- Плановое съемочное обоснование

Содержание
- 2. Классификация съемок Комплекс работ, в результате выполнения которого получают карту или план местности, называют топографической съемкой.
- 3. Наземную съемку применяют при создании крупномасштабных планов небольших участков. Наземная съемка выполняется с поверхности земли. В
- 4. тахеометрическая; мензульная; теодолитная; при этой съемке получают план участка местности, на котором нет изображения рельефа; вертикальная;
- 5. Теодолитная съемка местности в простейшем варианте выполняется с помощью теодолита и рулетки в два этапа: создание
- 6. По форме теодолитный ход может быть разомкнутым − опирающимся на два исходных пункта и два исходных
- 7. Схемы теодолитных ходов а – разомкнутого; б – замкнутого; в– висячего
- 8. Места для точек хода выбирают так, чтобы обеспечить взаимную видимость между ними, благоприятные условия для съемки
- 9. При съемке ситуации положение отдельных точек определяют относительно пунктов съемочного обоснования и линий, соединяющих их, применяются:
- 10. При угловой засечке положение точки 1 определяют относительно двух пунктов съемочного обоснования А и В с
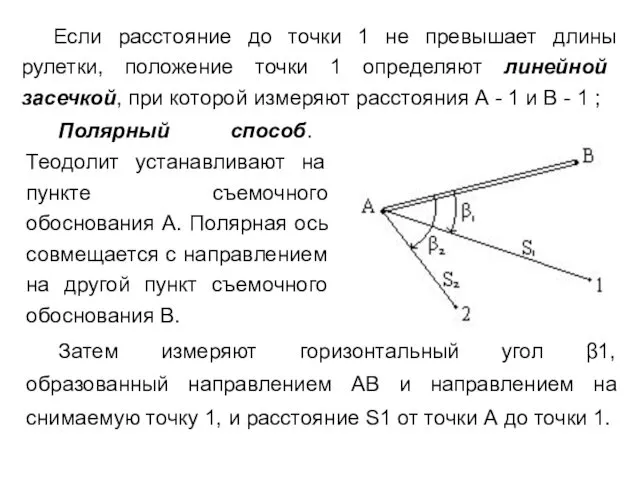
- 11. Если расстояние до точки 1 не превышает длины рулетки, положение точки 1 определяют линейной засечкой, при
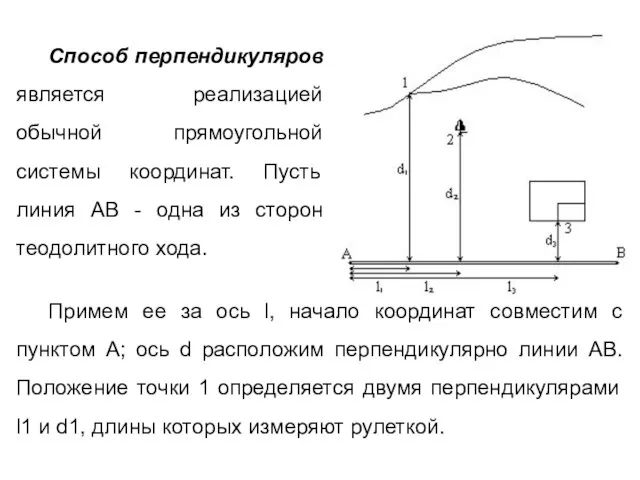
- 12. Способ перпендикуляров является реализацией обычной прямоугольной системы координат. Пусть линия АВ - одна из сторон теодолитного
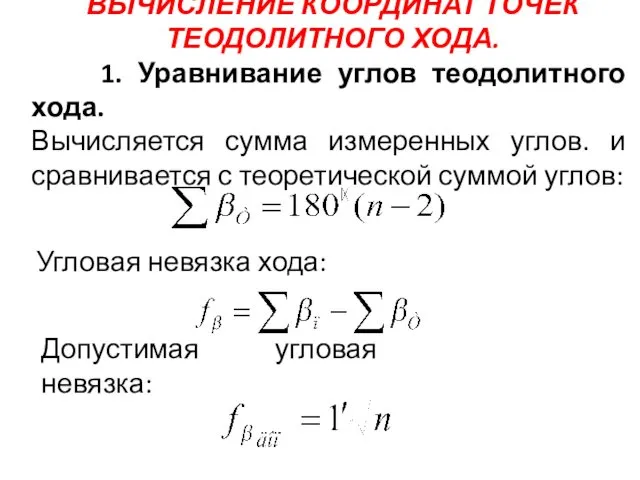
- 13. ВЫЧИСЛЕНИЕ КООРДИНАТ ТОЧЕК ТЕОДОЛИТНОГО ХОДА. 1. Уравнивание углов теодолитного хода. Вычисляется сумма измеренных углов. и сравнивается
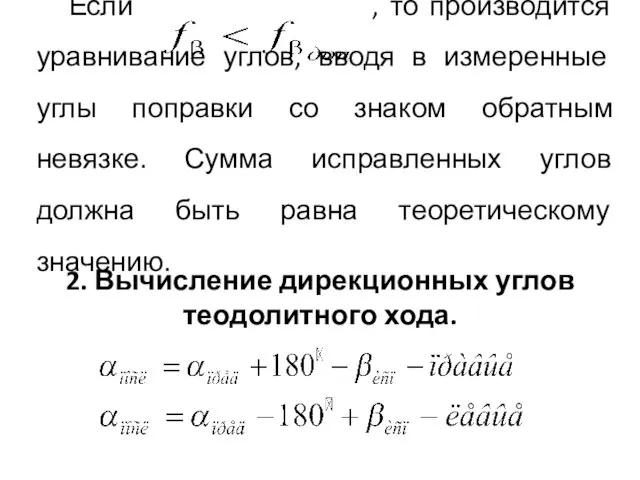
- 14. Если , то производится уравнивание углов, вводя в измеренные углы поправки со знаком обратным невязке. Сумма
- 15. 3. Вычисление румбов. Румбы вычисляются по формулам связи, между дирекционными углами и румбами. 4. Вычисление приращений
- 16. Затем определяются невязки в приращениях координат: для замкнутого хода для разомкнутого хода
- 17. Определяются линейная и относительная невязки хода:
- 18. Вводятся поправки, вычисляемые по формулам: ; .
- 19. Производят проверку: 5. Вычисление координат точек теодолитного хода. Координаты точек вычисляют последовательно по формулам:
- 21. Скачать презентацию
Классификация съемок
Комплекс работ, в результате выполнения которого получают карту или план
Классификация съемок
Комплекс работ, в результате выполнения которого получают карту или план
Наземную съемку применяют при создании крупномасштабных планов небольших участков.
Наземная съемка выполняется
Наземную съемку применяют при создании крупномасштабных планов небольших участков.
Наземная съемка выполняется
тахеометрическая;
мензульная;
теодолитная; при этой съемке получают план участка местности, на
тахеометрическая;
мензульная;
теодолитная; при этой съемке получают план участка местности, на
Теодолитная съемка местности в простейшем варианте выполняется с помощью теодолита и
Теодолитная съемка местности в простейшем варианте выполняется с помощью теодолита и
По форме теодолитный ход может быть
разомкнутым − опирающимся на два
По форме теодолитный ход может быть
разомкнутым − опирающимся на два

Схемы теодолитных ходов
а – разомкнутого; б – замкнутого; в– висячего
Схемы теодолитных ходов
а – разомкнутого; б – замкнутого; в– висячего
Места для точек хода выбирают так, чтобы обеспечить взаимную видимость между
Места для точек хода выбирают так, чтобы обеспечить взаимную видимость между
При съемке ситуации положение отдельных точек определяют относительно пунктов съемочного обоснования
При съемке ситуации положение отдельных точек определяют относительно пунктов съемочного обоснования
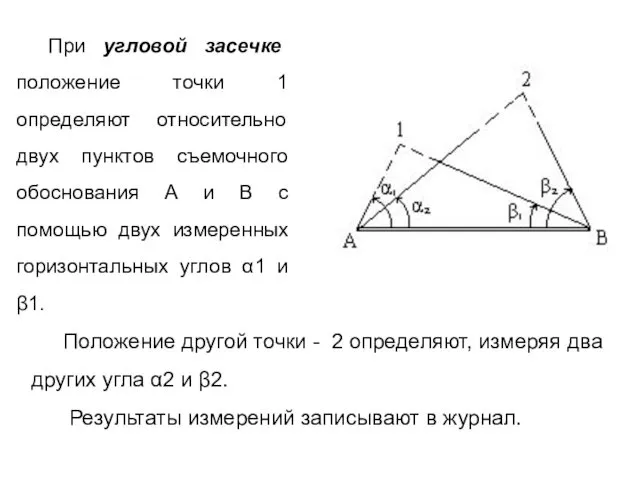
При угловой засечке положение точки 1 определяют относительно двух пунктов съемочного
При угловой засечке положение точки 1 определяют относительно двух пунктов съемочного
Если расстояние до точки 1 не превышает длины рулетки, положение точки
Если расстояние до точки 1 не превышает длины рулетки, положение точки
Способ перпендикуляров является реализацией обычной прямоугольной системы координат. Пусть линия АВ
Способ перпендикуляров является реализацией обычной прямоугольной системы координат. Пусть линия АВ
ВЫЧИСЛЕНИЕ КООРДИНАТ ТОЧЕК ТЕОДОЛИТНОГО ХОДА.
1. Уравнивание углов теодолитного хода.
Вычисляется сумма
ВЫЧИСЛЕНИЕ КООРДИНАТ ТОЧЕК ТЕОДОЛИТНОГО ХОДА.
1. Уравнивание углов теодолитного хода.
Вычисляется сумма
Если , то производится уравнивание углов, вводя в измеренные углы поправки
Если , то производится уравнивание углов, вводя в измеренные углы поправки
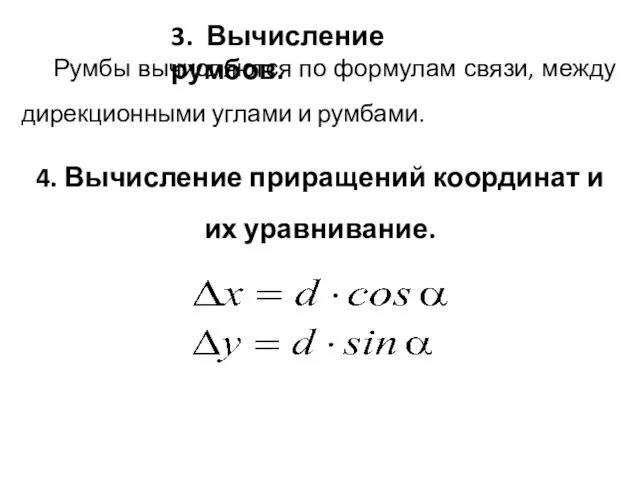
3. Вычисление румбов.
Румбы вычисляются по формулам связи, между дирекционными углами и
3. Вычисление румбов.
Румбы вычисляются по формулам связи, между дирекционными углами и
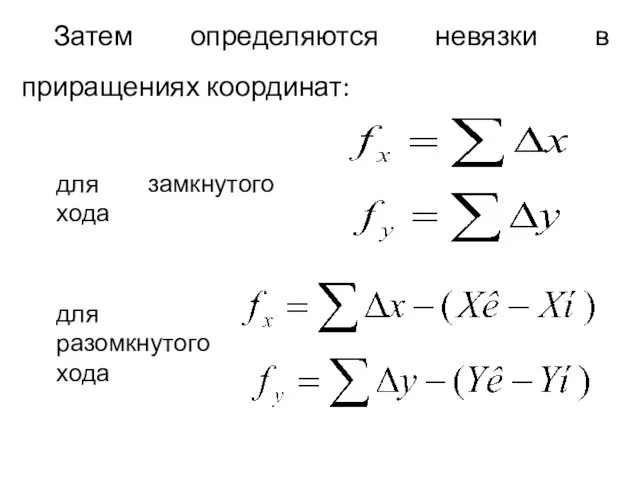
Затем определяются невязки в приращениях координат:
для замкнутого хода
для разомкнутого хода
Затем определяются невязки в приращениях координат:
для замкнутого хода
для разомкнутого хода
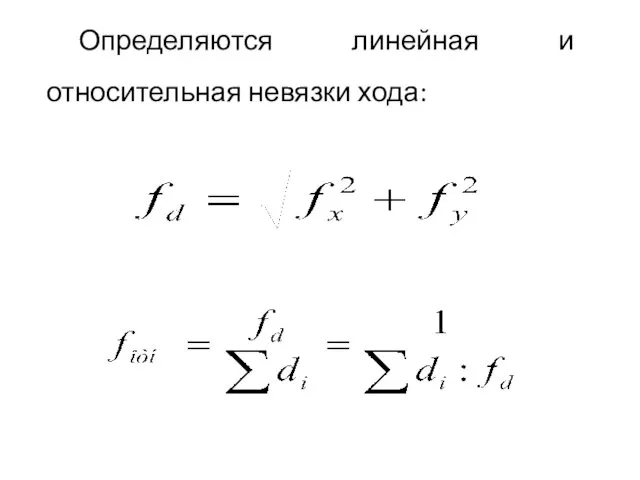
Определяются линейная и относительная невязки хода:
Определяются линейная и относительная невязки хода:
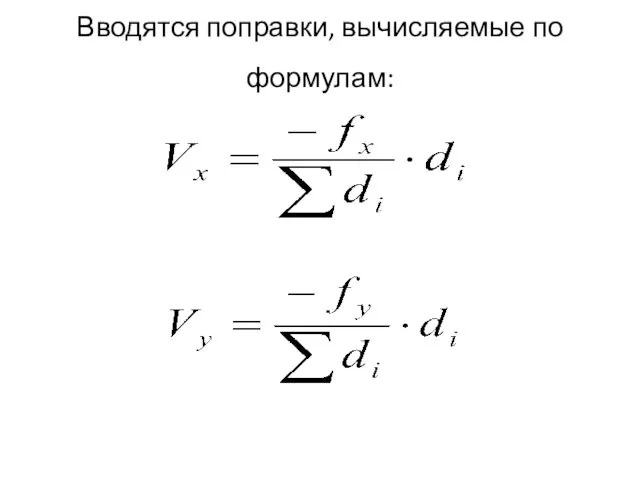
Вводятся поправки, вычисляемые по формулам:
;
.
Вводятся поправки, вычисляемые по формулам:
;
.
Производят проверку:
5. Вычисление координат точек теодолитного хода.
Координаты точек вычисляют последовательно по
Производят проверку:
5. Вычисление координат точек теодолитного хода.
Координаты точек вычисляют последовательно по
 Отличие американского и британского вариантов английского языка
Отличие американского и британского вариантов английского языка Развитие мелкой моторики у детей дошкольного возраста на занятиях по тестопластике.
Развитие мелкой моторики у детей дошкольного возраста на занятиях по тестопластике. Влажность воздуха и способы её измерения
Влажность воздуха и способы её измерения Развитие форм государственной социальной поддержки инвалидов в Ханты-Мансийском автономном округе - Югре
Развитие форм государственной социальной поддержки инвалидов в Ханты-Мансийском автономном округе - Югре Технология производства жидкого дыма
Технология производства жидкого дыма Картографическая проекция
Картографическая проекция Цікаві факти про акул
Цікаві факти про акул Галогенопроизводные углеводородов
Галогенопроизводные углеводородов Презентация Фиалки ко Дню Матери
Презентация Фиалки ко Дню Матери Организация хранения и транспортировки ЛС, ИМН и медицинской техники
Организация хранения и транспортировки ЛС, ИМН и медицинской техники Презентация Береги свою планету
Презентация Береги свою планету Компоновка и расчет каркаса многоэтажных зданий
Компоновка и расчет каркаса многоэтажных зданий Мальчик с пальчик
Мальчик с пальчик презентация по краеведению город Артем
презентация по краеведению город Артем Аттестация на I квалификационную категорию.
Аттестация на I квалификационную категорию. Текстовые редакторы. Урок 10
Текстовые редакторы. Урок 10 Введение в кибернетику. Основы теории автоматического регулирования
Введение в кибернетику. Основы теории автоматического регулирования Транспортные и инженерные коммуникации. Лекция № 10
Транспортные и инженерные коммуникации. Лекция № 10 Какие денежные средства в банке не являются застрахованными
Какие денежные средства в банке не являются застрахованными Всероссийская проверочная работа. История 5 класс
Всероссийская проверочная работа. История 5 класс Вирусты гепатит С
Вирусты гепатит С Инженерная и компьютерная график. Стандартные крепежные резьбовые детали, тема 4
Инженерная и компьютерная график. Стандартные крепежные резьбовые детали, тема 4 Русский космизм
Русский космизм Презентация по теме Виды химической связи
Презентация по теме Виды химической связи Туберкулез ошақтары
Туберкулез ошақтары Строительство жилых домов в г. Владивостоке
Строительство жилых домов в г. Владивостоке Взаимодействие семьи с образовательными институтами
Взаимодействие семьи с образовательными институтами Бумажная продукция
Бумажная продукция