Первичные электрические преобразователи механических величин. Принципы работы, область применения, классификация презентация
- Первичные электрические преобразователи механических величин. Принципы работы, область применения, классификация

Содержание
- 2. Первичные измерительные преобразователи Первичные измерительные преобразователи (датчики) в ИИС обеспечивают преобразование некоторой физической величины в электрическую
- 3. Различают датчики генераторного типа, когда выходной величиной является ток, напряжение или электрический заряд, и параметрические, когда
- 4. Характеристиками датчиков являются следующие показатели. Функция преобразования. Ее вид определяется принципом работы датчика. Она может быть
- 5. Диапазон значений преобразуемой величины. Диапазон значений выходной величины. Характеристики погрешности: нелинейность, погрешность задания чувствительности, нестабильность, насыщение,
- 6. Датчики электрических величин К простейшим первичным преобразователям для измерения электрических величин можно отнести шунты, используемые при
- 7. Датчики магнитных величин Датчики для измерения напряженности магнитного поля строятся на основе эффекта Холла и эффекта
- 8. Датчики линейных и угловых перемещений, кон тактирующие с измеряемой деталью Самым распространенным и относительно дешевым датчиком
- 9. Бесконтактные датчики координат Бесконтактные датчики координат бывают двух основных видов: на приборах с зарядовой связью (ПЗС)
- 10. По принципу действия датчики можно разделить на два класса: генераторные и параметрические (датчики-модуляторы). Генераторные датчики осуществляют
- 11. Различают три класса датчиков: - аналоговые датчики, т. е. датчики, вырабатывающие аналоговый сигнал, пропорционально изменению входной
- 12. Требования, предъявляемые к датчикам: - однозначная зависимость выходной величины от входной; - стабильность характеристик во времени;
- 13. Параметрические датчики Входную величину X преобразуют в изменение какого-либо электрического параметра (R, L или C) датчика.
- 14. Омические (резистивные) датчики принцип действия основан на изменении их активного сопротивления при изменении длины l, площади
- 16. Скачать презентацию
Первичные измерительные преобразователи
Первичные измерительные преобразователи (датчики) в ИИС обеспечивают преобразование
Первичные измерительные преобразователи
Первичные измерительные преобразователи (датчики) в ИИС обеспечивают преобразование
Различают датчики генераторного типа, когда выходной величиной является ток, напряжение или
Различают датчики генераторного типа, когда выходной величиной является ток, напряжение или

Характеристиками датчиков являются следующие показатели. Функция преобразования. Ее вид определяется принципом
Характеристиками датчиков являются следующие показатели. Функция преобразования. Ее вид определяется принципом

Диапазон значений преобразуемой величины.
Диапазон значений выходной величины. Характеристики погрешности: нелинейность, погрешность
Диапазон значений преобразуемой величины.
Диапазон значений выходной величины. Характеристики погрешности: нелинейность, погрешность
Датчики электрических величин
К простейшим первичным преобразователям для измерения электрических величин можно
Датчики электрических величин
К простейшим первичным преобразователям для измерения электрических величин можно
Датчики магнитных величин
Датчики для измерения напряженности магнитного поля строятся на основе
Датчики магнитных величин
Датчики для измерения напряженности магнитного поля строятся на основе
Датчики линейных и угловых перемещений, кон тактирующие с измеряемой деталью Самым
Датчики линейных и угловых перемещений, кон тактирующие с измеряемой деталью Самым
Бесконтактные датчики координат Бесконтактные датчики координат бывают двух основных видов: на
Бесконтактные датчики координат Бесконтактные датчики координат бывают двух основных видов: на
По принципу действия датчики можно разделить на два класса: генераторные и
По принципу действия датчики можно разделить на два класса: генераторные и
Различают три класса датчиков:
- аналоговые датчики, т. е. датчики, вырабатывающие аналоговый
Различают три класса датчиков:
- аналоговые датчики, т. е. датчики, вырабатывающие аналоговый
Требования, предъявляемые к датчикам:
- однозначная зависимость выходной величины от входной;
- стабильность
Требования, предъявляемые к датчикам:
- однозначная зависимость выходной величины от входной;
- стабильность
Параметрические датчики
Входную величину X преобразуют в изменение какого-либо электрического параметра (R,
Параметрические датчики
Входную величину X преобразуют в изменение какого-либо электрического параметра (R,
Омические (резистивные) датчики
принцип действия основан на изменении их активного
Омические (резистивные) датчики
принцип действия основан на изменении их активного
 Как вести себя рядом с энергообъектами
Как вести себя рядом с энергообъектами Жизненный и творческий путь Афанасия Афанасьевича Фета. (1820г.-1892г.)
Жизненный и творческий путь Афанасия Афанасьевича Фета. (1820г.-1892г.) Тези до законопроектів щодо запровадження накопичувальної системи пенсій
Тези до законопроектів щодо запровадження накопичувальної системи пенсій Универсальные семейные ценности
Универсальные семейные ценности Работа с учетными записями пользователей в Windows. 10 подробное руководство
Работа с учетными записями пользователей в Windows. 10 подробное руководство Светлая Пасха. История и традиции
Светлая Пасха. История и традиции Занятие 2 Тема 2 Управление ТС в штатных ситуациях
Занятие 2 Тема 2 Управление ТС в штатных ситуациях Страхование спортсменов
Страхование спортсменов Сказочный городок
Сказочный городок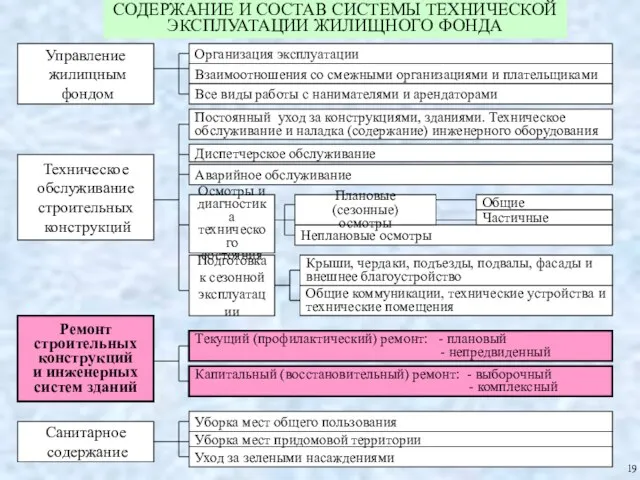 Основные положения по организации и производству ремонтно-строительных работ
Основные положения по организации и производству ремонтно-строительных работ Электронное строение атома. 11 класс.
Электронное строение атома. 11 класс. Этикет. История этикета
Этикет. История этикета Техническая эксплуатация сооружений и устройств путевого хозяйства
Техническая эксплуатация сооружений и устройств путевого хозяйства Сказочный город
Сказочный город Коммерческое предложение. Онлайн-касса Эвотор
Коммерческое предложение. Онлайн-касса Эвотор Неметаллы
Неметаллы Чрезвычайные ситуации химического характера
Чрезвычайные ситуации химического характера Распознавание пластмасс и волокон. Лабораторная работа
Распознавание пластмасс и волокон. Лабораторная работа История создания термометра
История создания термометра Автоматизация и ее применение
Автоматизация и ее применение Художники Марий Эл
Художники Марий Эл Презентация География в танце
Презентация География в танце История и методы изучения клетки. Клеточная теория
История и методы изучения клетки. Клеточная теория Даниил Гранин
Даниил Гранин презентация Фосфор, соединения фосфора
презентация Фосфор, соединения фосфора Социальная политика государства и управление социальным развитием организации (Россия и Сингапур)
Социальная политика государства и управление социальным развитием организации (Россия и Сингапур) Игил - Исламское государство
Игил - Исламское государство Эрзянский народный зимний календарь
Эрзянский народный зимний календарь