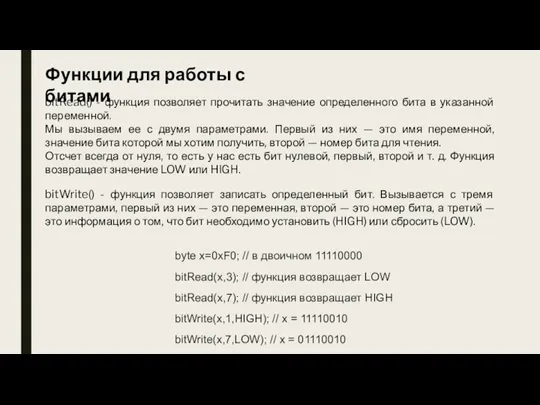
Функции для работы с битами
bitRead() - функция позволяет прочитать значение определенного
Функции для работы с битами
bitRead() - функция позволяет прочитать значение определенного
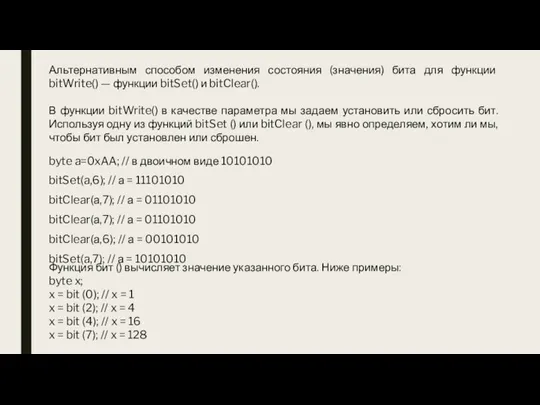
Альтернативным способом изменения состояния (значения) бита для функции bitWrite() — функции
Альтернативным способом изменения состояния (значения) бита для функции bitWrite() — функции

Arduino Uno
Arduino Uno является стандартной платой Arduino и возможно наиболее распространенной.
Arduino Uno
Arduino Uno является стандартной платой Arduino и возможно наиболее распространенной.

Arduino Leonardo
Большее количество аналоговых входов (12 против 6) для сенсоров, больше
Arduino Leonardo
Большее количество аналоговых входов (12 против 6) для сенсоров, больше
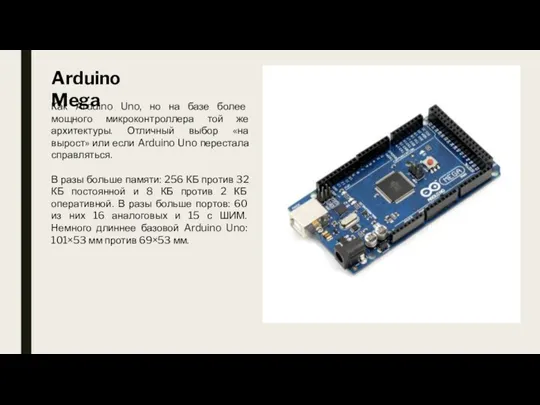
Arduino Mega
Как Arduino Uno, но на базе более мощного микроконтроллера той
Arduino Mega
Как Arduino Uno, но на базе более мощного микроконтроллера той

Arduino Due
Процессор на 84 МГц и 512 КБ памяти. 66 пинов
Arduino Due
Процессор на 84 МГц и 512 КБ памяти. 66 пинов
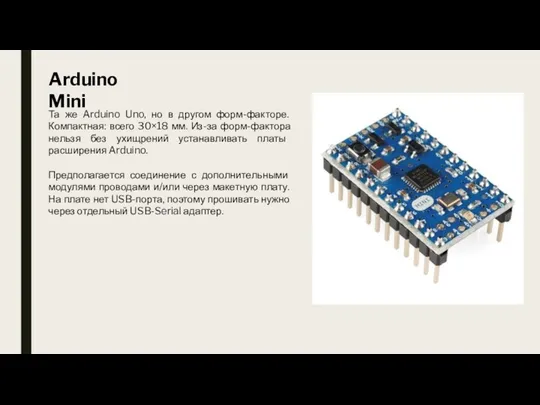
Arduino Mini
Та же Arduino Uno, но в другом форм-факторе. Компактная: всего
Arduino Mini
Та же Arduino Uno, но в другом форм-факторе. Компактная: всего

Arduino Micro
Arduino Micro — это Arduino Leonardo, исполненный на компактной плате.
Arduino Micro
Arduino Micro — это Arduino Leonardo, исполненный на компактной плате.
Arduino Nano
Arduino Nano — это функциональный аналог Arduino Uno, но размещённый
Arduino Nano
Arduino Nano — это функциональный аналог Arduino Uno, но размещённый

Arduino M0
Забудьте про экономию памяти программ и ресурсов на Arduino Uno.
Arduino M0
Забудьте про экономию памяти программ и ресурсов на Arduino Uno.
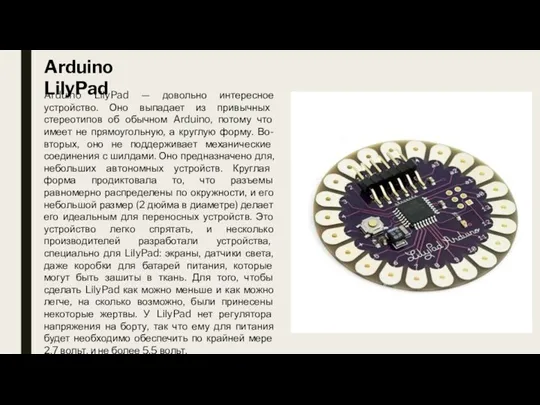
Arduino LilyPad — довольно интересное устройство. Оно выпадает из привычных стереотипов
Arduino LilyPad — довольно интересное устройство. Оно выпадает из привычных стереотипов

Платы расширения для ардуино
Плата расширения Arduino – это законченное устройство, предназначенное
Платы расширения для ардуино
Плата расширения Arduino – это законченное устройство, предназначенное

Arduino Sensor Shield
Как правило, эта плата расширения идет в наборах ардуино
Arduino Sensor Shield
Как правило, эта плата расширения идет в наборах ардуино

Данный шилд ардуино очень важен в робототехнических проектах, т.к. позволяет подключать
Данный шилд ардуино очень важен в робототехнических проектах, т.к. позволяет подключать

Arduino Ethernet Shield
Организация работы с сетью – одна из самых важных
Arduino Ethernet Shield
Организация работы с сетью – одна из самых важных

Платы расширения для прототипирования
Эти платы достаточно просты – на них расположены
Платы расширения для прототипирования
Эти платы достаточно просты – на них расположены
Arduino LCD shield и tft shield
Данный тип шилдов используется для работы
Arduino LCD shield и tft shield
Данный тип шилдов используется для работы

Arduino Data Logger Shield
Еще одна задача, которую достаточно трудно реализовывать самостоятельно
Arduino Data Logger Shield
Еще одна задача, которую достаточно трудно реализовывать самостоятельно

Сдвиговые регистры
Плата Arduino содержит ограниченное число выводов и при сложном проекте
Сдвиговые регистры
Плата Arduino содержит ограниченное число выводов и при сложном проекте
В электронике регистром называют устройство, которое может хранить небольшой объем данных
В электронике регистром называют устройство, которое может хранить небольшой объем данных
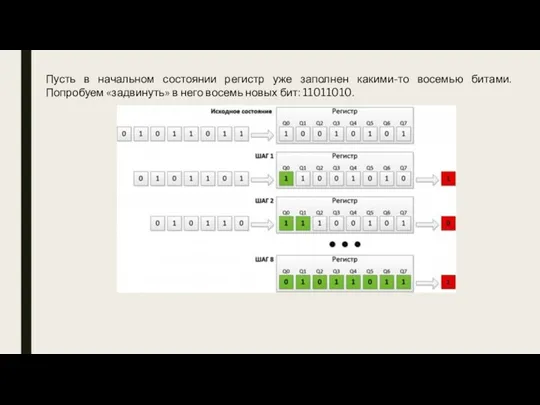
Пусть в начальном состоянии регистр уже заполнен какими-то восемью битами. Попробуем
Пусть в начальном состоянии регистр уже заполнен какими-то восемью битами. Попробуем

Регистры можно соединять в цепочку. В таком случае, вытесненный бит не
Регистры можно соединять в цепочку. В таком случае, вытесненный бит не

74HC595
Самым популярным является восьмиразрядный сдвиговый регистр 74HC595.
74HC595 — восьмиразрядный (8
74HC595
Самым популярным является восьмиразрядный сдвиговый регистр 74HC595.
74HC595 — восьмиразрядный (8
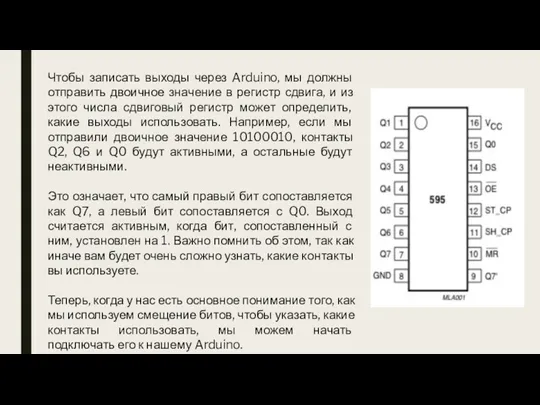
Чтобы записать выходы через Arduino, мы должны отправить двоичное значение в
Чтобы записать выходы через Arduino, мы должны отправить двоичное значение в
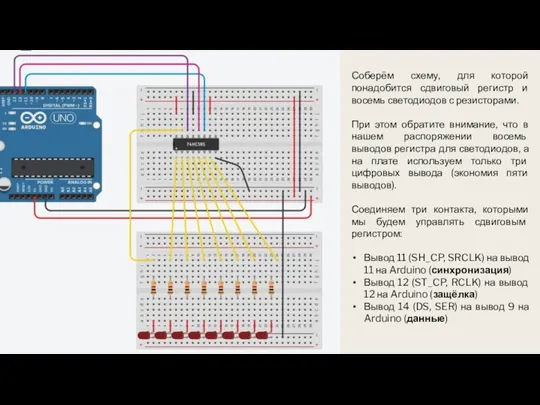
Соберём схему, для которой понадобится сдвиговый регистр и восемь светодиодов с
Соберём схему, для которой понадобится сдвиговый регистр и восемь светодиодов с
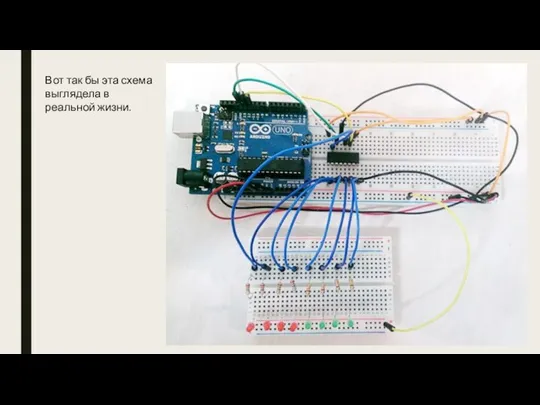
Вот так бы эта схема выглядела в реальной жизни.
Вот так бы эта схема выглядела в реальной жизни.
Задание 1. Включаем один светодиод.
Попробуем включить один светодиод. Сначала указываем используемые
Задание 1. Включаем один светодиод.
Попробуем включить один светодиод. Сначала указываем используемые
Если в shiftOut() поменять LSBFIRST на MSBFIRST, то включится не первый,
Если в shiftOut() поменять LSBFIRST на MSBFIRST, то включится не первый,
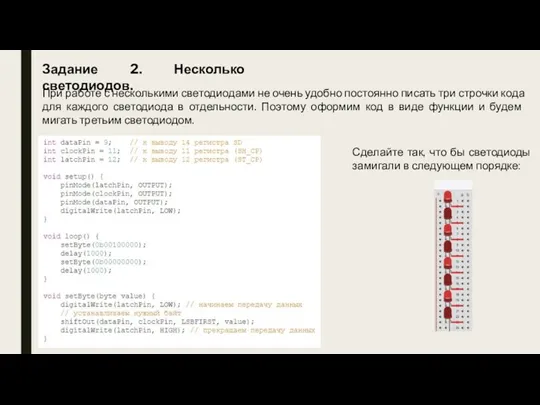
При работе с несколькими светодиодами не очень удобно постоянно писать три
При работе с несколькими светодиодами не очень удобно постоянно писать три
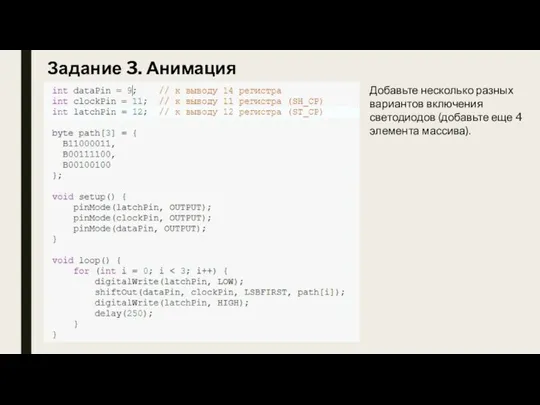
Задание 3. Анимация светодиодов
Добавьте несколько разных вариантов включения светодиодов (добавьте еще
Задание 3. Анимация светодиодов
Добавьте несколько разных вариантов включения светодиодов (добавьте еще
 Кружок Волшебная бумага
Кружок Волшебная бумага Железнодорожный транспорт России
Железнодорожный транспорт России Свойства тканей. Классификация текстильных волокон
Свойства тканей. Классификация текстильных волокон Основные характеристики компьютера
Основные характеристики компьютера Управление и алгоритмы
Управление и алгоритмы Топливно-энергетический комплекс России
Топливно-энергетический комплекс России Презентация Великая Отечественная война в моей семье...
Презентация Великая Отечественная война в моей семье... Презентации к урокам
Презентации к урокам Угол между векторами. Скалярное произведение векторов
Угол между векторами. Скалярное произведение векторов Написание ВКР на кафедре акушерства, гинекологии и репродуктологии
Написание ВКР на кафедре акушерства, гинекологии и репродуктологии Визуальная диагностика при комах
Визуальная диагностика при комах Религии Океании и Австралии
Религии Океании и Австралии Помоги животным!
Помоги животным! Права ребенка - обязанности родителей
Права ребенка - обязанности родителей Влияние среды на строение листа
Влияние среды на строение листа Святая Пасха
Святая Пасха Писатель и Книга. Юбиляры 2020 года
Писатель и Книга. Юбиляры 2020 года Общие сведения о резании металлов. Элементы процесса резания
Общие сведения о резании металлов. Элементы процесса резания Ботанические редкости Австралии
Ботанические редкости Австралии Родительское собрание В мир помоги войти с Надеждой и Любовью
Родительское собрание В мир помоги войти с Надеждой и Любовью Традиции и обычаи Индии.
Традиции и обычаи Индии. КТ1
КТ1 Древняя Индия
Древняя Индия Крайние точки России
Крайние точки России Горжусь тобой, моя Самара!
Горжусь тобой, моя Самара! Подготовка реферата по социальной информатике
Подготовка реферата по социальной информатике Игра Звёздный час
Игра Звёздный час Речевые ошибки и коммуникативный подход
Речевые ошибки и коммуникативный подход