- Основы телемеханики

Содержание
- 2. Телемеханика – область науки и техники, предметом которой является разработка методов и технических средств передачи и
- 3. Телемеханизация применяется когда необходимо объединить разобщенные или территориально рассредоточенные объекты управления в единый производственный комплекс, либо
- 4. Внедрение телемеханических систем позволяет сократить численность обслуживающего персонала, уменьшает простои оборудования, освобождает человека от работы во
- 5. Основные задачи систем телемеханики: измерение, преобразование и нормирование текущих значений технологических параметров как по внутреннему алгоритму,
- 6. - сигнализация об аварийных ситуациях и режимах работы технологического оборудования и вспомогательных объектов; - управление технологическими
- 7. - формирование и передача на верхний уровень телеметрической информации о состоянии каналов связи и устройств комплекса;
- 8. - передача информации и прием команд с верхнего уровня; - регистрация и накопление в базе данных
- 9. Функции телемеханики Телеизмерение – получение информации о значениях измеряемых параметров (давления, температуры и т.п.) контролируемых и
- 10. Для измерения используют преобразователи, которые преобразуют физические параметры в нормированные электрические сигналы. Контроллер КП измеряет значения
- 11. Функции телемеханики Телесигнализация – получение информации о состоянии контролируемых и управляемых объектов, имеющих ряд возможных дискретных
- 12. Для получения данных объект оснащают датчиками. Контроллер КП опрашивает состояние датчиков и при изменении состояния передает
- 13. Функции телемеханики Телеуправление – управление положением или состоянием дискретных объектов и объектов с непрерывным множеством состояний.
- 14. Управление начинается с выдачи оператором (диспетчером) команды телеуправления с ЭВМ или пульта управления. Команды телеуправления обычно
- 15. Контроллер КП, получив команду телеуправления, проверяет ее достоверность и выдает электрический сигнал на исполнительное устройство (например,
- 16. Функции телемеханики Телерегулирование - обеспечивает дистанционное задание уровня воздействия на объект управления.
- 17. Управление начинается с задания оператором величины воздействия и выдачей команды с ЭВМ. Команда телерегулирования передается с
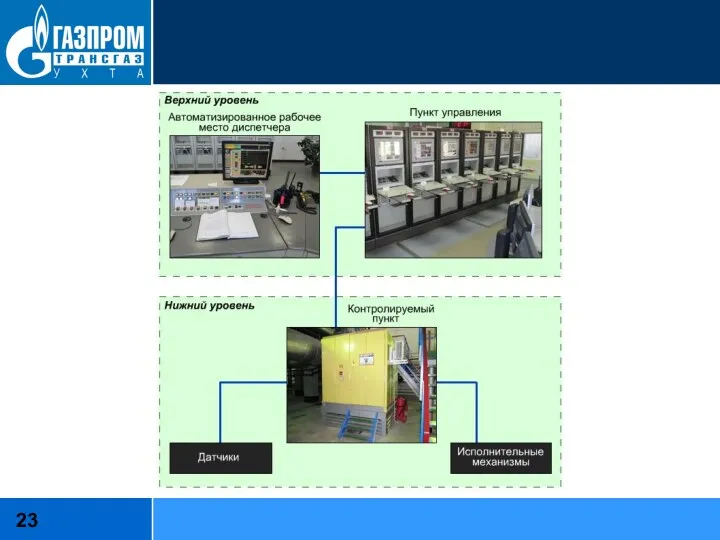
- 18. Система телемеханики структурно подразделяется на 2 уровня: - верхний уровень (Пункт управления (ПУ); - нижний уровень
- 19. Верхний уровень (ПУ) представляет собой комплекс программно - технических средств и предназначен для обеспечения требуемого режима
- 20. Контроль и управление системой осуществляют с Пункта Управления (ПУ), где находится диспетчер, аппаратура телемеханики, ЭВМ, мнемонический
- 21. Нижний уровень состоит из Контролируемых Пунктов (КП) территориально распределенных в соответствии с технологическим оборудованием линейной части
- 22. Объекты контроля и управления находятся на Контролируемых Пунктах (КП), одном или нескольких.
- 24. Контролируемый пункт (КП) – предназначен для: - сбора, преобразования и передачи информации от первичных преобразователей (датчиков);
- 25. Контролируемый пункт (КП) – предназначен для: - идентификации и формирования команд управления на исполнительные устройства объектов
- 26. Контролируемый пункт (КП) – предназначен для: - сигнализации положения, состояния и режимов работы технологического оборудования и
- 27. Взаимодействие между ПУ и КП происходит по каналу связи: кабельная линия; оптоволоконная линия; выделенный телефонный канал;
- 28. Данные между ПУ и КП передают короткими массивами, которые называют кадрами, фреймами, посылками. Посылки вместе с
- 29. Адрес должен однозначно идентифицировать измеряемый параметр в рамках всей системы, например, номер контроллера ПУ – номер
- 30. Способ кодирования данных и порядок обмена посылками называют протоколом обмена. Одним из основных требований при выборе
- 31. Работа системы телемеханики Информация от датчиков КП в виде нормированных электрических сигналов поступает в контроллер. Контроллер
- 32. При необходимости вмешательства в ход контролируемого процесса оператор выдает в систему команду телеуправления. C ЭВМ команда
- 34. Скачать презентацию
Телемеханика – область науки и техники, предметом которой является разработка методов
Телемеханика – область науки и техники, предметом которой является разработка методов
Телемеханизация применяется когда необходимо объединить разобщенные или территориально рассредоточенные объекты управления
Телемеханизация применяется когда необходимо объединить разобщенные или территориально рассредоточенные объекты управления
Внедрение телемеханических систем позволяет сократить численность обслуживающего персонала, уменьшает простои оборудования,
Внедрение телемеханических систем позволяет сократить численность обслуживающего персонала, уменьшает простои оборудования,
Основные задачи систем телемеханики:
измерение, преобразование и нормирование текущих значений технологических параметров
Основные задачи систем телемеханики:
измерение, преобразование и нормирование текущих значений технологических параметров
- сигнализация об аварийных ситуациях и режимах работы технологического оборудования и
- сигнализация об аварийных ситуациях и режимах работы технологического оборудования и
- формирование и передача на верхний уровень телеметрической информации о состоянии
- формирование и передача на верхний уровень телеметрической информации о состоянии
- передача информации и прием команд с верхнего уровня;
- регистрация и
- передача информации и прием команд с верхнего уровня;
- регистрация и
Функции телемеханики
Телеизмерение – получение информации о значениях измеряемых параметров (давления, температуры
Функции телемеханики
Телеизмерение – получение информации о значениях измеряемых параметров (давления, температуры
Для измерения используют преобразователи, которые преобразуют физические параметры в нормированные электрические
Для измерения используют преобразователи, которые преобразуют физические параметры в нормированные электрические
Функции телемеханики
Телесигнализация – получение информации о состоянии контролируемых и управляемых объектов,
Функции телемеханики
Телесигнализация – получение информации о состоянии контролируемых и управляемых объектов,
Для получения данных объект оснащают датчиками. Контроллер КП опрашивает состояние датчиков
Для получения данных объект оснащают датчиками. Контроллер КП опрашивает состояние датчиков
Функции телемеханики
Телеуправление – управление положением или состоянием дискретных объектов и объектов
Функции телемеханики
Телеуправление – управление положением или состоянием дискретных объектов и объектов
Управление начинается с выдачи оператором (диспетчером) команды телеуправления с ЭВМ или
Управление начинается с выдачи оператором (диспетчером) команды телеуправления с ЭВМ или
Контроллер КП, получив команду телеуправления, проверяет ее достоверность и выдает электрический
Контроллер КП, получив команду телеуправления, проверяет ее достоверность и выдает электрический
Функции телемеханики
Телерегулирование - обеспечивает дистанционное задание уровня воздействия на объект управления.
Функции телемеханики
Телерегулирование - обеспечивает дистанционное задание уровня воздействия на объект управления.
Управление начинается с задания оператором величины воздействия и выдачей команды с
Управление начинается с задания оператором величины воздействия и выдачей команды с
Система телемеханики структурно подразделяется на 2 уровня:
- верхний уровень
Система телемеханики структурно подразделяется на 2 уровня:
- верхний уровень
Верхний уровень (ПУ) представляет собой комплекс программно - технических средств и
Верхний уровень (ПУ) представляет собой комплекс программно - технических средств и
Контроль и управление системой осуществляют с Пункта Управления (ПУ), где находится
Контроль и управление системой осуществляют с Пункта Управления (ПУ), где находится
Нижний уровень состоит из Контролируемых Пунктов (КП) территориально распределенных в соответствии
Нижний уровень состоит из Контролируемых Пунктов (КП) территориально распределенных в соответствии
Объекты контроля и управления находятся на Контролируемых Пунктах (КП), одном или
Объекты контроля и управления находятся на Контролируемых Пунктах (КП), одном или
Контролируемый пункт (КП) – предназначен для:
- сбора, преобразования и передачи
Контролируемый пункт (КП) – предназначен для:
- сбора, преобразования и передачи
Контролируемый пункт (КП) – предназначен для:
- идентификации и формирования команд
Контролируемый пункт (КП) – предназначен для:
- идентификации и формирования команд
Контролируемый пункт (КП) –
предназначен для:
- сигнализации положения, состояния и
Контролируемый пункт (КП) –
предназначен для:
- сигнализации положения, состояния и
Взаимодействие между ПУ и КП происходит по каналу связи:
кабельная линия;
оптоволоконная линия;
выделенный
Взаимодействие между ПУ и КП происходит по каналу связи:
кабельная линия;
оптоволоконная линия;
выделенный
Данные между ПУ и КП передают короткими массивами, которые называют кадрами,
Данные между ПУ и КП передают короткими массивами, которые называют кадрами,
Адрес должен однозначно идентифицировать измеряемый параметр в рамках всей системы, например,
Адрес должен однозначно идентифицировать измеряемый параметр в рамках всей системы, например,
Способ кодирования данных и порядок обмена посылками называют протоколом обмена. Одним
Способ кодирования данных и порядок обмена посылками называют протоколом обмена. Одним
Работа системы телемеханики
Информация от датчиков КП в виде нормированных электрических сигналов
Работа системы телемеханики
Информация от датчиков КП в виде нормированных электрических сигналов
При необходимости вмешательства в ход контролируемого процесса оператор выдает в систему
При необходимости вмешательства в ход контролируемого процесса оператор выдает в систему
 Характеристика топливно-энергетической базы Крыма
Характеристика топливно-энергетической базы Крыма Вред курения
Вред курения Презентация. Летний оздоровительный лагерь.
Презентация. Летний оздоровительный лагерь. Анализ динамики экономических показателей России и США
Анализ динамики экономических показателей России и США Биосфера. Среды жизни
Биосфера. Среды жизни Аллергия. Аллергены
Аллергия. Аллергены Презентация Заповеди Блаженствпо предмету ОПК
Презентация Заповеди Блаженствпо предмету ОПК Облік, контроль і аналіз непрямих виробничих витрат
Облік, контроль і аналіз непрямих виробничих витрат Конспект внеклассного занятия на тему: Законы жизни класса.
Конспект внеклассного занятия на тему: Законы жизни класса. Внутренние воды РТ
Внутренние воды РТ Формирование культурной среды небольшого города/села
Формирование культурной среды небольшого города/села аналогічні-гомологічні органи
аналогічні-гомологічні органи Организаторская и воспитательная работа командира подразделения по укреплению воинской дисциплины. Тема № 5
Организаторская и воспитательная работа командира подразделения по укреплению воинской дисциплины. Тема № 5 О мерах по поддержки генерирующих объектов на основе ВИЭ. Законодательная база поддержки генерации ВИЭ
О мерах по поддержки генерирующих объектов на основе ВИЭ. Законодательная база поддержки генерации ВИЭ Интернет в жизни старшеклассника: за или против
Интернет в жизни старшеклассника: за или против Тольятти. История любимого города
Тольятти. История любимого города Пейзаж — поэтичная и музыкальная живопись
Пейзаж — поэтичная и музыкальная живопись Особенности рельефа территории России
Особенности рельефа территории России Направления реализации Национальной стратегии по обращению с ТКО и ВМР
Направления реализации Национальной стратегии по обращению с ТКО и ВМР ФЭМП 14.04.2020
ФЭМП 14.04.2020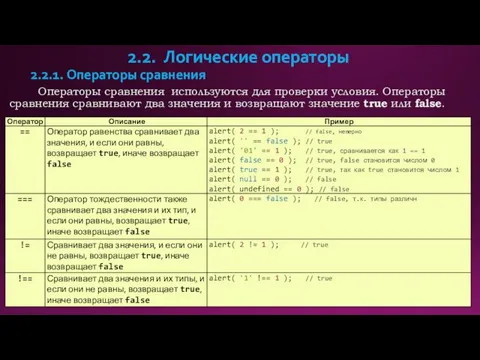 Логические операторы
Логические операторы Обрезка яблони и груши
Обрезка яблони и груши Проектирование современного урока биологии, географии в соответствии с требованиями ФГОС
Проектирование современного урока биологии, географии в соответствии с требованиями ФГОС Правовое регулирование предпринимательской деятельности
Правовое регулирование предпринимательской деятельности Презентация для детей
Презентация для детей Миотоническая дистрофия Россолимо-Штейнерта-Куршманна-Баттена
Миотоническая дистрофия Россолимо-Штейнерта-Куршманна-Баттена Плотность
Плотность Праздники и календари. Основы мировых религиозных наук (4 класс)
Праздники и календари. Основы мировых религиозных наук (4 класс)