- Параметры устройств и элементов роботов и робототехнических систем

Содержание
- 2. Содержание лекции Основные проблемы базовых технологий. Показатели систем связи с БЛА. Показатели навигационных систем для БЛА.
- 3. Основные проблемы базовых технологий - 1 Проектирование роботов и робототехнических систем. Ч.2. Лекция 10 1. Слабый
- 4. Показатели систем связи с БЛА - 1 Проектирование роботов и робототехнических систем. Ч.2. Лекция 10 Как
- 5. Показатели навигационных систем для БЛА - 1 Проектирование роботов и робототехнических систем. Ч.2. Лекция 10 Как
- 6. Параметры телевизионных камер - 1 Проектирование роботов и робототехнических систем. Ч.2. Лекция 10 Как следует из
- 7. Параметры гидроакустической связи - 1 Проектирование роботов и робототехнических систем. Ч.2. Лекция 10 Как следует из
- 8. Параметры аккумуляторов - 1 Проектирование роботов и робототехнических систем. Ч.2. Лекция 10 Как следует из рис.
- 9. Исполнение элементов - 1 Проектирование роботов и робототехнических систем. Ч.2. Лекция 10 Существуют следующие виды климатического
- 10. Исполнение элементов - 2 Проектирование роботов и робототехнических систем. Ч.2. Лекция 10 Также различают исполнение по
- 11. Исполнение элементов - 3 Проектирование роботов и робототехнических систем. Ч.2. Лекция 10 Вторая X означает защиту
- 12. Исполнение элементов - 4 Проектирование роботов и робототехнических систем. Ч.2. Лекция 10 Третья X означает защиту
- 13. Исполнение элементов - 5 Проектирование роботов и робототехнических систем. Ч.2. Лекция 10 Класс взрывозащиты обозначается в
- 14. Виды испытаний оборудования - 1 Проектирование роботов и робототехнических систем. Ч.2. Лекция 10 ГОСТ 16504-81 выделяет
- 15. Виды испытаний оборудования - 2 Проектирование роботов и робототехнических систем. Ч.2. Лекция 10
- 17. Скачать презентацию
Содержание лекции
Основные проблемы базовых технологий.
Показатели систем связи с БЛА.
Показатели навигационных систем
Содержание лекции
Основные проблемы базовых технологий.
Показатели систем связи с БЛА.
Показатели навигационных систем
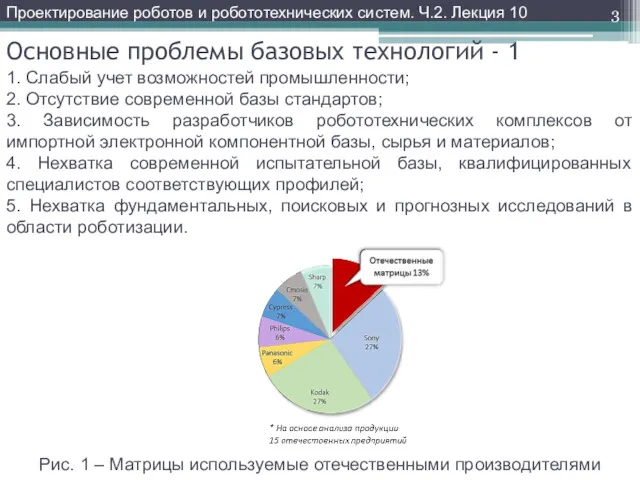
Основные проблемы базовых технологий - 1
Проектирование роботов и робототехнических систем. Ч.2.
Основные проблемы базовых технологий - 1
Проектирование роботов и робототехнических систем. Ч.2.

Показатели систем связи с БЛА - 1
Проектирование роботов и робототехнических систем.
Показатели систем связи с БЛА - 1
Проектирование роботов и робототехнических систем.

Показатели навигационных систем для БЛА - 1
Проектирование роботов и робототехнических систем.
Показатели навигационных систем для БЛА - 1
Проектирование роботов и робототехнических систем.
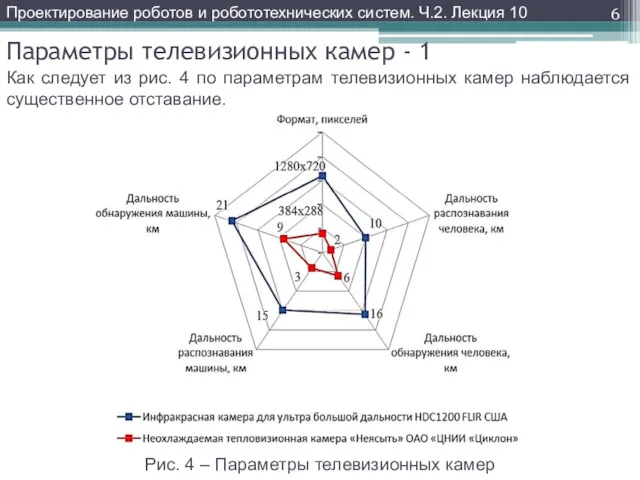
Параметры телевизионных камер - 1
Проектирование роботов и робототехнических систем. Ч.2. Лекция
Параметры телевизионных камер - 1
Проектирование роботов и робототехнических систем. Ч.2. Лекция
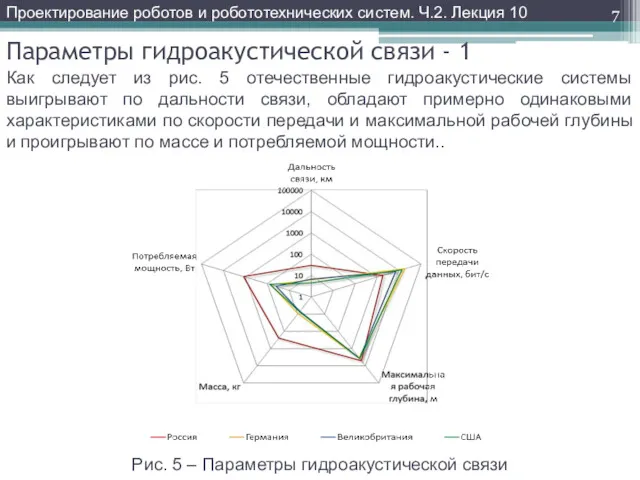
Параметры гидроакустической связи - 1
Проектирование роботов и робототехнических систем. Ч.2. Лекция
Параметры гидроакустической связи - 1
Проектирование роботов и робототехнических систем. Ч.2. Лекция
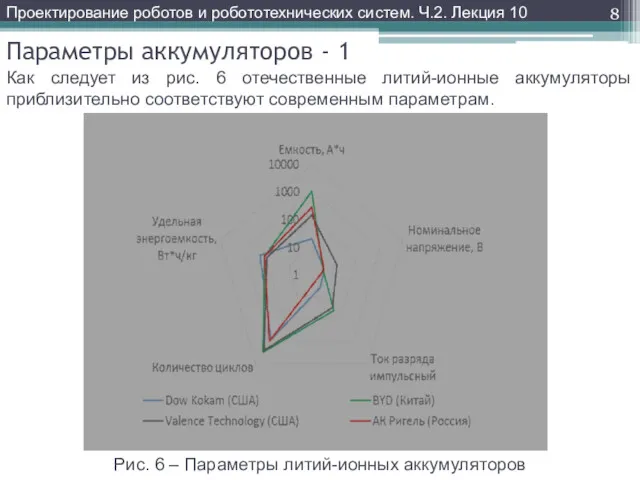
Параметры аккумуляторов - 1
Проектирование роботов и робототехнических систем. Ч.2. Лекция 10
Как
Параметры аккумуляторов - 1
Проектирование роботов и робототехнических систем. Ч.2. Лекция 10
Как

Исполнение элементов - 1
Проектирование роботов и робототехнических систем. Ч.2. Лекция 10
Существуют
Исполнение элементов - 1
Проектирование роботов и робототехнических систем. Ч.2. Лекция 10
Существуют

Исполнение элементов - 2
Проектирование роботов и робототехнических систем. Ч.2. Лекция 10
Также
Исполнение элементов - 2
Проектирование роботов и робототехнических систем. Ч.2. Лекция 10
Также

Исполнение элементов - 3
Проектирование роботов и робототехнических систем. Ч.2. Лекция 10
Вторая
Исполнение элементов - 3
Проектирование роботов и робототехнических систем. Ч.2. Лекция 10
Вторая

Исполнение элементов - 4
Проектирование роботов и робототехнических систем. Ч.2. Лекция 10
Третья
Исполнение элементов - 4
Проектирование роботов и робототехнических систем. Ч.2. Лекция 10
Третья
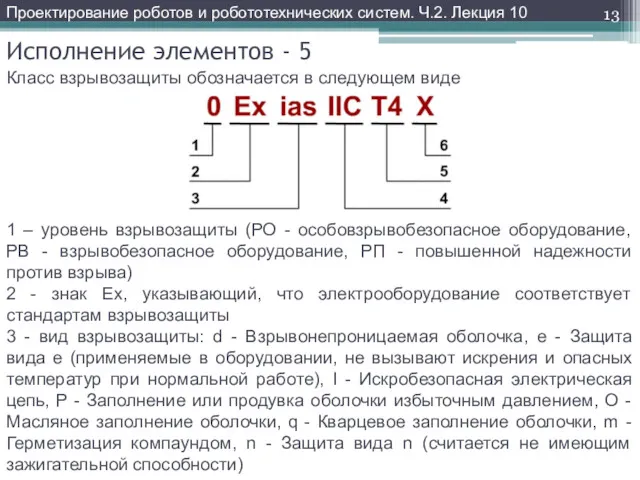
Исполнение элементов - 5
Проектирование роботов и робототехнических систем. Ч.2. Лекция 10
Класс
Исполнение элементов - 5
Проектирование роботов и робототехнических систем. Ч.2. Лекция 10
Класс

Виды испытаний оборудования - 1
Проектирование роботов и робототехнических систем. Ч.2. Лекция
Виды испытаний оборудования - 1
Проектирование роботов и робототехнических систем. Ч.2. Лекция
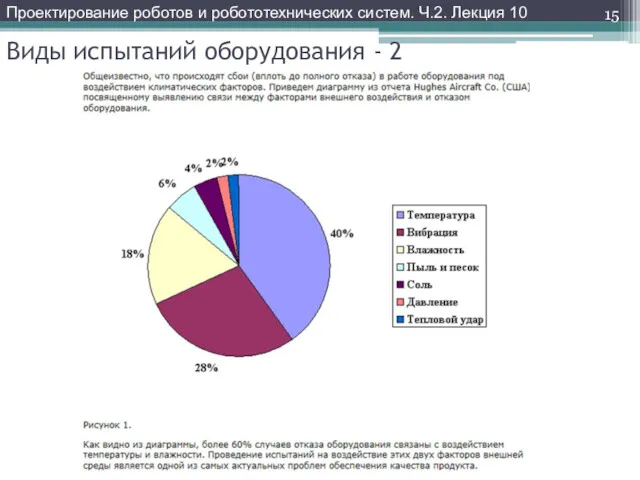
Виды испытаний оборудования - 2
Проектирование роботов и робототехнических систем. Ч.2. Лекция
Виды испытаний оборудования - 2
Проектирование роботов и робототехнических систем. Ч.2. Лекция
 Украшение предметов домашней утвари в технике декупаж
Украшение предметов домашней утвари в технике декупаж Теории происхождения жизни на Земле
Теории происхождения жизни на Земле Реконструкция технологического процесса погрузочно-разгрузочных работ с комплексной переработкой пиловочного сырья
Реконструкция технологического процесса погрузочно-разгрузочных работ с комплексной переработкой пиловочного сырья Способы поверхностного упрочнения
Способы поверхностного упрочнения Альтернативные источники энергии
Альтернативные источники энергии 7 класс: Население и государства Африки
7 класс: Население и государства Африки Словo Жыцця. Красавiк 2016. “Тое, што вы зрабілі аднаму з гэтых братоў Маіх меншых, вы Мне зрабілі” (Мц 25,40)
Словo Жыцця. Красавiк 2016. “Тое, што вы зрабілі аднаму з гэтых братоў Маіх меншых, вы Мне зрабілі” (Мц 25,40) Радуга, федеральная аптечная сеть
Радуга, федеральная аптечная сеть Хәсән Туфан
Хәсән Туфан Дифференциация звуков К - Г
Дифференциация звуков К - Г Происхождение жизни на Земле
Происхождение жизни на Земле Казахская кухня
Казахская кухня Функции таможенных органов согласно таможенному кодексу РФ
Функции таможенных органов согласно таможенному кодексу РФ Кіномистецтво
Кіномистецтво Создание условий для двигательной активности в детском саду. Консультация для воспитателей.
Создание условий для двигательной активности в детском саду. Консультация для воспитателей. 20181013_rasteniya_ao
20181013_rasteniya_ao Полезные и вредные привычки
Полезные и вредные привычки Презентация Мои любимые сказки
Презентация Мои любимые сказки Социально значимый проект Мой любимый уголок станицы
Социально значимый проект Мой любимый уголок станицы Технология асинхронного режима передачи. (Лекция 6)
Технология асинхронного режима передачи. (Лекция 6) Классный уголок
Классный уголок Теплоснабжение многоквартирных домов
Теплоснабжение многоквартирных домов Мягкая игрушка. Мишка
Мягкая игрушка. Мишка Вырубка лесов в Нижегородской области
Вырубка лесов в Нижегородской области Пелагіаль (лекція 4)
Пелагіаль (лекція 4) Сталинград-город герой
Сталинград-город герой Классификация электрических машин
Классификация электрических машин Japan_Country rules_Babich A_PZ-2004
Japan_Country rules_Babich A_PZ-2004