- Помехи радиолокационному наблюдению и борьба с ними

Содержание
- 2. ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ Принятая реализация при отсутствии внешних помех записывается в виде y(t)
- 3. Теоретические основы радиолокации Общие методы защиты от помех С точки зрения воздействия активных помех на системы
- 4. Различия между сигналом и помехой которые могут быть использованы в целях защиты РЛС от активных помех:
- 5. Методы защиты от активных помех Перестройка несущей частоты – при реализации этого метода защиты РЛС от
- 6. Оптимальная фильтрация – сводится к построению передаточной функции фильтра, при которой на выходе фильтра отношение мощности
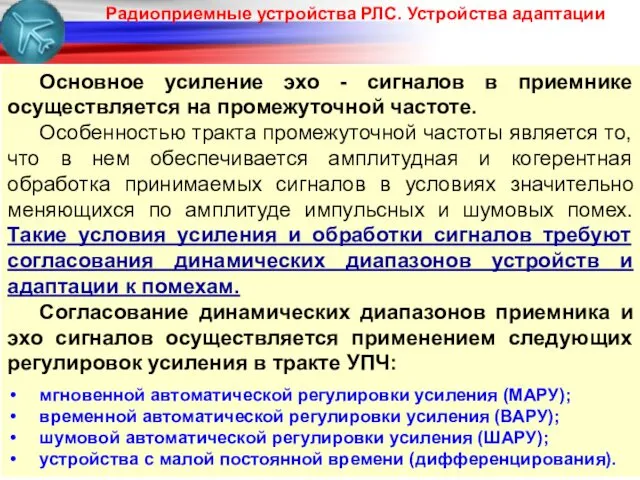
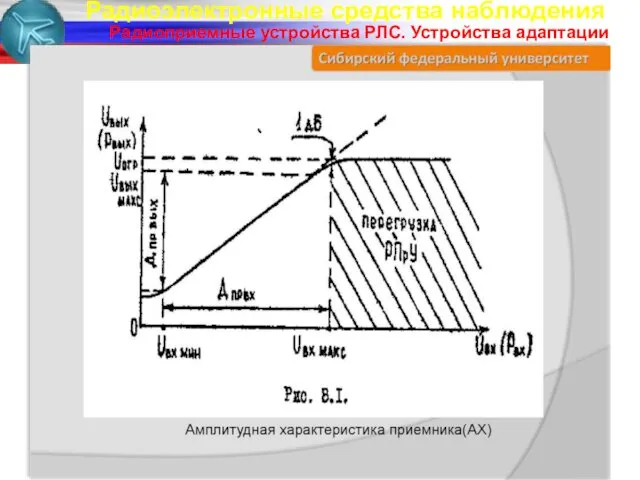
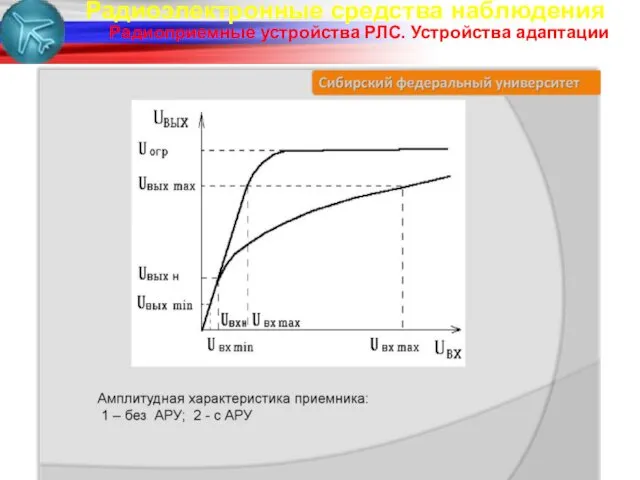
- 7. Радиоприемные устройства РЛС. Устройства адаптации Основное усиление эхо - сигналов в приемнике осуществляется на промежуточной частоте.
- 8. Радиоэлектронные средства наблюдения Радиоприемные устройства РЛС. Устройства адаптации
- 9. Радиоэлектронные средства наблюдения Радиоприемные устройства РЛС. Устройства адаптации
- 10. Радиоэлектронные средства наблюдения Радиоприемные устройства РЛС. Устройства адаптации
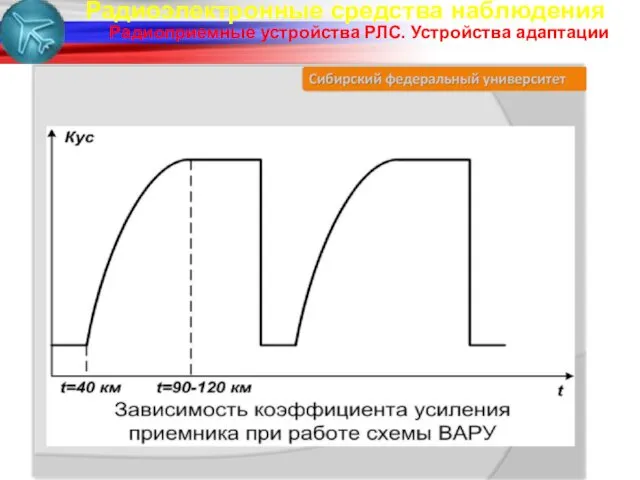
- 11. Радиоэлектронные средства наблюдения Радиоприемные устройства РЛС. Устройства адаптации Схема ВАРУ позволяет путем изменения коэффициента усиления УПЧ
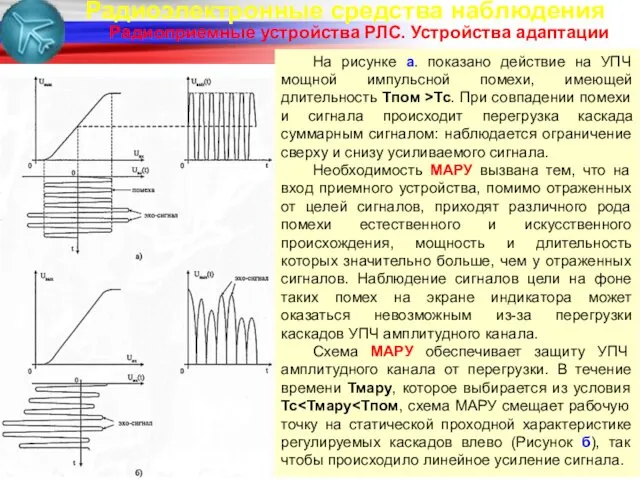
- 12. Радиоэлектронные средства наблюдения Радиоприемные устройства РЛС. Устройства адаптации На рисунке а. показано действие на УПЧ мощной
- 13. Радиоприемные устройства РЛС. Устройства адаптации Система шумовой автоматической регулировки усиления (ШАРУ) обеспечивает стабилизацию вероятности ложных тревог.
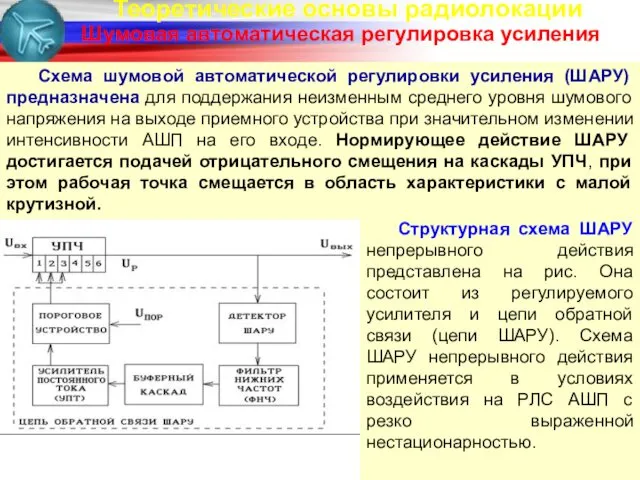
- 14. Теоретические основы радиолокации Схема шумовой автоматической регулировки усиления (ШАРУ) предназначена для поддержания неизменным среднего уровня шумового
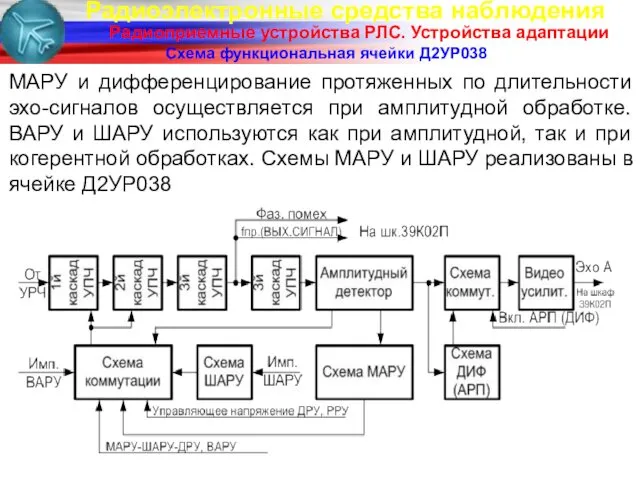
- 15. Радиоэлектронные средства наблюдения Радиоприемные устройства РЛС. Устройства адаптации Схема функциональная ячейки Д2УР038 МАРУ и дифференцирование протяженных
- 16. Радиоэлектронные средства наблюдения Радиоприемные устройства РЛС. Устройства адаптации Включение схемы МАРУ производится дистанционно с блока 394ЮП01
- 17. ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ Методы защиты от пассивных маскирующих помех 1. Распределенный характер мешающих
- 18. Теоретические основы радиолокации Для того чтобы сравнить фазы отраженного и зондирующего сигналов, необходимо сформировать опорное или
- 19. ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ Различают несколько видов обеспечения когерентности колебаний. Истинная внутренняя когерентность достигается
- 20. 1. Схема РЛС, работающей когерентно-импульсным методом Когерентно-импульсный метод радиолокации 2. Фазовые соотношения между когерентным напряжением и
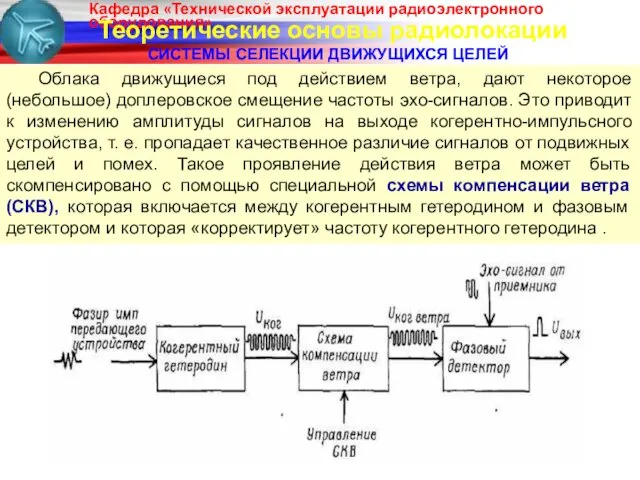
- 21. Теоретические основы радиолокации СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ Облака движущиеся под действием ветра, дают некоторое (небольшое) доплеровское
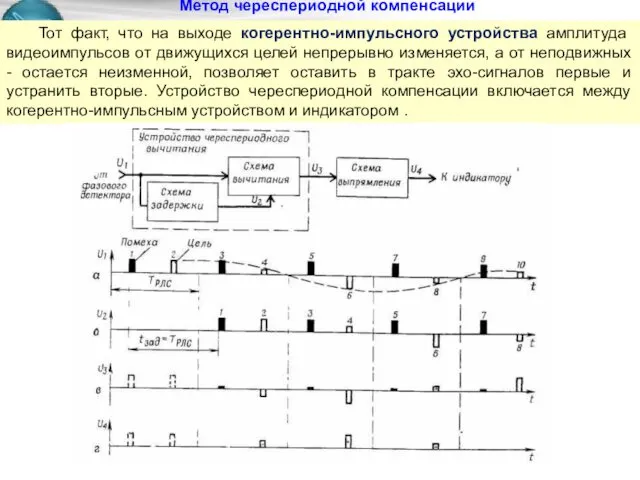
- 22. Метод череспериодной компенсации Тот факт, что на выходе когерентно-импульсного устройства амплитуда видеоимпульсов от движущихся целей непрерывно
- 23. Выходные импульсы фазового детектора поступают на схему вычитания и схему задержки. Каждый эхо-сигнал, задержанный на время,
- 24. Теоретические основы радиолокации СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ Одним из основных недостатков когерентно-импульсного метода являются так называемые
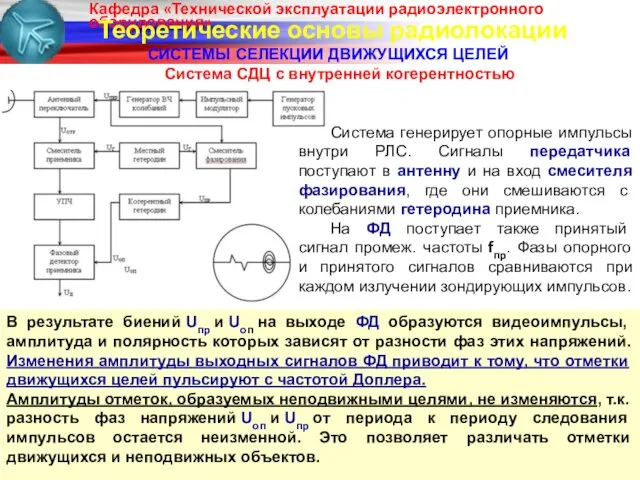
- 25. Теоретические основы радиолокации СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ Система СДЦ с внутренней когерентностью
- 26. Теоретические основы радиолокации СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ Система СДЦ с внутренней когерентностью В результате биений Uпр
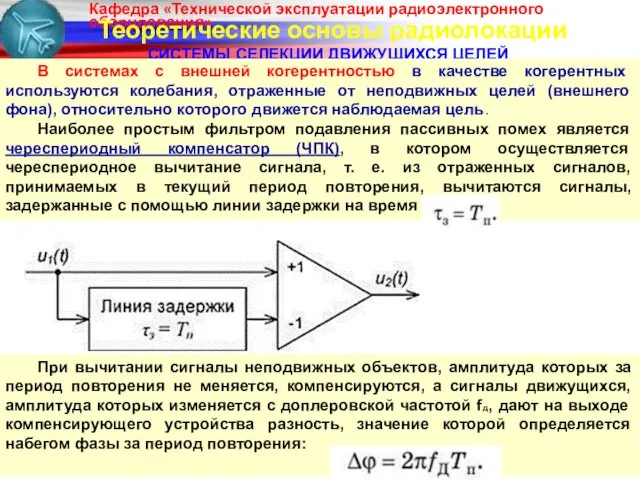
- 27. Теоретические основы радиолокации СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ В системах с внешней когерентностью в качестве когерентных используются
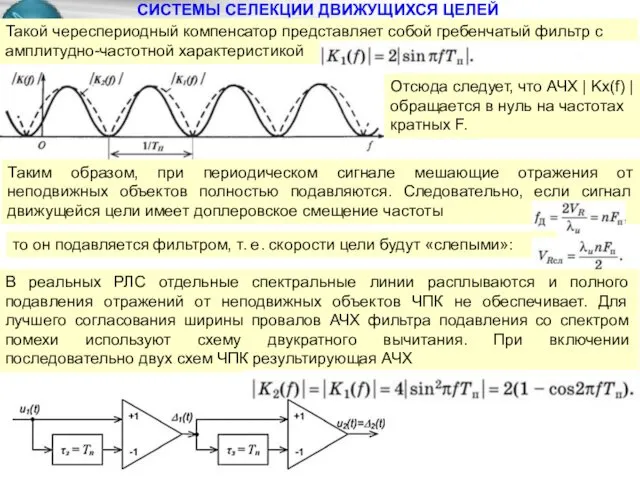
- 28. СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ Такой череспериодный компенсатор представляет собой гребенчатый фильтр с амплитудно-частотной характеристикой Таким образом,
- 30. Скачать презентацию
ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ
Принятая реализация при отсутствии внешних помех
ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ
Принятая реализация при отсутствии внешних помех
Теоретические основы радиолокации
Общие методы защиты от помех
С точки зрения воздействия активных
Теоретические основы радиолокации
Общие методы защиты от помех
С точки зрения воздействия активных
Различия между сигналом и помехой которые могут быть использованы в целях
Различия между сигналом и помехой которые могут быть использованы в целях
Методы защиты от активных помех
Перестройка несущей частоты – при реализации этого
Методы защиты от активных помех
Перестройка несущей частоты – при реализации этого
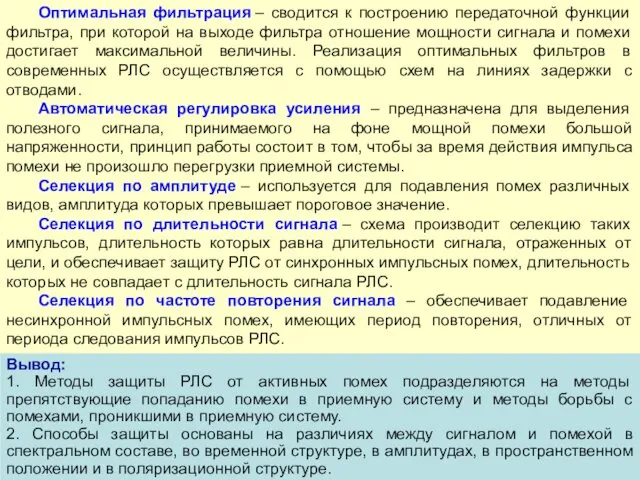
Оптимальная фильтрация – сводится к построению передаточной функции фильтра, при которой на
Оптимальная фильтрация – сводится к построению передаточной функции фильтра, при которой на
Радиоприемные устройства РЛС. Устройства адаптации
Основное усиление эхо - сигналов в приемнике
Радиоприемные устройства РЛС. Устройства адаптации
Основное усиление эхо - сигналов в приемнике
Радиоэлектронные средства наблюдения
Радиоприемные устройства РЛС. Устройства адаптации
Радиоэлектронные средства наблюдения
Радиоприемные устройства РЛС. Устройства адаптации
Радиоэлектронные средства наблюдения
Радиоприемные устройства РЛС. Устройства адаптации
Радиоэлектронные средства наблюдения
Радиоприемные устройства РЛС. Устройства адаптации
Радиоэлектронные средства наблюдения
Радиоприемные устройства РЛС. Устройства адаптации
Радиоэлектронные средства наблюдения
Радиоприемные устройства РЛС. Устройства адаптации
Радиоэлектронные средства наблюдения
Радиоприемные устройства РЛС. Устройства адаптации
Схема ВАРУ позволяет путем изменения
Радиоэлектронные средства наблюдения
Радиоприемные устройства РЛС. Устройства адаптации
Схема ВАРУ позволяет путем изменения
Радиоэлектронные средства наблюдения
Радиоприемные устройства РЛС. Устройства адаптации
На рисунке а. показано действие
Радиоэлектронные средства наблюдения
Радиоприемные устройства РЛС. Устройства адаптации
На рисунке а. показано действие
Радиоприемные устройства РЛС. Устройства адаптации
Система шумовой автоматической регулировки усиления (ШАРУ) обеспечивает
Радиоприемные устройства РЛС. Устройства адаптации
Система шумовой автоматической регулировки усиления (ШАРУ) обеспечивает
Теоретические основы радиолокации
Схема шумовой автоматической регулировки усиления (ШАРУ) предназначена для поддержания
Теоретические основы радиолокации
Схема шумовой автоматической регулировки усиления (ШАРУ) предназначена для поддержания
Радиоэлектронные средства наблюдения
Радиоприемные устройства РЛС. Устройства адаптации
Схема функциональная ячейки Д2УР038
МАРУ и
Радиоэлектронные средства наблюдения
Радиоприемные устройства РЛС. Устройства адаптации
Схема функциональная ячейки Д2УР038
МАРУ и
Радиоэлектронные средства наблюдения
Радиоприемные устройства РЛС. Устройства адаптации
Включение схемы МАРУ производится дистанционно
Радиоэлектронные средства наблюдения
Радиоприемные устройства РЛС. Устройства адаптации
Включение схемы МАРУ производится дистанционно
ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ
Методы защиты от пассивных маскирующих помех
1.
ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ
Методы защиты от пассивных маскирующих помех
1.
Теоретические основы радиолокации
Для того чтобы сравнить фазы отраженного и зондирующего сигналов,
Теоретические основы радиолокации
Для того чтобы сравнить фазы отраженного и зондирующего сигналов,
ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ
Различают несколько видов обеспечения когерентности колебаний.
Истинная
ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ
Различают несколько видов обеспечения когерентности колебаний.
Истинная
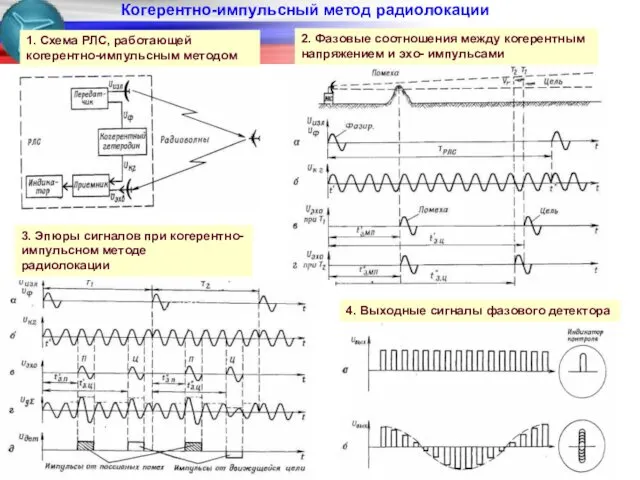
1. Схема РЛС, работающей когерентно-импульсным методом
Когерентно-импульсный метод радиолокации
2. Фазовые соотношения
1. Схема РЛС, работающей когерентно-импульсным методом
Когерентно-импульсный метод радиолокации
2. Фазовые соотношения
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Облака движущиеся под действием ветра,
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Облака движущиеся под действием ветра,
Метод череспериодной компенсации
Тот факт, что на выходе когерентно-импульсного устройства амплитуда видеоимпульсов
Метод череспериодной компенсации
Тот факт, что на выходе когерентно-импульсного устройства амплитуда видеоимпульсов
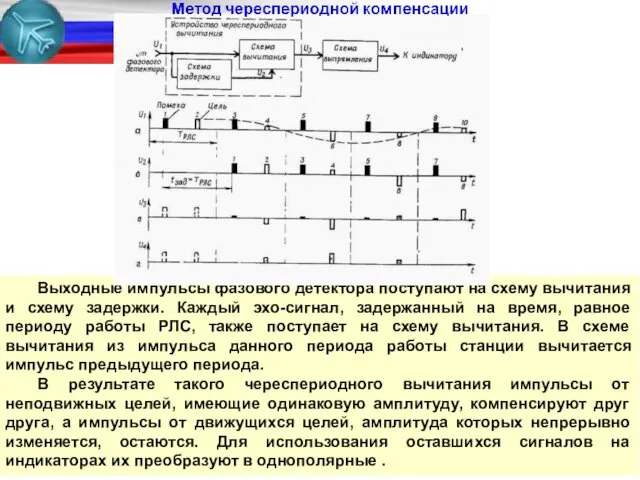
Выходные импульсы фазового детектора поступают на схему вычитания и схему задержки.
Выходные импульсы фазового детектора поступают на схему вычитания и схему задержки.
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Одним из основных недостатков когерентно-импульсного
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Одним из основных недостатков когерентно-импульсного

Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Система СДЦ с внутренней когерентностью
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Система СДЦ с внутренней когерентностью
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Система СДЦ с внутренней когерентностью
В
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Система СДЦ с внутренней когерентностью
В
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
В системах с внешней когерентностью
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
В системах с внешней когерентностью
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Такой череспериодный компенсатор представляет собой гребенчатый фильтр
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Такой череспериодный компенсатор представляет собой гребенчатый фильтр
 Анна Павлова (1881–1931 гг.)
Анна Павлова (1881–1931 гг.) Презентация Лесные жители
Презентация Лесные жители Первые паровозы
Первые паровозы Деформации и разрушения дорожных одежд
Деформации и разрушения дорожных одежд Презентация к родительскому собранию Конфликты в младшем школьном возрасте. Как их избежать
Презентация к родительскому собранию Конфликты в младшем школьном возрасте. Как их избежать Программа для работы с графами (grin). Дискретная математика
Программа для работы с графами (grin). Дискретная математика Служебные преступления главы 23 и 30 УК РФ
Служебные преступления главы 23 и 30 УК РФ Социальная психология образования. Магистерская программа
Социальная психология образования. Магистерская программа Квалиметрия в социальной работе
Квалиметрия в социальной работе Знакомство с плодами зерновых культур2
Знакомство с плодами зерновых культур2 Культура Бразилії
Культура Бразилії Религиозная организация христиан еры евангельской (пятидесятников). Ярославская церковь Победа Христа
Религиозная организация христиан еры евангельской (пятидесятников). Ярославская церковь Победа Христа Медициналық қызмет сапасын жақсарту бойынша денсаулық сақтау стратегиялық жоспары
Медициналық қызмет сапасын жақсарту бойынша денсаулық сақтау стратегиялық жоспары Мясо птицы
Мясо птицы 20231112_igra_8_klass_novoe_vremya
20231112_igra_8_klass_novoe_vremya электронный портфолио воспитателя ДОУ
электронный портфолио воспитателя ДОУ Атлантический океан. Основные характеристики Атлантического океана
Атлантический океан. Основные характеристики Атлантического океана Freelace holder installation guideline (1)
Freelace holder installation guideline (1) Принцип роботи ядерних електростанцій
Принцип роботи ядерних електростанцій Дыхательная гимнастика
Дыхательная гимнастика Организация проектной деятельности в школе
Организация проектной деятельности в школе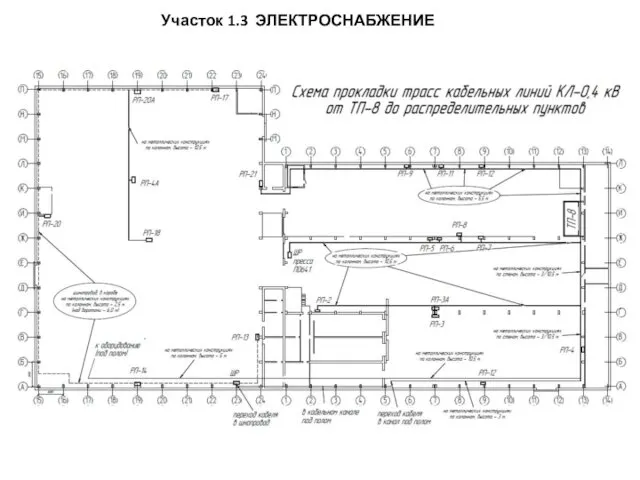 Схема расположения ПР и ШР на участке 1.3
Схема расположения ПР и ШР на участке 1.3 Организация контроля качества в гражданской авиации. Контроль качества авиаГСМ при приеме на склад
Организация контроля качества в гражданской авиации. Контроль качества авиаГСМ при приеме на склад Моніторинг і коментарі до нормативно-правових актів у сфері оподаткування, жовтень 2016
Моніторинг і коментарі до нормативно-правових актів у сфері оподаткування, жовтень 2016 Комитет по строительству, архитектуре и развитию города Барнаула
Комитет по строительству, архитектуре и развитию города Барнаула Экология 4А Баева
Экология 4А Баева Производство серной кислоты
Производство серной кислоты Подлежащее и сказуемое - главные члены предложения
Подлежащее и сказуемое - главные члены предложения