Основы теории автоматического управления. Передаточные функции и уравнения замкнутой системы. Лекция 10 презентация
- Основы теории автоматического управления. Передаточные функции и уравнения замкнутой системы. Лекция 10

Содержание
- 2. Литература
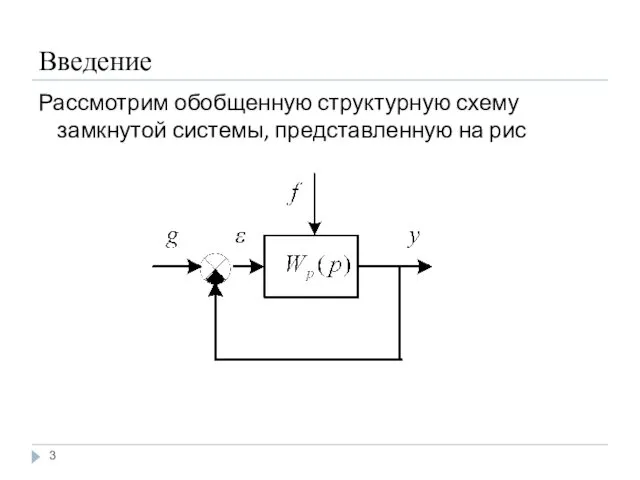
- 3. Введение Рассмотрим обобщенную структурную схему замкнутой системы, представленную на рис
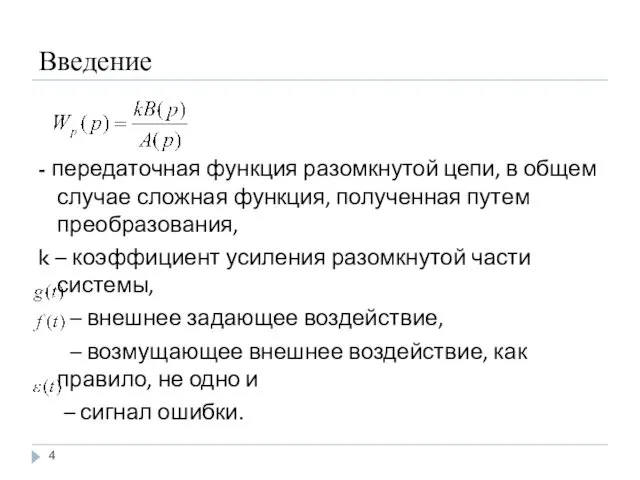
- 4. Введение - передаточная функция разомкнутой цепи, в общем случае сложная функция, полученная путем преобразования, k –
- 5. Введение Отрицательная обратная связь между выходом и входом, называется главной ООС. Передаточные функции замкнутой системы записывается
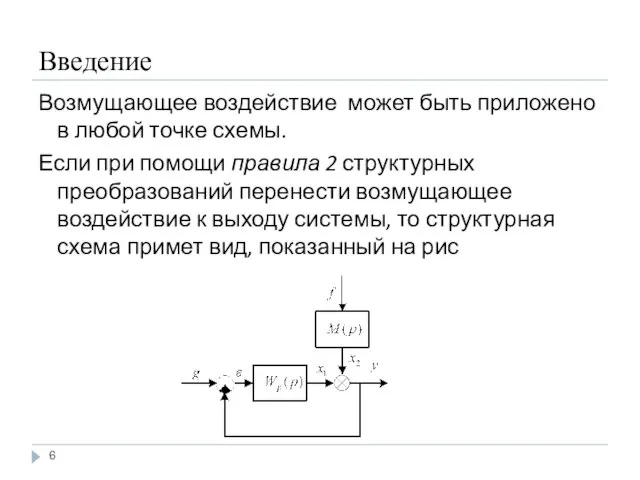
- 6. Введение Возмущающее воздействие может быть приложено в любой точке схемы. Если при помощи правила 2 структурных
- 7. Введение На выходе имеем условно хотя на самом деле входит в общую схему как часть
- 8. Введение Основные соотношения, описывающие динамику системы, в изображениях по Лапласу будут иметь вид
- 9. Введение В расчетах автоматических систем применяют три основных вида передаточных функций замкнутой системы. 1. Главная передаточная
- 10. Введение Откуда
- 11. Введение 2. Передаточная функция замкнутой системы для ошибки по задающему воздействию
- 12. Введение 3. Передаточная функция замкнутой системы по возмущающему воздействию определяется при условии равенства нулю задающего воздействия
- 13. Введение Откуда 4. Передаточная функция для ошибки по возмущающему воздействию будет той же, что и для
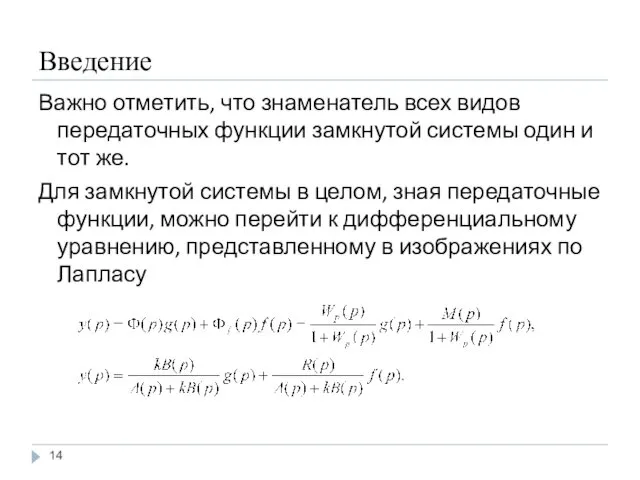
- 14. Введение Важно отметить, что знаменатель всех видов передаточных функции замкнутой системы один и тот же. Для
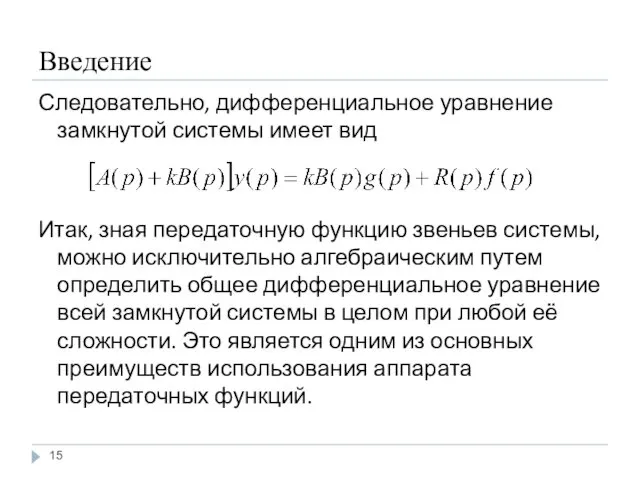
- 15. Введение Следовательно, дифференциальное уравнение замкнутой системы имеет вид Итак, зная передаточную функцию звеньев системы, можно исключительно
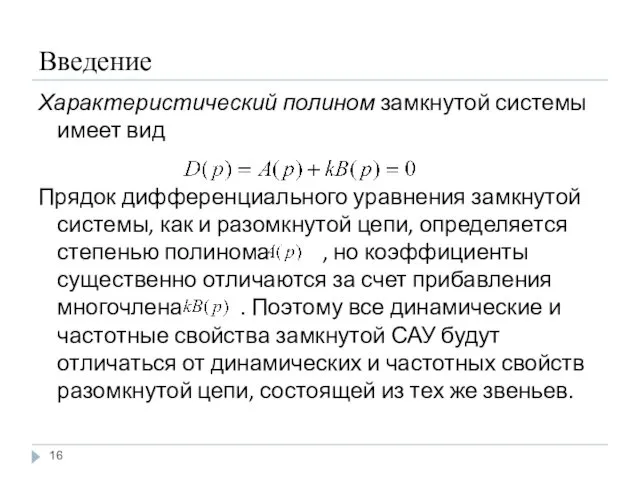
- 16. Введение Характеристический полином замкнутой системы имеет вид Прядок дифференциального уравнения замкнутой системы, как и разомкнутой цепи,
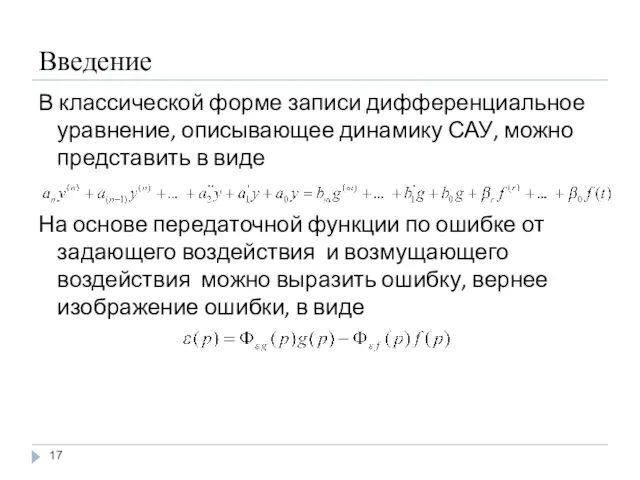
- 17. Введение В классической форме записи дифференциальное уравнение, описывающее динамику САУ, можно представить в виде На основе
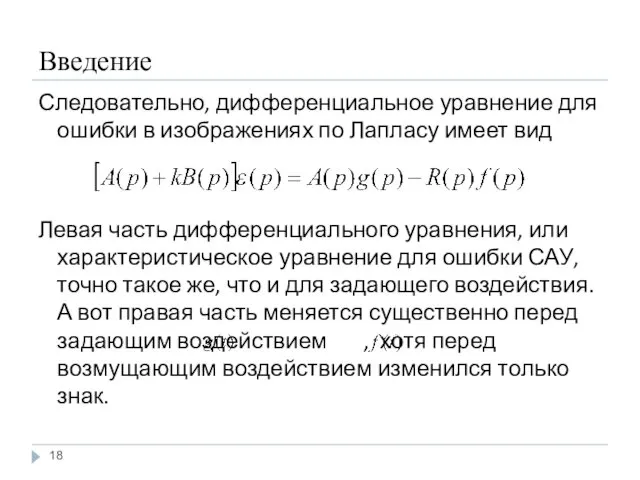
- 18. Введение Следовательно, дифференциальное уравнение для ошибки в изображениях по Лапласу имеет вид Левая часть дифференциального уравнения,
- 19. Введение Физический смысл рассмотренной динамической модели таков: все изменения регулируемой величины под влиянием возмущающего воздействия сказываются
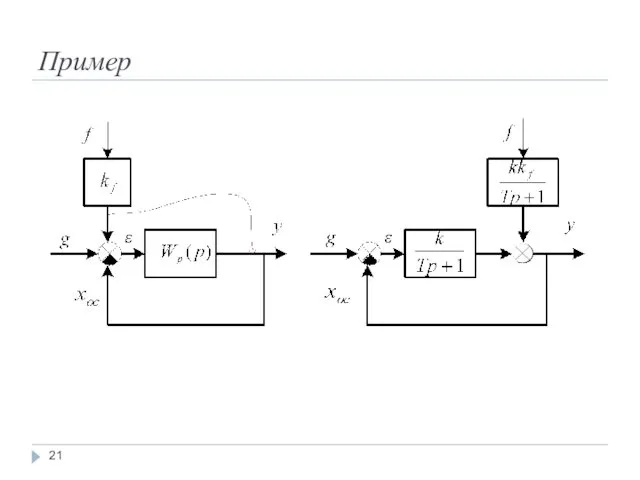
- 20. Пример Пример вывода различных передаточных функций и дифференциальных уравнений для САУ первого порядка. На рис. приведены
- 21. Пример
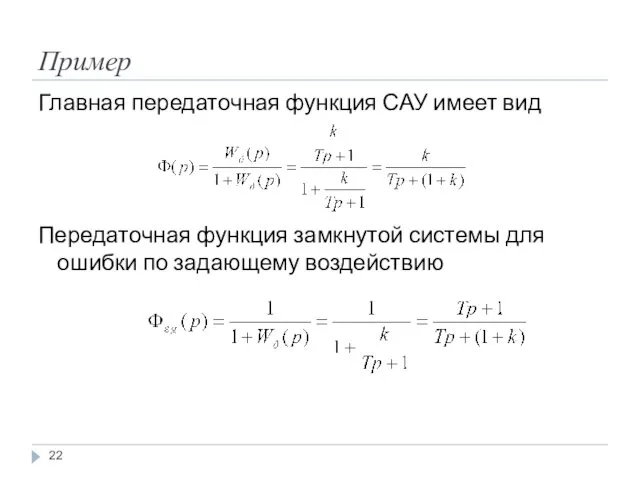
- 22. Пример Главная передаточная функция САУ имеет вид Передаточная функция замкнутой системы для ошибки по задающему воздействию
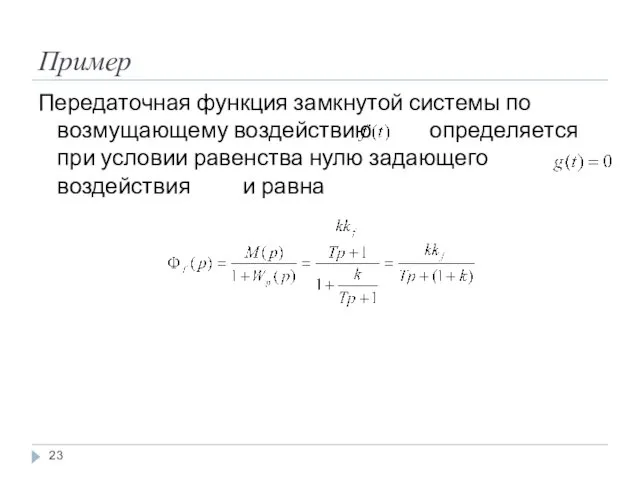
- 23. Пример Передаточная функция замкнутой системы по возмущающему воздействию определяется при условии равенства нулю задающего воздействия и
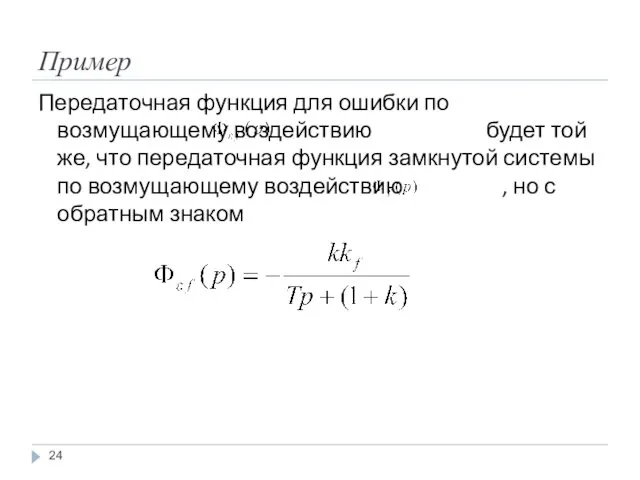
- 24. Пример Передаточная функция для ошибки по возмущающему воздействию будет той же, что передаточная функция замкнутой системы
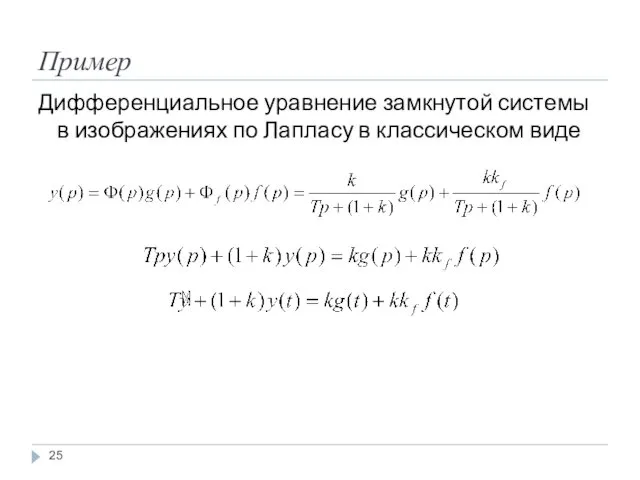
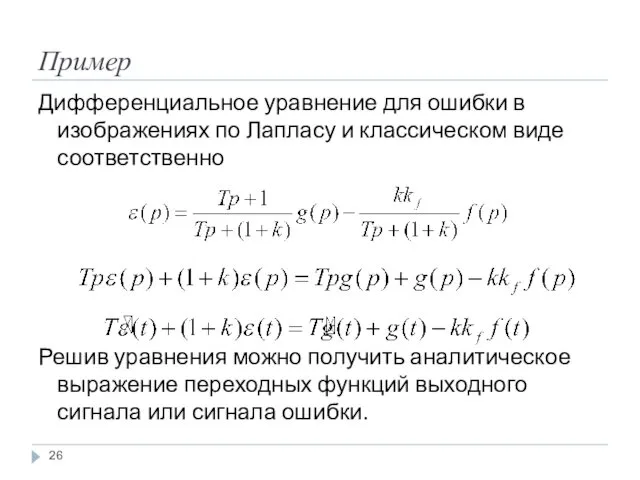
- 25. Пример Дифференциальное уравнение замкнутой системы в изображениях по Лапласу в классическом виде
- 26. Пример Дифференциальное уравнение для ошибки в изображениях по Лапласу и классическом виде соответственно Решив уравнения можно
- 28. Скачать презентацию
Литература
Литература
Введение
Рассмотрим обобщенную структурную схему замкнутой системы, представленную на рис
Введение
Рассмотрим обобщенную структурную схему замкнутой системы, представленную на рис
Введение
- передаточная функция разомкнутой цепи, в общем случае сложная функция, полученная
Введение
- передаточная функция разомкнутой цепи, в общем случае сложная функция, полученная
Введение
Отрицательная обратная связь между выходом и входом, называется главной ООС.
Передаточные
Введение
Отрицательная обратная связь между выходом и входом, называется главной ООС.
Передаточные
Введение
Возмущающее воздействие может быть приложено в любой точке схемы.
Если при
Введение
Возмущающее воздействие может быть приложено в любой точке схемы.
Если при
Введение
На выходе имеем условно
хотя на самом деле
входит в общую схему
Введение
На выходе имеем условно
хотя на самом деле
входит в общую схему
Введение
Основные соотношения, описывающие динамику системы, в изображениях по Лапласу будут иметь
Введение
Основные соотношения, описывающие динамику системы, в изображениях по Лапласу будут иметь
Введение
В расчетах автоматических систем применяют три основных вида передаточных функций замкнутой
Введение
В расчетах автоматических систем применяют три основных вида передаточных функций замкнутой
Введение
Откуда
Введение
Откуда
Введение
2. Передаточная функция замкнутой системы для ошибки по задающему воздействию
Введение
2. Передаточная функция замкнутой системы для ошибки по задающему воздействию
Введение
3. Передаточная функция замкнутой системы по возмущающему воздействию определяется при условии
Введение
3. Передаточная функция замкнутой системы по возмущающему воздействию определяется при условии
Введение
Откуда
4. Передаточная функция для ошибки по возмущающему воздействию
будет той же,
Введение
Откуда
4. Передаточная функция для ошибки по возмущающему воздействию
будет той же,
Введение
Важно отметить, что знаменатель всех видов передаточных функции замкнутой системы один
Введение
Важно отметить, что знаменатель всех видов передаточных функции замкнутой системы один
Введение
Следовательно, дифференциальное уравнение замкнутой системы имеет вид
Итак, зная передаточную функцию звеньев
Введение
Следовательно, дифференциальное уравнение замкнутой системы имеет вид
Итак, зная передаточную функцию звеньев
Введение
Характеристический полином замкнутой системы имеет вид
Прядок дифференциального уравнения замкнутой системы, как
Введение
Характеристический полином замкнутой системы имеет вид
Прядок дифференциального уравнения замкнутой системы, как
Введение
В классической форме записи дифференциальное уравнение, описывающее динамику САУ, можно представить
Введение
В классической форме записи дифференциальное уравнение, описывающее динамику САУ, можно представить
Введение
Следовательно, дифференциальное уравнение для ошибки в изображениях по Лапласу имеет вид
Левая
Введение
Следовательно, дифференциальное уравнение для ошибки в изображениях по Лапласу имеет вид
Левая
Введение
Физический смысл рассмотренной динамической модели таков: все изменения регулируемой величины под
Введение
Физический смысл рассмотренной динамической модели таков: все изменения регулируемой величины под
Пример
Пример вывода различных передаточных функций и дифференциальных уравнений для САУ первого
Пример
Пример вывода различных передаточных функций и дифференциальных уравнений для САУ первого
Пример
Пример
Пример
Главная передаточная функция САУ имеет вид
Передаточная функция замкнутой системы для ошибки
Пример
Главная передаточная функция САУ имеет вид
Передаточная функция замкнутой системы для ошибки
Пример
Передаточная функция замкнутой системы по возмущающему воздействию определяется при условии равенства
Пример
Передаточная функция замкнутой системы по возмущающему воздействию определяется при условии равенства
Пример
Передаточная функция для ошибки по возмущающему воздействию будет той же, что
Пример
Передаточная функция для ошибки по возмущающему воздействию будет той же, что
Пример
Дифференциальное уравнение замкнутой системы в изображениях по Лапласу в классическом виде
Пример
Дифференциальное уравнение замкнутой системы в изображениях по Лапласу в классическом виде
Пример
Дифференциальное уравнение для ошибки в изображениях по Лапласу и классическом виде
Пример
Дифференциальное уравнение для ошибки в изображениях по Лапласу и классическом виде
 Тяговая, контактная, рельсовая сеть
Тяговая, контактная, рельсовая сеть Задания Всероссийской олимпиады по экологии
Задания Всероссийской олимпиады по экологии ВКР: Повышение эффективности перевозки щебня
ВКР: Повышение эффективности перевозки щебня Презентация Все профессии нужны, все профессии важны
Презентация Все профессии нужны, все профессии важны Презентация В гостях у сказки ( загадки по русским народным сказкам)
Презентация В гостях у сказки ( загадки по русским народным сказкам) Круїз-контроль в автомобілі
Круїз-контроль в автомобілі Технологии уборки культурных растений
Технологии уборки культурных растений Устройство формирования импульсных сигналов управления с регулируемыми коэффициентом заполнения и частотой модуляции
Устройство формирования импульсных сигналов управления с регулируемыми коэффициентом заполнения и частотой модуляции Тайна имени Илья
Тайна имени Илья Презентация по химии по теме Элементы таблицы Менделеева (таблица и ученые)
Презентация по химии по теме Элементы таблицы Менделеева (таблица и ученые) Методы синтеза и анализа цифровых фильтров. БИХ-фильтры. Методы аппроксимации АЧХ и метод ИИХ
Методы синтеза и анализа цифровых фильтров. БИХ-фильтры. Методы аппроксимации АЧХ и метод ИИХ Мысль семейная в романе Война и мир
Мысль семейная в романе Война и мир Образовательные возможности информационных технологий
Образовательные возможности информационных технологий Первые полеты в космос. Белка и Стрелка
Первые полеты в космос. Белка и Стрелка Лесная промышленность России
Лесная промышленность России Невская битва в Ледовое побоище
Невская битва в Ледовое побоище Писанка 5 клас
Писанка 5 клас Климат Московского столичного региона (МСР)
Климат Московского столичного региона (МСР) как размножаются животные
как размножаются животные Возникновение геометрии
Возникновение геометрии Немецкая овчарка
Немецкая овчарка Электронная презентация для уроков географии в 6 классе коррекционной школы VIII вида Наблюдения за изменением высоты солнца и погоды
Электронная презентация для уроков географии в 6 классе коррекционной школы VIII вида Наблюдения за изменением высоты солнца и погоды My cafe_Кузовкова
My cafe_Кузовкова Основные определения технологического процесса
Основные определения технологического процесса Презентация Декларация прав человека для классного часа в 1-2 классе (часть1)
Презентация Декларация прав человека для классного часа в 1-2 классе (часть1) Рациональное питание
Рациональное питание Интерфейс USB
Интерфейс USB Інформаційно-комунікаційна компетентність вчителя
Інформаційно-комунікаційна компетентність вчителя