Понятие синтеза. Разработка систем автоматического управления технологическими процессами презентация
- Понятие синтеза. Разработка систем автоматического управления технологическими процессами

Содержание
- 2. 28.07.23 АТП Кафедра АСУП БГАТУ План Понятие синтеза Методика разработки алгоритма управления технологическими процессами Методика разработки
- 3. 28.07.23 АТП Кафедра АСУП БГАТУ Синтез — соединение (мысленное или реальное) различных элементов объекта в единое
- 4. 28.07.23 АТП Кафедра АСУП БГАТУ Синтез САУ включает три основных этапа: На первом этапе разрабатывается математическая
- 5. 28.07.23 АТП Кафедра АСУП БГАТУ Аналоговые (непрерывные системы) - все входные, выходные величины и параметры состояний
- 6. 28.07.23 АТП Кафедра АСУП БГАТУ Системы импульсного регулирования - входные и выходные величины являются дискретными во
- 7. 28.07.23 АТП Кафедра АСУП БГАТУ Дискретные (двоичные) системы - Все входные, выходные величины и параметры состояний
- 8. 28.07.23 АТП Кафедра АСУП БГАТУ Разработку схемы автоматизации начинают с разработки алгоритма управления, в процессе чего
- 9. 28.07.23 АТП Кафедра АСУП БГАТУ Раздача корма с помощью мобильного рельсового кормораздатчика
- 10. 28.07.23 АТП Кафедра АСУП БГАТУ Элементы САУ ПТЛ: Устройство управления — обеспечивает координацию действий всех устройств
- 11. 28.07.23 АТП Кафедра АСУП БГАТУ Для формализации алгоритма ТП применяют буквенные обозначения элементов САУ : a1,
- 12. 28.07.23 АТП Кафедра АСУП БГАТУ И обозначения операций над элементами САУ
- 13. 28.07.23 АТП Кафедра АСУП БГАТУ Схема расположения командных приборов и исполнительных устройств
- 14. 28.07.23 АТП Кафедра АСУП БГАТУ
- 15. 28.07.23 АТП Кафедра АСУП БГАТУ Частные таблицы включения ,
- 16. 28.07.23 АТП Кафедра АСУП БГАТУ Таблица покрытия
- 17. 28.07.23 АТП Кафедра АСУП БГАТУ Структурная схема САУ ТП Структурная схема САУ ТП после минимизации
- 18. Языки программирования ПЛК: язык последовательных функциональных схем – Sequential Function Chart – SFC; язык функциональных блоковых
- 19. 28.07.23 АТП Кафедра АСУП БГАТУ Схема подключения α-контроллера для реализации управления кормораздачей
- 20. Программирование на FBD: 28.07.23 АТП Кафедра АСУП БГАТУ
- 21. Программирование ПЛК 28.07.23 АТП Кафедра АСУП БГАТУ
- 22. 28.07.23 АТП Кафедра АСУП БГАТУ
- 23. Программирование на РКЛ: 28.07.23 АТП Кафедра АСУП БГАТУ
- 25. Скачать презентацию

28.07.23
АТП Кафедра АСУП БГАТУ
План
Понятие синтеза
Методика разработки алгоритма управления технологическими процессами
Методика разработки
28.07.23
АТП Кафедра АСУП БГАТУ
План
Понятие синтеза
Методика разработки алгоритма управления технологическими процессами
Методика разработки
28.07.23
АТП Кафедра АСУП БГАТУ
Синтез — соединение (мысленное или реальное) различных элементов
28.07.23
АТП Кафедра АСУП БГАТУ
Синтез — соединение (мысленное или реальное) различных элементов
28.07.23
АТП Кафедра АСУП БГАТУ
Синтез САУ включает три основных этапа:
На первом этапе
28.07.23
АТП Кафедра АСУП БГАТУ
Синтез САУ включает три основных этапа:
На первом этапе
28.07.23
АТП Кафедра АСУП БГАТУ
Аналоговые (непрерывные системы) - все входные, выходные величины
28.07.23
АТП Кафедра АСУП БГАТУ
Аналоговые (непрерывные системы) - все входные, выходные величины

28.07.23
АТП Кафедра АСУП БГАТУ
Системы импульсного регулирования - входные и выходные величины
28.07.23
АТП Кафедра АСУП БГАТУ
Системы импульсного регулирования - входные и выходные величины
28.07.23
АТП Кафедра АСУП БГАТУ
Дискретные (двоичные) системы - Все входные, выходные величины
28.07.23
АТП Кафедра АСУП БГАТУ
Дискретные (двоичные) системы - Все входные, выходные величины
28.07.23
АТП Кафедра АСУП БГАТУ
Разработку схемы автоматизации начинают с разработки алгоритма управления,
28.07.23
АТП Кафедра АСУП БГАТУ
Разработку схемы автоматизации начинают с разработки алгоритма управления,

28.07.23
АТП Кафедра АСУП БГАТУ
Раздача корма с помощью мобильного рельсового кормораздатчика
28.07.23
АТП Кафедра АСУП БГАТУ
Раздача корма с помощью мобильного рельсового кормораздатчика

28.07.23
АТП Кафедра АСУП БГАТУ
Элементы САУ ПТЛ:
Устройство управления — обеспечивает координацию действий
28.07.23
АТП Кафедра АСУП БГАТУ
Элементы САУ ПТЛ:
Устройство управления — обеспечивает координацию действий
28.07.23
АТП Кафедра АСУП БГАТУ
Для формализации алгоритма ТП применяют буквенные обозначения элементов
28.07.23
АТП Кафедра АСУП БГАТУ
Для формализации алгоритма ТП применяют буквенные обозначения элементов
28.07.23
АТП Кафедра АСУП БГАТУ
И обозначения операций над элементами САУ
28.07.23
АТП Кафедра АСУП БГАТУ
И обозначения операций над элементами САУ

28.07.23
АТП Кафедра АСУП БГАТУ
Схема расположения командных приборов и исполнительных устройств
28.07.23
АТП Кафедра АСУП БГАТУ
Схема расположения командных приборов и исполнительных устройств
28.07.23
АТП Кафедра АСУП БГАТУ
28.07.23
АТП Кафедра АСУП БГАТУ
28.07.23
АТП Кафедра АСУП БГАТУ
Частные таблицы включения
,
28.07.23
АТП Кафедра АСУП БГАТУ
Частные таблицы включения
,
28.07.23
АТП Кафедра АСУП БГАТУ
Таблица покрытия
28.07.23
АТП Кафедра АСУП БГАТУ
Таблица покрытия
28.07.23
АТП Кафедра АСУП БГАТУ
Структурная схема САУ ТП
Структурная схема САУ ТП
28.07.23
АТП Кафедра АСУП БГАТУ
Структурная схема САУ ТП
Структурная схема САУ ТП

Языки программирования ПЛК:
язык последовательных функциональных схем – Sequential Function Chart –
Языки программирования ПЛК:
язык последовательных функциональных схем – Sequential Function Chart –
28.07.23
АТП Кафедра АСУП БГАТУ
Схема подключения α-контроллера для реализации управления кормораздачей
28.07.23
АТП Кафедра АСУП БГАТУ
Схема подключения α-контроллера для реализации управления кормораздачей
Программирование на FBD:
28.07.23
АТП Кафедра АСУП БГАТУ
Программирование на FBD:
28.07.23
АТП Кафедра АСУП БГАТУ

Программирование ПЛК
28.07.23
АТП Кафедра АСУП БГАТУ
Программирование ПЛК
28.07.23
АТП Кафедра АСУП БГАТУ
28.07.23
АТП Кафедра АСУП БГАТУ
28.07.23
АТП Кафедра АСУП БГАТУ

Программирование на РКЛ:
28.07.23
АТП Кафедра АСУП БГАТУ
Программирование на РКЛ:
28.07.23
АТП Кафедра АСУП БГАТУ
 Уроки качества,1-2 (Кубанское - отличное, Молочные реки)
Уроки качества,1-2 (Кубанское - отличное, Молочные реки) Как животные видят мир
Как животные видят мир 20230626_summa_arifmeticheskoy_progressii
20230626_summa_arifmeticheskoy_progressii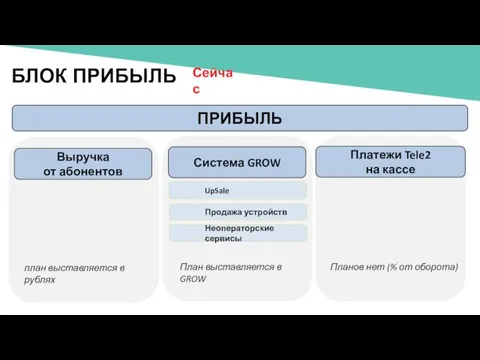 Новая система KPI's партнеров Tele 2
Новая система KPI's партнеров Tele 2 23февраля-День защитника Отечества
23февраля-День защитника Отечества Творить и думать каждый рад в Союзе Современных Ребят
Творить и думать каждый рад в Союзе Современных Ребят Управление поставками проекта
Управление поставками проекта Презентация без названия (wecompress.com)
Презентация без названия (wecompress.com) Марія Заньковецька
Марія Заньковецька Электронный каталог – важнейшая часть цифрового контента Национальной библиотеки имени С. Г. Чавайна
Электронный каталог – важнейшая часть цифрового контента Национальной библиотеки имени С. Г. Чавайна Аминокислоты. Белки
Аминокислоты. Белки Презентация реализация ФГОС ДОУ
Презентация реализация ФГОС ДОУ Тұқым қуалайтын аурулардың патогенезі. (Гемафилия)
Тұқым қуалайтын аурулардың патогенезі. (Гемафилия) Экспериментальный этап исследования. Эмпирические методы исследования
Экспериментальный этап исследования. Эмпирические методы исследования Аварии на химически опасных объектах и химическое заражение окружающей среды
Аварии на химически опасных объектах и химическое заражение окружающей среды Общие сведения о приспособлениях
Общие сведения о приспособлениях Прокатные производства, прессование волочения
Прокатные производства, прессование волочения Пирамида. Задания для устного счета. Упражнение 11
Пирамида. Задания для устного счета. Упражнение 11 Методика обучения рассуждению
Методика обучения рассуждению Управление МКД. Цели и задачи
Управление МКД. Цели и задачи Корпоративное венчурные фонды, как новый субъект отношений в сфере интеллектуальной собственности
Корпоративное венчурные фонды, как новый субъект отношений в сфере интеллектуальной собственности Дети и музей
Дети и музей Правильная осанка
Правильная осанка Понятие функции в Excel
Понятие функции в Excel Дошкольный возраст. Возрастная характеристика развития ребенка
Дошкольный возраст. Возрастная характеристика развития ребенка Синхронные машины. Магнитные поля и векторные диаграммы. Характеристики и режимы работы
Синхронные машины. Магнитные поля и векторные диаграммы. Характеристики и режимы работы Мир моих увлечений
Мир моих увлечений Презентация Режим дня
Презентация Режим дня