- Передатчики РЛС

Содержание
- 2. ЛБВ – электровакуумный прибор, в котором для генерирования и/или усиления электромагнитных колебаний СВЧ используется взаимодействие бегущей
- 3. Клистро́н — электровакуумный прибор, в котором преобразование постоянного потока электронов в переменный происходит путём модуляции скоростей
- 4. Уровни гармоник
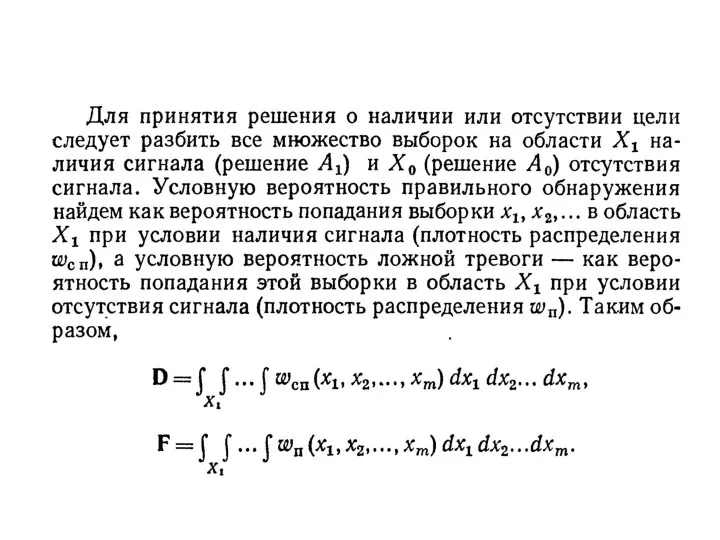
- 5. Прием и обнаружение радиолокационных сигналов Особенности задачи радиолокационного обнаружения: случайный характер появления сигнала; случайная амплитуда сигнала;
- 6. Детектирование радиолокационных сигналов Результат работы квадратурного (синхронного) детектора, по сравнению с амплитудным Порог Порог
- 7. Обнаружение – статистическая задача [после обнаружения может быть поставлена задача оценки параметров сигнала] Задача обнаружения ставится
- 8. При работе обнаружителя возможно 4 исхода: Правильное обнаружение: сигнал объективно присутствует, решение «Сигнал»; Правильное необнаружение: сигнал
- 9. Реализован аналоговый алгоритм обнаружения: Детектирование; Сравнение с порогом Наблюдаются: Ложная тревога Пропуск цели Примеры ошибочных решений
- 10. Критерии оптимального обнаружения Что означает термин «лучший обнаружитель»? Нужно определить критерий сравнения обнаружителей. При обнаружении возможны
- 11. Вводятся условные вероятности: D = p (A1 | H1) – вероятность правильного обнаружения D0 = p
- 12. Оптимальный обнаружитель должен обеспечивать минимум среднего риска («критерий Байеса») r = r01 p (H1) D0 +
- 13. Если априорные вероятности гипотез p (H1) и p (H0) не известны, а это типичная ситуация для
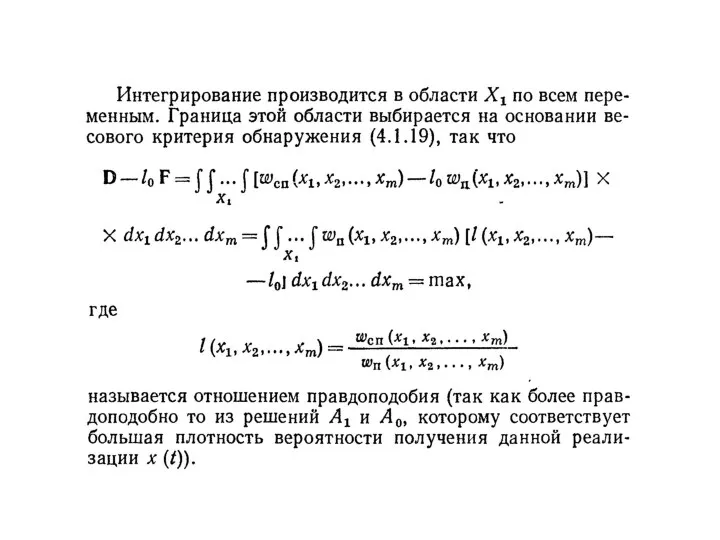
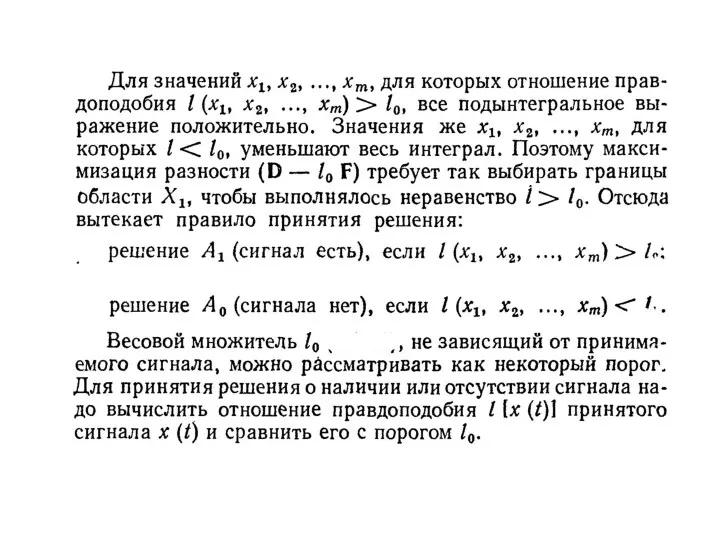
- 14. Отношение правдоподобия («полная теория»)
- 18. Отношение правдоподобия «простыми словами» Имеется реализация входного колебания в виде m отсчетов {ym}, взятых в соответствии
- 19. Если бы шума не было, то это скалярное произведение могло бы принять два значения (обозначим его
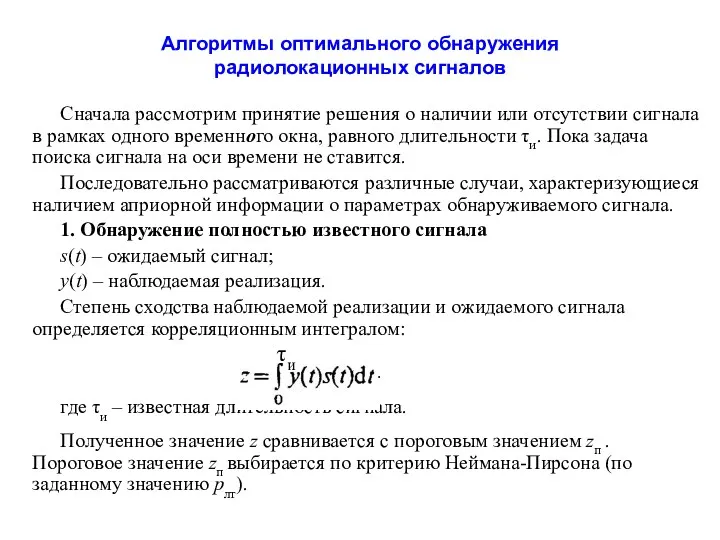
- 20. Алгоритмы оптимального обнаружения радиолокационных сигналов Сначала рассмотрим принятие решения о наличии или отсутствии сигнала в рамках
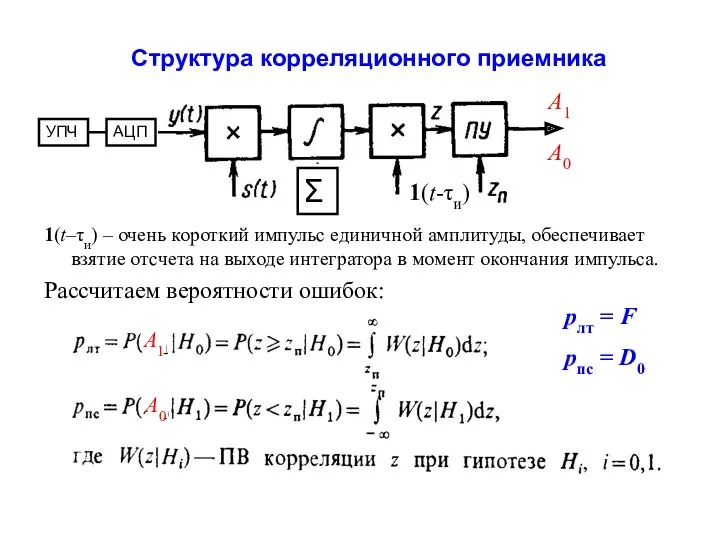
- 21. Структура корреляционного приемника 1(t–τи) – очень короткий импульс единичной амплитуды, обеспечивает взятие отсчета на выходе интегратора
- 22. z – линейное преобразование нормального случайного процесса (умножение на фиксированную функцию s(t) и интегрирование) → W{z|Hi}
- 23. Модель помехи (шума) В большинстве рассматриваемых задач в качестве модели помехи принимается «белый шум». Белый шум
- 24. Площади заштрихованных областей равны pлт и pпс . Плотность вероятности для нормального закона распределения: Графическое представление
- 25. Интеграл вероятности Ф(x) Введем безразмерную переменную величину t : Получим: pлт= 1 – Ф(h); pпс= Ф(h–q)
- 26. Порядок расчета обнаружителя по критерию Неймана-Пирсона Техническим заданием определено значение рлт. Из уравнения рлт = 1
- 27. Характеристики обнаружения рлт Сплошные линии – для полностью известного сигнала рлт
- 28. Практический расчет обнаружителя по критерию Неймана-Пирсона Пусть заданы значения рлт=10 –4 и q = 4. рлт
- 29. h = 3,72
- 30. Ф(0,28)
- 31. 2. Обнаружение сигнала со случайной начальной фазой (соотношение понятий «случайная» и «неизвестная» начальная фаза) Обнаружение полностью
- 32. Структура квадратурного корреляционного приемника Какое распределение имеет случайная начальная фаза? Адекватной моделью случайной начальной фазы сигнала
- 33. Расчет характеристик обнаружения – параметр обнаружения – табулированная Q-функция Маркума Порядок расчета: рлт → h →
- 34. Характеристики обнаружения рлт Пунктирные линии – сигнал со случайной начальной фазой
- 35. Какова цена случайной начальной фазы? Каков проигрыш в энергии сигнала при фиксированных значениях рлт и рпо
- 36. 3. Обнаружение сигнала со случайной амплитудой и начальной фазой (это и есть модель реального сигнала!) Теория
- 37. Распределение Рэлея Пример распределения Рэлея – длина гипотенузы прямоугольного треугольника, катеты которого имеют длину, распределенную нормально
- 38. Результат расчета вероятности пропуска Параметр h – как и ранее; параметр q – соответствует сигналу с
- 39. Характеристики обнаружения рлт Штрих-пунктирные линии - Интересный факт!
- 40. Поиск сигнала на оси времени В рассмотренных алгоритмах обнаружения одиночного импульса предполагалось, что сигнал в наблюдаемом
- 41. Как выбрать длительность временнОго окна? Например выбрать равным τи - опасность «потерять» половину сигнала … На
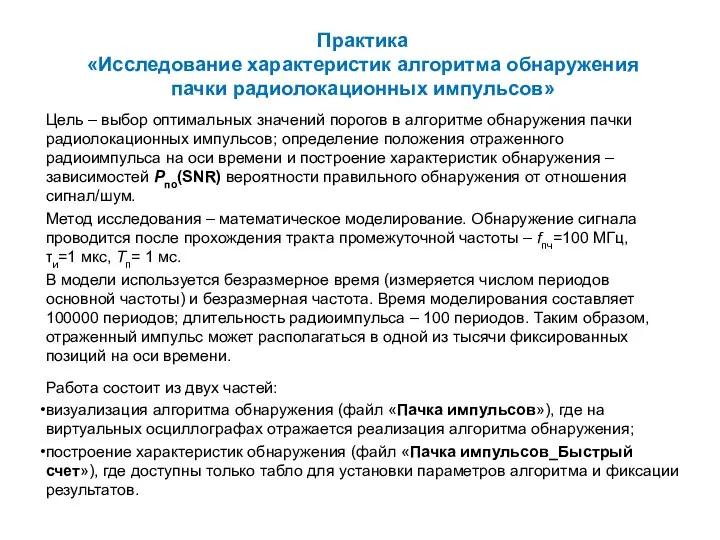
- 42. Практика, часть 1 «Исследование характеристик оптимальных алгоритмов обнаружения радиолокационного импульса» Цель – построение характеристик обнаружения –
- 43. Число ложных тревог отображается на табло «# of detection». Определение zп проводить по графику зависимости Pлт
- 44. Обнаружение пакетов импульсов Стандартный метод уменьшения ошибки измерения – проведение N независимых измерений и усреднение результатов.
- 45. 1. Когерентный пакет Для пакета этого вида все N радиоимпульсов являются одинаковыми (копиями) - имеют одну
- 46. 2. Некогерентный пакет Некогерентный пакет – пакет импульсов, у которого начальные фазы всех радиоимпульсов случайны и
- 47. 3. Флуктуирующий пакет Классификация флуктуирующих пакетов: дружные флуктуации – амплитуды импульсов изменяются для всех импульсов пакета
- 48. Практика «Исследование характеристик алгоритма обнаружения пачки радиолокационных импульсов» Цель – выбор оптимальных значений порогов в алгоритме
- 49. В файле «Пачка импульсов» передняя панель программы содержит следующие виртуальные осциллографы: «Base Signal» - демонстрирует перемещение
- 50. «Голосование» импульсов Пример – анализ пачки из 5 импульсов. Красная точка – отраженный радиоимпульс на фоне
- 51. 2. Выбор порога (далее – файл «Пачка импульсов_Быстрый счет»): Переключатель «Noise» включен, переключатель «Signal» выключен. Число
- 52. 5. Наблюдение за работой алгоритма «Накопление» (файл «Пачка импульсов накопление) – стандартный алгоритм при обнаружении пачки
- 53. Обнаружение неизвестного сигнала (пассивная радиолокация) Пример неизвестного сигнала – излучение сторонней РЛС Обнаружители неизвестного сигнала могут
- 54. Алгоритмы квазиоптимальных обнаружителей Как и в оптимальном алгоритме, в квазиоптимальном алгоритме на основе принятой реализации заданной
- 55. Алгоритм на основе БПФ необходимо АЦП (не реализуется в аналоговом виде); ограничения на частоту сигнала и
- 56. Энергетический алгоритм реализуется как в аналоговом, так и цифровом виде (с АЦП); отсчет величины Z берется
- 57. Алгоритм «Выброс» На выходе схемы сравнения в момент «выброса» колебания y(t) формируется короткий импульс. Выброс определяется
- 58. Счетчик импульсов определяет число выбросов n в окне. Решение о наличии сигнала принимается при условии n
- 59. Пример выбора параметров алгоритма «Выброс» Исходные данные о «неизвестном сигнале»: fmin= 0,5 ГГц; fmax= 1,0 ГГц;
- 60. Расчет числа выбросов на модели шума
- 61. Выбор Uпор по заданной вероятности ложной тревоги pЛТ = 0,001
- 62. Задачи пассивной радиолокации Рассматривается задача обнаружения и определения параметров «неизвестного излучения». Термин «неизвестное излучение» означает, что
- 63. Поиск в частотной области При поиске в частотной области приемное устройство должно работать с ненаправленной антенной.
- 64. Российские панорамные приемники – П5-26, П5-27 и П5-28: полоса частот 1,0 – 7,0 ГГц. тип -
- 65. Многоканальный приемник Совокупность идентичных приемников прямого усиления, перекрывающих заданную полосу обзора и обеспечивающих необходимую разрешающую способность
- 66. Поиск по азимуту Определение направления на некоторый объект из точки наблюдения называется пеленгацией. Азимут – угол
- 67. Амплитудная радиопеленгация осуществляется двумя методами: последовательный обзор; параллельный обзор. При последовательном обзоре пеленгация осуществляется поворотом ДН
- 68. Однако наибольшая крутизна ДН антенны наблюдается вблизи минимума (сравните скорость изменения функции cos x при x
- 69. Фазовый радиопеленгатор Простейшим и методически важным способом реализации фазового метода радиопеленгации является использование двух ненаправленных в
- 70. ФД ЛинТракт РПУ ЛинТракт РПУ На выходе фазового детектора с характеристикой UФД = sin Δϕ ,
- 71. Использование эффекта Доплера в радиолокации Эффект Доплера (в радиолокации) – частота принимаемого РЛС отраженного сигнала зависит
- 72. Как используется эффект Доплера? Для измерения радиальной скорости цели (скорость можно измерить и косвенно: определив две
- 73. Когерентно-импульсная РЛС с фазовым детектором на ПЧ Эффект Доплера относительно слабый. Его следует проявить на fПЧ,
- 74. «Слепые» скорости Эффект наблюдается в когерентно-импульсной РЛС. На рисунке показаны зондирующие импульсы uз, сформированные из напряжения
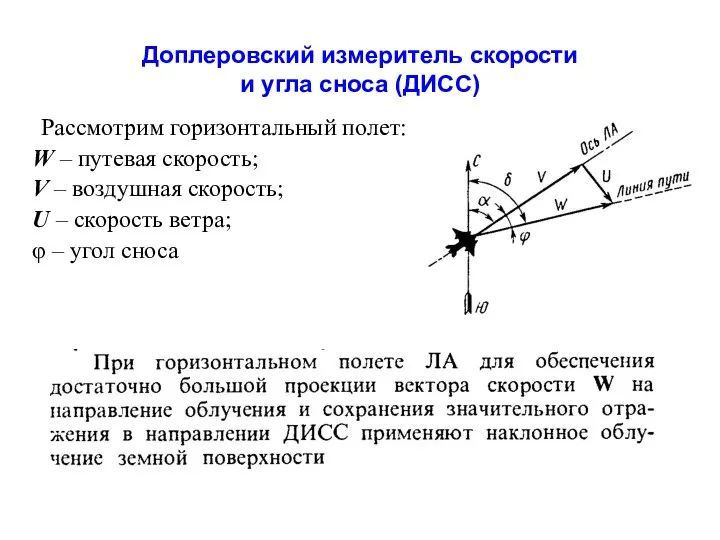
- 75. Доплеровский измеритель скорости и угла сноса (ДИСС) Рассмотрим горизонтальный полет: W – путевая скорость; V –
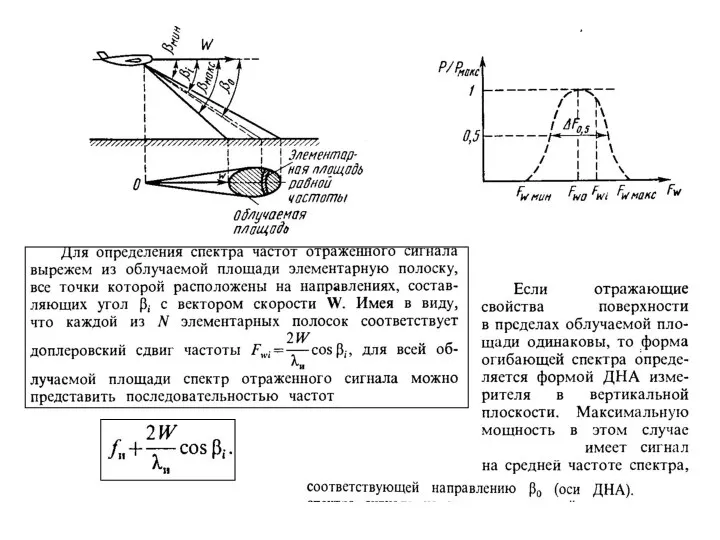
- 77. Ширина спектра сигнала по уровню половинной мощности: Для измерения путевой скорости ЛА необходимо найти среднюю частоту
- 78. и осью ДНА в момент ее совмещения с направлением вектора путевой скорости, т.е. при Fw =
- 79. ДИСС-7 ДИСС-7 является доплеровским измерителем путевой скорости и угла сноса с непрерывным излучением сигнала, с несимметричной
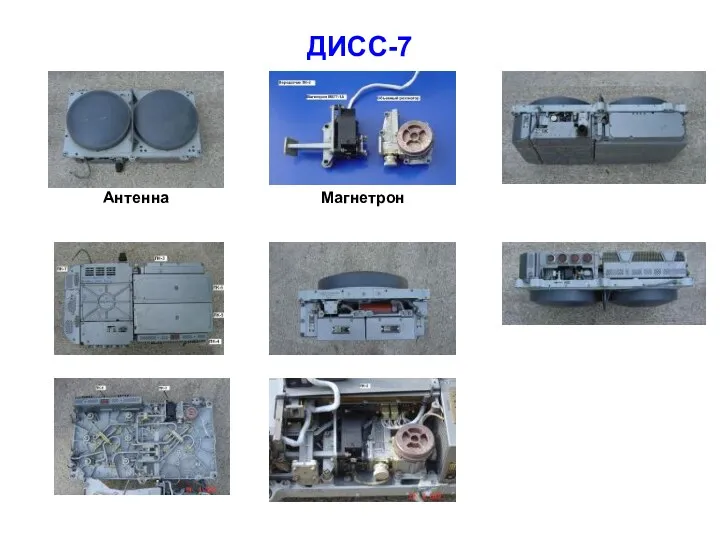
- 80. ДИСС-7 Антенна Магнетрон
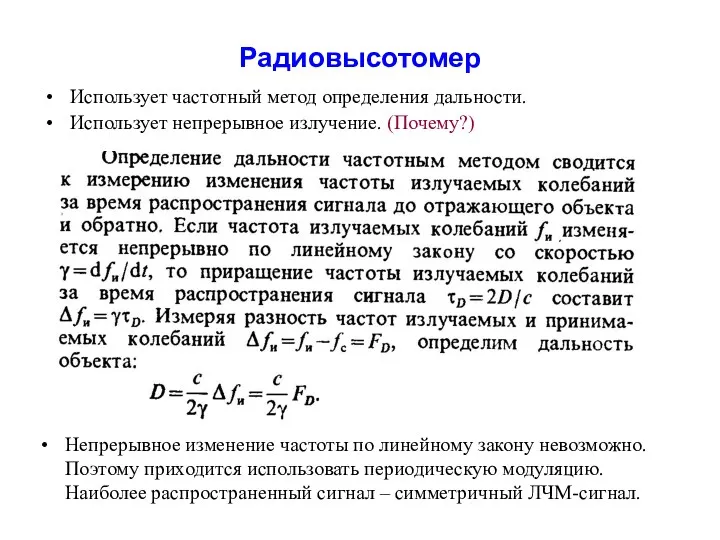
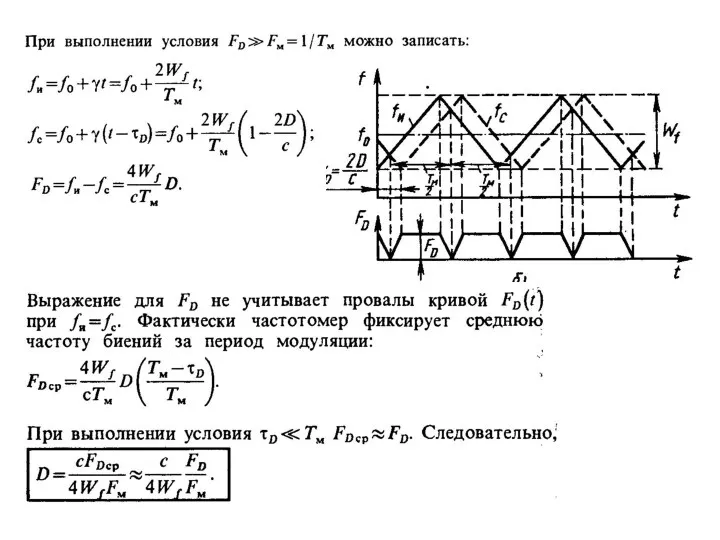
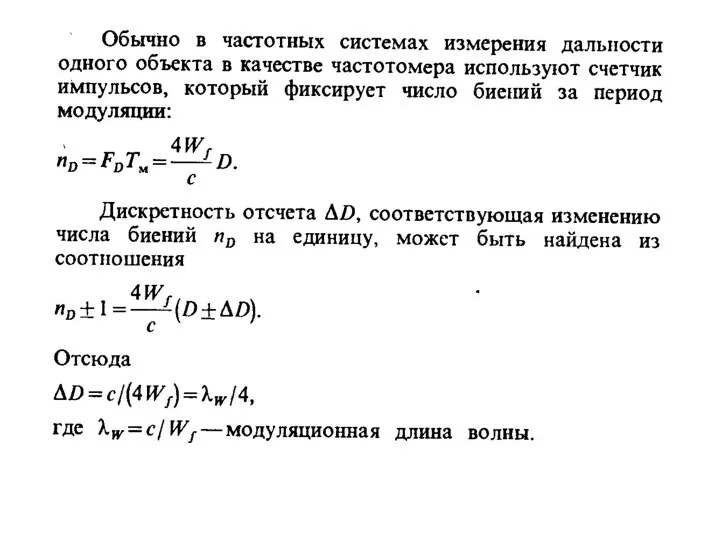
- 81. Радиовысотомер Использует частотный метод определения дальности. Использует непрерывное излучение. (Почему?) Непрерывное изменение частоты по линейному закону
- 82. f0 – средняя частота; Tм – период модуляции; Wf – девиация частоты; FD – разностная частота
- 86. Скачать презентацию
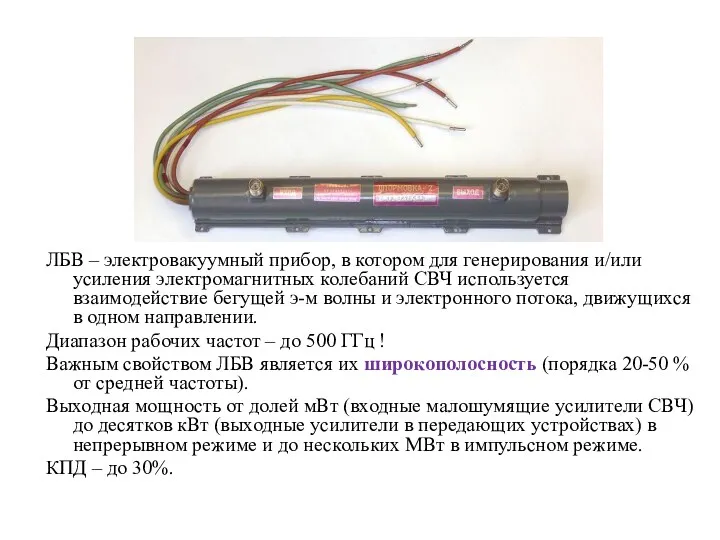
ЛБВ – электровакуумный прибор, в котором для генерирования и/или усиления электромагнитных
ЛБВ – электровакуумный прибор, в котором для генерирования и/или усиления электромагнитных

Клистро́н — электровакуумный прибор, в котором преобразование постоянного потока электронов в переменный
Клистро́н — электровакуумный прибор, в котором преобразование постоянного потока электронов в переменный
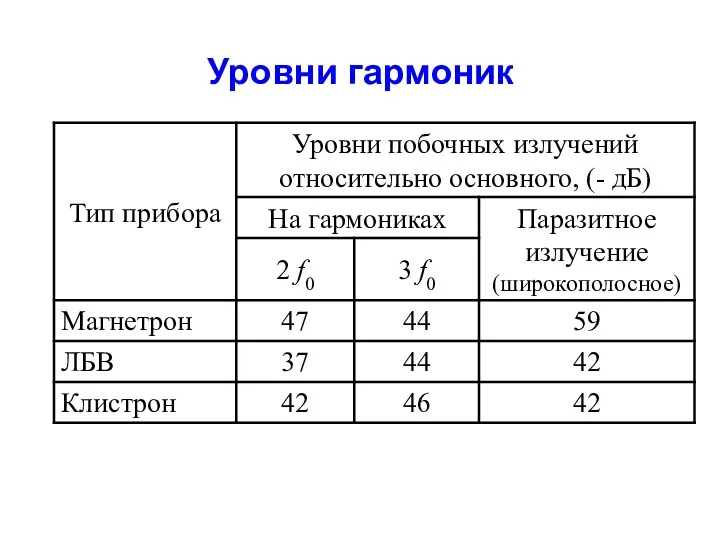
Уровни гармоник
Уровни гармоник
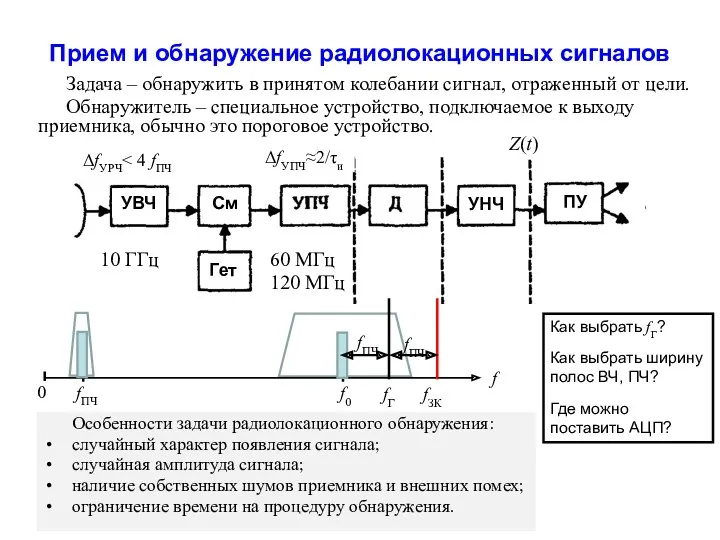
Прием и обнаружение радиолокационных сигналов
Особенности задачи радиолокационного обнаружения:
случайный характер появления сигнала;
случайная
Прием и обнаружение радиолокационных сигналов
Особенности задачи радиолокационного обнаружения:
случайный характер появления сигнала;
случайная
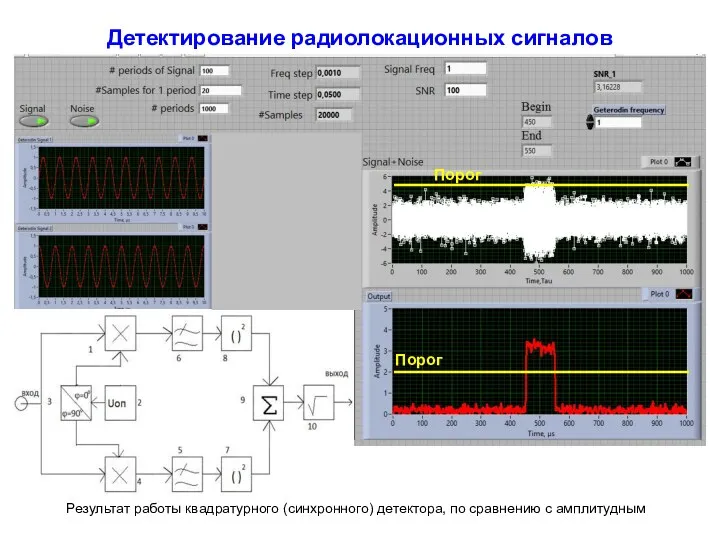
Детектирование радиолокационных сигналов
Результат работы квадратурного (синхронного) детектора, по сравнению с амплитудным
Порог
Порог
Детектирование радиолокационных сигналов
Результат работы квадратурного (синхронного) детектора, по сравнению с амплитудным
Порог
Порог
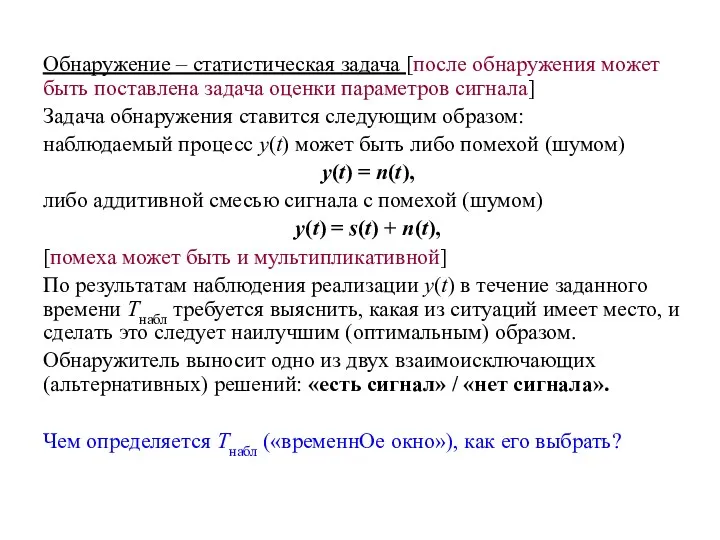
Обнаружение – статистическая задача [после обнаружения может быть поставлена задача оценки
Обнаружение – статистическая задача [после обнаружения может быть поставлена задача оценки
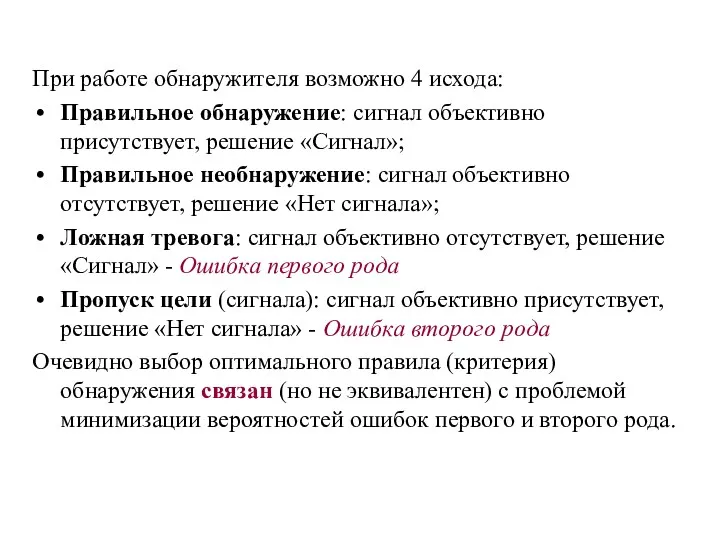
При работе обнаружителя возможно 4 исхода:
Правильное обнаружение: сигнал объективно присутствует, решение
При работе обнаружителя возможно 4 исхода:
Правильное обнаружение: сигнал объективно присутствует, решение
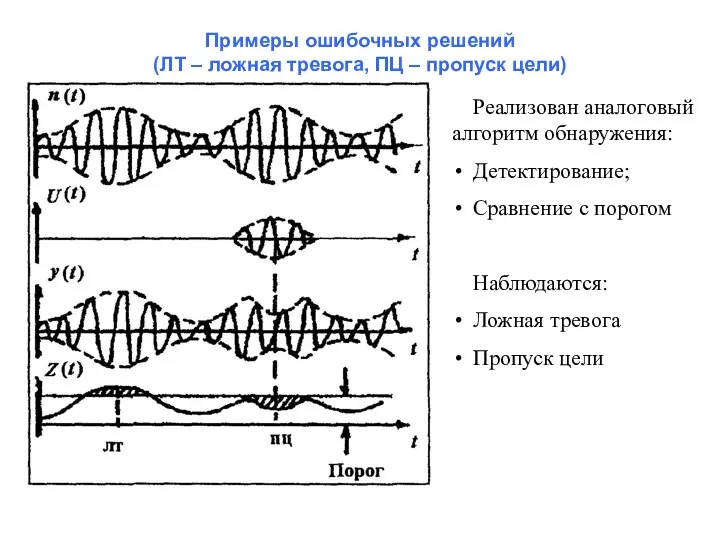
Реализован аналоговый алгоритм обнаружения:
Детектирование;
Сравнение с порогом
Наблюдаются:
Ложная тревога
Пропуск цели
Примеры ошибочных решений
Реализован аналоговый алгоритм обнаружения:
Детектирование;
Сравнение с порогом
Наблюдаются:
Ложная тревога
Пропуск цели
Примеры ошибочных решений
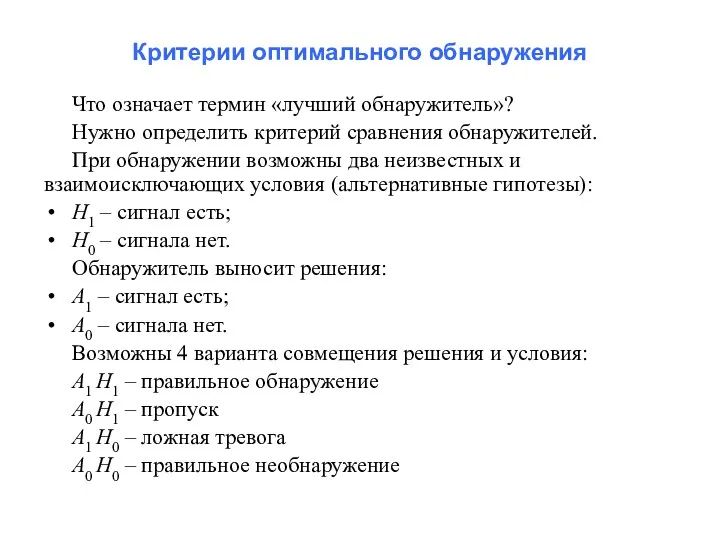
Критерии оптимального обнаружения
Что означает термин «лучший обнаружитель»?
Нужно определить критерий сравнения обнаружителей.
При
Критерии оптимального обнаружения
Что означает термин «лучший обнаружитель»?
Нужно определить критерий сравнения обнаружителей.
При
Вводятся условные вероятности:
D = p (A1 | H1) – вероятность правильного
Вводятся условные вероятности:
D = p (A1 | H1) – вероятность правильного
Оптимальный обнаружитель должен обеспечивать минимум среднего риска («критерий Байеса»)
r = r01
Оптимальный обнаружитель должен обеспечивать минимум среднего риска («критерий Байеса»)
r = r01
Если априорные вероятности гипотез p (H1) и p (H0) не известны,
Если априорные вероятности гипотез p (H1) и p (H0) не известны,
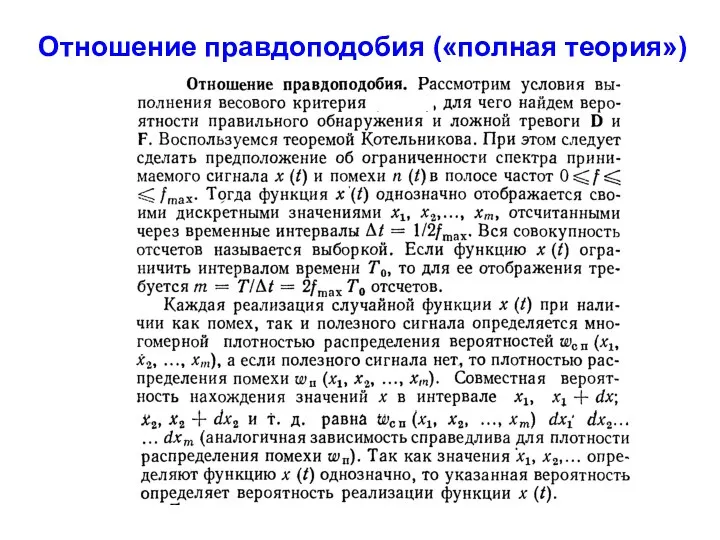
Отношение правдоподобия («полная теория»)
Отношение правдоподобия («полная теория»)
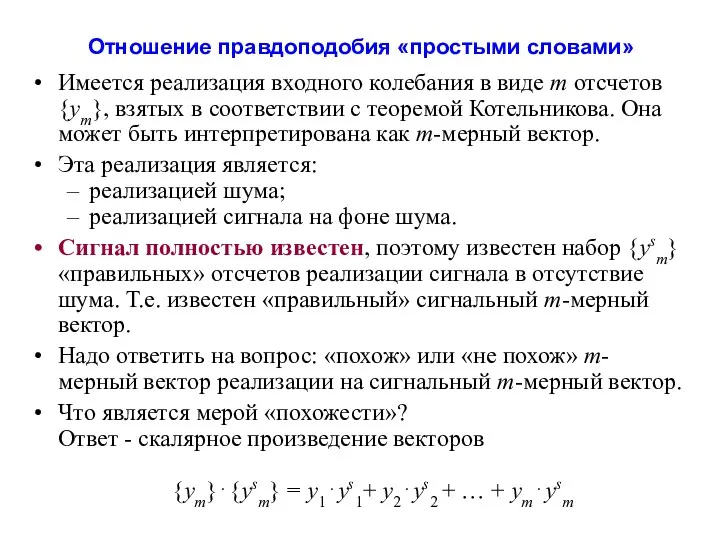
Отношение правдоподобия «простыми словами»
Имеется реализация входного колебания в виде m отсчетов
Отношение правдоподобия «простыми словами»
Имеется реализация входного колебания в виде m отсчетов
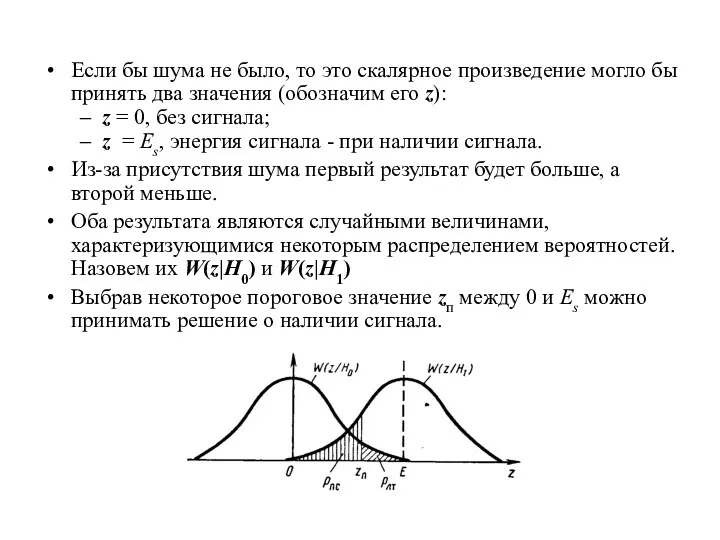
Если бы шума не было, то это скалярное произведение могло бы
Если бы шума не было, то это скалярное произведение могло бы
Алгоритмы оптимального обнаружения
радиолокационных сигналов
Сначала рассмотрим принятие решения о наличии или
Алгоритмы оптимального обнаружения
радиолокационных сигналов
Сначала рассмотрим принятие решения о наличии или
Структура корреляционного приемника
1(t–τи) – очень короткий импульс единичной амплитуды, обеспечивает взятие
Структура корреляционного приемника
1(t–τи) – очень короткий импульс единичной амплитуды, обеспечивает взятие
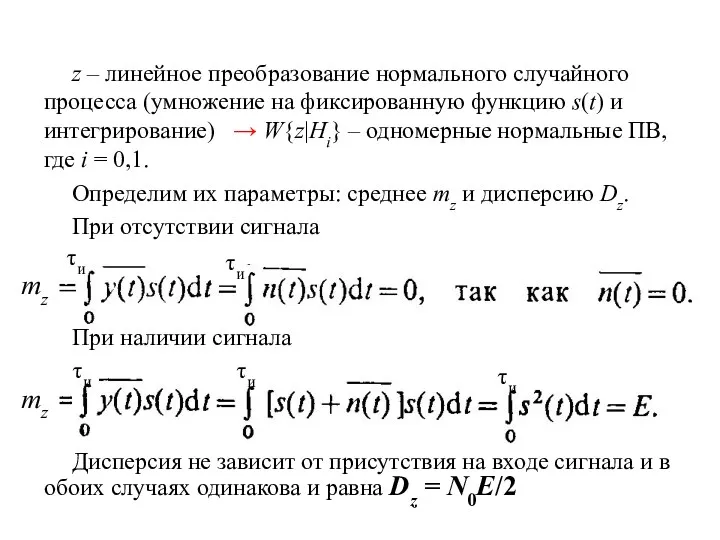
z – линейное преобразование нормального случайного процесса (умножение на фиксированную функцию
z – линейное преобразование нормального случайного процесса (умножение на фиксированную функцию
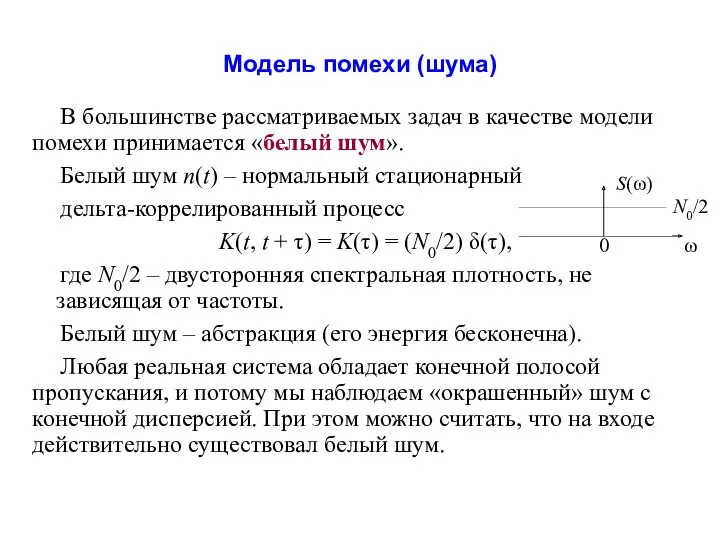
Модель помехи (шума)
В большинстве рассматриваемых задач в качестве модели помехи принимается
Модель помехи (шума)
В большинстве рассматриваемых задач в качестве модели помехи принимается
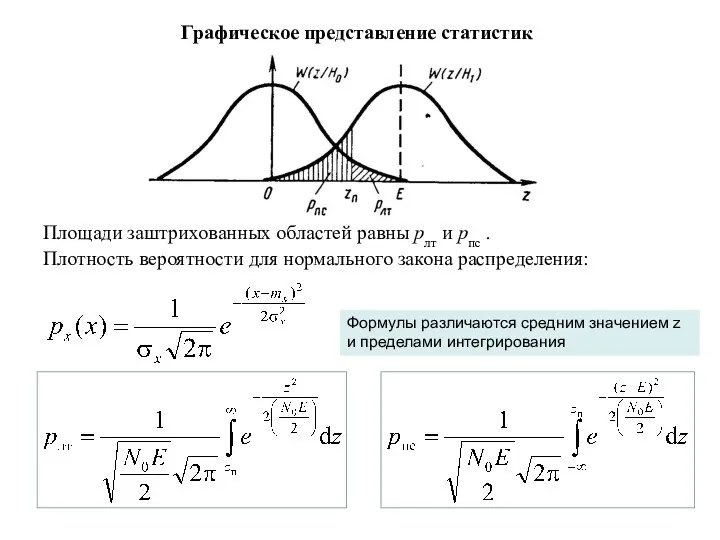
Площади заштрихованных областей равны pлт и pпс .
Плотность вероятности для нормального
Площади заштрихованных областей равны pлт и pпс .
Плотность вероятности для нормального
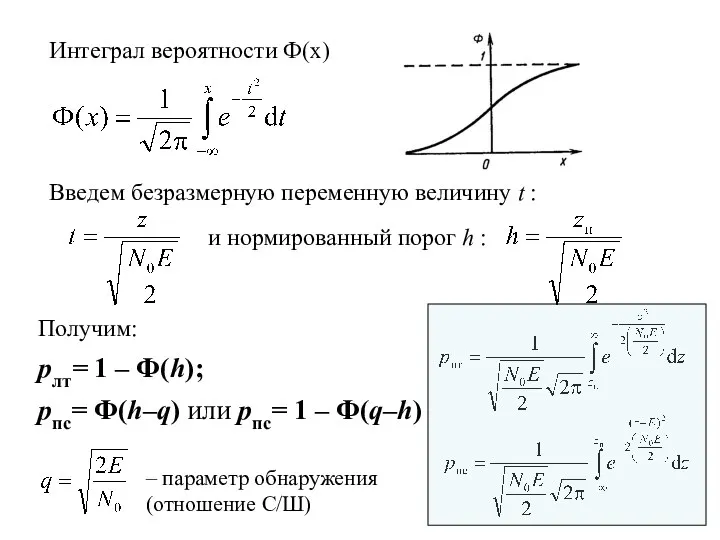
Интеграл вероятности Ф(x)
Введем безразмерную переменную величину t :
Получим:
pлт= 1 – Ф(h);
Интеграл вероятности Ф(x)
Введем безразмерную переменную величину t :
Получим:
pлт= 1 – Ф(h);
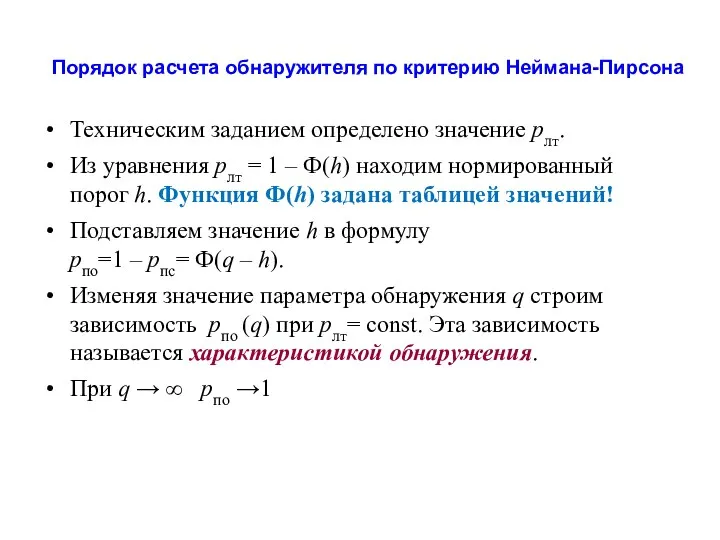
Порядок расчета обнаружителя по критерию Неймана-Пирсона
Техническим заданием определено значение рлт.
Из уравнения
Порядок расчета обнаружителя по критерию Неймана-Пирсона
Техническим заданием определено значение рлт.
Из уравнения

Характеристики обнаружения
рлт
Сплошные линии – для полностью известного сигнала
рлт
Характеристики обнаружения
рлт
Сплошные линии – для полностью известного сигнала
рлт
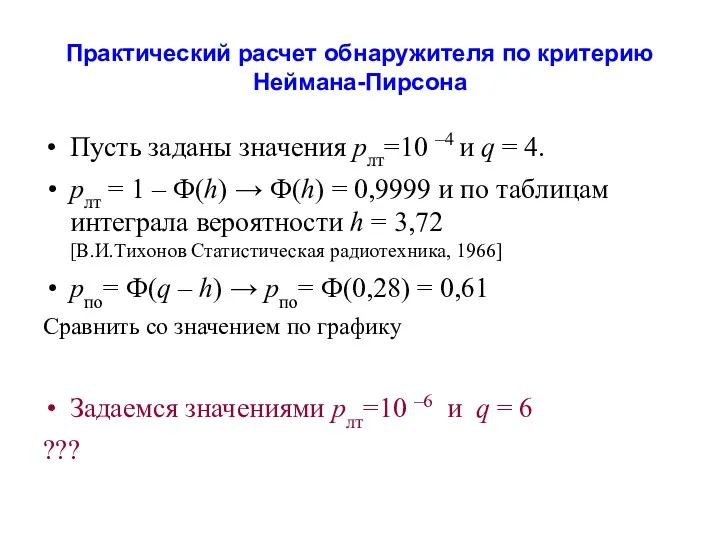
Практический расчет обнаружителя по критерию Неймана-Пирсона
Пусть заданы значения рлт=10 –4 и
Практический расчет обнаружителя по критерию Неймана-Пирсона
Пусть заданы значения рлт=10 –4 и
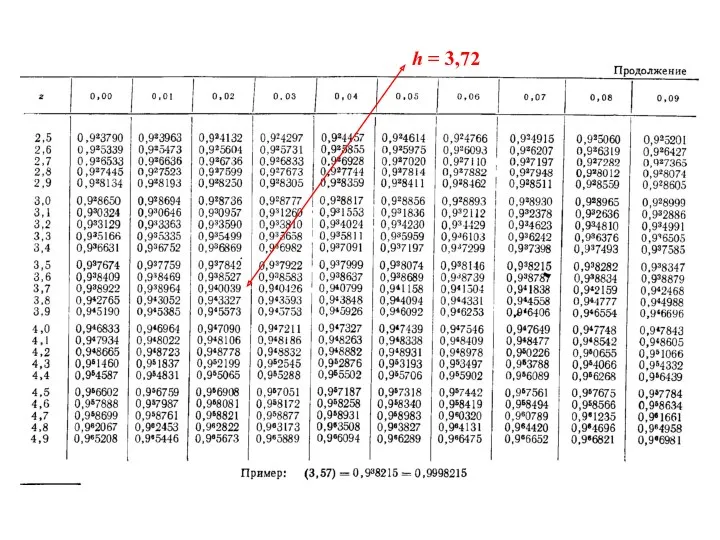
h = 3,72
h = 3,72
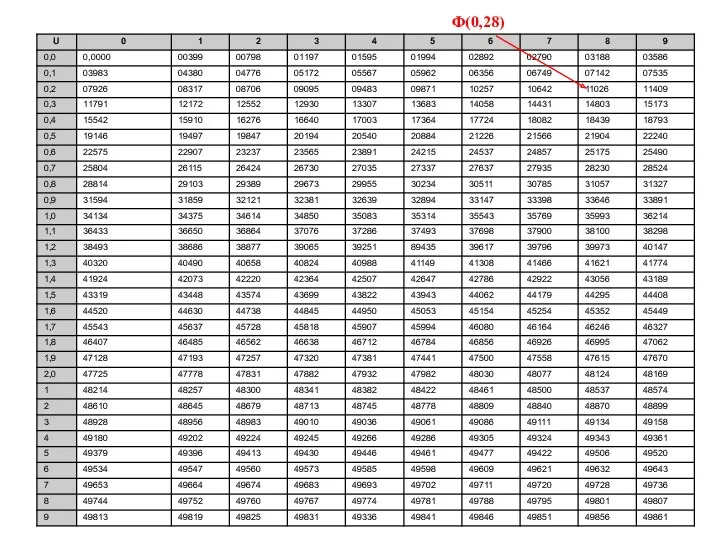
Ф(0,28)
Ф(0,28)
2. Обнаружение сигнала со случайной начальной фазой
(соотношение понятий «случайная» и «неизвестная»
2. Обнаружение сигнала со случайной начальной фазой
(соотношение понятий «случайная» и «неизвестная»
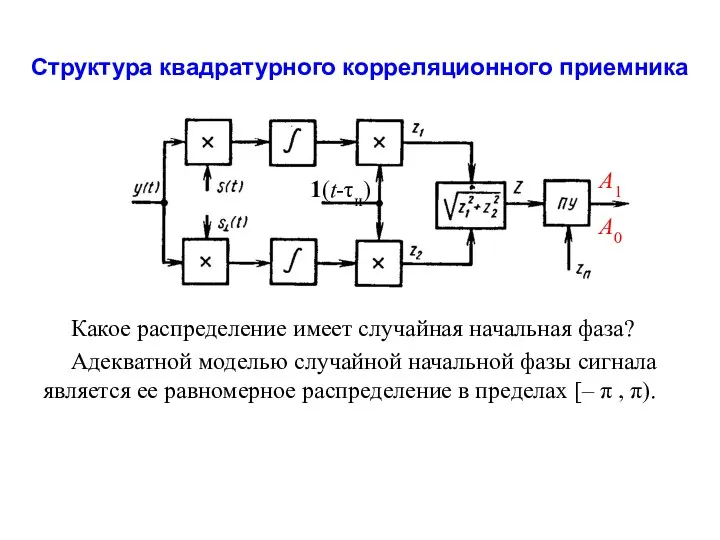
Структура квадратурного корреляционного приемника
Какое распределение имеет случайная начальная фаза?
Адекватной моделью случайной
Структура квадратурного корреляционного приемника
Какое распределение имеет случайная начальная фаза?
Адекватной моделью случайной
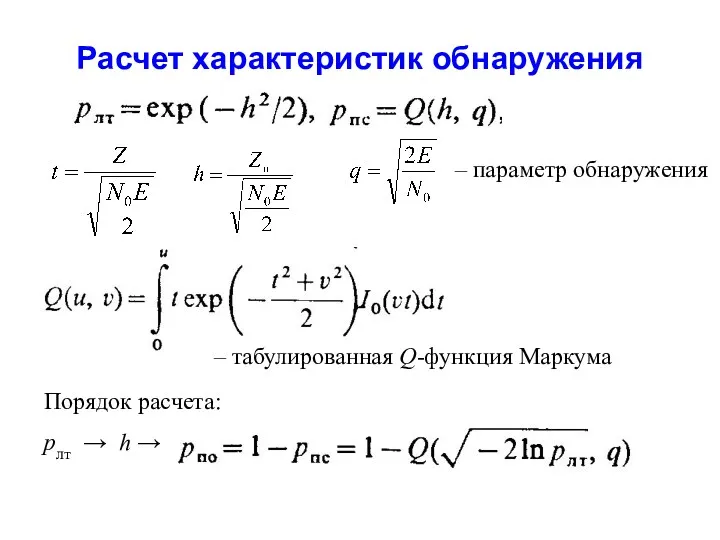
Расчет характеристик обнаружения
– параметр обнаружения
– табулированная Q-функция Маркума
Порядок расчета:
рлт → h
Расчет характеристик обнаружения
– параметр обнаружения
– табулированная Q-функция Маркума
Порядок расчета:
рлт → h

Характеристики обнаружения
рлт
Пунктирные линии – сигнал со случайной начальной фазой
Характеристики обнаружения
рлт
Пунктирные линии – сигнал со случайной начальной фазой
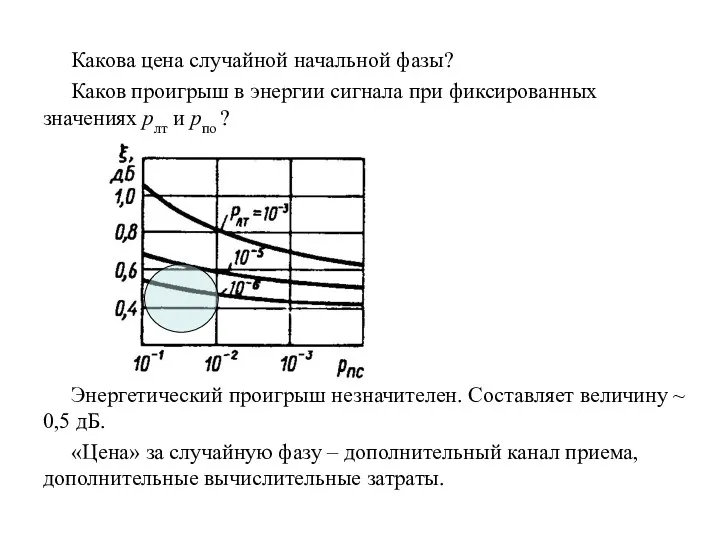
Какова цена случайной начальной фазы?
Каков проигрыш в энергии сигнала при
Какова цена случайной начальной фазы?
Каков проигрыш в энергии сигнала при
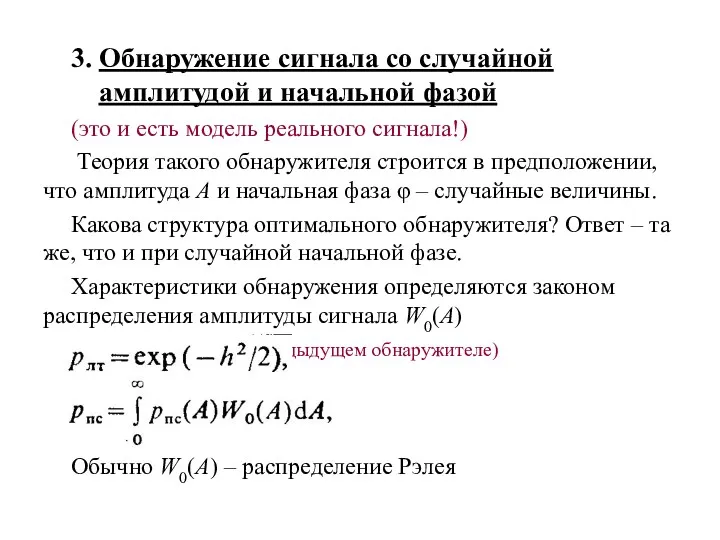
3. Обнаружение сигнала со случайной амплитудой и начальной фазой
(это и есть
3. Обнаружение сигнала со случайной амплитудой и начальной фазой
(это и есть
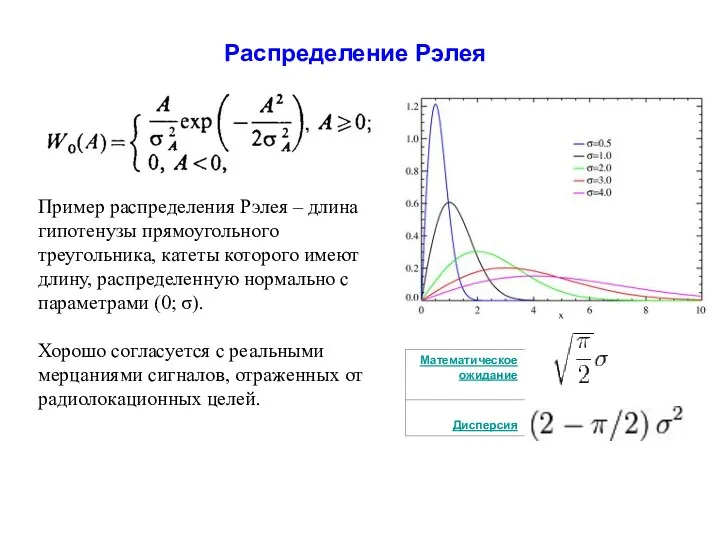
Распределение Рэлея
Пример распределения Рэлея – длина гипотенузы прямоугольного треугольника, катеты которого
Распределение Рэлея
Пример распределения Рэлея – длина гипотенузы прямоугольного треугольника, катеты которого
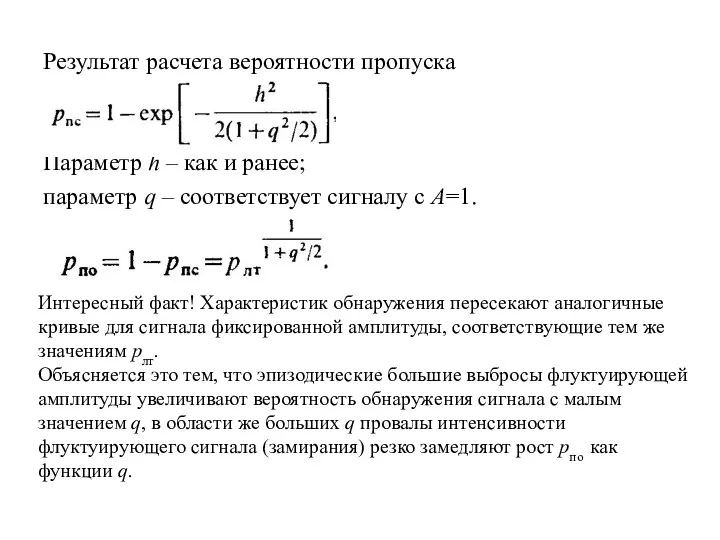
Результат расчета вероятности пропуска
Параметр h – как и ранее;
параметр q
Результат расчета вероятности пропуска
Параметр h – как и ранее;
параметр q

Характеристики обнаружения
рлт
Штрих-пунктирные линии - Интересный факт!
Характеристики обнаружения
рлт
Штрих-пунктирные линии - Интересный факт!
Поиск сигнала на оси времени
В рассмотренных алгоритмах обнаружения одиночного импульса предполагалось,
Поиск сигнала на оси времени
В рассмотренных алгоритмах обнаружения одиночного импульса предполагалось,
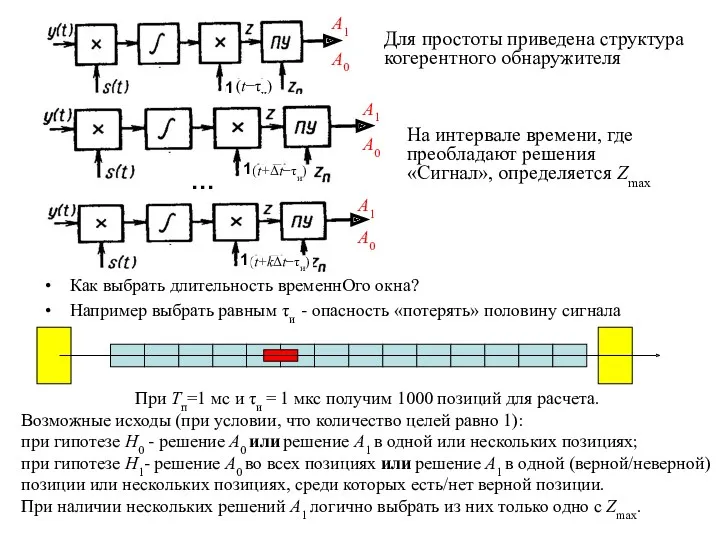
Как выбрать длительность временнОго окна?
Например выбрать равным τи - опасность «потерять»
Как выбрать длительность временнОго окна?
Например выбрать равным τи - опасность «потерять»
Практика, часть 1
«Исследование характеристик оптимальных алгоритмов обнаружения радиолокационного импульса»
Цель – построение
Практика, часть 1
«Исследование характеристик оптимальных алгоритмов обнаружения радиолокационного импульса»
Цель – построение
Число ложных тревог отображается на табло «# of detection». Определение zп
Число ложных тревог отображается на табло «# of detection». Определение zп
Обнаружение пакетов импульсов
Стандартный метод уменьшения ошибки измерения – проведение N независимых
Обнаружение пакетов импульсов
Стандартный метод уменьшения ошибки измерения – проведение N независимых
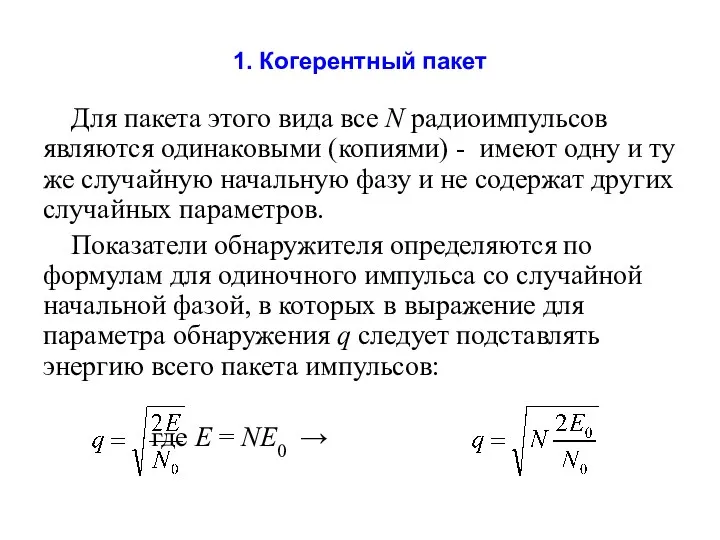
1. Когерентный пакет
Для пакета этого вида все N радиоимпульсов являются одинаковыми
1. Когерентный пакет
Для пакета этого вида все N радиоимпульсов являются одинаковыми
2. Некогерентный пакет
Некогерентный пакет – пакет импульсов, у которого начальные фазы
2. Некогерентный пакет
Некогерентный пакет – пакет импульсов, у которого начальные фазы
3. Флуктуирующий пакет
Классификация флуктуирующих пакетов:
дружные флуктуации – амплитуды импульсов изменяются для
3. Флуктуирующий пакет
Классификация флуктуирующих пакетов:
дружные флуктуации – амплитуды импульсов изменяются для
Практика
«Исследование характеристик алгоритма обнаружения пачки радиолокационных импульсов»
Цель – выбор оптимальных значений
Практика
«Исследование характеристик алгоритма обнаружения пачки радиолокационных импульсов»
Цель – выбор оптимальных значений
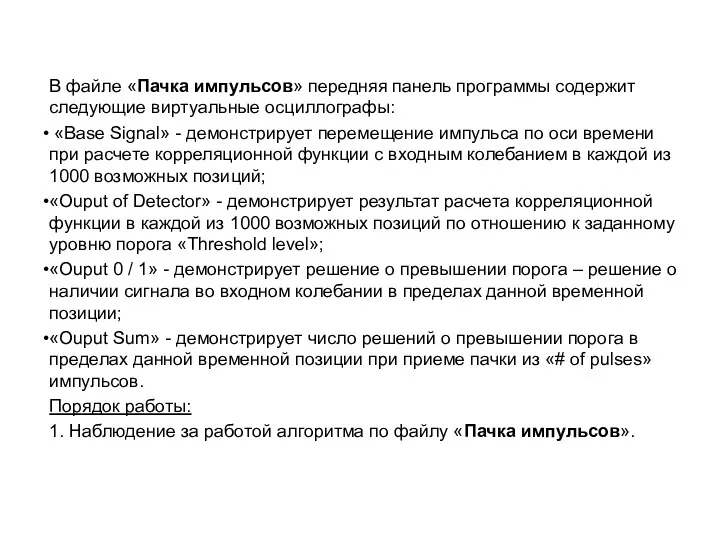
В файле «Пачка импульсов» передняя панель программы содержит следующие виртуальные осциллографы:
В файле «Пачка импульсов» передняя панель программы содержит следующие виртуальные осциллографы:
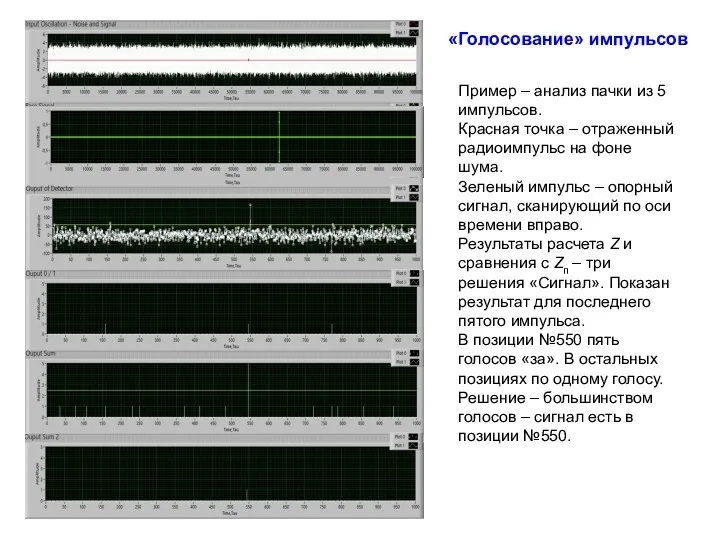
«Голосование» импульсов
Пример – анализ пачки из 5 импульсов.
Красная точка – отраженный
«Голосование» импульсов
Пример – анализ пачки из 5 импульсов.
Красная точка – отраженный
2. Выбор порога (далее – файл «Пачка импульсов_Быстрый счет»):
Переключатель «Noise» включен,
2. Выбор порога (далее – файл «Пачка импульсов_Быстрый счет»):
Переключатель «Noise» включен,
5. Наблюдение за работой алгоритма «Накопление» (файл «Пачка импульсов накопление) –
5. Наблюдение за работой алгоритма «Накопление» (файл «Пачка импульсов накопление) –
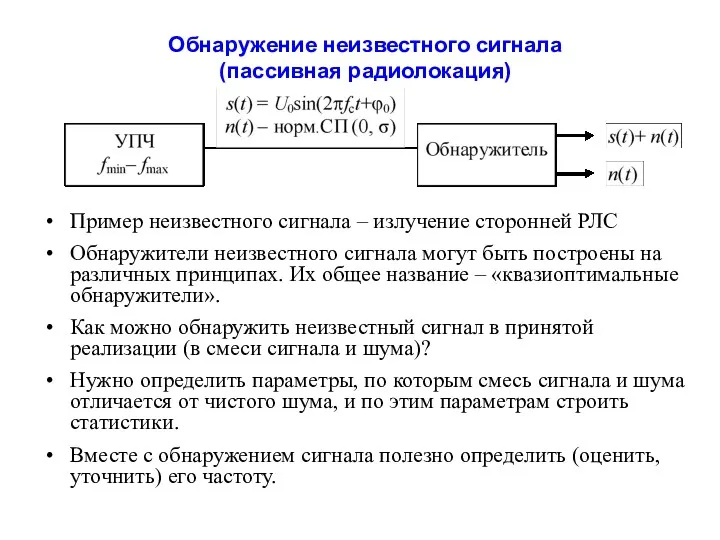
Обнаружение неизвестного сигнала
(пассивная радиолокация)
Пример неизвестного сигнала – излучение сторонней
Обнаружение неизвестного сигнала
(пассивная радиолокация)
Пример неизвестного сигнала – излучение сторонней
Алгоритмы квазиоптимальных обнаружителей
Как и в оптимальном алгоритме, в квазиоптимальном алгоритме на
Алгоритмы квазиоптимальных обнаружителей
Как и в оптимальном алгоритме, в квазиоптимальном алгоритме на
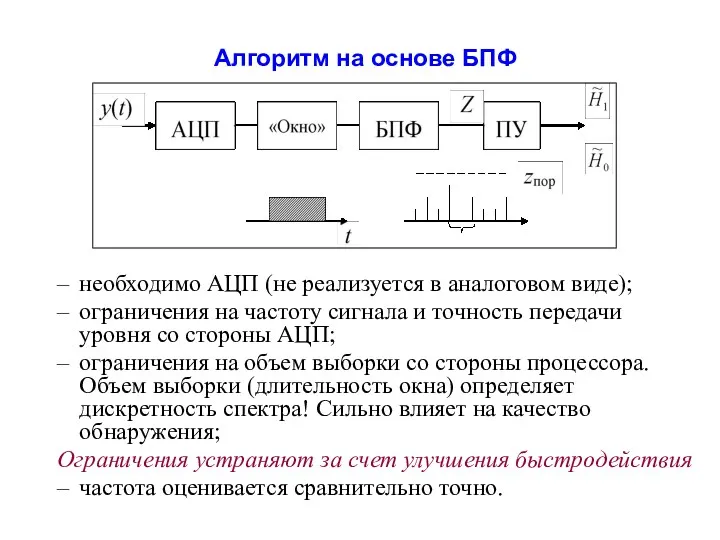
Алгоритм на основе БПФ
необходимо АЦП (не реализуется в аналоговом виде);
ограничения на
Алгоритм на основе БПФ
необходимо АЦП (не реализуется в аналоговом виде);
ограничения на
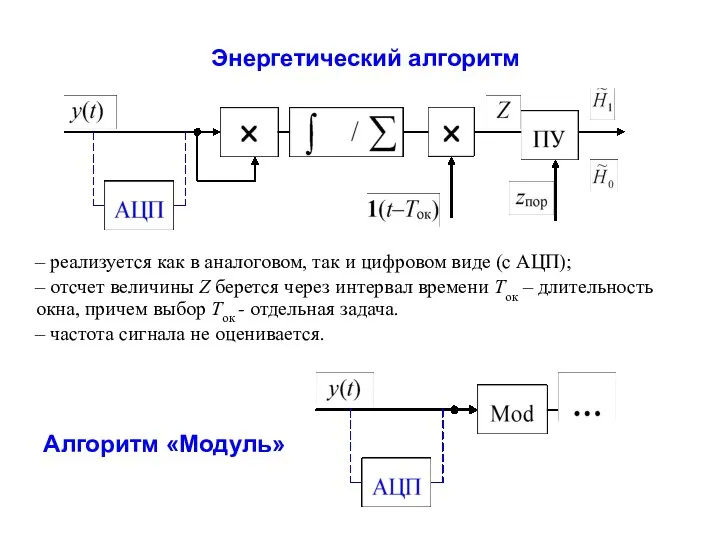
Энергетический алгоритм
реализуется как в аналоговом, так и цифровом виде (с
Энергетический алгоритм
реализуется как в аналоговом, так и цифровом виде (с
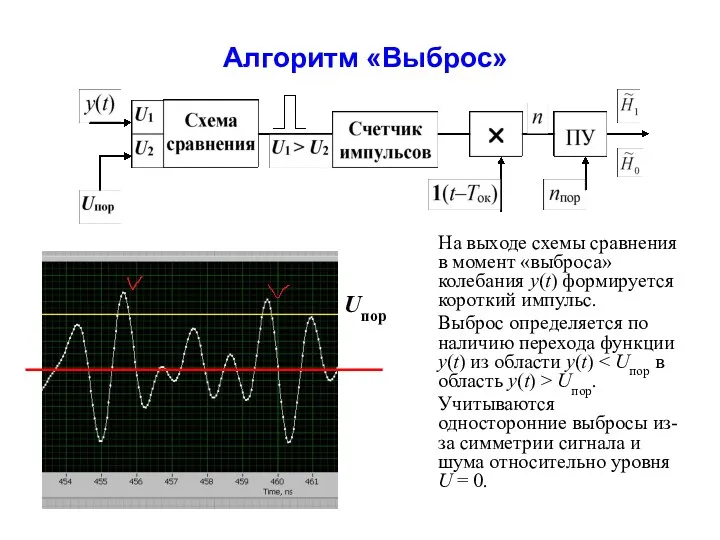
Алгоритм «Выброс»
На выходе схемы сравнения в момент «выброса» колебания y(t) формируется
Алгоритм «Выброс»
На выходе схемы сравнения в момент «выброса» колебания y(t) формируется
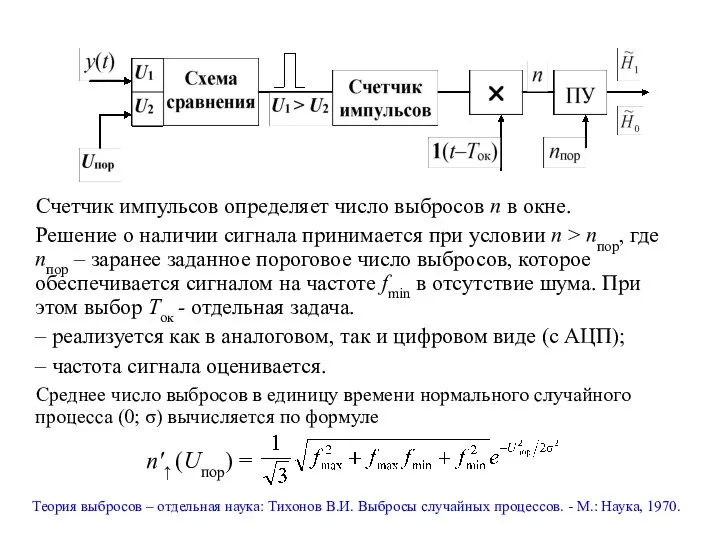
Счетчик импульсов определяет число выбросов n в окне.
Решение о наличии
Счетчик импульсов определяет число выбросов n в окне.
Решение о наличии
Пример выбора параметров алгоритма «Выброс»
Исходные данные о «неизвестном сигнале»:
fmin= 0,5 ГГц;
Пример выбора параметров алгоритма «Выброс»
Исходные данные о «неизвестном сигнале»:
fmin= 0,5 ГГц;
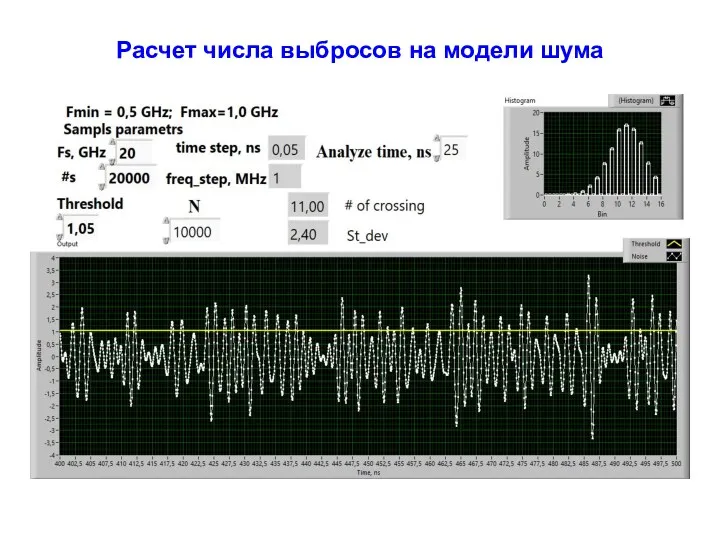
Расчет числа выбросов на модели шума
Расчет числа выбросов на модели шума
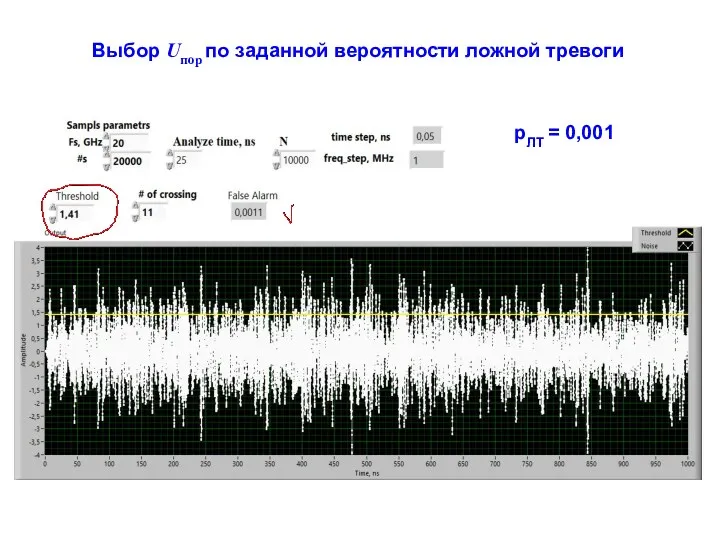
Выбор Uпор по заданной вероятности ложной тревоги
pЛТ = 0,001
Выбор Uпор по заданной вероятности ложной тревоги
pЛТ = 0,001
Задачи пассивной радиолокации
Рассматривается задача обнаружения и определения параметров «неизвестного излучения».
Термин «неизвестное
Задачи пассивной радиолокации
Рассматривается задача обнаружения и определения параметров «неизвестного излучения».
Термин «неизвестное
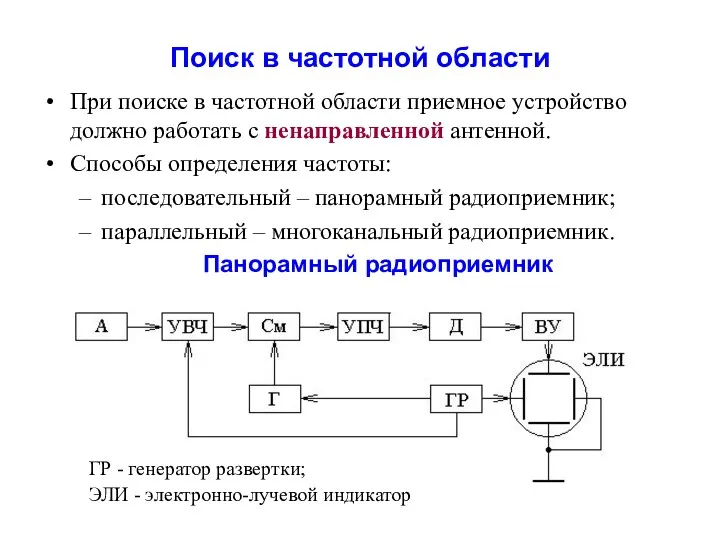
Поиск в частотной области
При поиске в частотной области приемное устройство должно
Поиск в частотной области
При поиске в частотной области приемное устройство должно

Российские панорамные приемники – П5-26, П5-27 и П5-28:
полоса частот 1,0 –
Российские панорамные приемники – П5-26, П5-27 и П5-28:
полоса частот 1,0 –
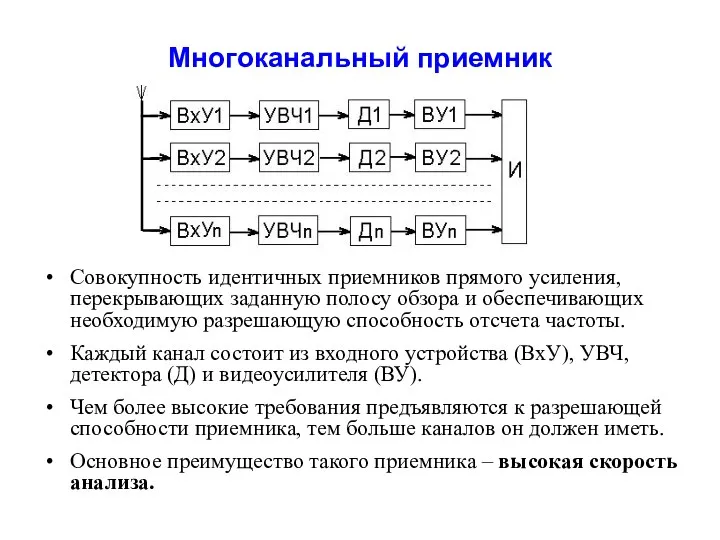
Многоканальный приемник
Совокупность идентичных приемников прямого усиления, перекрывающих заданную полосу обзора
Многоканальный приемник
Совокупность идентичных приемников прямого усиления, перекрывающих заданную полосу обзора
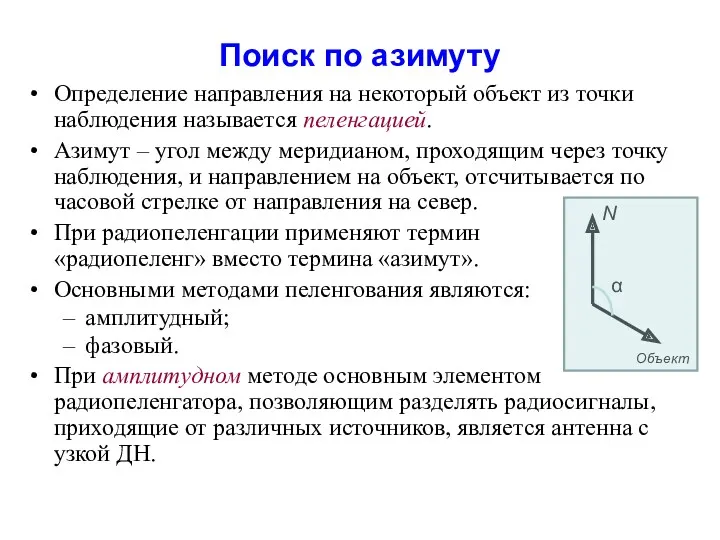
Поиск по азимуту
Определение направления на некоторый объект из точки наблюдения называется
Поиск по азимуту
Определение направления на некоторый объект из точки наблюдения называется
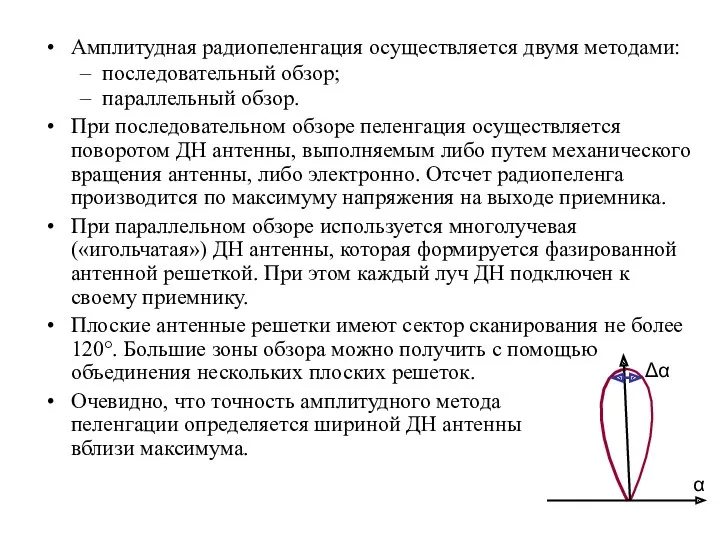
Амплитудная радиопеленгация осуществляется двумя методами:
последовательный обзор;
параллельный обзор.
При последовательном обзоре пеленгация осуществляется
Амплитудная радиопеленгация осуществляется двумя методами:
последовательный обзор;
параллельный обзор.
При последовательном обзоре пеленгация осуществляется
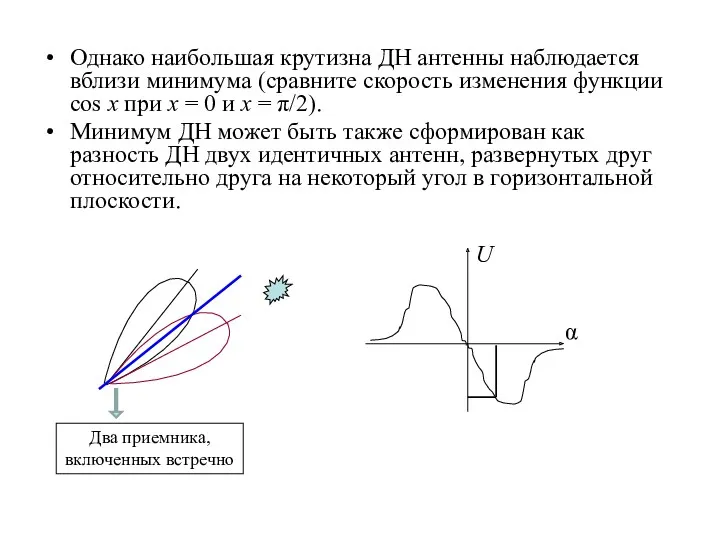
Однако наибольшая крутизна ДН антенны наблюдается вблизи минимума (сравните скорость изменения
Однако наибольшая крутизна ДН антенны наблюдается вблизи минимума (сравните скорость изменения
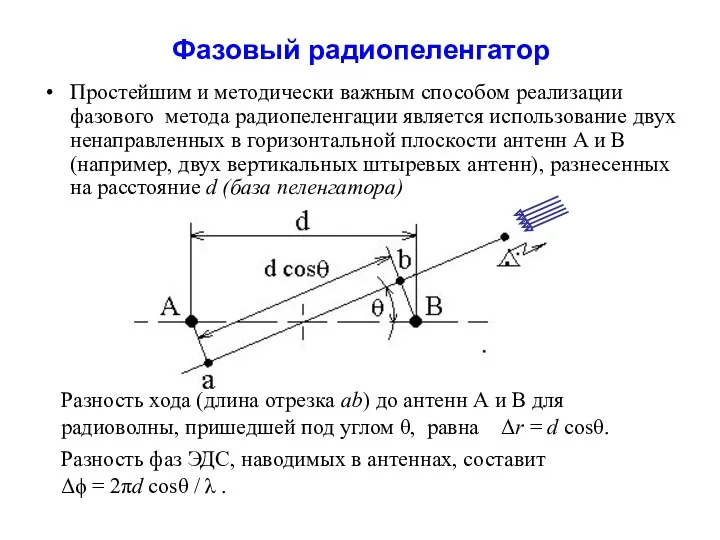
Фазовый радиопеленгатор
Простейшим и методически важным способом реализации фазового метода радиопеленгации является
Фазовый радиопеленгатор
Простейшим и методически важным способом реализации фазового метода радиопеленгации является
ФД
ЛинТракт
РПУ
ЛинТракт
РПУ
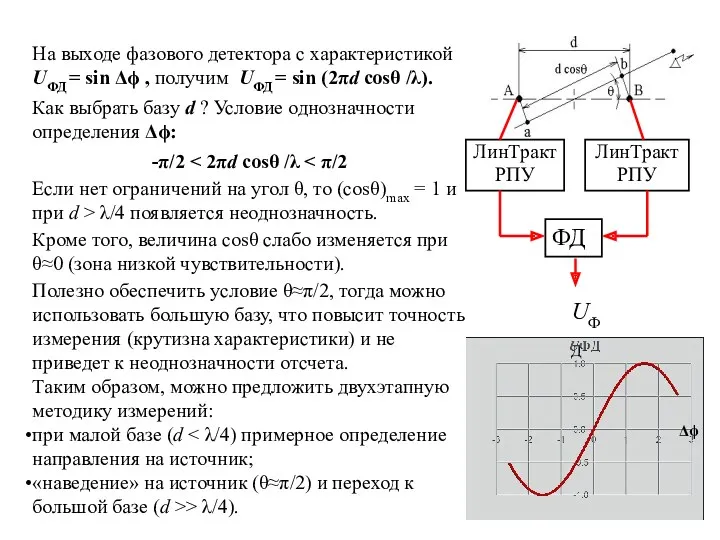
На выходе фазового детектора с характеристикой
UФД = sin Δϕ , получим
ФД
ЛинТракт
РПУ
ЛинТракт
РПУ
На выходе фазового детектора с характеристикой UФД = sin Δϕ , получим
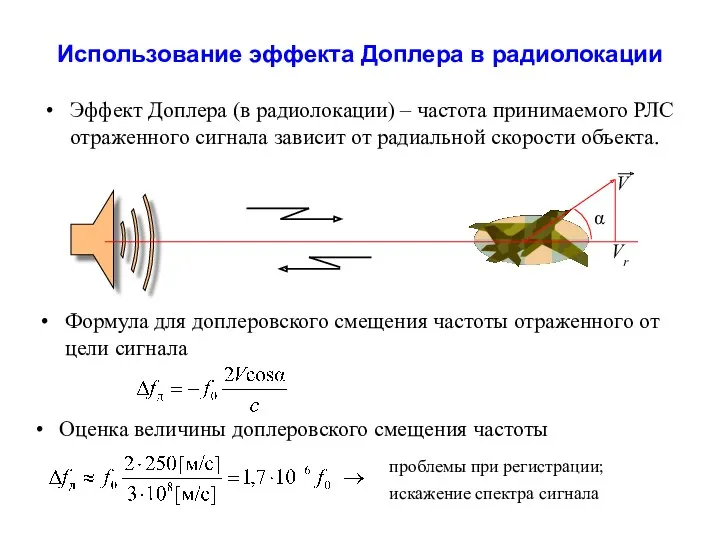
Использование эффекта Доплера в радиолокации
Эффект Доплера (в радиолокации) – частота принимаемого
Использование эффекта Доплера в радиолокации
Эффект Доплера (в радиолокации) – частота принимаемого
Как используется эффект Доплера?
Для измерения радиальной скорости цели (скорость можно измерить
Как используется эффект Доплера?
Для измерения радиальной скорости цели (скорость можно измерить
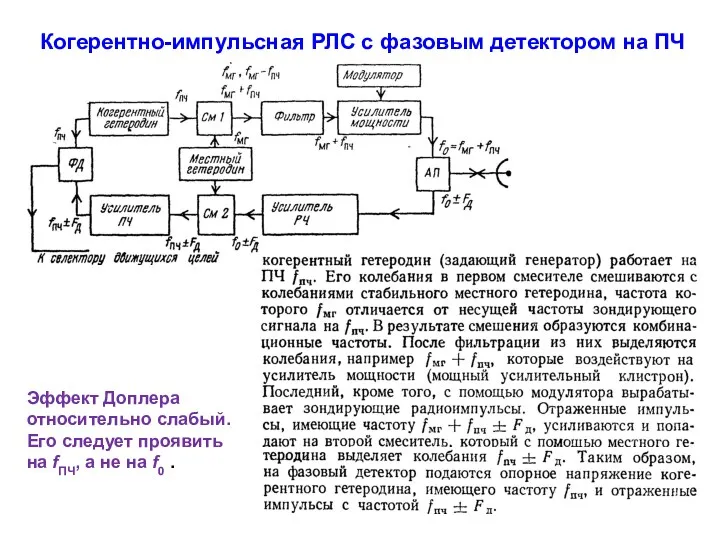
Когерентно-импульсная РЛС с фазовым детектором на ПЧ
Эффект Доплера относительно слабый.
Его
Когерентно-импульсная РЛС с фазовым детектором на ПЧ
Эффект Доплера относительно слабый.
Его
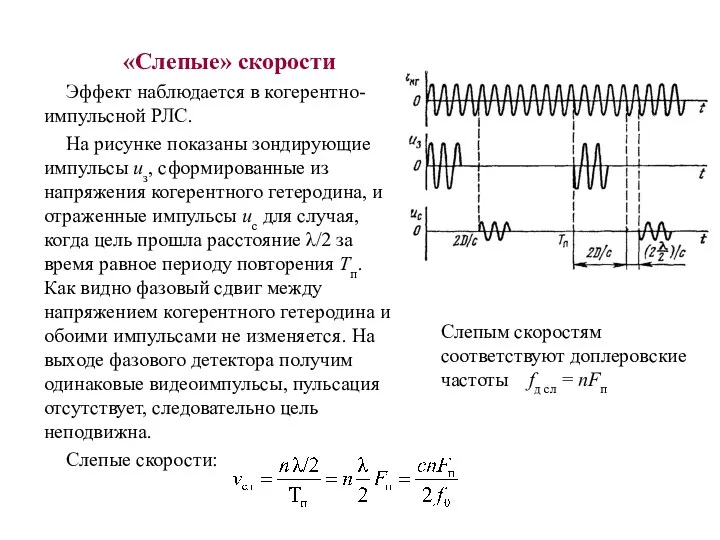
«Слепые» скорости
Эффект наблюдается в когерентно-импульсной РЛС.
На рисунке показаны зондирующие импульсы uз,
«Слепые» скорости
Эффект наблюдается в когерентно-импульсной РЛС.
На рисунке показаны зондирующие импульсы uз,
Доплеровский измеритель скорости
и угла сноса (ДИСС)
Рассмотрим горизонтальный полет:
W – путевая
Доплеровский измеритель скорости
и угла сноса (ДИСС)
Рассмотрим горизонтальный полет:
W – путевая
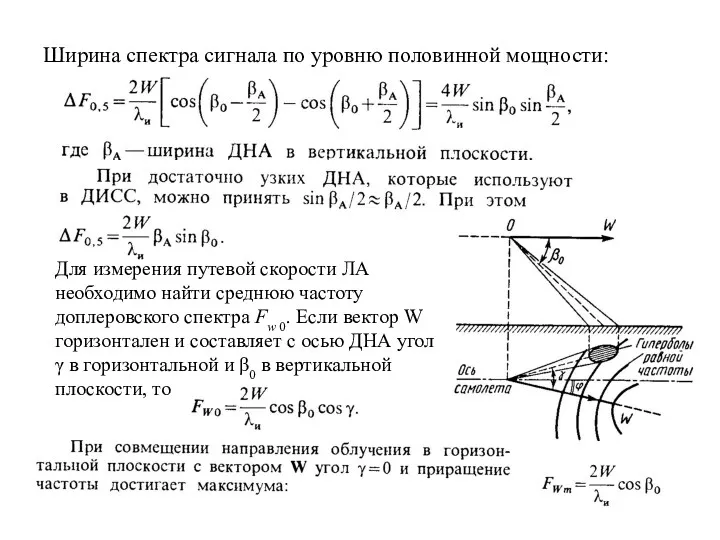
Ширина спектра сигнала по уровню половинной мощности:
Для измерения путевой скорости ЛА
Ширина спектра сигнала по уровню половинной мощности:
Для измерения путевой скорости ЛА
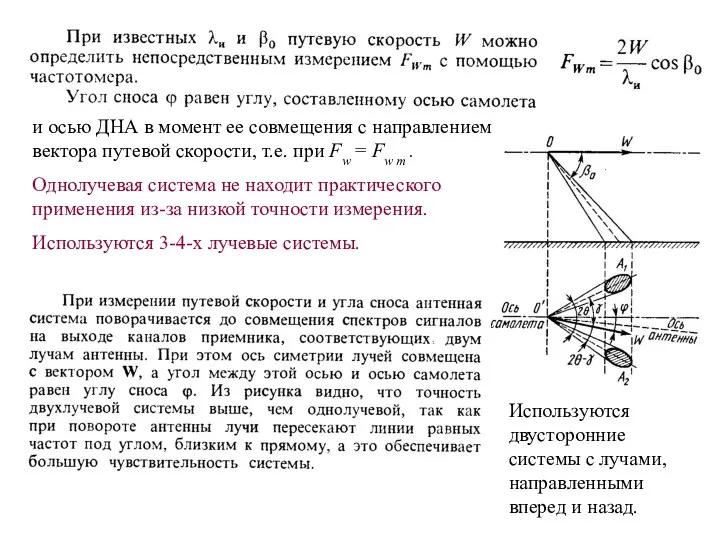
и осью ДНА в момент ее совмещения с направлением вектора путевой
и осью ДНА в момент ее совмещения с направлением вектора путевой
ДИСС-7
ДИСС-7 является доплеровским измерителем путевой скорости и угла сноса с непрерывным
ДИСС-7
ДИСС-7 является доплеровским измерителем путевой скорости и угла сноса с непрерывным
ДИСС-7
Антенна
Магнетрон
ДИСС-7
Антенна
Магнетрон
Радиовысотомер
Использует частотный метод определения дальности.
Использует непрерывное излучение. (Почему?)
Непрерывное изменение частоты по
Радиовысотомер
Использует частотный метод определения дальности.
Использует непрерывное излучение. (Почему?)
Непрерывное изменение частоты по
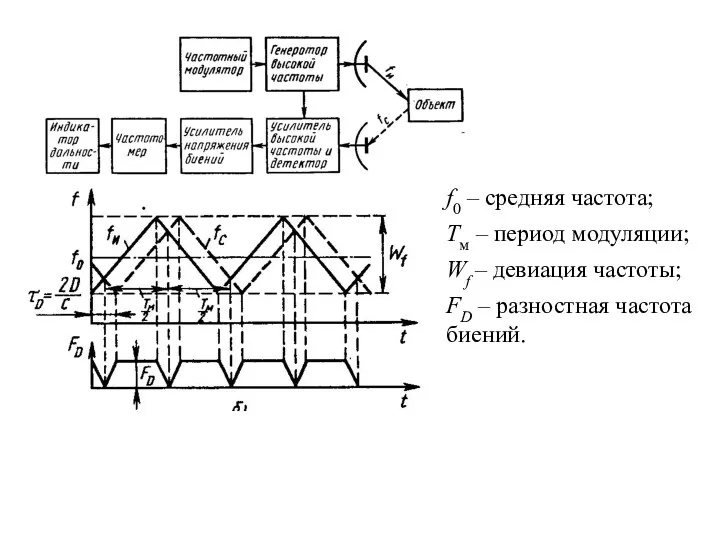
f0 – средняя частота;
Tм – период модуляции;
Wf – девиация частоты;
FD –
f0 – средняя частота;
Tм – период модуляции;
Wf – девиация частоты;
FD –
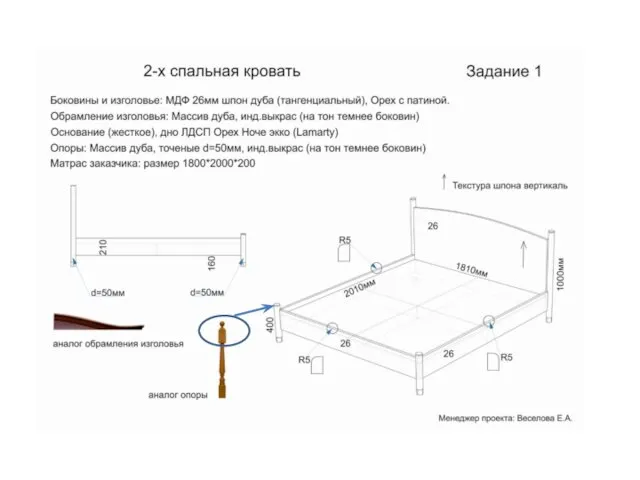 2-х спальная кровать
2-х спальная кровать орнамент в полосе
орнамент в полосе Получение экологически чистой энергии
Получение экологически чистой энергии Алгоритмизация и программирование
Алгоритмизация и программирование презентации по внеурочной деятельности ФГОС
презентации по внеурочной деятельности ФГОС 20231031_00076895-5ea6e36c
20231031_00076895-5ea6e36c Антропогенез
Антропогенез Социально-экономическая эффективность развития транспортной инфраструктуры
Социально-экономическая эффективность развития транспортной инфраструктуры Замки України
Замки України Подготовка к ОГЭ по истории
Подготовка к ОГЭ по истории 20230918_prezentatsiya_tehnicheskogo_proekta_po_tehnlogii_veshalka-sobaka_
20230918_prezentatsiya_tehnicheskogo_proekta_po_tehnlogii_veshalka-sobaka_ Компания IMPERIAL INVEST
Компания IMPERIAL INVEST Код благосостояния. Как увеличить доходы, зарплату и достичь карьерного роста
Код благосостояния. Как увеличить доходы, зарплату и достичь карьерного роста Хозяйство России: структурно-территориальные особенности
Хозяйство России: структурно-территориальные особенности Эволюция языков программирования
Эволюция языков программирования Что такое лес
Что такое лес Проект модернизации поста текущего ремонта, агрегатов для СТО
Проект модернизации поста текущего ремонта, агрегатов для СТО Монтаж, наладка и эксплуатация электрооборудования промышленных и гражданских зданий
Монтаж, наладка и эксплуатация электрооборудования промышленных и гражданских зданий Ученики задают вопросы
Ученики задают вопросы Основные функции контроля и оценивания учебных достижений
Основные функции контроля и оценивания учебных достижений Презентация к уроку:Дифференциация звуков и букв т – д в слогах, словах, предложениях.
Презентация к уроку:Дифференциация звуков и букв т – д в слогах, словах, предложениях. Автоматты қайта қосылу
Автоматты қайта қосылу Расчет по второй группе предельных состояний ЖБК. (Тема 12)
Расчет по второй группе предельных состояний ЖБК. (Тема 12) Московское толкование
Московское толкование Родительское собрание совместно с учащимися по теме: Проблемы нравственности и этики поведения в классном коллективе.
Родительское собрание совместно с учащимися по теме: Проблемы нравственности и этики поведения в классном коллективе. Светофор-Семафорович
Светофор-Семафорович презентация История вязания. Инструменты и материалы
презентация История вязания. Инструменты и материалы Презентация к уроку технологии в 1 классе. Тема: Лепим из пластилина Мышиное семейство
Презентация к уроку технологии в 1 классе. Тема: Лепим из пластилина Мышиное семейство