- Основы теории систем автоматического управления

Содержание
- 2. 1. Основные определения и понятия Управление - целенаправленное воздействие на некоторый объект (автомобиль, станок, атомный реактор,
- 3. Автоматизированное управление – управление с участием человека (чем сложнее объект управления, тем сложнее полностью исключить человека
- 4. Магистральная линия развития НТП
- 5. 2. Структурная схема САУ – графическое представление элементов САУ и связей между ними. 8
- 6. 1-7- элементы САУ с их математическими моделями. 8-сравнивающий элемент (измеритель рассогласования) ε (t) =X(t)-Y(t) U1-U10 -
- 7. 3. Основные задачи ТАУ
- 8. 4. Преобразование по Лапласу – исключительно широко использовано в ТАУ. Если X (t) - оригинал, а
- 9. 5. Передаточная функция W(s) – элемента – это отношение преобразования по Лапласу от выходной величины к
- 10. Передаточная функция W(s) – САУ – управляющее воздействие формируется с учетом сравнения отклонения y(s) от заданного
- 11. Различают W(s) САУ: разомкнутой (при размыкании обратной связи): замкнутой по входу-выходу:
- 12. замкнутой по ошибке: В любых случаях понятие передаточной функции справедливо лишь при нулевых начальных условиях
- 13. Перед исследованиями САУ следует «свернуть» к такому расчетному виду:
- 14. а) статические характеристики: это зависимости “вход-выход” в статическом режиме. Характеристики и элементы САУ Y
- 15. Пример - хорошо известные экономические кривые «спроса» и «предложения» в рыночной экономике Кривая “предложения’ Кривая “спроса”
- 16. б) Временные характеристики САУ – это реакции системы на типовые входные воздействия.
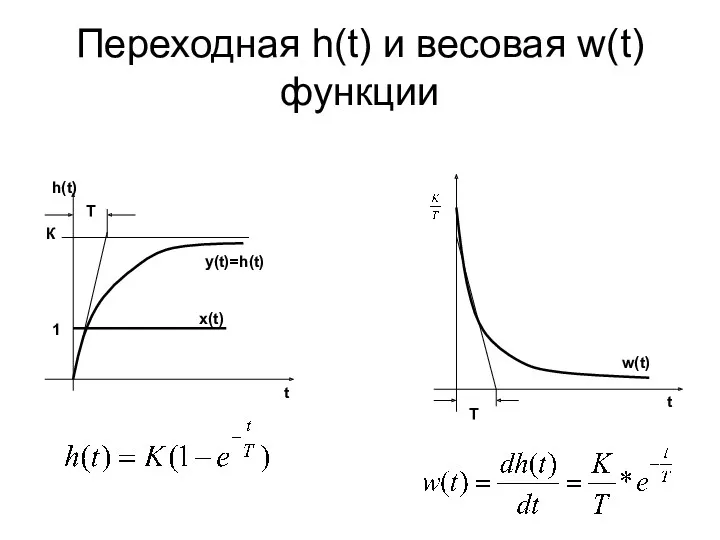
- 17. Переходная функция h(t) – это реакция системы на единичное ступенчатое входное воздействие. По h(t) САУ оценивают:
- 18. Весовая функция ω(t) – это реакция системы на входное воздействие типа дельта функции (функции Дирака). δ(t)
- 19. Взаимосвязь между ω(t) и h(t):
- 20. в) Частотные характеристики элементов и САУ это формулы и графики показывающие прохождение гармонических сигналов через элементы
- 21. * амплитудно-фазовая частотная характеристика (АФЧХ). Элемент (САУ) ω Ау Y φ Х Ах ω х=Ах*sin ωt
- 22. Im Re φ1 φ2 ω1 ωz ωn φn V(ω) A1 U(ω) A2
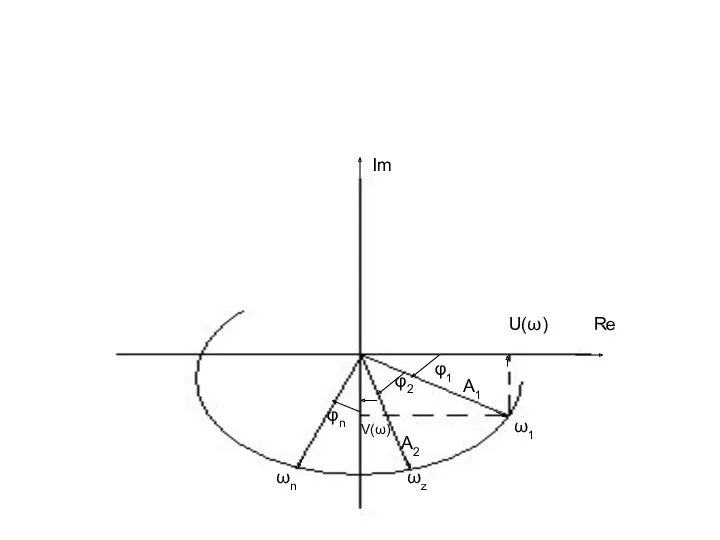
- 23. АФЧХ – годограф описываемый на комплексной плоскости концом вектора с модулем: при изменении частоты 0 А(ω)еjφ(ω)
- 24. * амплитудно-частотная характеристика – это зависимость А(ω), при 0 А(ω) ω 0 при 0
- 25. * фазо-частотная характеристика – это зависимость фазового сдвига φ(ω) между входным и выходным гармоническими сигналами элемента
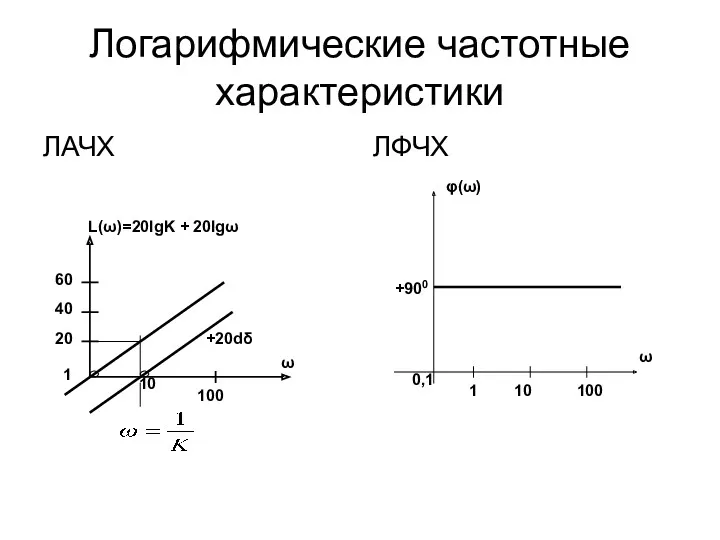
- 26. г) Логарифмические частотные характеристики – это формулы и графики, показывающие прохождение гармонических сигналов через элементы и
- 27. Различают логарифмические характеристики Амплитудную (ЛАЧХ) – это
- 28. фазовая (ЛФЧХ)
- 29. д) Алгебра передаточных функций – совокупность правил, позволяющих “сворачивать” структурные схемы САУ. Последовательное соединение звеньев т.е.
- 30. Параллельное соединение звеньев Таким образом при параллельном соединении звеньев передаточные функции складываются.
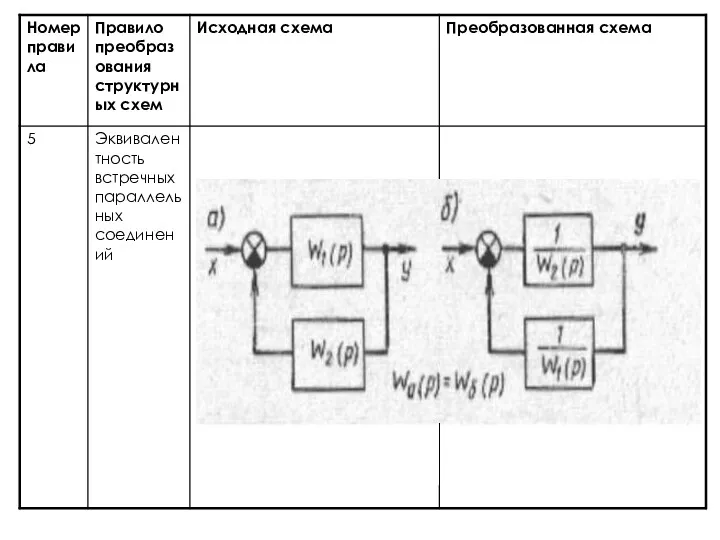
- 31. обратное соединение звеньев a) При положительной ОС “+”
- 32. б) При отрицательной ОС “-” Используя алгебру передаточных функций сложную САУ можно “свернуть” к простейшему следующему
- 33. Основные типы звеньев САУ 1. Идеальное усилительное (безинерцион-ное) звено Y = Kx w(s) = K w(iω)
- 34. 2.Апериодическое (инерционное) звено Передаточная функция АФЧХ – формально получается заменой s→jω:
- 35. АФЧХ
- 36. Амплитудно-частотная характеристика
- 37. Фазо-частотная характеристика – это arg
- 38. Логарифмическая амплитудно-частотная характеристика L(ω)=20lgA(ω)
- 39. Логарифмическая фазо-частотная характеристика
- 40. Переходная h(t) и весовая w(t) функции
- 41. 3. Идеальное интегрирующее звено
- 42. АФЧХ
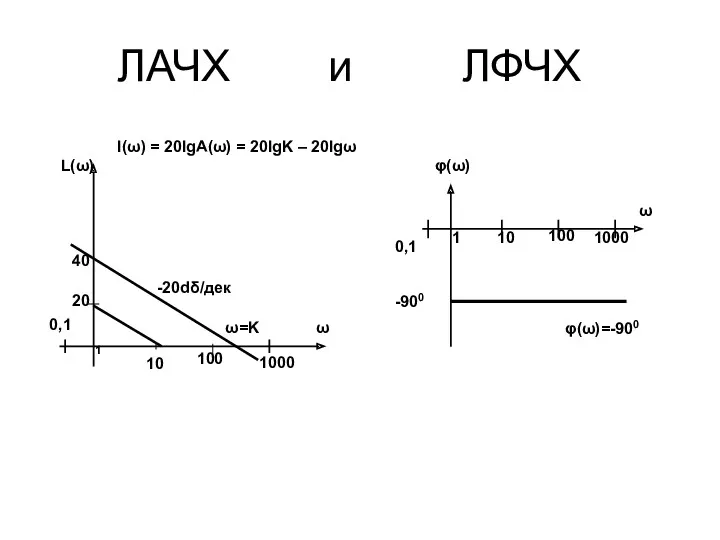
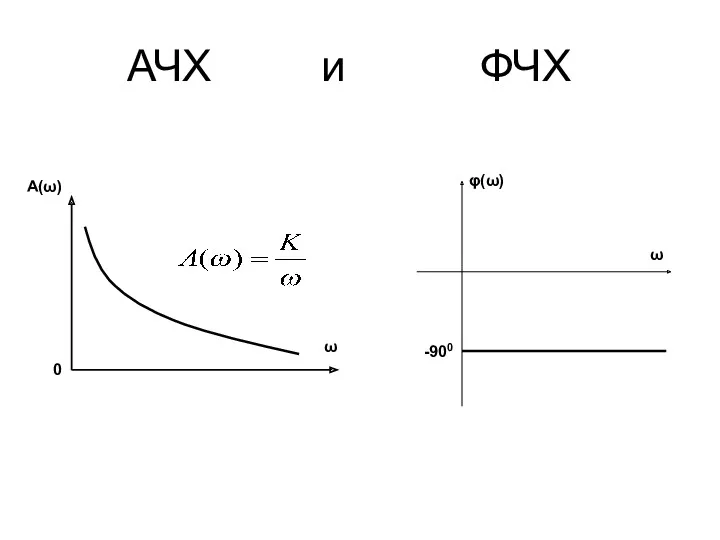
- 43. ЛАЧХ и ЛФЧХ l(ω) = 20lgA(ω) = 20lgK – 20lgω
- 44. АЧХ и ФЧХ
- 45. α tgα = K h(t) = kt x(t) h(t) 1 t Переходная h(t) и весовая w(t)
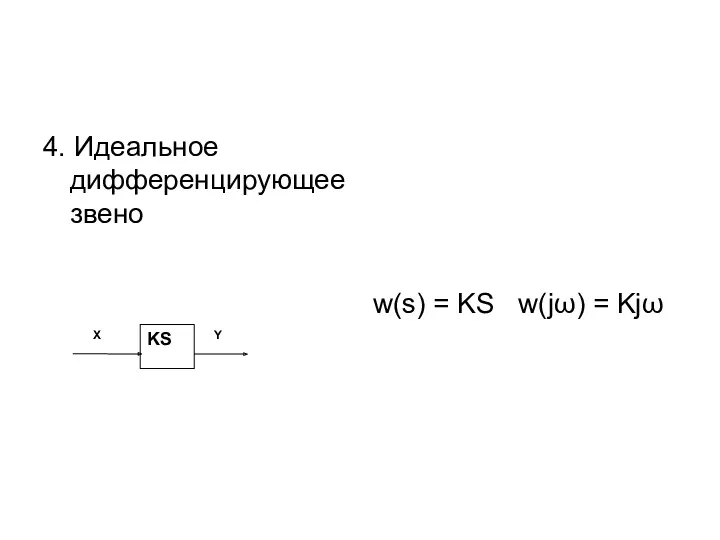
- 46. 4. Идеальное дифференцирующее звено w(s) = KS w(jω) = Kjω
- 47. АФЧХ и АЧХ
- 48. Логарифмические частотные характеристики ЛАЧХ ЛФЧХ
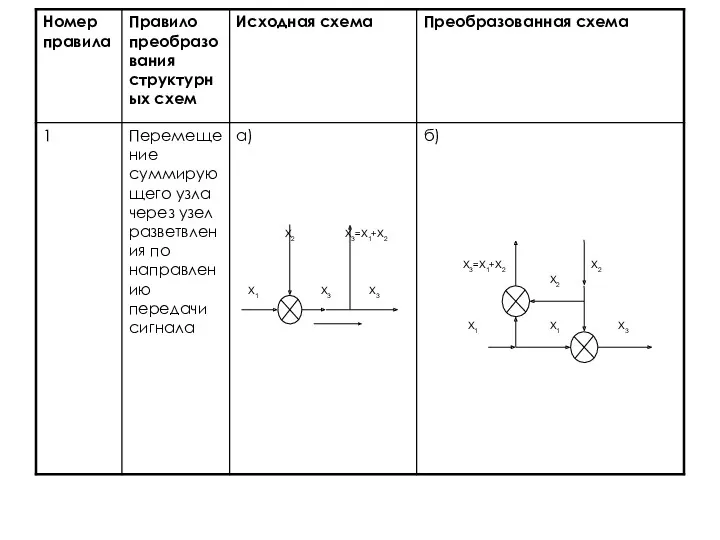
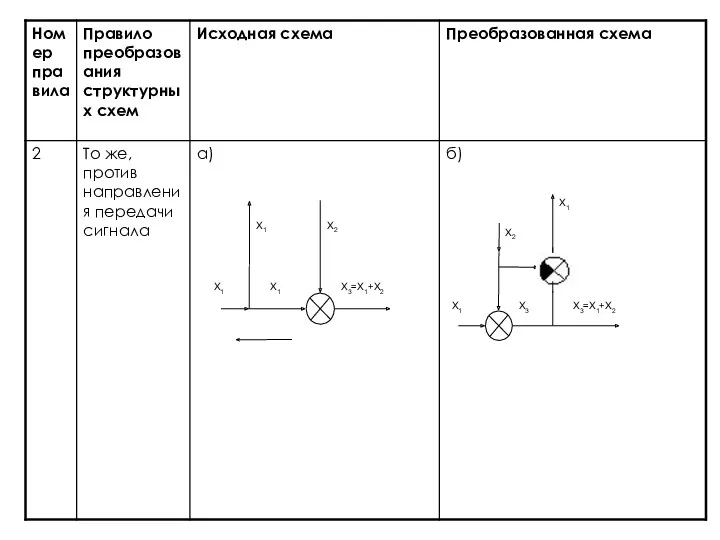
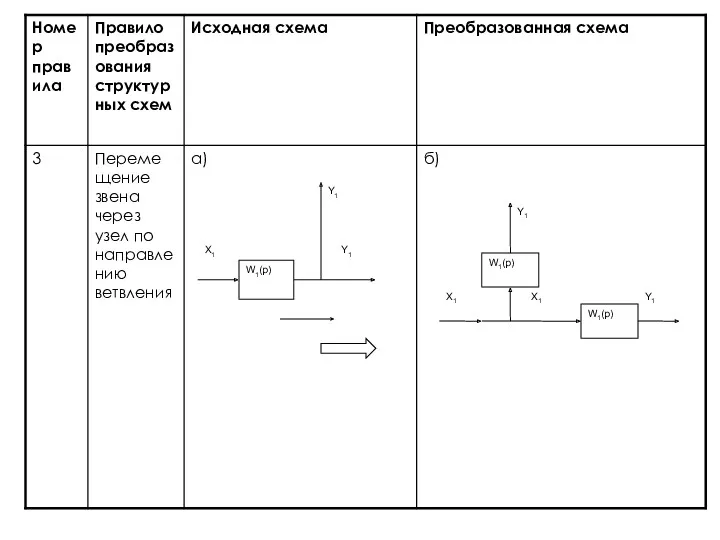
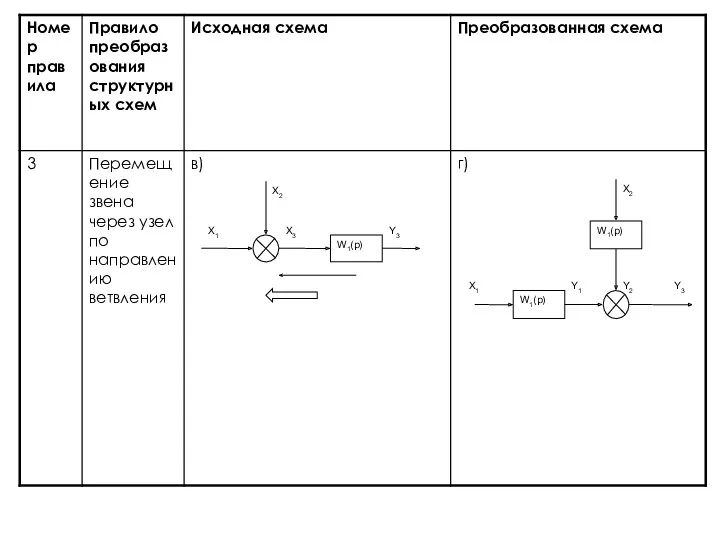
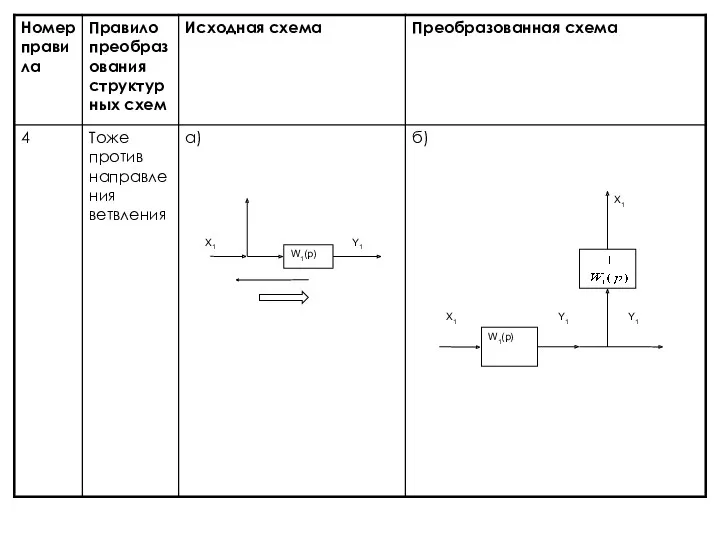
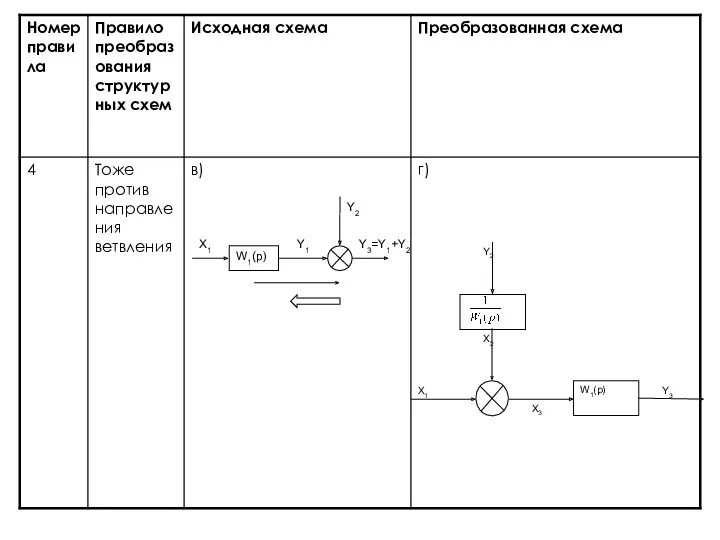
- 49. Правила преобразования структурных схем
- 58. wа = wδ
- 60. Скачать презентацию
1. Основные определения и понятия
Управление - целенаправленное воздействие на некоторый объект
1. Основные определения и понятия
Управление - целенаправленное воздействие на некоторый объект
Автоматизированное управление – управление с участием человека (чем сложнее объект управления,
Автоматизированное управление – управление с участием человека (чем сложнее объект управления,
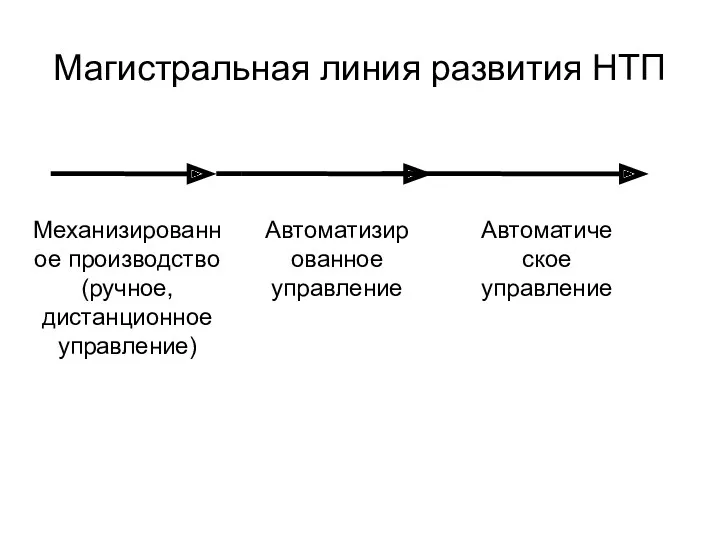
Магистральная линия развития НТП
Магистральная линия развития НТП
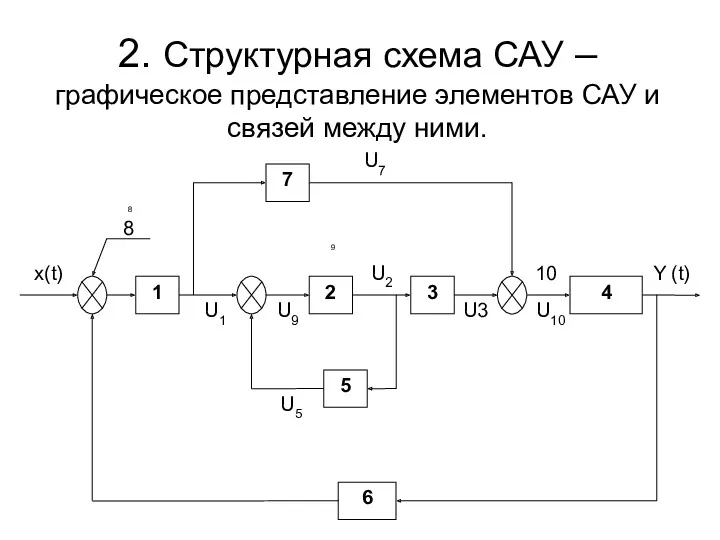
2. Структурная схема САУ – графическое представление элементов САУ и связей
2. Структурная схема САУ – графическое представление элементов САУ и связей
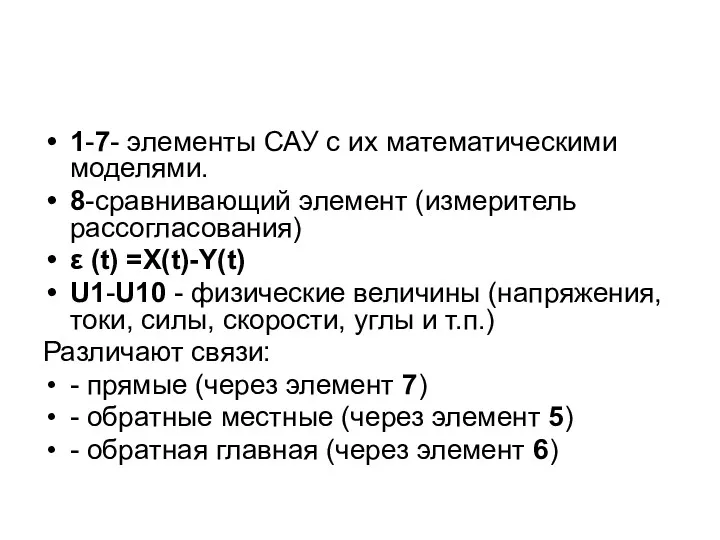
1-7- элементы САУ с их математическими моделями.
8-сравнивающий элемент (измеритель рассогласования)
ε (t)
1-7- элементы САУ с их математическими моделями.
8-сравнивающий элемент (измеритель рассогласования)
ε (t)
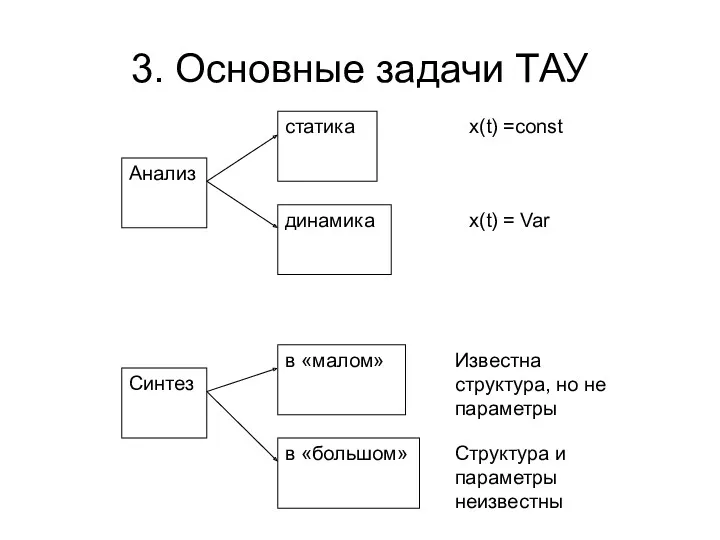
3. Основные задачи ТАУ
3. Основные задачи ТАУ
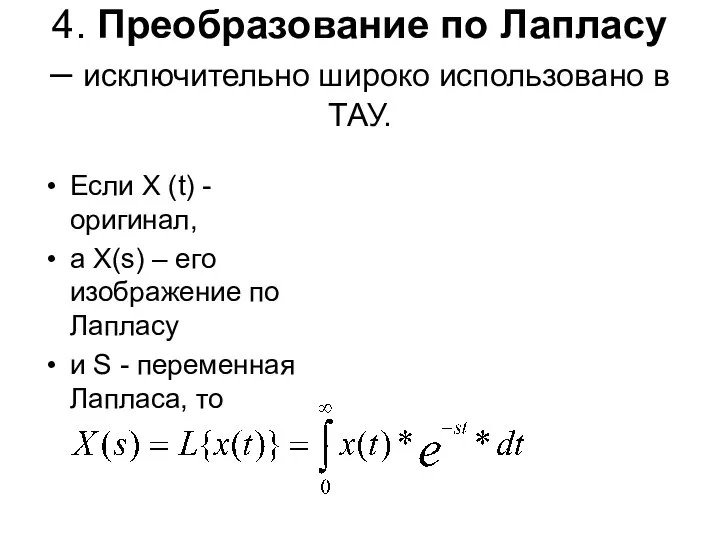
4. Преобразование по Лапласу – исключительно широко использовано в ТАУ.
Если X
4. Преобразование по Лапласу – исключительно широко использовано в ТАУ.
Если X
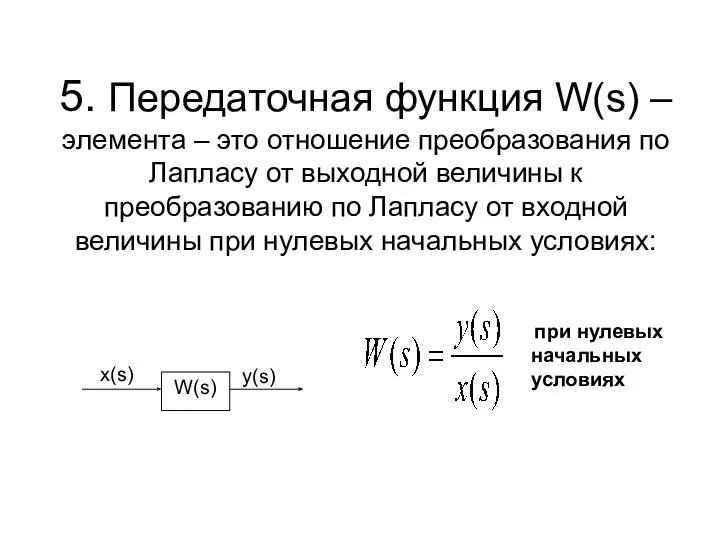
5. Передаточная функция W(s) – элемента – это отношение преобразования по
5. Передаточная функция W(s) – элемента – это отношение преобразования по

Передаточная функция W(s) – САУ – управляющее воздействие формируется с учетом
Передаточная функция W(s) – САУ – управляющее воздействие формируется с учетом
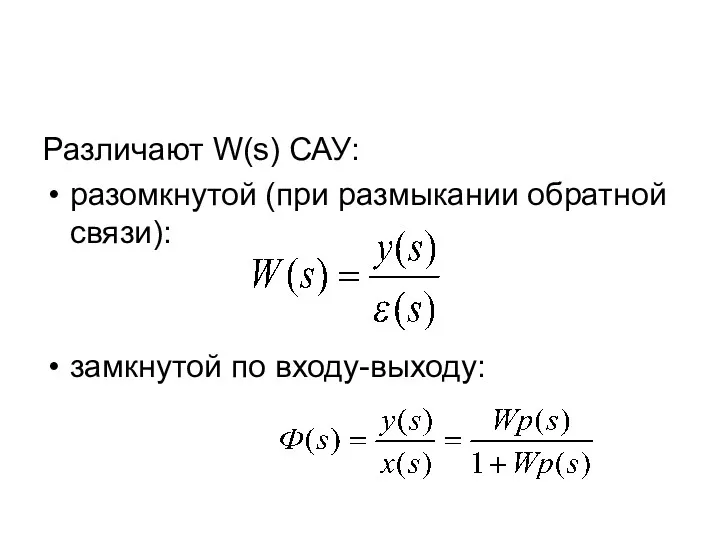
Различают W(s) САУ:
разомкнутой (при размыкании обратной связи):
замкнутой по входу-выходу:
Различают W(s) САУ:
разомкнутой (при размыкании обратной связи):
замкнутой по входу-выходу:
замкнутой по ошибке:
В любых случаях понятие передаточной функции справедливо лишь
замкнутой по ошибке:
В любых случаях понятие передаточной функции справедливо лишь
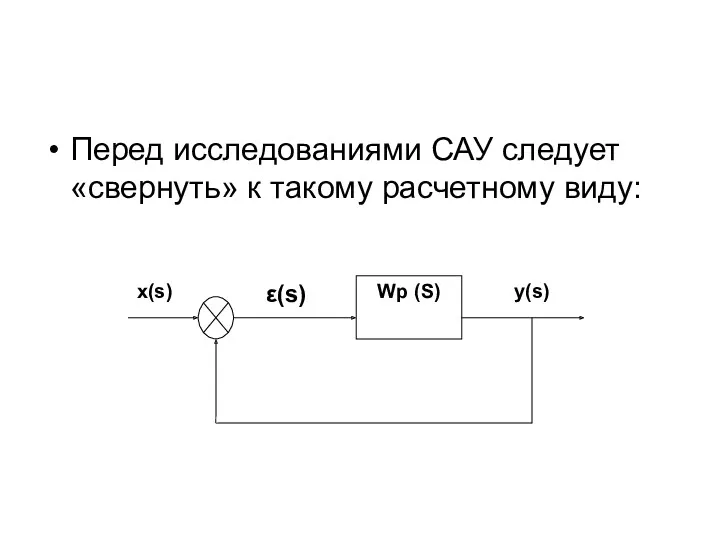
Перед исследованиями САУ следует «свернуть» к такому расчетному виду:
Перед исследованиями САУ следует «свернуть» к такому расчетному виду:
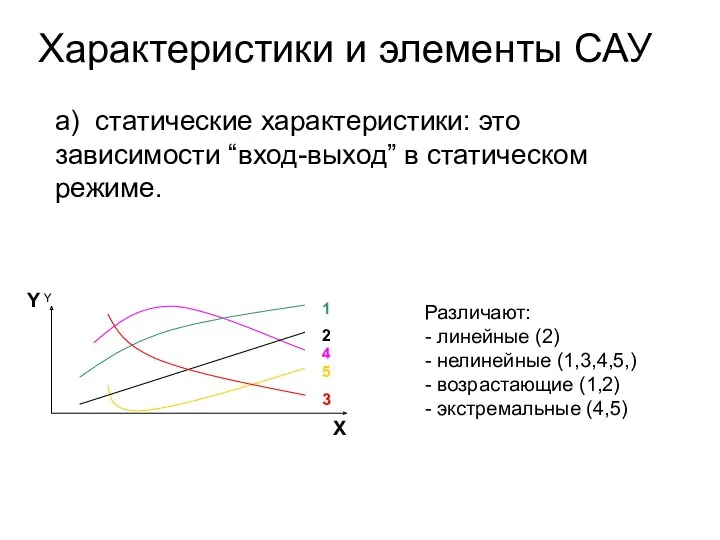
а) статические характеристики: это зависимости “вход-выход” в статическом режиме.
Характеристики и элементы
а) статические характеристики: это зависимости “вход-выход” в статическом режиме.
Характеристики и элементы
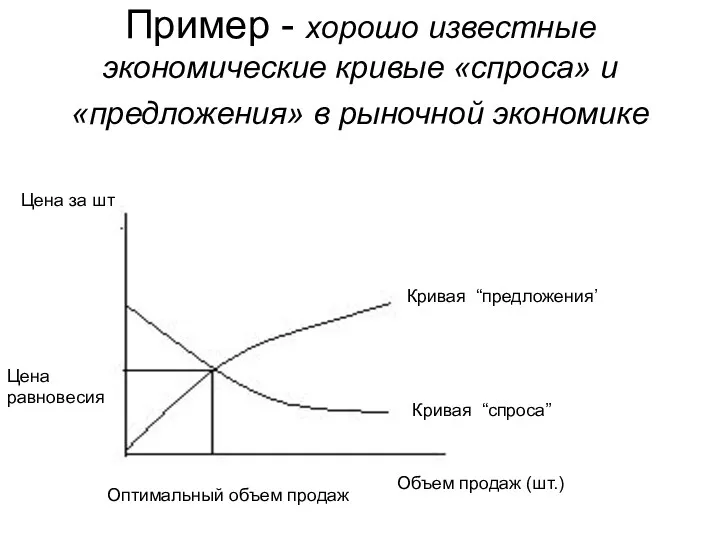
Пример - хорошо известные экономические кривые «спроса» и «предложения» в рыночной
Пример - хорошо известные экономические кривые «спроса» и «предложения» в рыночной
б) Временные характеристики САУ – это реакции системы на типовые входные
б) Временные характеристики САУ – это реакции системы на типовые входные
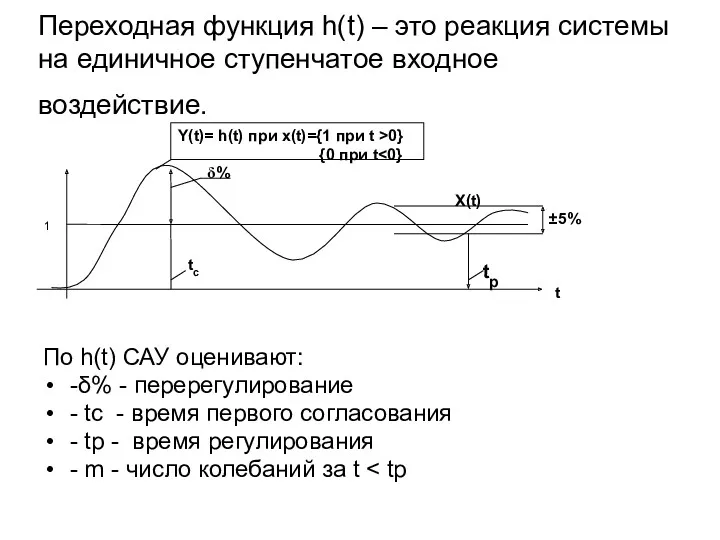
Переходная функция h(t) – это реакция системы на единичное ступенчатое входное
Переходная функция h(t) – это реакция системы на единичное ступенчатое входное
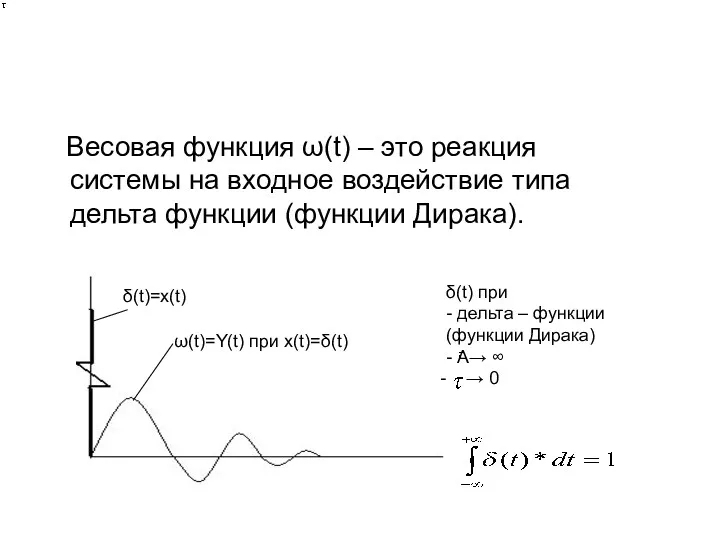
Весовая функция ω(t) – это реакция системы на входное воздействие
Весовая функция ω(t) – это реакция системы на входное воздействие
Взаимосвязь между ω(t) и h(t):
Взаимосвязь между ω(t) и h(t):
в) Частотные характеристики элементов и САУ
это формулы и графики показывающие
в) Частотные характеристики элементов и САУ
это формулы и графики показывающие
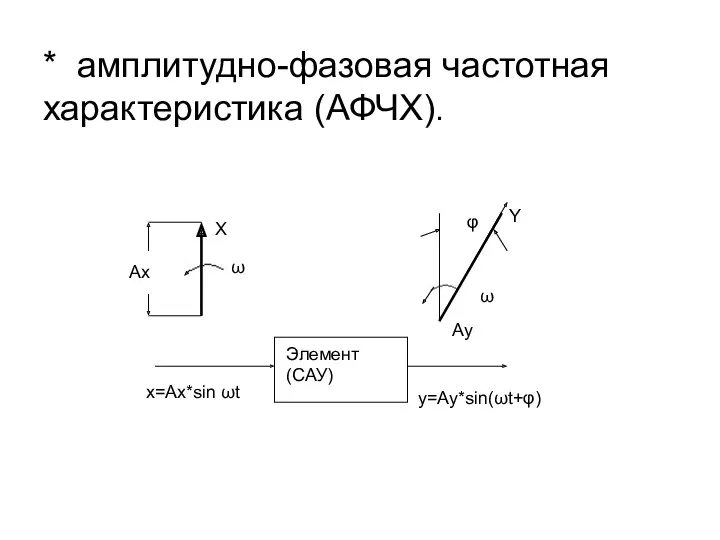
* амплитудно-фазовая частотная характеристика (АФЧХ).
Элемент
(САУ)
ω
Ау
Y
φ
Х
Ах
ω
х=Ах*sin ωt
y=Ay*sin(ωt+φ)
* амплитудно-фазовая частотная характеристика (АФЧХ).
Элемент
(САУ)
ω
Ау
Y
φ
Х
Ах
ω
х=Ах*sin ωt
y=Ay*sin(ωt+φ)
Im
Re
φ1
φ2
ω1
ωz
ωn
φn
V(ω)
A1
U(ω)
A2
Im
Re
φ1
φ2
ω1
ωz
ωn
φn
V(ω)
A1
U(ω)
A2
АФЧХ – годограф описываемый на комплексной плоскости концом вектора с модулем:
АФЧХ – годограф описываемый на комплексной плоскости концом вектора с модулем:
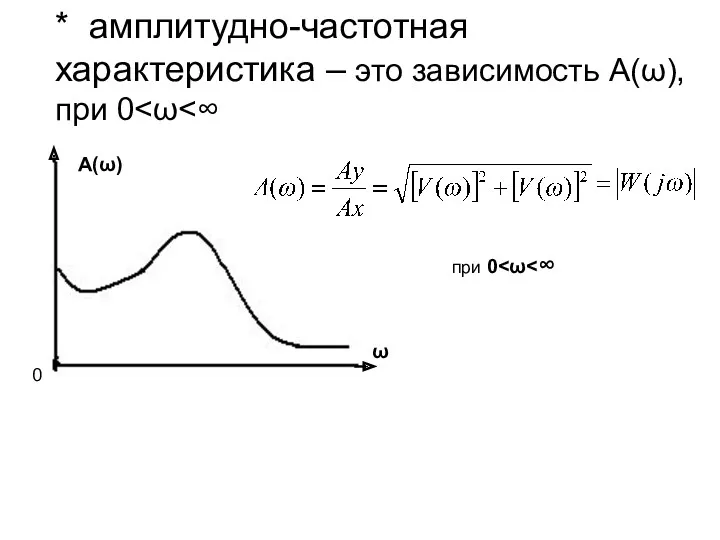
* амплитудно-частотная характеристика – это зависимость А(ω), при 0<ω<∞
А(ω)
ω
0
при 0<ω<∞
* амплитудно-частотная характеристика – это зависимость А(ω), при 0<ω<∞
А(ω)
ω
0
при 0<ω<∞
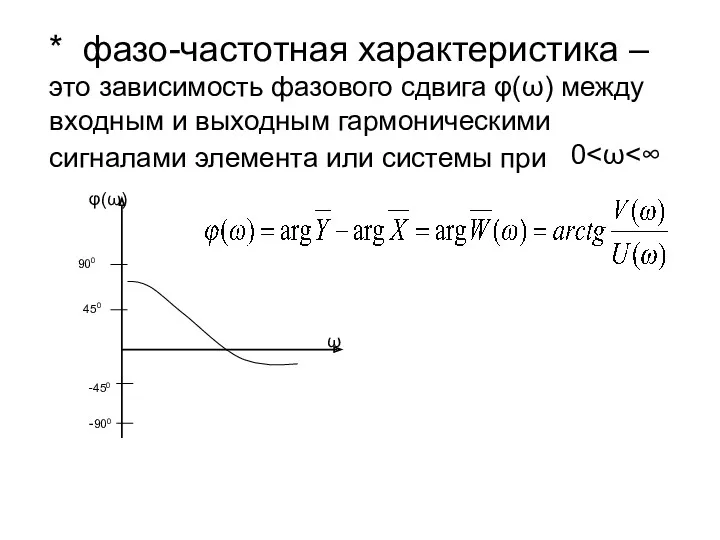
* фазо-частотная характеристика – это зависимость фазового сдвига φ(ω) между входным
* фазо-частотная характеристика – это зависимость фазового сдвига φ(ω) между входным
г) Логарифмические частотные характеристики – это формулы и графики, показывающие прохождение
г) Логарифмические частотные характеристики – это формулы и графики, показывающие прохождение
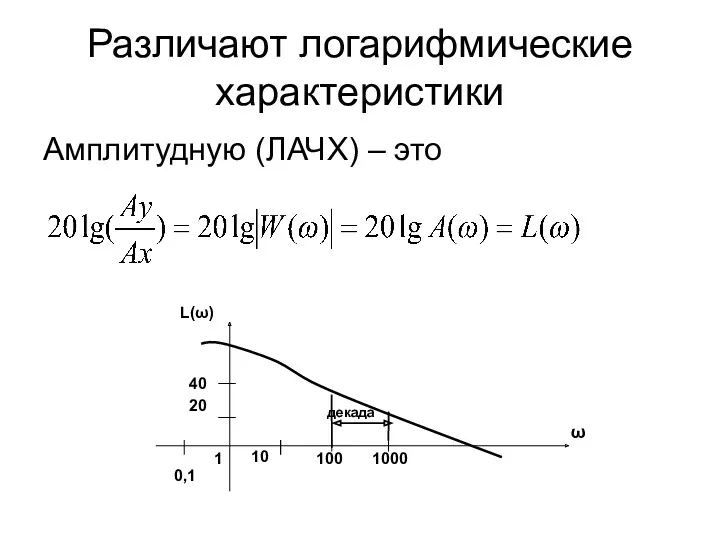
Различают логарифмические характеристики
Амплитудную (ЛАЧХ) – это
Различают логарифмические характеристики
Амплитудную (ЛАЧХ) – это
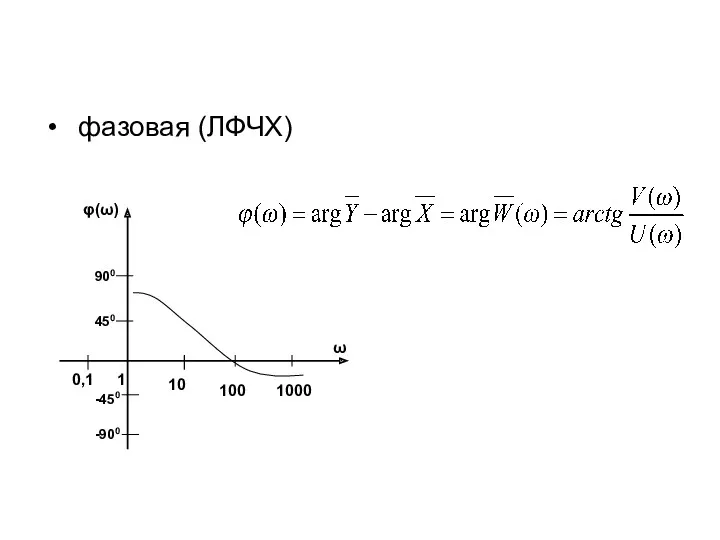
фазовая (ЛФЧХ)
фазовая (ЛФЧХ)
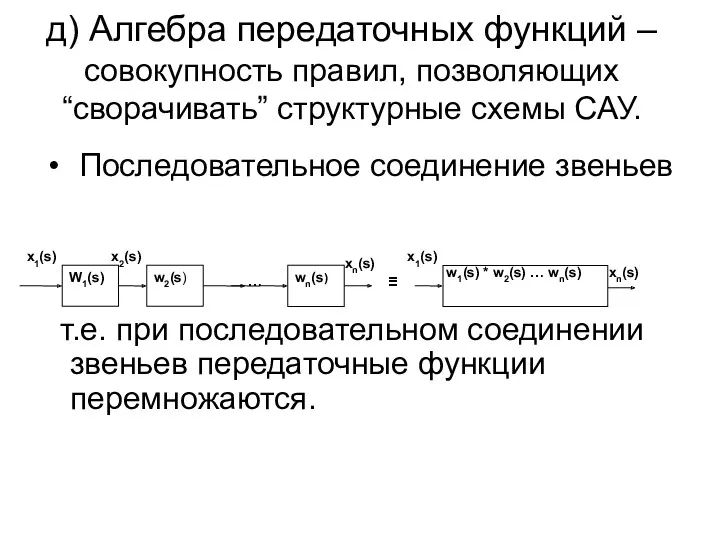
д) Алгебра передаточных функций – совокупность правил, позволяющих “сворачивать” структурные схемы
д) Алгебра передаточных функций – совокупность правил, позволяющих “сворачивать” структурные схемы
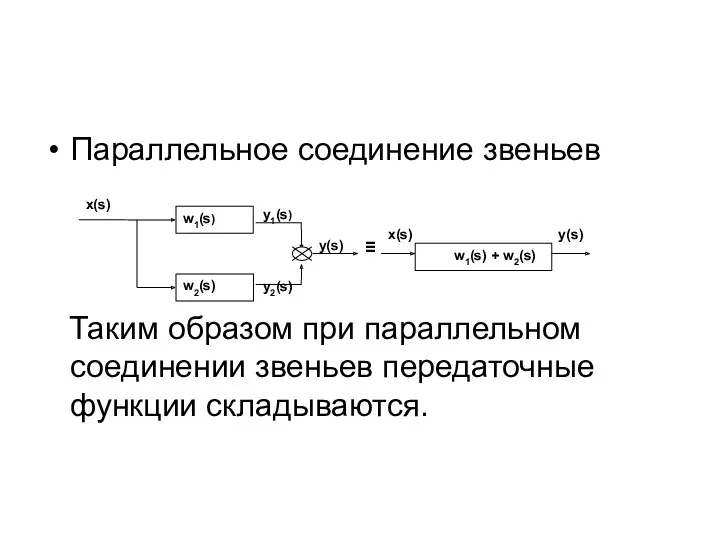
Параллельное соединение звеньев
Таким образом при параллельном соединении звеньев передаточные функции складываются.
Параллельное соединение звеньев
Таким образом при параллельном соединении звеньев передаточные функции складываются.
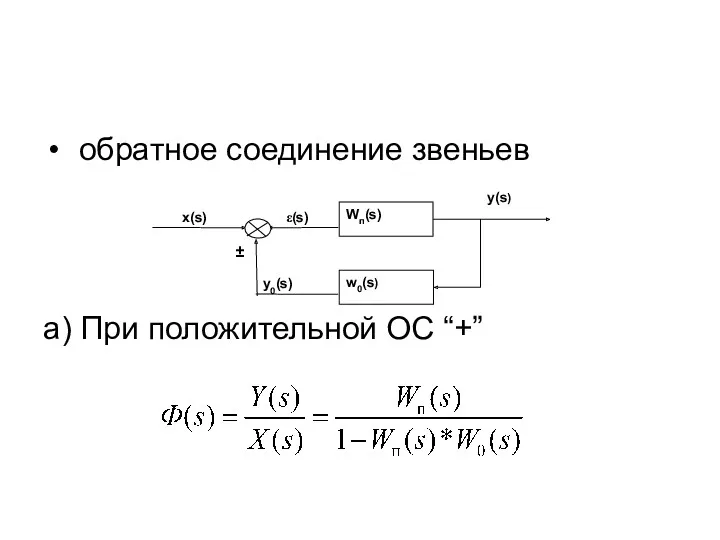
обратное соединение звеньев
a) При положительной ОС “+”
обратное соединение звеньев
a) При положительной ОС “+”
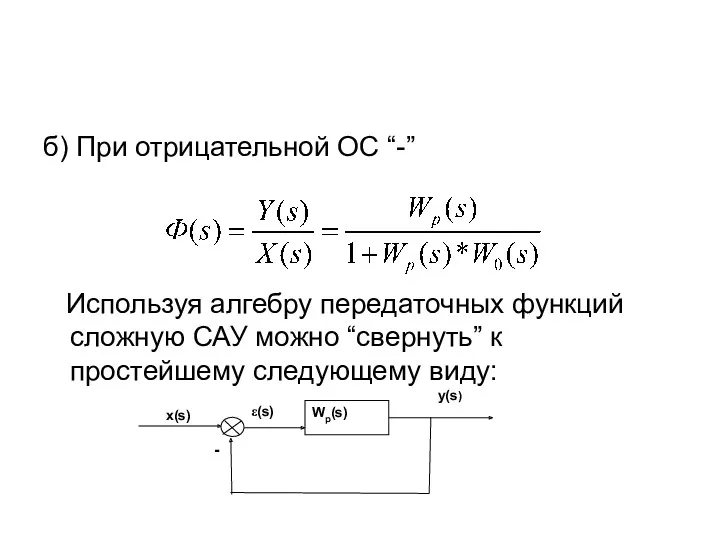
б) При отрицательной ОС “-”
Используя алгебру передаточных функций сложную САУ
б) При отрицательной ОС “-”
Используя алгебру передаточных функций сложную САУ

Основные типы звеньев САУ
1. Идеальное усилительное (безинерцион-ное) звено
Y = Kx
Основные типы звеньев САУ
1. Идеальное усилительное (безинерцион-ное) звено
Y = Kx
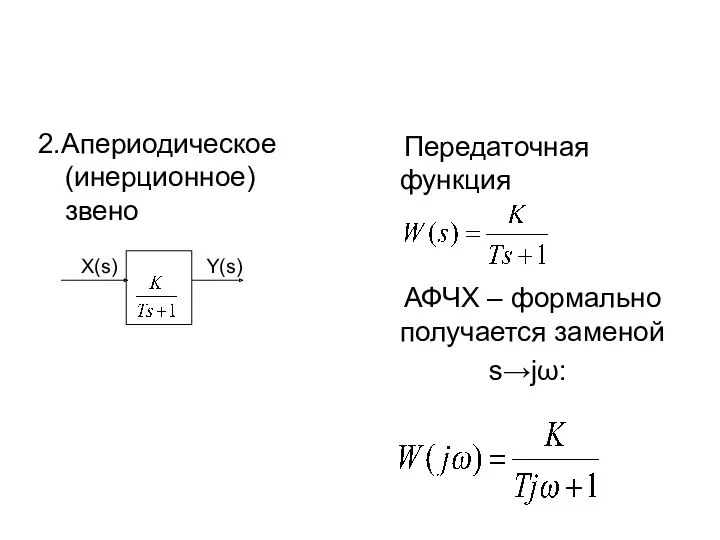
2.Апериодическое (инерционное) звено
Передаточная функция
АФЧХ – формально получается заменой
s→jω:
2.Апериодическое (инерционное) звено
Передаточная функция
АФЧХ – формально получается заменой
s→jω:
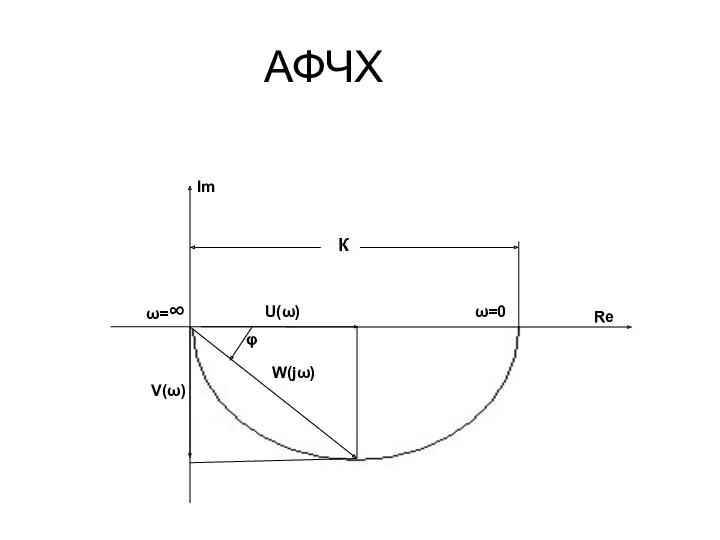
АФЧХ
АФЧХ
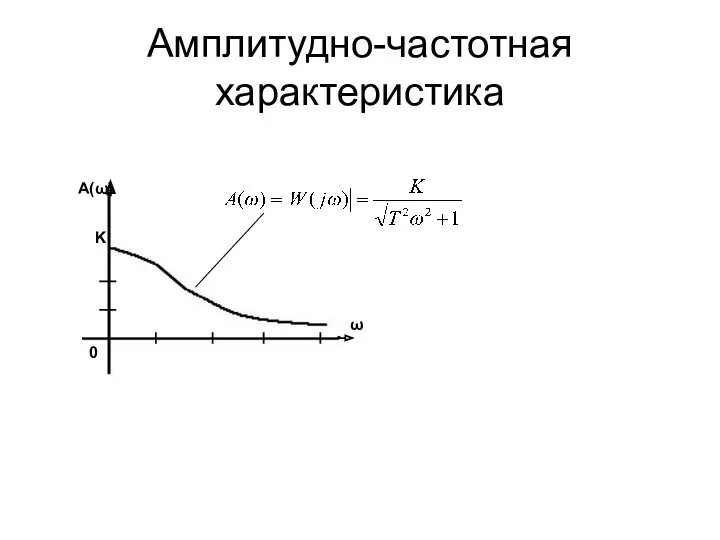
Амплитудно-частотная характеристика
Амплитудно-частотная характеристика
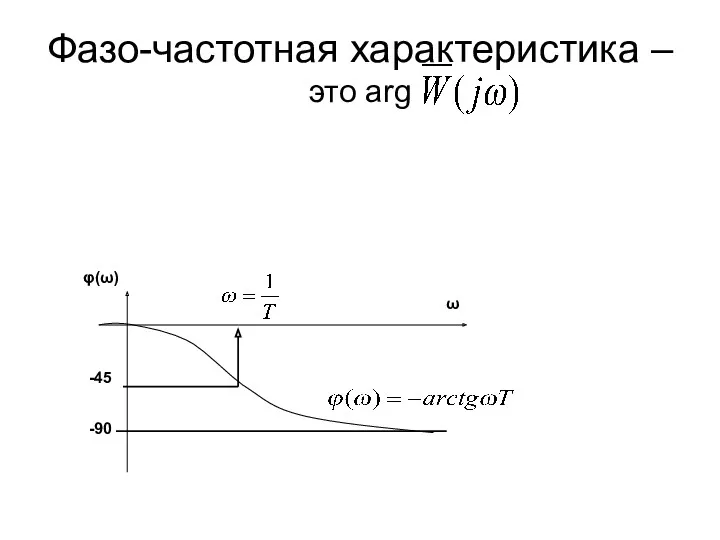
Фазо-частотная характеристика – это arg
Фазо-частотная характеристика – это arg
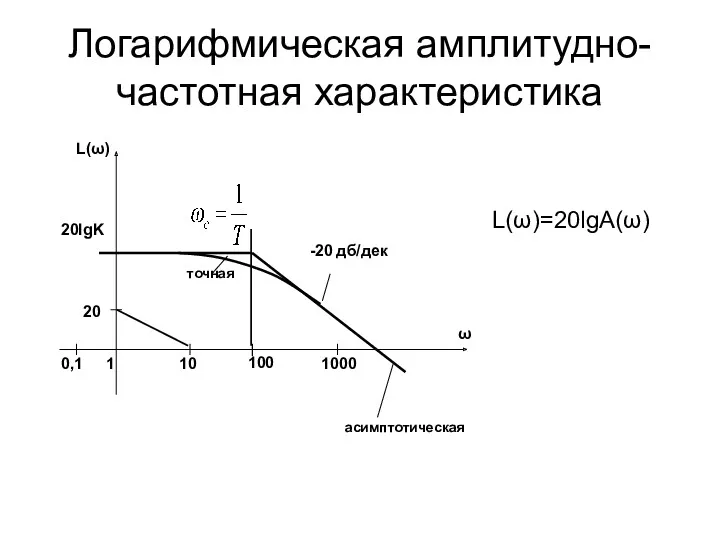
Логарифмическая амплитудно-частотная характеристика
L(ω)=20lgA(ω)
Логарифмическая амплитудно-частотная характеристика
L(ω)=20lgA(ω)
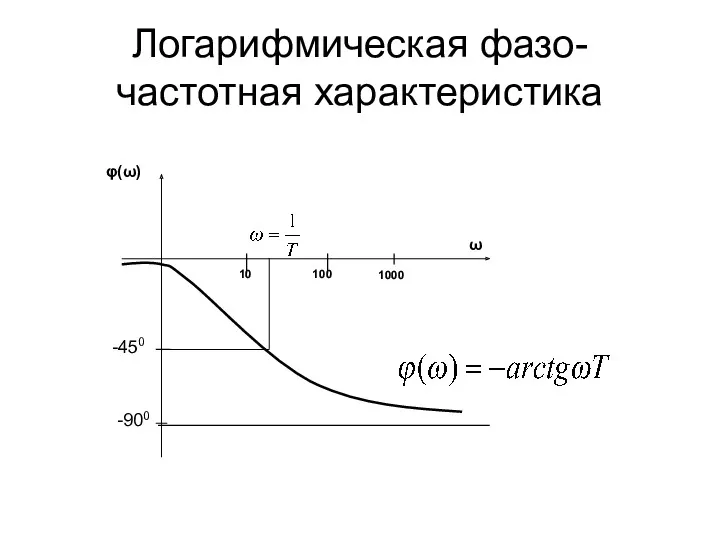
Логарифмическая фазо-частотная характеристика
Логарифмическая фазо-частотная характеристика
Переходная h(t) и весовая w(t) функции
Переходная h(t) и весовая w(t) функции
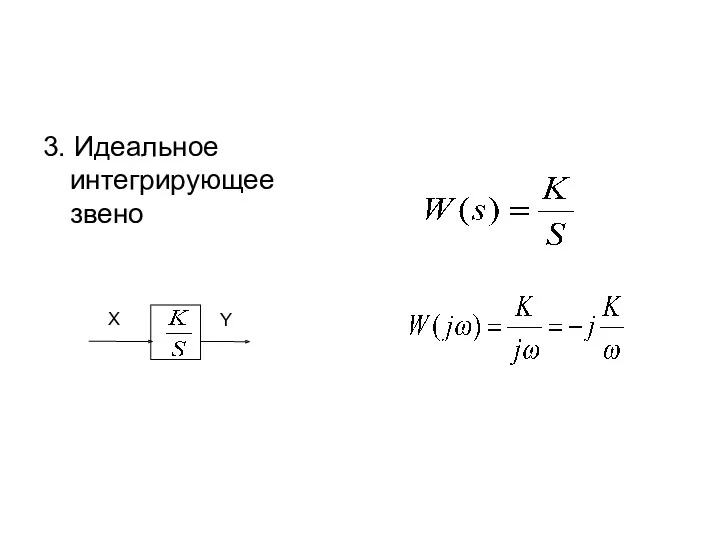
3. Идеальное интегрирующее звено
3. Идеальное интегрирующее звено
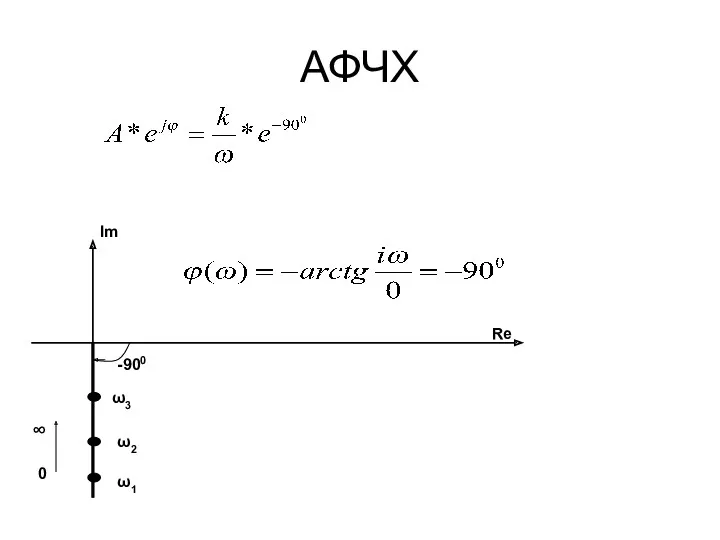
АФЧХ
АФЧХ
ЛАЧХ и ЛФЧХ
l(ω) = 20lgA(ω) = 20lgK – 20lgω
ЛАЧХ и ЛФЧХ
l(ω) = 20lgA(ω) = 20lgK – 20lgω
АЧХ и ФЧХ
АЧХ и ФЧХ
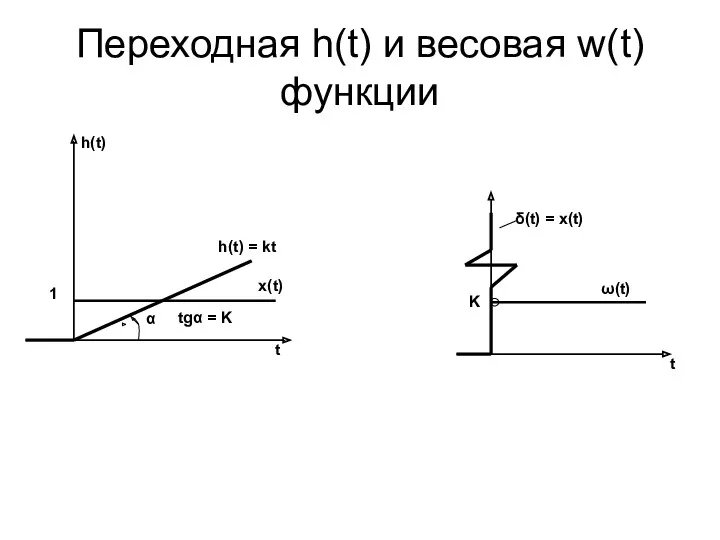
α
tgα = K
h(t) = kt
x(t)
h(t)
1
t
Переходная h(t) и весовая w(t) функции
α
tgα = K
h(t) = kt
x(t)
h(t)
1
t
Переходная h(t) и весовая w(t) функции
4. Идеальное дифференцирующее звено
w(s) = KS w(jω) = Kjω
4. Идеальное дифференцирующее звено
w(s) = KS w(jω) = Kjω
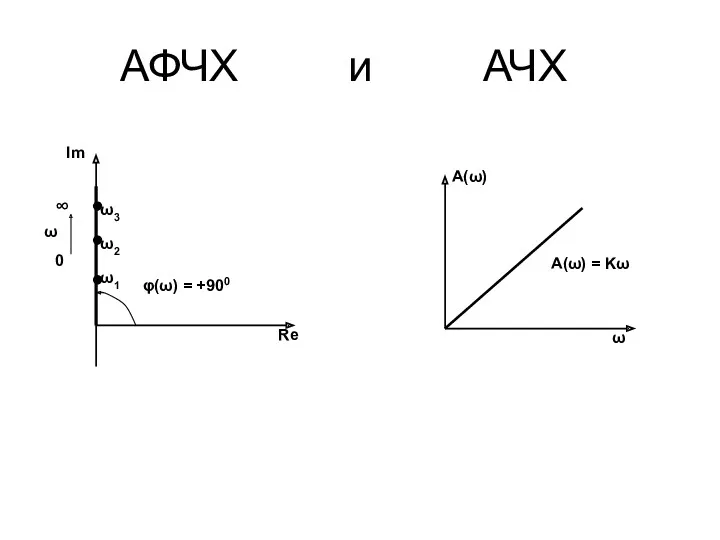
АФЧХ и АЧХ
АФЧХ и АЧХ
Логарифмические частотные характеристики
ЛАЧХ
ЛФЧХ
Логарифмические частотные характеристики
ЛАЧХ
ЛФЧХ
Правила преобразования структурных схем
Правила преобразования структурных схем

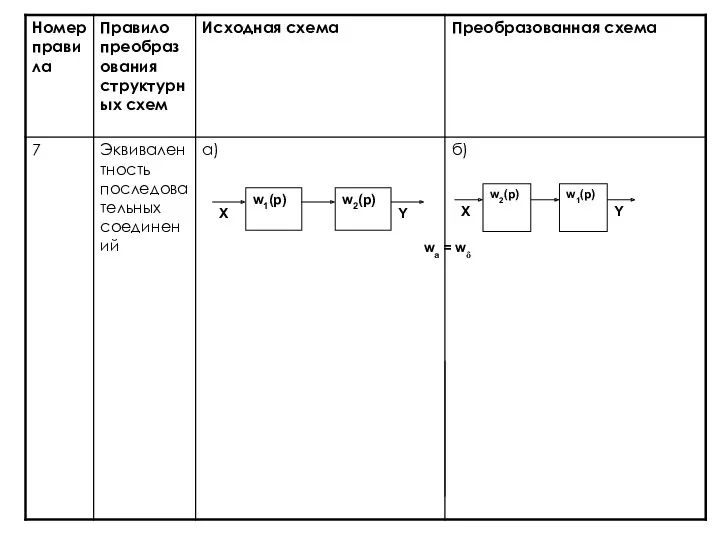
wа = wδ
wа = wδ
 Презентация к уроку Резьба по дереву (вводное занятие)
Презентация к уроку Резьба по дереву (вводное занятие) Презентация. Фелтинг. Брошь Мак
Презентация. Фелтинг. Брошь Мак Религия как социокультурный феномен
Религия как социокультурный феномен Електронні та друковані портфоліо
Електронні та друковані портфоліо Александр Трифонович Твардовский 1910-1971
Александр Трифонович Твардовский 1910-1971 Бумажная пластика. Игрушки на елке
Бумажная пластика. Игрушки на елке Самоходные погрузчики
Самоходные погрузчики СПб ГБПОУ Ленинградский машиностроительный техникум им. Ж.Я. Котина
СПб ГБПОУ Ленинградский машиностроительный техникум им. Ж.Я. Котина Кроссворд по правилам дорожного движения (с использованием клавиатуры)
Кроссворд по правилам дорожного движения (с использованием клавиатуры) Цветы в технике квиллинга
Цветы в технике квиллинга Кампания г. Санкт-Петербург: GRP 90.83 OTS 4039.30
Кампания г. Санкт-Петербург: GRP 90.83 OTS 4039.30 Способы решения показательных уравнений
Способы решения показательных уравнений Банк Хоум Кредит
Банк Хоум Кредит Экономика нефтегазовой отрасли
Экономика нефтегазовой отрасли Средиземноморская природная зона, или субтропики: жёстколистные вечнозелёные леса и кустарники, описание, климат, почвы
Средиземноморская природная зона, или субтропики: жёстколистные вечнозелёные леса и кустарники, описание, климат, почвы В бизнесе всё решают связью. Коммерческое предложение ПАО Ростелеком
В бизнесе всё решают связью. Коммерческое предложение ПАО Ростелеком Метод эквивалентного генератора
Метод эквивалентного генератора Мощность конвектора отопления
Мощность конвектора отопления Проект В лесном краю Почитаева
Проект В лесном краю Почитаева КОМПЬЮТЕРНАЯ ПРЕЗЕНТАЦИЯ ПО ГЕОГРАФИИ 11 КЛАСС ФРГ
КОМПЬЮТЕРНАЯ ПРЕЗЕНТАЦИЯ ПО ГЕОГРАФИИ 11 КЛАСС ФРГ Неделя игры и игрушки в подготовительной группе №8
Неделя игры и игрушки в подготовительной группе №8 Структура письма
Структура письма Актуальные проблемы транспортной инфраструктуры в субъектах России
Актуальные проблемы транспортной инфраструктуры в субъектах России Проектирование системы электроснабжения производственного цеха машиностроительного завода
Проектирование системы электроснабжения производственного цеха машиностроительного завода Механические процессы
Механические процессы Замбия Республикасы
Замбия Республикасы Презентация к исследованию
Презентация к исследованию Речной транспорт
Речной транспорт