- Повышение точности высотного размера поковок

Содержание
- 2. Состояние исследований и научные школы Проектирование КГШП: Ланской Е. Н. Числовое программное управление процессами и машинами
- 3. Цели и задачи работы Разработка научно обоснованной методики проектирования механизма оперативной регулировки закрытой высоты с системой
- 4. Результаты исследования Р.Н.Пруцкова, В.И.Балаганского, А.Т. Крука и др: отклонение высоты поковки здесь: ∆FД=f(∆L, ∆T )–отклонение силы
- 5. Закон изменения температуры нагрева заготовки в индукторе: где: ∆Tа–амплитуда колебания температуры нагрева заготовок; τ –текущее время
- 6. Типовой процесс штамповки шестерни второй передачи вторичного вала коробки передач автомобиля ЗИЛ на КГШП 25МН Заготовка
- 7. Факторы, влияющие на отклонение высотного размера поковок Гипотеза интегрального учета факторов тех. процесса ГОШ на КГШП
- 8. 1 – зажимная скоба; 2 - эксцентриковый палец с зубьями в центральной нижней части; 3 -
- 9. Схема с ручным управлением механизма регулировки закрытой высоты КГШП Регулировка за счет поворота детали 2 и
- 10. Ползун с механизмом регулировки закрытой высоты КГШП
- 11. Привод механизма регулировки закрытой высоты
- 12. Схема системы программного управления механизмом регулировки КГШП с применением сервопривода (ПЧ)
- 13. Процесс штамповки шестерни второй передачи вторичного вала коробки передач автомобиля ЗИЛ на КГШП 25МН с случае
- 14. Моделирование работы КГШП 25МН. Параметры, фиксируемые при моделировании
- 15. Моделирование работы КГШП 25МН без оперативной подрегулировки закрытой высоты (случай взаимного влияния факторов массы и температуры
- 16. Моделирование работы КГШП 25МН с оперативной подрегулировкой закрытой высоты (случай взаимного влияния факторов массы и температуры
- 17. Результаты моделирования Вывод: оперативная регулировка осуществима, отклонения высотного размера поковок могут стабилизироваться оперативной регулировкой закрытой высоты
- 18. Зависимость сил предварительного и окончательного переходов штамповки от параметров процесса ГОШ на КГШП25МН
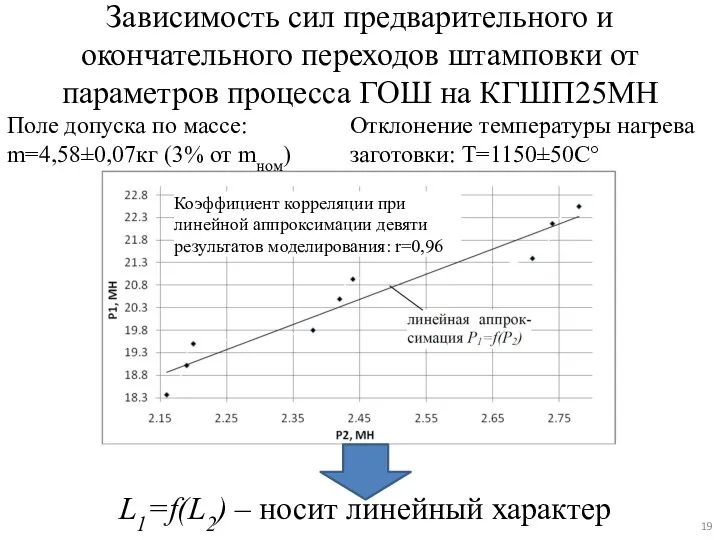
- 19. Зависимость сил предварительного и окончательного переходов штамповки от параметров процесса ГОШ на КГШП25МН Поле допуска по
- 20. Адаптивная модель работы механизма оперативной регулировки по параметрам процесса ГОШ на КГШП Определение имитационной модели изменения
- 21. Блок-схема имитационной модели системы управления механизмом оперативной регулировки закрытой высоты КГШП
- 22. Схема работы адаптивной системы управления механизмом регулировки закрытой высоты КГШП 25МН (по программе Диана)
- 23. Интерфейс программы Диана
- 24. Визуализация результатов работы имитационной модели изменения закрытой высоты КГШП Величина несмыкания штампов, мм Номер цикла штамповки
- 25. Кинематическая схема, приборы и датчики экспериментальной установки
- 26. Кинематическая схема механизма экспериментального стенда
- 27. Экспериментальная установка 1 2 3 5 4 1-синхронный двигатель механизма оперативной подрегулировки закрытой высоты КШП 630кН
- 28. Стабильность и время оперативной регулировки закрытой высоты Стабильное вращение вала двигателя 1375 об/мин Работа при пиковых
- 29. Моделирование работы стенда в ПА-9 Результаты моделирования согласуются с результатами эксперимента 1-частота вращения двигателя, об/с 2-обороты
- 30. Точность позиционирования механизма оперативной регулировки закрытой высоты Определение угла поворота шестерни : интегрирование диаграммы скорости вращения
- 33. Скачать презентацию
Состояние исследований и научные школы
Проектирование КГШП: Ланской Е. Н.
Числовое программное управление
Состояние исследований и научные школы
Проектирование КГШП: Ланской Е. Н.
Числовое программное управление
Цели и задачи работы
Разработка научно обоснованной методики проектирования механизма оперативной регулировки
Цели и задачи работы
Разработка научно обоснованной методики проектирования механизма оперативной регулировки
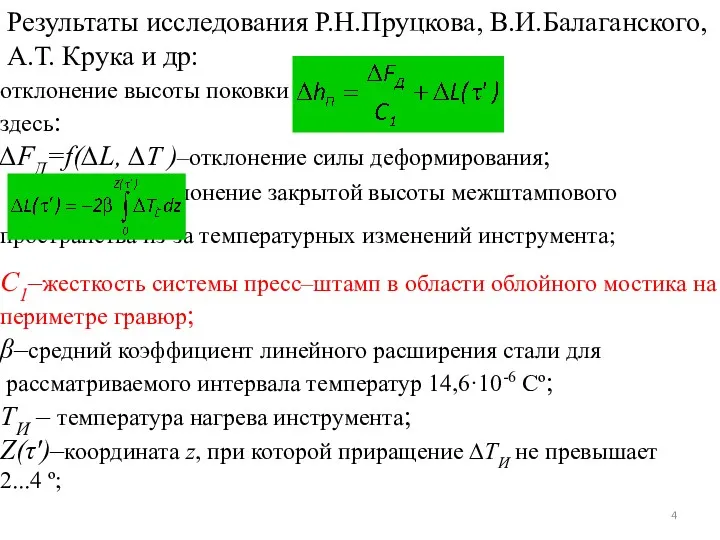
Результаты исследования Р.Н.Пруцкова, В.И.Балаганского, А.Т. Крука и др:
отклонение высоты поковки
здесь:
∆FД=f(∆L, ∆T
Результаты исследования Р.Н.Пруцкова, В.И.Балаганского, А.Т. Крука и др:
отклонение высоты поковки
здесь:
∆FД=f(∆L, ∆T
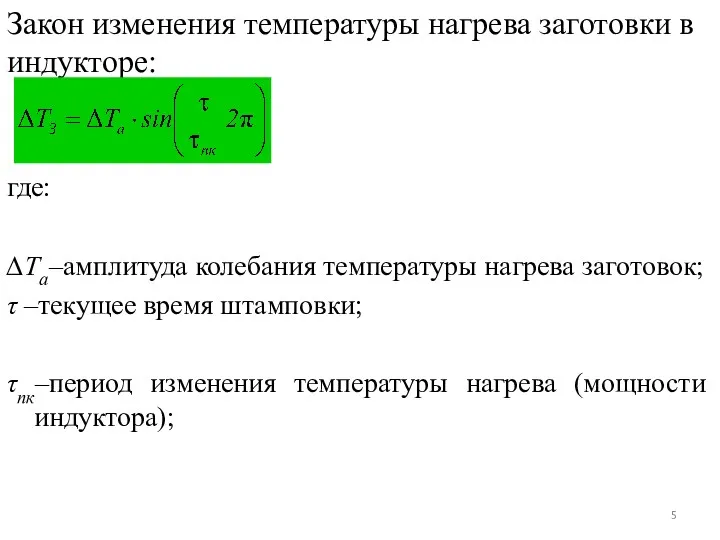
Закон изменения температуры нагрева заготовки в индукторе:
где:
∆Tа–амплитуда колебания температуры нагрева заготовок;
τ
Закон изменения температуры нагрева заготовки в индукторе:
где:
∆Tа–амплитуда колебания температуры нагрева заготовок;
τ
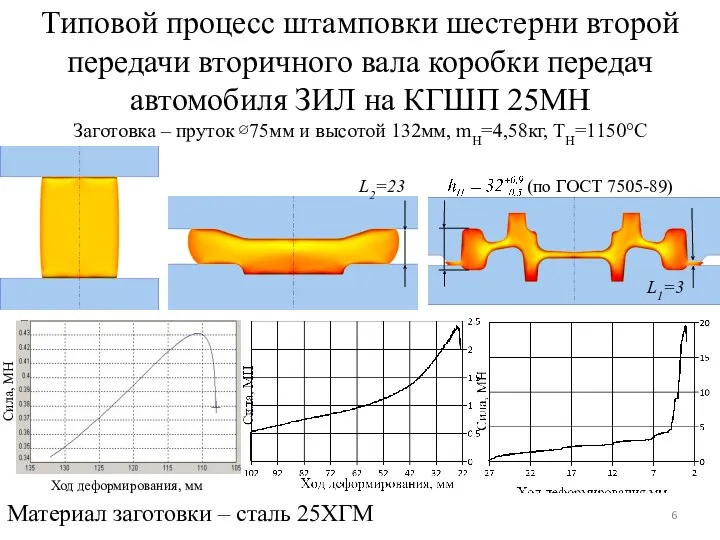
Типовой процесс штамповки шестерни второй передачи вторичного вала коробки передач автомобиля
Типовой процесс штамповки шестерни второй передачи вторичного вала коробки передач автомобиля
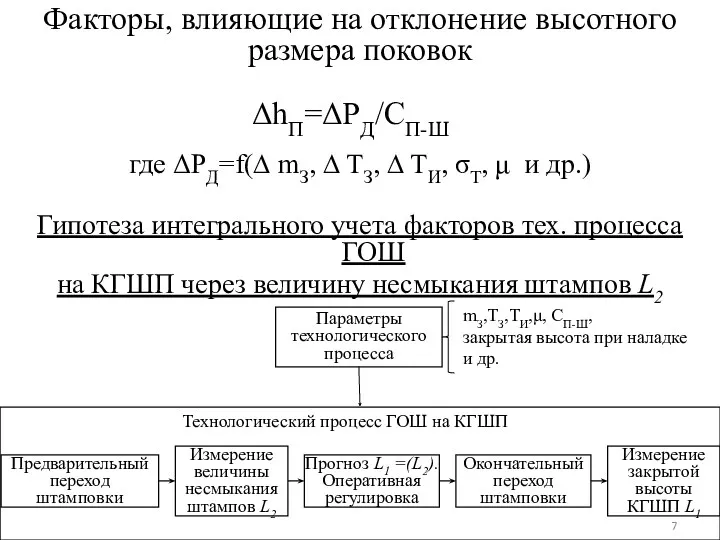
Факторы, влияющие на отклонение высотного размера поковок
Гипотеза интегрального учета факторов тех.
Факторы, влияющие на отклонение высотного размера поковок
Гипотеза интегрального учета факторов тех.
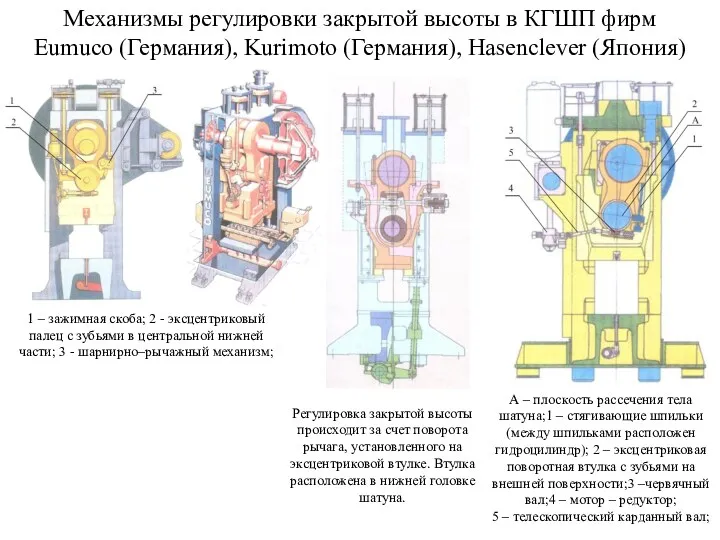
1 – зажимная скоба; 2 - эксцентриковый палец с зубьями в
1 – зажимная скоба; 2 - эксцентриковый палец с зубьями в
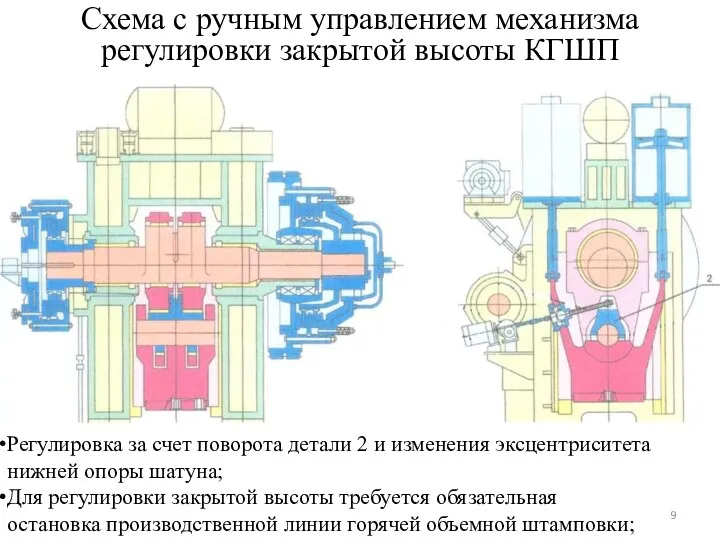
Схема с ручным управлением механизма регулировки закрытой высоты КГШП
Регулировка за счет
Схема с ручным управлением механизма регулировки закрытой высоты КГШП
Регулировка за счет
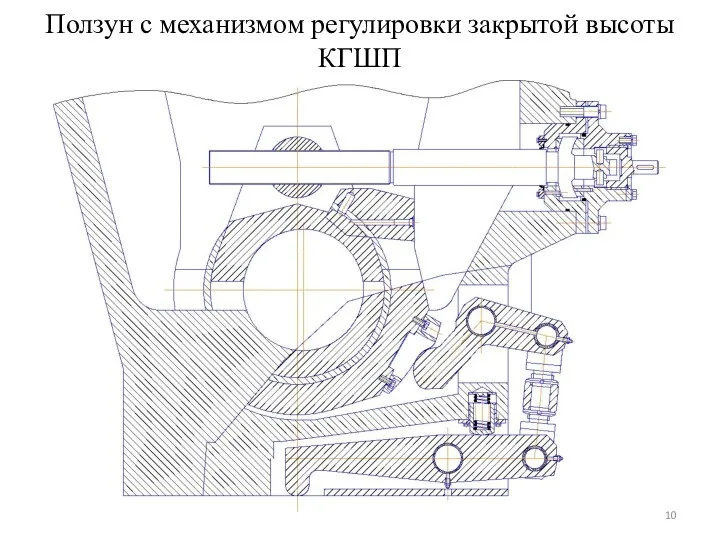
Ползун с механизмом регулировки закрытой высоты КГШП
Ползун с механизмом регулировки закрытой высоты КГШП
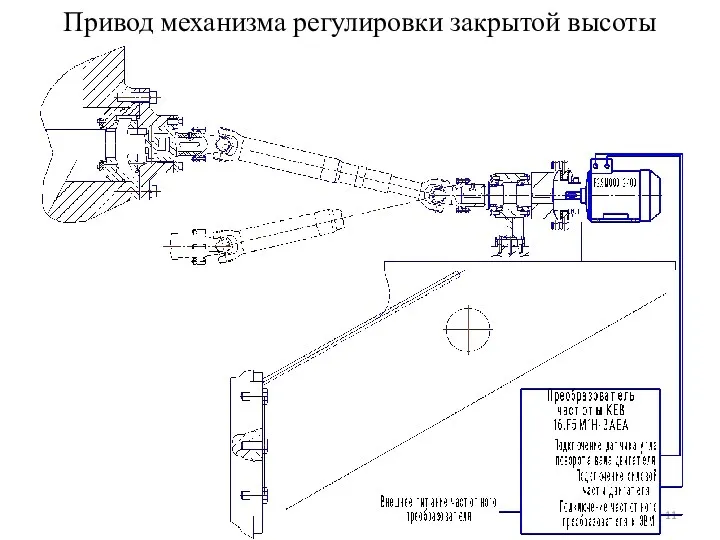
Привод механизма регулировки закрытой высоты
Привод механизма регулировки закрытой высоты
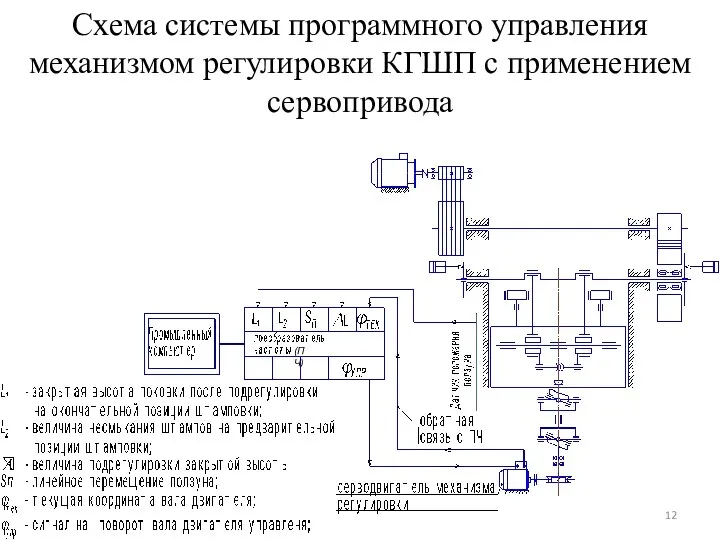
Схема системы программного управления механизмом регулировки КГШП с применением сервопривода
(ПЧ)
Схема системы программного управления механизмом регулировки КГШП с применением сервопривода
(ПЧ)
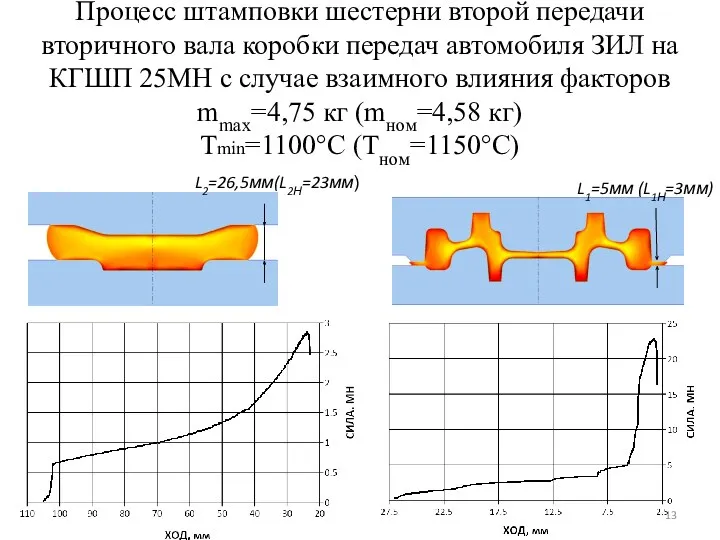
Процесс штамповки шестерни второй передачи вторичного вала коробки передач автомобиля ЗИЛ
Процесс штамповки шестерни второй передачи вторичного вала коробки передач автомобиля ЗИЛ
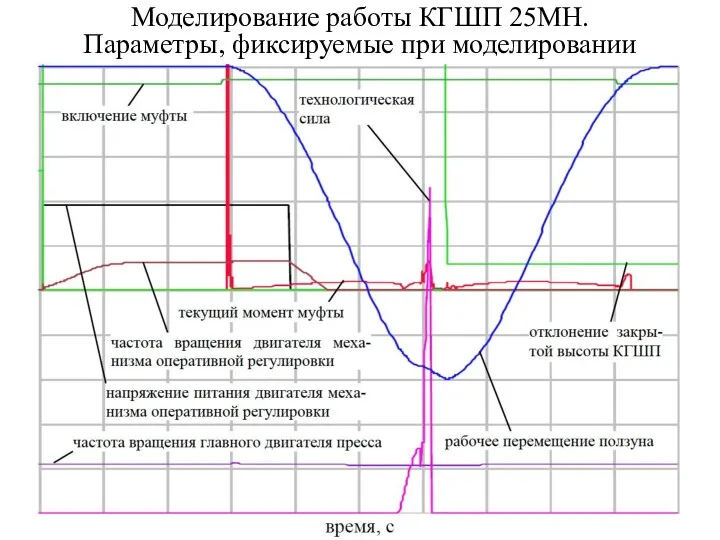
Моделирование работы КГШП 25МН.
Параметры, фиксируемые при моделировании
Моделирование работы КГШП 25МН.
Параметры, фиксируемые при моделировании
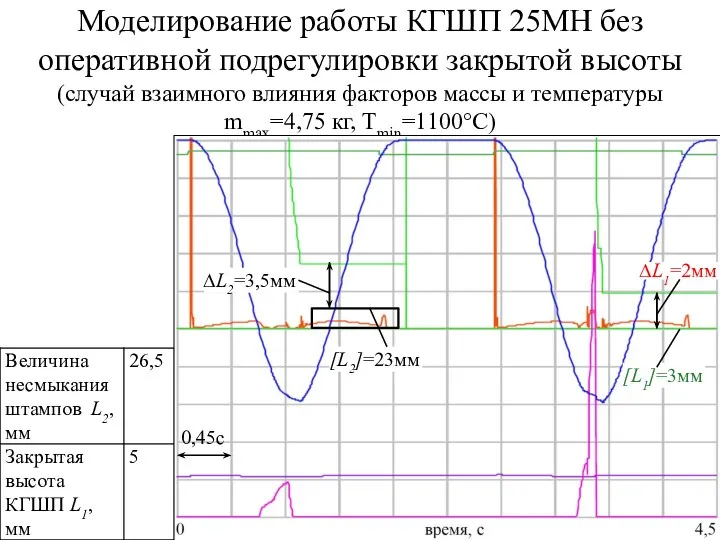
Моделирование работы КГШП 25МН без оперативной подрегулировки закрытой высоты
(случай взаимного влияния
Моделирование работы КГШП 25МН без оперативной подрегулировки закрытой высоты (случай взаимного влияния
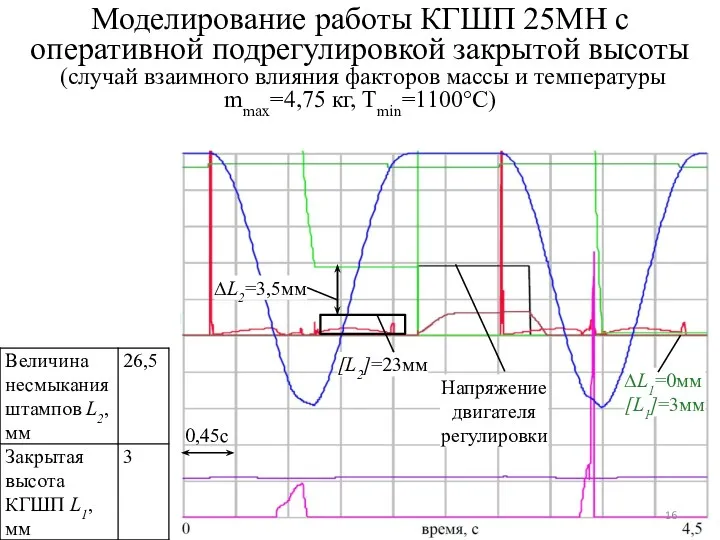
Моделирование работы КГШП 25МН с оперативной подрегулировкой закрытой высоты
(случай взаимного
Моделирование работы КГШП 25МН с оперативной подрегулировкой закрытой высоты (случай взаимного
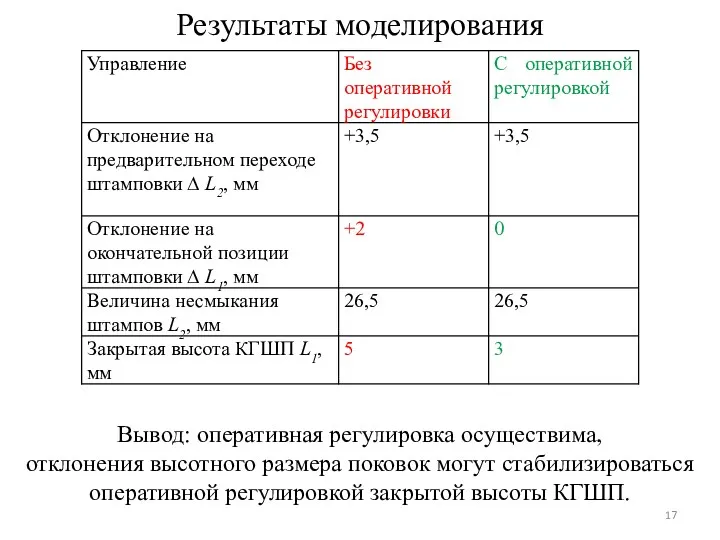
Результаты моделирования
Вывод: оперативная регулировка осуществима,
отклонения высотного размера поковок могут стабилизироваться оперативной
Результаты моделирования
Вывод: оперативная регулировка осуществима,
отклонения высотного размера поковок могут стабилизироваться оперативной
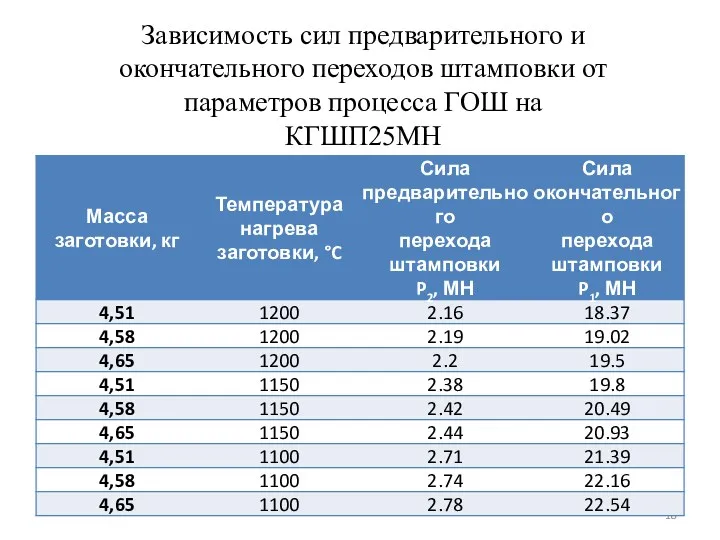
Зависимость сил предварительного и окончательного переходов штамповки от параметров процесса ГОШ
Зависимость сил предварительного и окончательного переходов штамповки от параметров процесса ГОШ
Зависимость сил предварительного и окончательного переходов штамповки от параметров процесса ГОШ
Зависимость сил предварительного и окончательного переходов штамповки от параметров процесса ГОШ
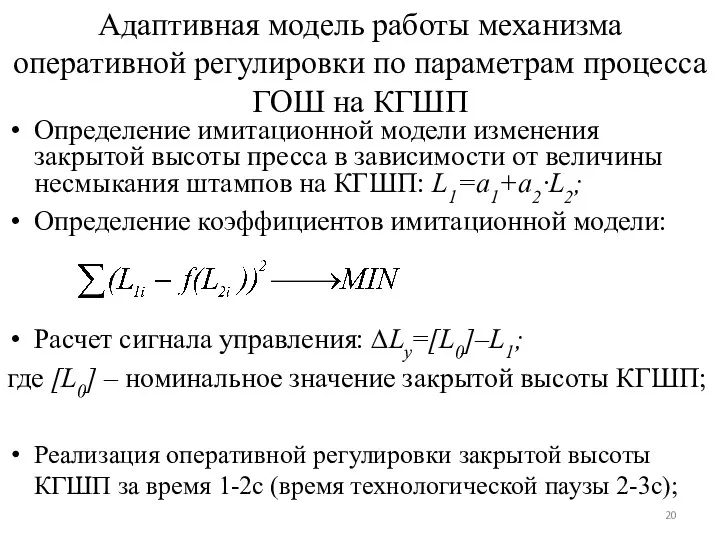
Адаптивная модель работы механизма оперативной регулировки по параметрам процесса ГОШ на
Адаптивная модель работы механизма оперативной регулировки по параметрам процесса ГОШ на

Блок-схема имитационной модели системы управления механизмом оперативной регулировки закрытой высоты КГШП
Блок-схема имитационной модели системы управления механизмом оперативной регулировки закрытой высоты КГШП
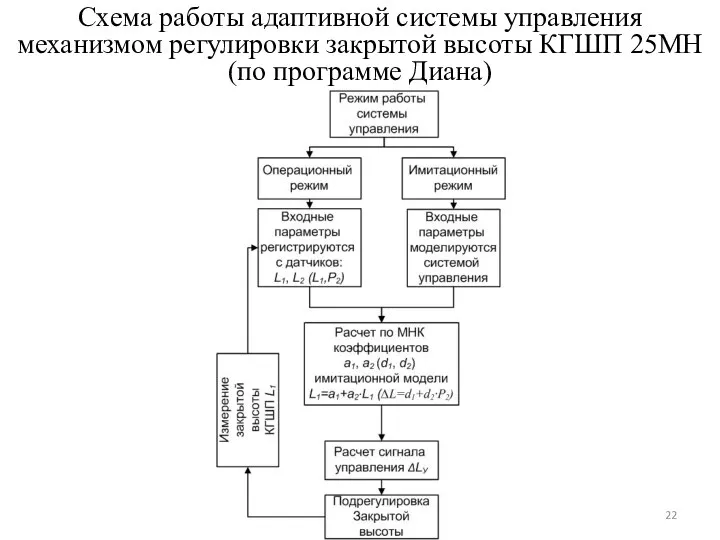
Схема работы адаптивной системы управления механизмом регулировки закрытой высоты КГШП 25МН
Схема работы адаптивной системы управления механизмом регулировки закрытой высоты КГШП 25МН
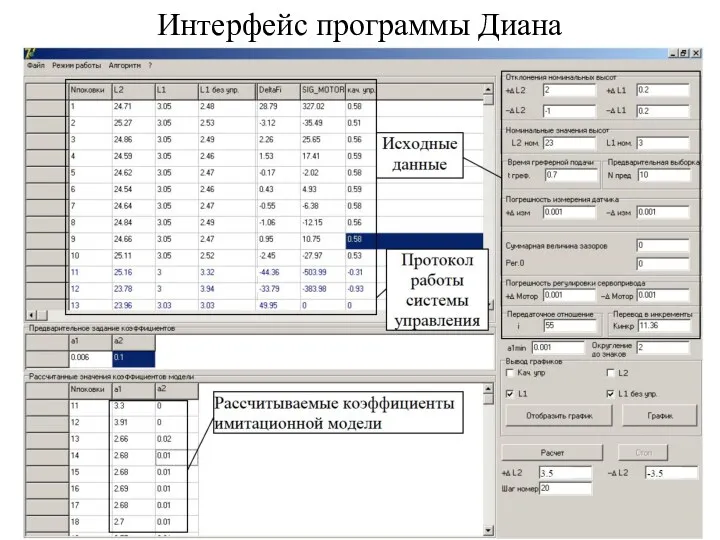
Интерфейс программы Диана
Интерфейс программы Диана
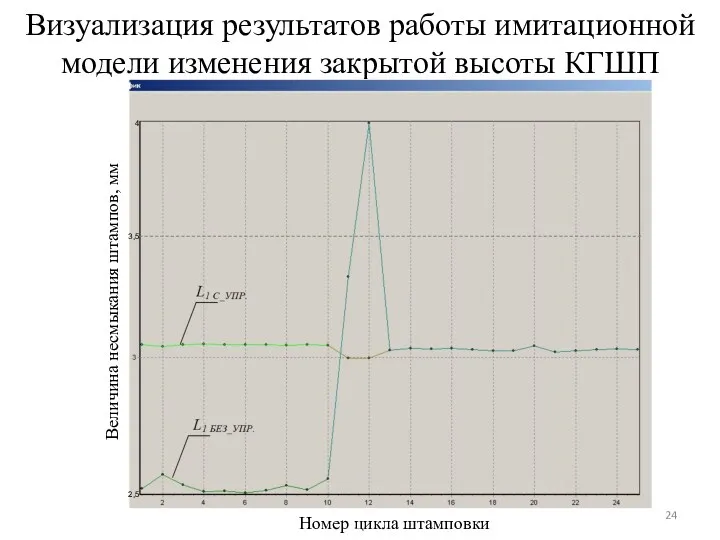
Визуализация результатов работы имитационной модели изменения закрытой высоты КГШП
Величина несмыкания штампов,
Визуализация результатов работы имитационной модели изменения закрытой высоты КГШП
Величина несмыкания штампов,
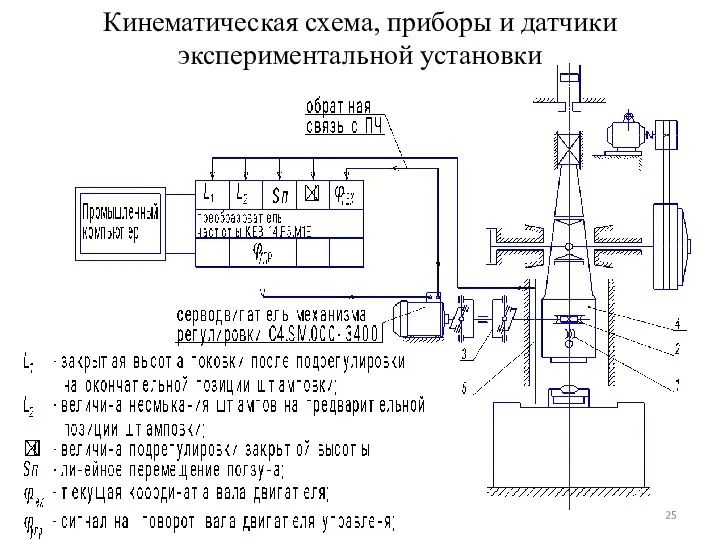
Кинематическая схема, приборы и датчики экспериментальной установки
Кинематическая схема, приборы и датчики экспериментальной установки
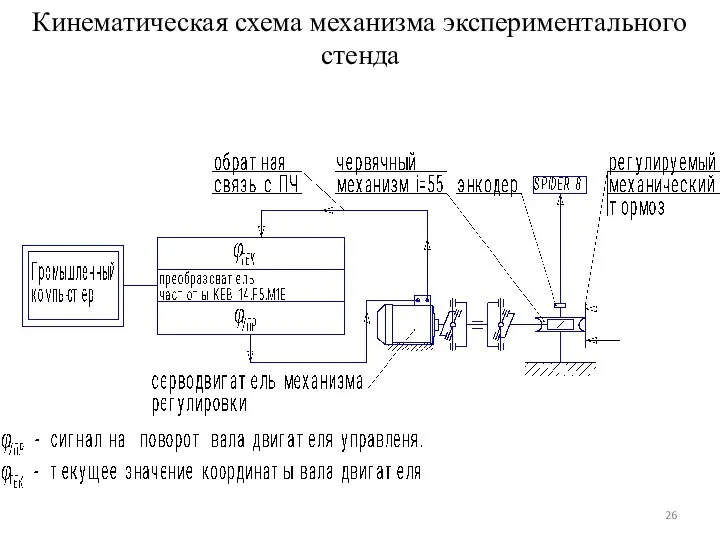
Кинематическая схема механизма экспериментального стенда
Кинематическая схема механизма экспериментального стенда

Экспериментальная установка
1
2
3
5
4
1-синхронный двигатель механизма
оперативной подрегулировки
закрытой высоты КШП 630кН
(Mн=5Нм, Pн=1,57кВт)
2-червячный механизм оперативной
Экспериментальная установка
1
2
3
5
4
1-синхронный двигатель механизма
оперативной подрегулировки
закрытой высоты КШП 630кН
(Mн=5Нм, Pн=1,57кВт)
2-червячный механизм оперативной
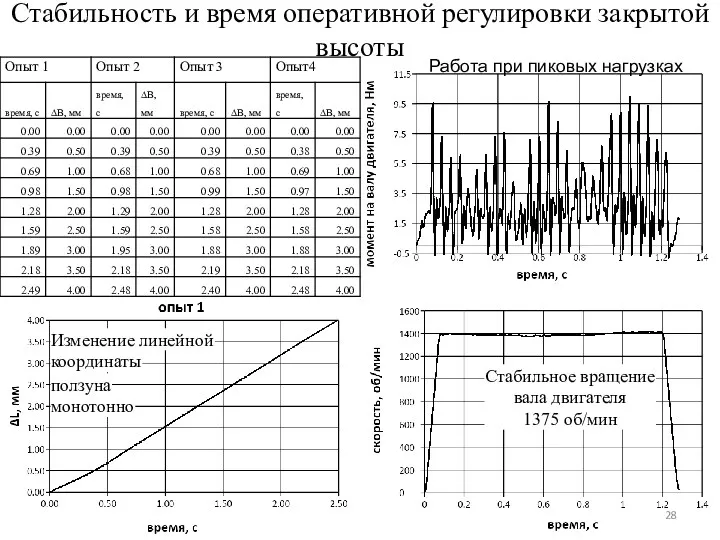
Стабильность и время оперативной регулировки закрытой высоты
Стабильное вращение
вала двигателя
1375 об/мин
Работа при
Стабильность и время оперативной регулировки закрытой высоты
Стабильное вращение
вала двигателя
1375 об/мин
Работа при
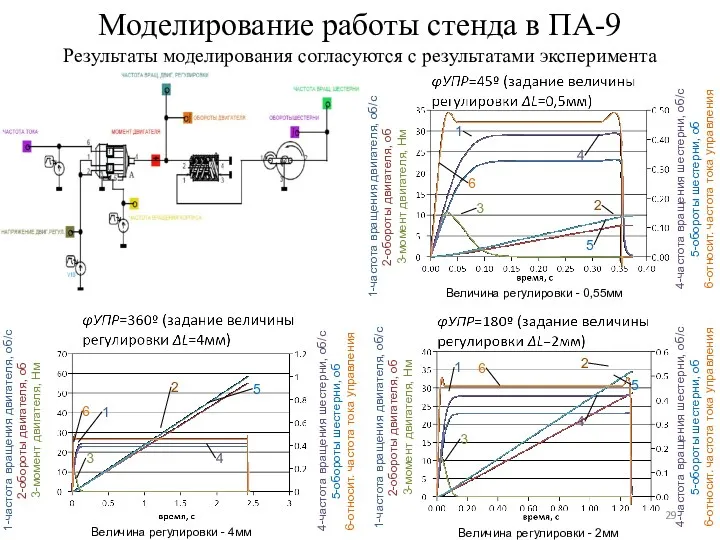
Моделирование работы стенда в ПА-9
Результаты моделирования согласуются с результатами эксперимента
1-частота вращения
Моделирование работы стенда в ПА-9
Результаты моделирования согласуются с результатами эксперимента
1-частота вращения
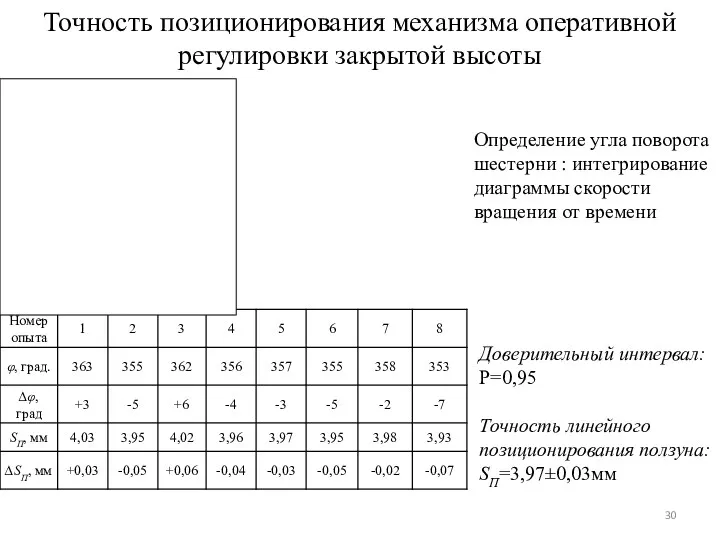
Точность позиционирования механизма оперативной регулировки закрытой высоты
Определение угла поворота шестерни :
Точность позиционирования механизма оперативной регулировки закрытой высоты
Определение угла поворота шестерни :

 Биостимуляторы. Гиполипидемические средства
Биостимуляторы. Гиполипидемические средства Презентация Загадки - обманки
Презентация Загадки - обманки Стрельба в играх
Стрельба в играх Презетация к мастер-классу Правила дорожные верные, надежные!
Презетация к мастер-классу Правила дорожные верные, надежные! Умножение и деление. Задачи
Умножение и деление. Задачи Методика работы с пословицами и поговорками на уроках литературного чтения
Методика работы с пословицами и поговорками на уроках литературного чтения Зима в музыке, поэзии и живописи
Зима в музыке, поэзии и живописи Значение периодического закона
Значение периодического закона Выбор расположения дополнительного водосброса в ходе комплексной реконструкции Майнского гидроузла
Выбор расположения дополнительного водосброса в ходе комплексной реконструкции Майнского гидроузла Аквариумные рыбки и уход за ними
Аквариумные рыбки и уход за ними Электроэнергетика. Виды электроэнергетики
Электроэнергетика. Виды электроэнергетики Вода в атмосфере
Вода в атмосфере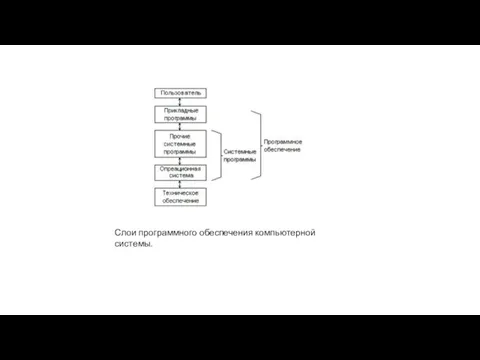 Процессы и их поддержка в операционной системе
Процессы и их поддержка в операционной системе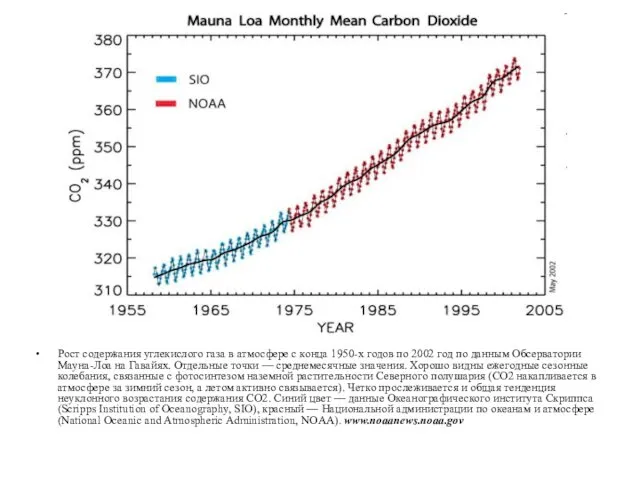 Глобальное потепление
Глобальное потепление Статистика в биологии
Статистика в биологии Мастер-класс Интерактивные технологии обучения на уроках географии как средства формирования коммуникативной компетентности школьников
Мастер-класс Интерактивные технологии обучения на уроках географии как средства формирования коммуникативной компетентности школьников Государственная территория России
Государственная территория России Школа молодого педагога (1 встреча)
Школа молодого педагога (1 встреча) Презентация для классного часа по теме Герои России
Презентация для классного часа по теме Герои России Литературная викторина
Литературная викторина Наш выбор - здоровый образ жизни
Наш выбор - здоровый образ жизни Профессиональный стандарт педагога как основа оценки педагогической деятельности и профессионального развития педагога
Профессиональный стандарт педагога как основа оценки педагогической деятельности и профессионального развития педагога Библиотека молодым: поиск позитивных и действенных форм работы
Библиотека молодым: поиск позитивных и действенных форм работы Работа над дикцией и артикуляцией: игровые приемы
Работа над дикцией и артикуляцией: игровые приемы Инженерный вуз XXI века
Инженерный вуз XXI века Дружба и вражда. Аспекты темы
Дружба и вражда. Аспекты темы История нашего города. Санкт-Петербург 1703 год
История нашего города. Санкт-Петербург 1703 год Monitorizarea calitatii. Energiei electrice
Monitorizarea calitatii. Energiei electrice