- Практические вопросы построения МП систем

Содержание
- 2. Рассматриваемые вопросы Порты ввода/вывода микроконтроллера Режим альтернативных функций портов ввода/вывода Подключение датчиков 2-х проводная схема Делитель
- 3. Порт ввода/вывода Порт ввода/вывода – периферийное устройство процессора, предназна-ченное для соединения его с внешними устройствами с
- 4. Виды портов ввода/вывода По способу обмена данными порты бывают последовательными и парал-лельными. По виду синхронизации порты
- 5. Последовательный и параллельный порты Последовательный порт имеет одноразрядный формат и передаёт (принимает) информацию по принципу «один
- 6. Синхронный и асинхронный порты Синхронными называют порты, передача и приём информации с помощью которых осуществляется с
- 7. Специализированные и универсальные порты Специализированные порты предназначены для реализации определённых интерфейсов обмена данными (SPI, USB, RS-232/422/285
- 8. Способы обмена информацией через порт Существуют следующие режимы обмена информацией через порт ввода/вывода: Программно-управляемый обмен; Обмен
- 9. Краткое описание способов обмена данными При программно-управляемом обмене (program-driven I/O) все операции ввода-вывода выполняются в соответствии
- 10. Регистры портов ввода/вывода микроконтроллеров AVR В микроконтроллерах AVR каждому порту ввода/вывода соответствуют три 8-разрядных регистра ввода/вывода:
- 11. Схема порта ввода/вывода микроконтроллера AVR Схема линии порта ввода/вывода из описания микроконтроллера AVR
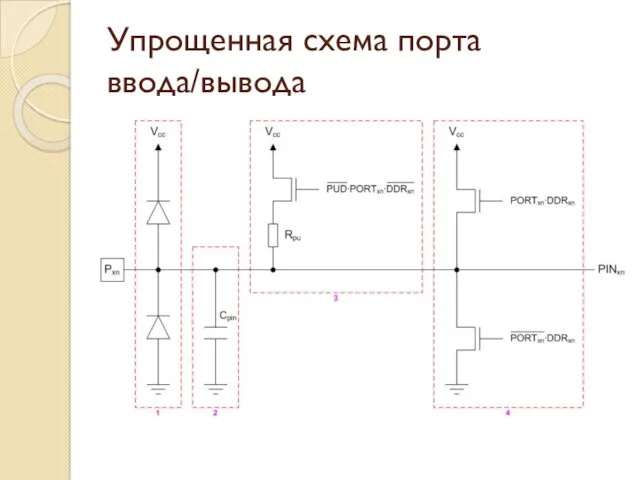
- 12. Упрощенная схема порта ввода/вывода
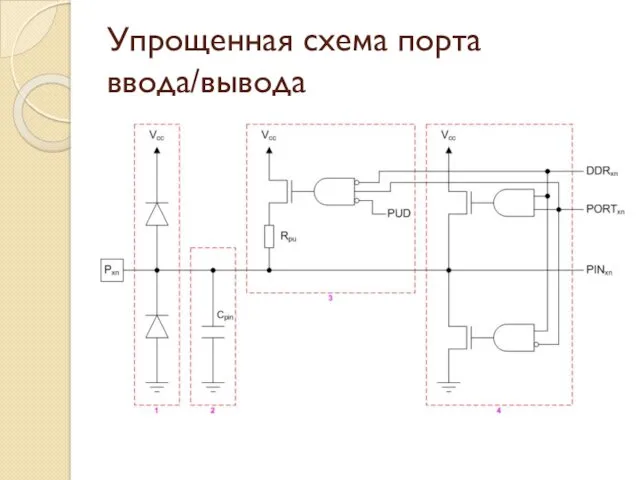
- 13. Упрощенная схема порта ввода/вывода
- 14. Состав порта (не полный) На упрощенной схеме отображены следующие части порта: 1 – защитные диоды; 2
- 15. Защита порта ввода/вывода и его паразитная емкость
- 16. Назначение защитных диодов и влияние паразитной емкости Защитные диоды нужны для защиты ввода микро-контроллера от кратковременных
- 17. Режимы работы порта ввода/вывода Существует несколько режимов работы порта ввода/вывода: Высокоимпедансный вход (режим Hi-Z); Вход с
- 18. Таблица режимов линии порта ввода/вывода Х означает, что значение сигнала на соответствующей линии не имеет значения.
- 19. Каскад управления подтяжкой линии порта к Uпит
- 20. Высокоимпедансный вход Режим Hi-Z включен по умолчанию. Все ключи разомкнуты, а сопротивление порта очень велико. При
- 21. Вход с подтяжкой (режим Pull Up) При DDRxn=0, PORTxn=1 и PUD=0 замыкается ключ подтяжки и к
- 22. Режим Pull Up: линия порта ввода/вывода «висит в воздухе»
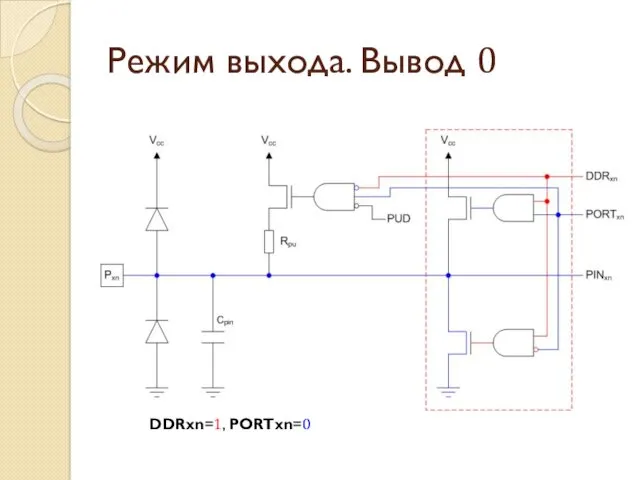
- 23. Режим выхода. Вывод 0 DDRxn=1, PORTxn=0
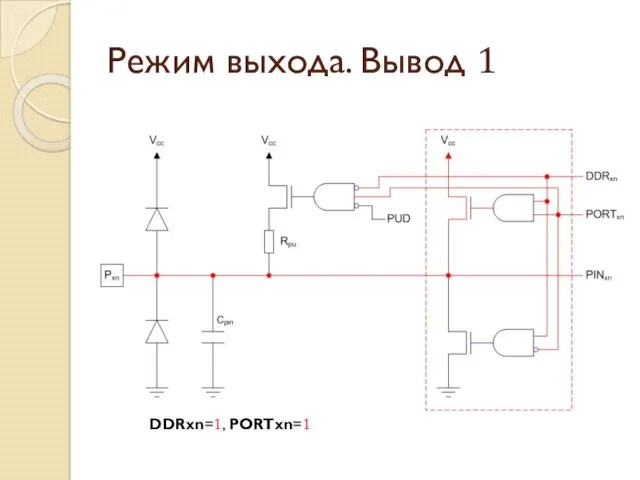
- 24. Режим выхода. Вывод 1 DDRxn=1, PORTxn=1
- 25. Режим альтернативных функций порта ввода/вывода В AVR микроконтроллерах каждая линия порта ввода/вывода общего назначения может быть
- 26. Схема линии порта МК AVR с альтернативной функцией
- 27. Упрощенная схема линии порта МК AVR с альтернативной функцией Защитные диоды, паразитная емкость, линия сигнала PUD
- 28. Работа порта в режиме альтернативной функции Альтернативная функция порта в/в включается, если происходит инициализация периферий-ного устройства,
- 29. Активные и пассивные датчики и их питание Датчики бывают активные (генераторные) и пассивные (параметрические). В первых
- 30. Варианты сопряжения датчика и микроконтроллера Рассмотрим варианты сопряжения датчика с микроконтроллером. В первом варианте датчик выдаёт
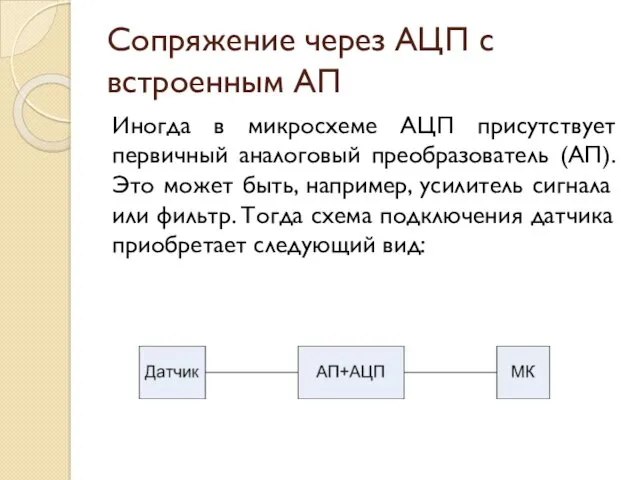
- 31. Сопряжение через АЦП с встроенным АП Иногда в микросхеме АЦП присутствует первичный аналоговый преобразователь (АП). Это
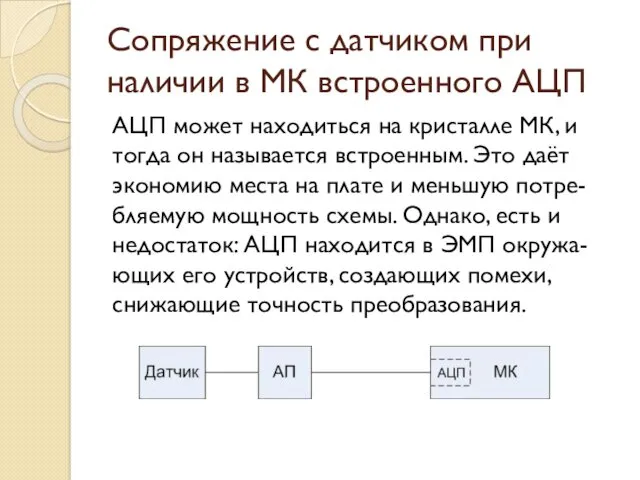
- 32. Сопряжение с датчиком при наличии в МК встроенного АЦП АЦП может находиться на кристалле МК, и
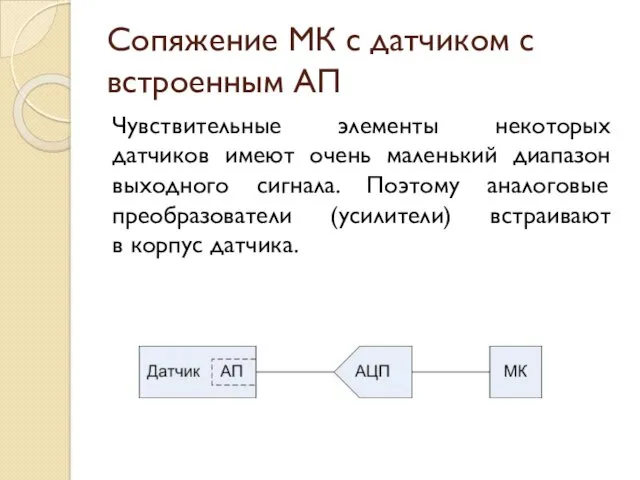
- 33. Сопяжение МК с датчиком с встроенным АП Чувствительные элементы некоторых датчиков имеют очень маленький диапазон выходного
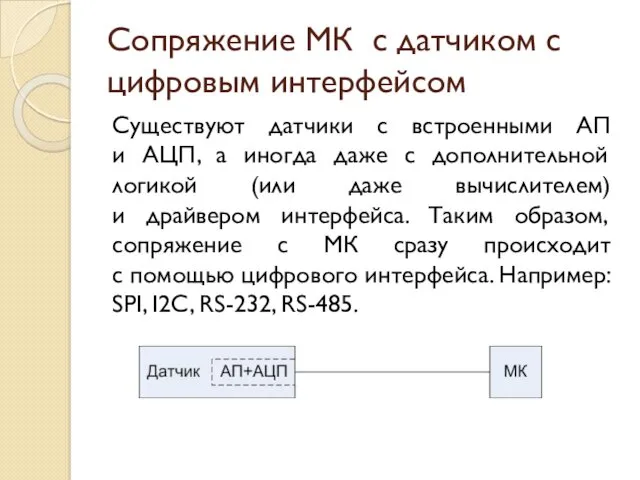
- 34. Сопряжение МК с датчиком с цифровым интерфейсом Существуют датчики с встроенными АП и АЦП, а иногда
- 35. Подключение датчика с помощью делителя напряжения
- 36. Подключение потенциометриче-ского датчика
- 37. Выходной сигнал и погрешность потенциометрической схемы
- 38. Мостовая схема Мостовая измерительная схема содержит два плеча — измерительное, в которое включен параметрический датчик R1,
- 39. Простая мостовая схема
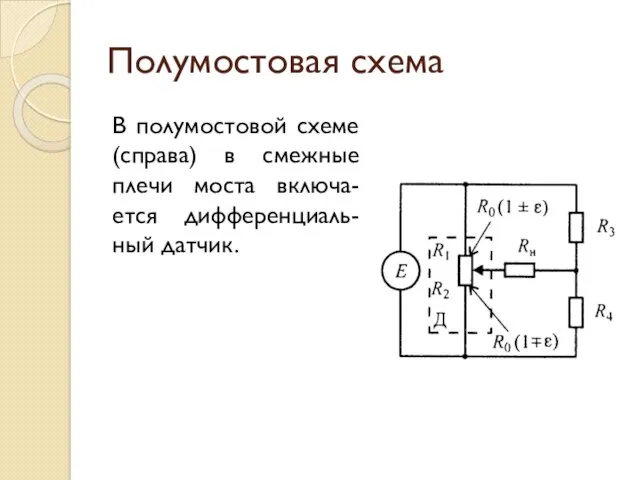
- 40. Полумостовая схема В полумостовой схеме (справа) в смежные плечи моста включа-ется дифференциаль-ный датчик.
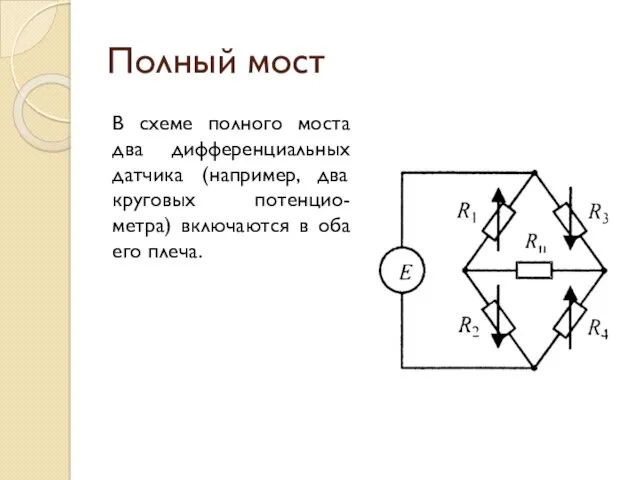
- 41. Полный мост В схеме полного моста два дифференциальных датчика (например, два круговых потенцио-метра) включаются в оба
- 42. Формула для расчета мостовых схем
- 43. Условие балансировки моста
- 44. Подключение датчиков к мостовым схемам Во многих случаях датчики террито-риально удалены от измерительной схемы, а сигналы
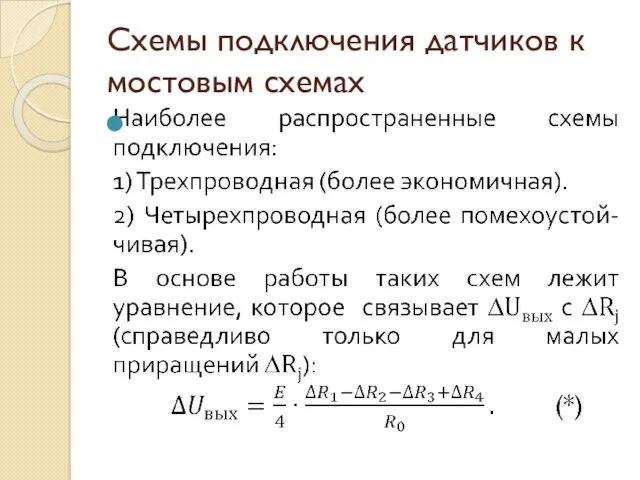
- 45. Схемы подключения датчиков к мостовым схемах
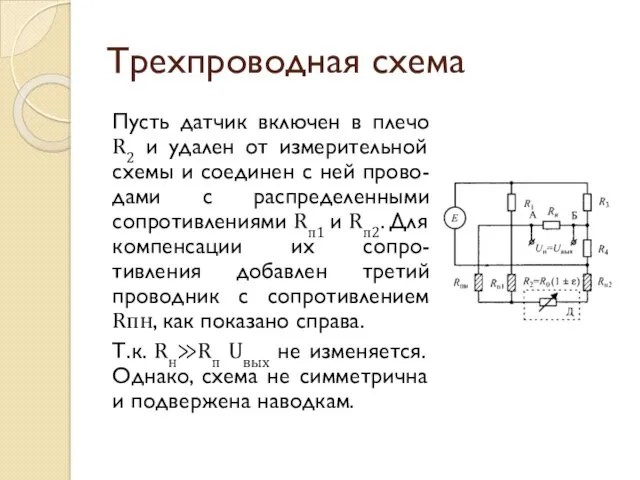
- 46. Трехпроводная схема Пусть датчик включен в плечо R2 и удален от измерительной схемы и соединен с
- 47. Четырехпроводная схема Четырехпроводная схема более помехоустойчива. В ней используются две витые пары (справа), которые подавляют синфазные
- 48. Аналоговая токовая петля Она чаще всего применяется в промышленной автоматизации при сопряжении промышлен-ных контроллеров с датчиками
- 49. Диапазоны сигнала аналоговой токовой петли Существует несколько вариантов диапа-зонов сигнала аналоговой токовой петли: «0–20 мА», «4–20
- 50. Схема аналоговой токовой петли
- 51. Реле Реле (relay) – устройство, принимающее конечное число значений выходной величины под воздействием некоторого внешнего физического
- 53. Скачать презентацию
Рассматриваемые вопросы
Порты ввода/вывода микроконтроллера
Режим альтернативных функций портов ввода/вывода
Подключение датчиков
2-х проводная схема
Делитель
Рассматриваемые вопросы
Порты ввода/вывода микроконтроллера
Режим альтернативных функций портов ввода/вывода
Подключение датчиков
2-х проводная схема
Делитель
Порт ввода/вывода
Порт ввода/вывода – периферийное устройство процессора, предназна-ченное для соединения его
Порт ввода/вывода
Порт ввода/вывода – периферийное устройство процессора, предназна-ченное для соединения его
Виды портов ввода/вывода
По способу обмена данными порты бывают последовательными и парал-лельными.
По
Виды портов ввода/вывода
По способу обмена данными порты бывают последовательными и парал-лельными.
По
Последовательный и параллельный порты
Последовательный порт имеет одноразрядный формат и передаёт (принимает)
Последовательный и параллельный порты
Последовательный порт имеет одноразрядный формат и передаёт (принимает)
Синхронный и асинхронный порты
Синхронными называют порты, передача и приём информации с
Синхронный и асинхронный порты
Синхронными называют порты, передача и приём информации с
Специализированные и универсальные порты
Специализированные порты предназначены для реализации определённых интерфейсов обмена
Специализированные и универсальные порты
Специализированные порты предназначены для реализации определённых интерфейсов обмена
Способы обмена информацией через порт
Существуют следующие режимы обмена информацией через порт
Способы обмена информацией через порт
Существуют следующие режимы обмена информацией через порт
Краткое описание способов обмена данными
При программно-управляемом обмене (program-driven I/O) все операции
Краткое описание способов обмена данными
При программно-управляемом обмене (program-driven I/O) все операции
Регистры портов ввода/вывода микроконтроллеров AVR
В микроконтроллерах AVR каждому порту ввода/вывода соответствуют
Регистры портов ввода/вывода микроконтроллеров AVR
В микроконтроллерах AVR каждому порту ввода/вывода соответствуют

Схема порта ввода/вывода микроконтроллера AVR
Схема линии порта ввода/вывода из описания микроконтроллера
Схема порта ввода/вывода микроконтроллера AVR
Схема линии порта ввода/вывода из описания микроконтроллера
Упрощенная схема порта ввода/вывода
Упрощенная схема порта ввода/вывода
Упрощенная схема порта ввода/вывода
Упрощенная схема порта ввода/вывода
Состав порта (не полный)
На упрощенной схеме отображены следующие части порта:
1 –
Состав порта (не полный)
На упрощенной схеме отображены следующие части порта:
1 –

Защита порта ввода/вывода и его паразитная емкость
Защита порта ввода/вывода и его паразитная емкость
Назначение защитных диодов и влияние паразитной емкости
Защитные диоды нужны для защиты
Назначение защитных диодов и влияние паразитной емкости
Защитные диоды нужны для защиты
Режимы работы порта ввода/вывода
Существует несколько режимов работы порта ввода/вывода:
Высокоимпедансный вход (режим
Режимы работы порта ввода/вывода
Существует несколько режимов работы порта ввода/вывода:
Высокоимпедансный вход (режим

Таблица режимов линии порта ввода/вывода
Х означает, что значение сигнала на соответствующей
Таблица режимов линии порта ввода/вывода
Х означает, что значение сигнала на соответствующей
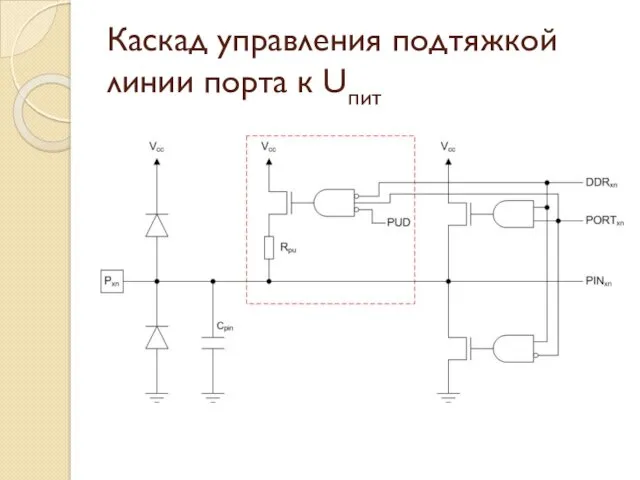
Каскад управления подтяжкой линии порта к Uпит
Каскад управления подтяжкой линии порта к Uпит
Высокоимпедансный вход
Режим Hi-Z включен по умолчанию. Все ключи разомкнуты, а сопротивление
Высокоимпедансный вход
Режим Hi-Z включен по умолчанию. Все ключи разомкнуты, а сопротивление
Вход с подтяжкой (режим Pull Up)
При DDRxn=0, PORTxn=1 и PUD=0 замыкается
Вход с подтяжкой (режим Pull Up)
При DDRxn=0, PORTxn=1 и PUD=0 замыкается
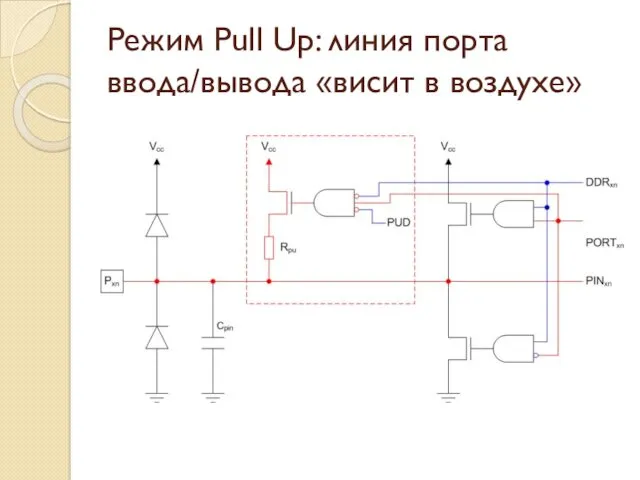
Режим Pull Up: линия порта ввода/вывода «висит в воздухе»
Режим Pull Up: линия порта ввода/вывода «висит в воздухе»
Режим выхода. Вывод 0
DDRxn=1, PORTxn=0
Режим выхода. Вывод 0
DDRxn=1, PORTxn=0
Режим выхода. Вывод 1
DDRxn=1, PORTxn=1
Режим выхода. Вывод 1
DDRxn=1, PORTxn=1
Режим альтернативных функций порта ввода/вывода
В AVR микроконтроллерах каждая линия порта ввода/вывода
Режим альтернативных функций порта ввода/вывода
В AVR микроконтроллерах каждая линия порта ввода/вывода

Схема линии порта МК AVR с альтернативной функцией
Схема линии порта МК AVR с альтернативной функцией

Упрощенная схема линии порта МК AVR с альтернативной функцией
Защитные диоды, паразитная
Упрощенная схема линии порта МК AVR с альтернативной функцией
Защитные диоды, паразитная
Работа порта в режиме альтернативной функции
Альтернативная функция порта в/в включается, если
Работа порта в режиме альтернативной функции
Альтернативная функция порта в/в включается, если
Активные и пассивные датчики и их питание
Датчики бывают активные (генераторные) и
Активные и пассивные датчики и их питание
Датчики бывают активные (генераторные) и
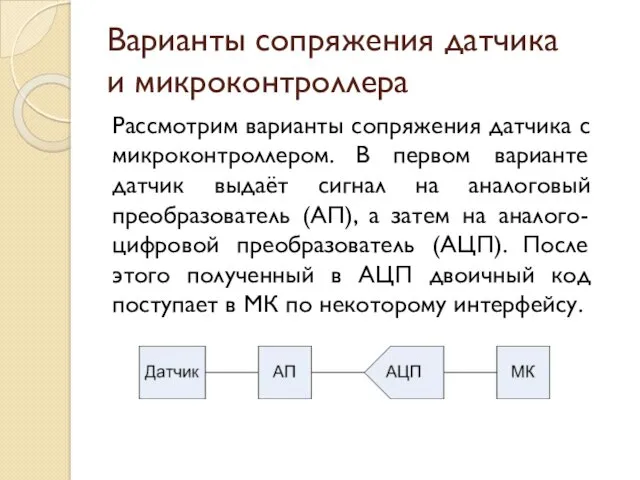
Варианты сопряжения датчика
и микроконтроллера
Рассмотрим варианты сопряжения датчика с микроконтроллером. В
Варианты сопряжения датчика
и микроконтроллера
Рассмотрим варианты сопряжения датчика с микроконтроллером. В
Сопряжение через АЦП с встроенным АП
Иногда в микросхеме АЦП присутствует первичный
Сопряжение через АЦП с встроенным АП
Иногда в микросхеме АЦП присутствует первичный
Сопряжение с датчиком при наличии в МК встроенного АЦП
АЦП может находиться
Сопряжение с датчиком при наличии в МК встроенного АЦП
АЦП может находиться
Сопяжение МК с датчиком с встроенным АП
Чувствительные элементы некоторых датчиков имеют
Сопяжение МК с датчиком с встроенным АП
Чувствительные элементы некоторых датчиков имеют
Сопряжение МК с датчиком с цифровым интерфейсом
Существуют датчики с встроенными АП
Сопряжение МК с датчиком с цифровым интерфейсом
Существуют датчики с встроенными АП
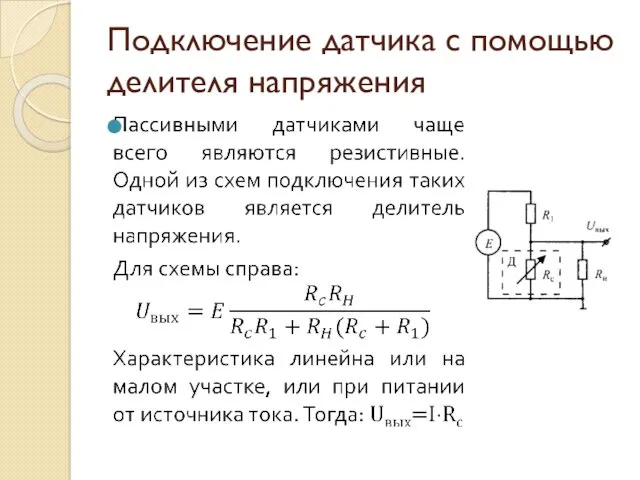
Подключение датчика с помощью делителя напряжения
Подключение датчика с помощью делителя напряжения
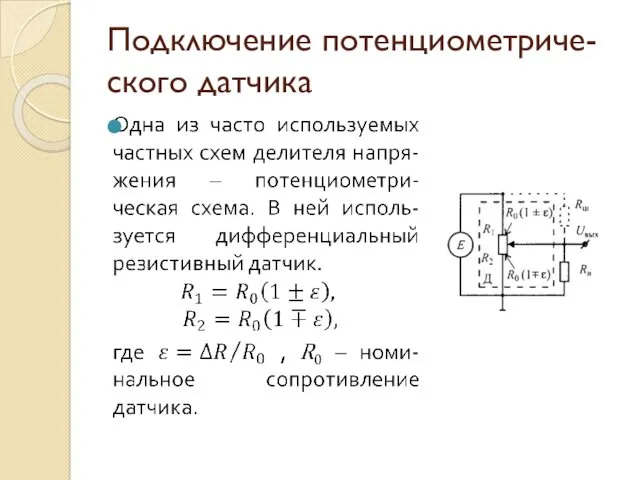
Подключение потенциометриче-ского датчика
Подключение потенциометриче-ского датчика
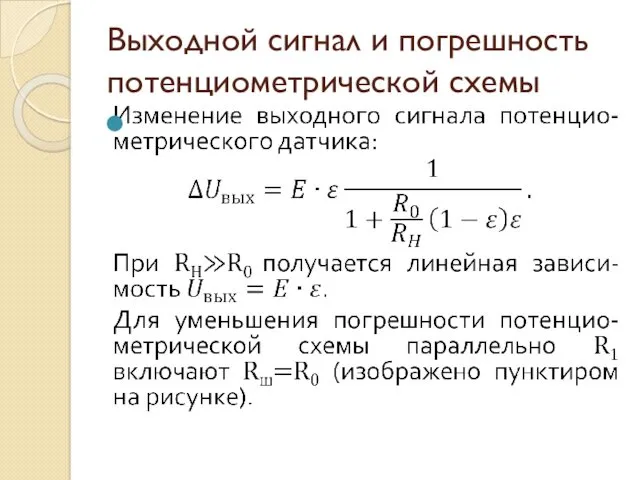
Выходной сигнал и погрешность потенциометрической схемы
Выходной сигнал и погрешность потенциометрической схемы
Мостовая схема
Мостовая измерительная схема содержит два плеча — измерительное, в которое
Мостовая схема
Мостовая измерительная схема содержит два плеча — измерительное, в которое
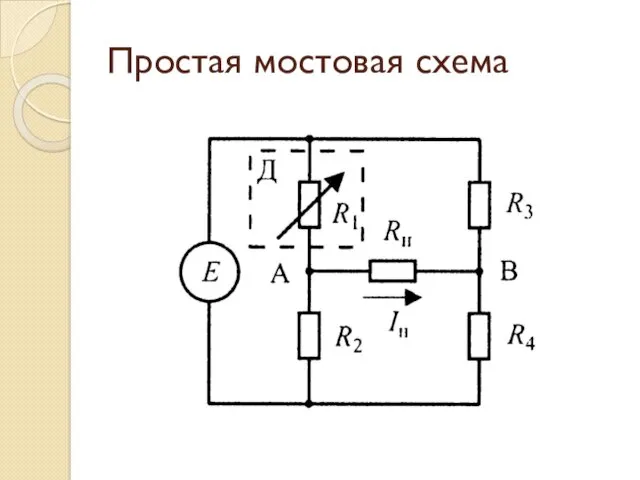
Простая мостовая схема
Простая мостовая схема
Полумостовая схема
В полумостовой схеме (справа) в смежные плечи моста включа-ется дифференциаль-ный
Полумостовая схема
В полумостовой схеме (справа) в смежные плечи моста включа-ется дифференциаль-ный
Полный мост
В схеме полного моста два дифференциальных датчика (например, два круговых
Полный мост
В схеме полного моста два дифференциальных датчика (например, два круговых
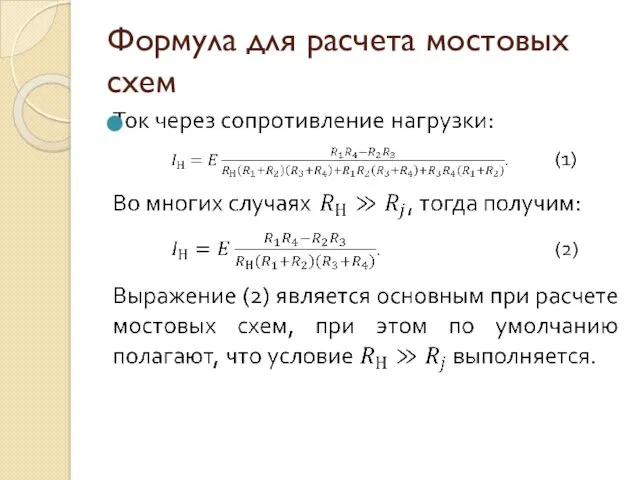
Формула для расчета мостовых схем
Формула для расчета мостовых схем
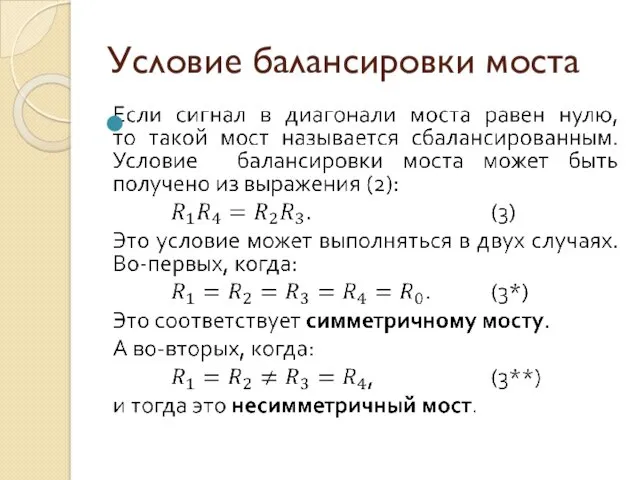
Условие балансировки моста
Условие балансировки моста
Подключение датчиков к мостовым схемам
Во многих случаях датчики террито-риально удалены от
Подключение датчиков к мостовым схемам
Во многих случаях датчики террито-риально удалены от
Схемы подключения датчиков к мостовым схемах
Схемы подключения датчиков к мостовым схемах
Трехпроводная схема
Пусть датчик включен в плечо R2 и удален от измерительной
Трехпроводная схема
Пусть датчик включен в плечо R2 и удален от измерительной
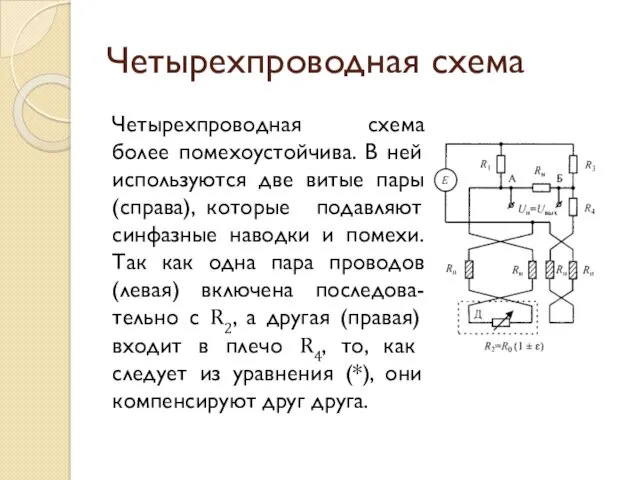
Четырехпроводная схема
Четырехпроводная схема более помехоустойчива. В ней используются две витые пары
Четырехпроводная схема
Четырехпроводная схема более помехоустойчива. В ней используются две витые пары
Аналоговая токовая петля
Она чаще всего применяется в промышленной автоматизации при сопряжении
Аналоговая токовая петля
Она чаще всего применяется в промышленной автоматизации при сопряжении
Диапазоны сигнала аналоговой токовой петли
Существует несколько вариантов диапа-зонов сигнала аналоговой токовой
Диапазоны сигнала аналоговой токовой петли
Существует несколько вариантов диапа-зонов сигнала аналоговой токовой
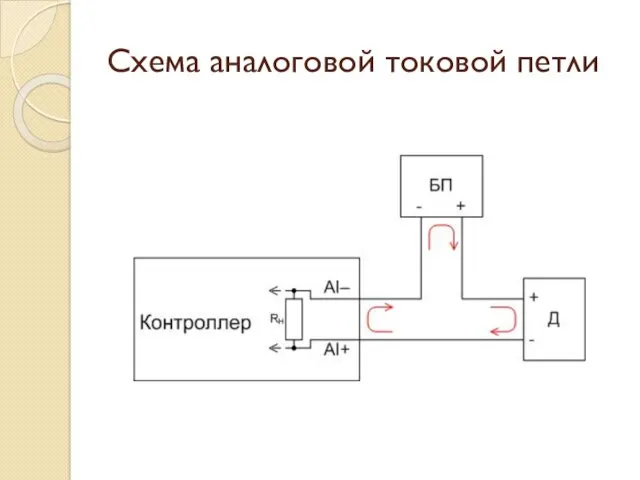
Схема аналоговой токовой петли
Схема аналоговой токовой петли
Реле
Реле (relay) – устройство, принимающее конечное число значений выходной величины под
Реле
Реле (relay) – устройство, принимающее конечное число значений выходной величины под
 Внутренняя среда организма. Значение крови и ее состав
Внутренняя среда организма. Значение крови и ее состав Сосна і ялина
Сосна і ялина Глобальная компьютерная сеть Интернет
Глобальная компьютерная сеть Интернет Данте Алигьери Божественная комедия
Данте Алигьери Божественная комедия Презентация Двигательная активность детей в условиях ограниченного пространства
Презентация Двигательная активность детей в условиях ограниченного пространства Интересные факты из астрономии
Интересные факты из астрономии Санитарная характеристика хозяйственно–бытовых сточных вод и основные методы их очистки
Санитарная характеристика хозяйственно–бытовых сточных вод и основные методы их очистки Презентация к классному часу сам себе я помогу
Презентация к классному часу сам себе я помогу Электрлік сүзгілер
Электрлік сүзгілер Project: Global Social Media Plan // May Topic: Gesture Control Format: video Date: flexible Content
Project: Global Social Media Plan // May Topic: Gesture Control Format: video Date: flexible Content Совещание педагогических работников Псковской области
Совещание педагогических работников Псковской области Архитектура России в начале XIX века
Архитектура России в начале XIX века Создание социальной ситуации развития для участников образовательных отношений в рамках реализации ФГОС ДО
Создание социальной ситуации развития для участников образовательных отношений в рамках реализации ФГОС ДО Готовимся к ЕГЭ по географии
Готовимся к ЕГЭ по географии
 Клас “Ссавці” (звірі)
Клас “Ссавці” (звірі) Наука и образование как феномены культуры
Наука и образование как феномены культуры Ордена СССР
Ордена СССР Факторы, влияющие на климат Евразии
Факторы, влияющие на климат Евразии Живая и неживая природа. Признаки живой природы
Живая и неживая природа. Признаки живой природы Григорий Федорович Пономаренко, великий советский композитор(презентация в школьном музее)
Григорий Федорович Пономаренко, великий советский композитор(презентация в школьном музее) Компоненты компьютерной системы
Компоненты компьютерной системы Синус, косинус и тангенс острого угла прямоугольного треугольника
Синус, косинус и тангенс острого угла прямоугольного треугольника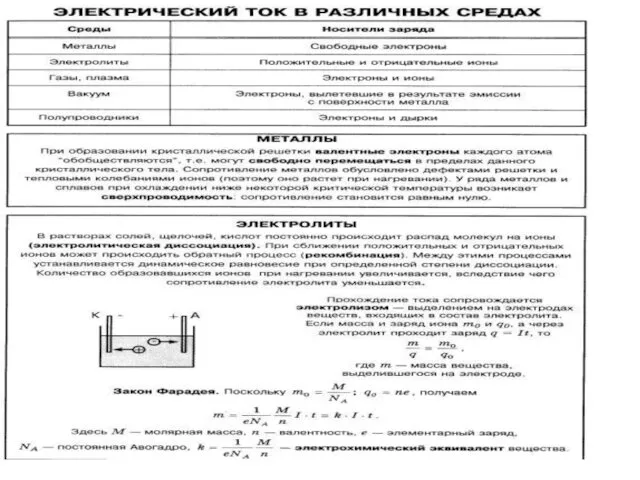 Электрический ток в различных средах
Электрический ток в различных средах Проблемы биотехнической системы выращивания растений
Проблемы биотехнической системы выращивания растений Гендерная сегментация потребителей. Женщины как потребители
Гендерная сегментация потребителей. Женщины как потребители Преобразование базовой основы с втачным рукавом в цельнокроеный рукав
Преобразование базовой основы с втачным рукавом в цельнокроеный рукав Технические каналы утечки информации на объектах информатизации Вооруженных Сил
Технические каналы утечки информации на объектах информатизации Вооруженных Сил