Преобразователи, используемые при испытаниях автомобилей и тракторов. Типичная функциональная схема канала ИИС презентация
- Преобразователи, используемые при испытаниях автомобилей и тракторов. Типичная функциональная схема канала ИИС

Содержание
- 2. Учебные вопросы: Индуктивные преобразователи Магнитоупругие преобразователи Ёмкостные преобразователи Коммутирующие преобразователи Реостатные преобразователи Электролитические преобразователи Преобразователи контактного
- 3. Типичная функциональная схема канала ИИС 1 - чувствительный элемент; 2 – датчик (преобразователь); 3 – каналы
- 4. Классификация преобразователей по назначению (преобразователи перемещений, скоростей, ускорений, сил, давлений, температур и др.); по физическим эффектам,
- 5. у параметрических преобразователей под воздействием измеряемой величины меняется электрический параметр, связанный с эффектом, на основе которого
- 6. в болометрических преобразователях измеряемая физическая величина преобразуется в выходной электрический сигнал опосредованно, то есть через какой-либо
- 7. энергетические (активные) преобразователи под воздействием измеряемой величины вырабатывает (генерирует) сигнал в виде ЭДС.
- 8. Основные требования, предъявляемые к преобразователям: линейная зависимость выходных параметров от входных; необходимая чувствительность; достаточная точность; стабильность
- 9. Основные требования, предъявляемые к преобразователям (продолжение): направленность действия (малое влияние нагрузки в выходной цепи преобразователя на
- 10. Методы преобразования физической величины в электрическую : метод прямого преобразования; метод уравновешивающего преобразования.
- 11. Метод прямого преобразования характеризуется передачей информации только в одном (прямом) направлении – от входной величины X
- 12. Метод уравновешивания характеризуется тем, что используются две цепи преобразователей – цепь прямого преобразования, состоящая из преобразова-телей
- 13. Наиболее часто измеряются следующие группц физических величин: механические величины (линейное и угловое перемещение, линейное и угловое
- 14. Индуктивные преобразователи
- 15. Принцип действия индуктивных преобразователей основан на изменении индуктивного сопротивления электрической цепи под воздействием измеряемой величины (перемещение,
- 16. Основные части простейших индуктивных датчиков: катушка самоиндукции; нагрузка (например, измерительный прибор); источник переменного напряжения; сердечник и
- 17. Ток в катушке подсчитывается по формуле:
- 18. Индуктивность катушки L равна:
- 19. Зависимость индуктивности катушки от воздушного зазора между якорем и сердечником:
- 20. Зависимость тока в катушке от воздушного зазора между якорем и сердечником:
- 21. Простейшая схема индуктивного преобразователя
- 22. Схемы дифференциальных индуктивных преобразователей
- 23. Схема индуктивного преобразователя соленоидного типа
- 24. Индуктивные датчики с переменным воздушным зазором
- 25. Схема потенциометрических датчиков давления
- 26. Типовая частотная характеристика датчика
- 27. 2. Магнитоупругие преобразователи
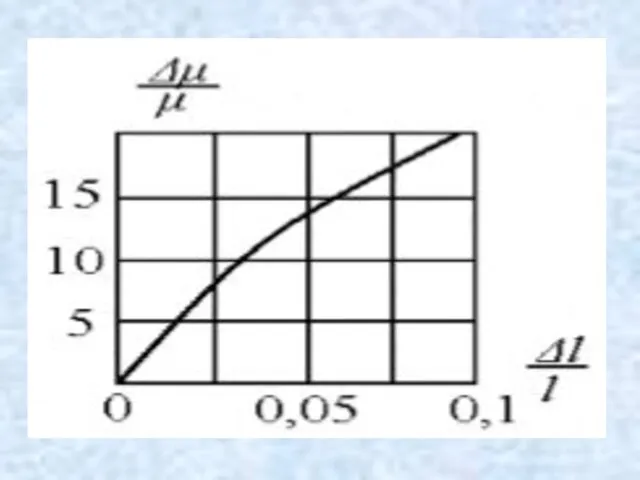
- 28. Принцип действия магнитоурпугих преобразователей
- 29. Характер изменения магнитострикции от напряжения
- 31. Схемы построения магнитоупругих преобразователей
- 32. Магнитоупругие измерители крутящего момента
- 33. Магнитоупругий датчик давления
- 34. 3. Емкостные преобразователи
- 35. Емкость конденсатора
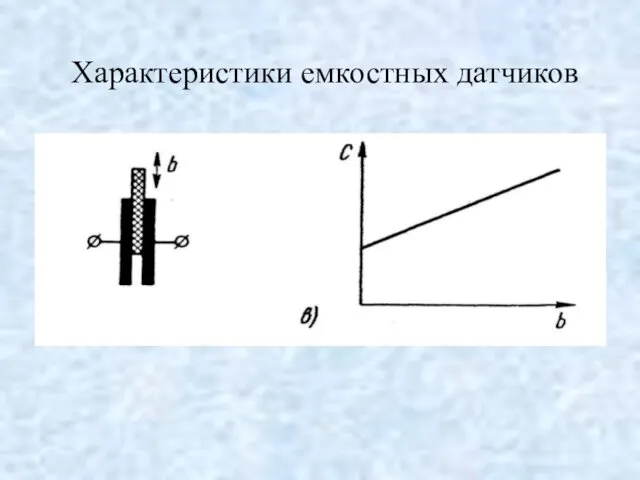
- 36. Характеристики емкостных датчиков
- 37. Характеристики емкостных датчиков
- 38. Характеристики емкостных датчиков
- 39. Схемы построения емкостных преобразователей
- 40. Собственная частота ёмкостных датчиков составляет единицы, десятки и даже сотни килогерц. Рабочий диапазон частот у них
- 41. Достоинства ёмкостных преобразователей: простота конструкции; надёжность в работе; малые габариты и вес; удобство монтажа. Недостатки: высокая
- 42. Ёмкостные преобразователи используются: для измерения линейных и угловых перемещений деталей и органов управления; вибраций (в частности
- 43. 4. Коммутирующие преобразователи
- 44. Виды коммутирующих преобразователей
- 45. Типы коммутирующих преобразователей 1) различные механические замыкатели; 2) электромагнитные реле; 3) полупроводниковые управляемые элементы; 4) магнитоуправляемые
- 46. Характеристики коммутирующих преобразователей 1) порог срабатывания − минимальное значение изменения сигнала на входе, при котором изменяется
- 47. Схема простейшего геркона Подразделяются герконы на замыкающие, размыкающие и переключающие.
- 48. Достоинства герконов: простота конструкции; малые габариты и вес; безинерционность; надёжность в работе; удобство монтажа; низкая стоимость;
- 49. 5. Реостатные преобразователи
- 50. Датчики реостатного типа представляют собой регулируемые омические сопротивления специальных исполнений. К этим датчикам предъявляется требование однозначной
- 51. Минимальная величина перемещения щётки, на которую реагирует датчик равна толщине провода, поэтому она называется разрешающей способностью.
- 52. Виды исполнения реостатных преобразователей В виде обмотки на каркасе. Реохордного типа (натянутая металлическая нить) и перемещаемый
- 53. Характеристики реостатных преобразователей Точность работы проволочных реостатных датчиков, как правило, колеблется в пределах от 0,1% до
- 54. Схема построения реостатных преобразователей
- 55. Преимущества реостатных преобразователей: лёгкая воспроизводимость характеристик; большая выходная мощность, что позволяет обходиться без усилителя; достаточная чувствительность;
- 56. Недостатки реостатных преобразователей, выполненных ввиде обмотки: ступенчатое изменение сопротивления при непрерывном изменении измеряемого процесса; увеличение числа
- 57. Область применения реостатных преобразователей Реостатные преобразователи позволяют измерять как линейные, так и угловые перемещения. Для измерения
- 58. 6. Электролитические преобразователи
- 59. Действие электролитических преобразователей основано на изменении сопротивления электропроводящей жидкости (электролита) при взаимном перемещении электродов, помещённых в
- 60. Схема построения электролитического преобразователя Питание электрической цепи, в которую включаются эти датчики, осуществляется только переменным током
- 61. Сопротивление электропроводящей жидкости в значительной степени зависит: от удельного сопротивления электролита, расстояния между электродами, площади соприкосновения
- 62. Достоинства электролитических преобразователей: простота конструкции; малые габариты; невысокая стоимость; возможность пропускания больших токов; незначительное усилие, требуемое
- 63. Существенным недостатком электролитических датчиков, резко ограничивающим их применение, является значительная зависимость сопротивления электролита от температуры (при
- 64. Область применения электролитических датчиков Применяются электролитические датчики в основном для измерения линейных и угловых микроперемещений, микродеформаций,
- 65. 7. Преобразователи контактного сопротивления
- 66. Действие преобразователей контактного сопротивления основано на зависимости переходного сопротивления контактов от усилия их сжатия.
- 67. Переходное сопротивление контактов
- 68. Схема построения датчика контактного сопротивления Рабочая характеристика угольных столбиков обладает значительным гистерезисом, то есть сопротивление датчика
- 69. Достоинства контактных преобразователей: простота и дешевизна конструкции; хорошая чувствительность; возможность пропускания больших токов, что позволяет обходиться
- 70. Недостатки контактных преобразователей: невысокая точность; подверженность воздействию вибраций; нестабильность работы; нелинейность характеристики; невзаимозаменяемость.
- 72. Скачать презентацию
Учебные вопросы:
Индуктивные преобразователи
Магнитоупругие преобразователи
Ёмкостные преобразователи
Коммутирующие преобразователи
Реостатные преобразователи
Электролитические преобразователи
Преобразователи контактного сопротивления
Учебные вопросы:
Индуктивные преобразователи
Магнитоупругие преобразователи
Ёмкостные преобразователи
Коммутирующие преобразователи
Реостатные преобразователи
Электролитические преобразователи
Преобразователи контактного сопротивления
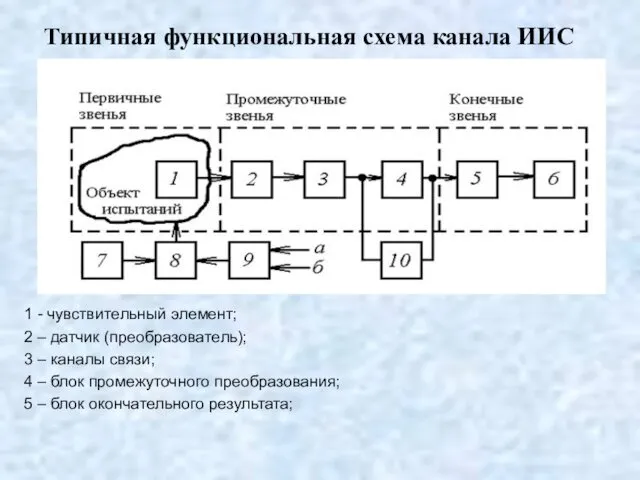
Типичная функциональная схема канала ИИС
1 - чувствительный элемент;
2 – датчик (преобразователь);
3
Типичная функциональная схема канала ИИС
1 - чувствительный элемент;
2 – датчик (преобразователь);
3
Классификация преобразователей
по назначению (преобразователи перемещений, скоростей, ускорений, сил, давлений, температур и
Классификация преобразователей
по назначению (преобразователи перемещений, скоростей, ускорений, сил, давлений, температур и
у параметрических преобразователей под воздействием измеряемой величины меняется электрический параметр, связанный
у параметрических преобразователей под воздействием измеряемой величины меняется электрический параметр, связанный
в болометрических преобразователях измеряемая физическая величина преобразуется в выходной электрический сигнал
в болометрических преобразователях измеряемая физическая величина преобразуется в выходной электрический сигнал
энергетические (активные) преобразователи под воздействием измеряемой величины вырабатывает (генерирует) сигнал в
энергетические (активные) преобразователи под воздействием измеряемой величины вырабатывает (генерирует) сигнал в
Основные требования, предъявляемые к преобразователям:
линейная зависимость выходных параметров от входных;
необходимая чувствительность;
достаточная
Основные требования, предъявляемые к преобразователям:
линейная зависимость выходных параметров от входных;
необходимая чувствительность;
достаточная
Основные требования, предъявляемые к преобразователям (продолжение):
направленность действия (малое влияние нагрузки в
Основные требования, предъявляемые к преобразователям (продолжение):
направленность действия (малое влияние нагрузки в
Методы преобразования физической величины в электрическую :
метод прямого преобразования;
метод уравновешивающего
Методы преобразования физической величины в электрическую :
метод прямого преобразования;
метод уравновешивающего
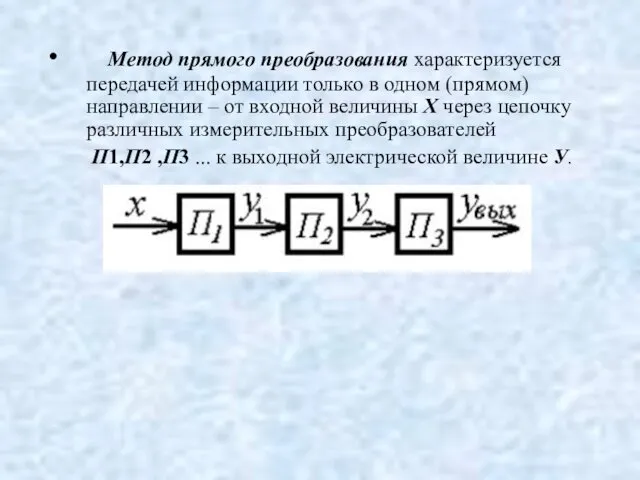
Метод прямого преобразования характеризуется передачей информации только в одном (прямом) направлении
Метод прямого преобразования характеризуется передачей информации только в одном (прямом) направлении
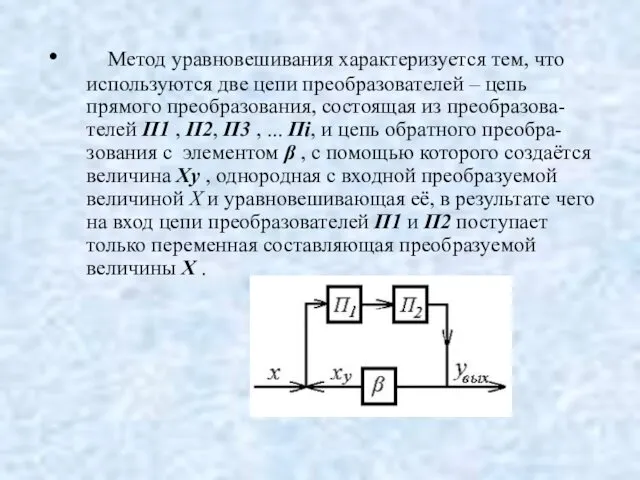
Метод уравновешивания характеризуется тем, что используются две цепи преобразователей – цепь
Метод уравновешивания характеризуется тем, что используются две цепи преобразователей – цепь
Наиболее часто измеряются следующие группц физических величин:
механические величины (линейное и
Наиболее часто измеряются следующие группц физических величин:
механические величины (линейное и
Индуктивные преобразователи
Индуктивные преобразователи
Принцип действия индуктивных преобразователей основан на изменении индуктивного сопротивления электрической цепи
Принцип действия индуктивных преобразователей основан на изменении индуктивного сопротивления электрической цепи
Основные части простейших индуктивных датчиков:
катушка самоиндукции;
нагрузка (например, измерительный прибор);
источник переменного
Основные части простейших индуктивных датчиков:
катушка самоиндукции;
нагрузка (например, измерительный прибор);
источник переменного
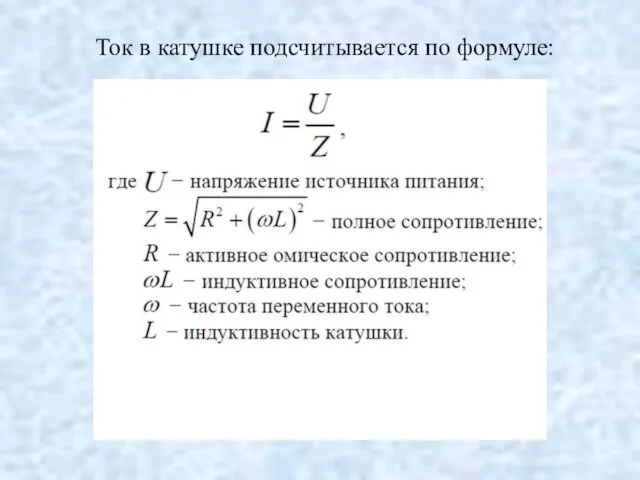
Ток в катушке подсчитывается по формуле:
Ток в катушке подсчитывается по формуле:
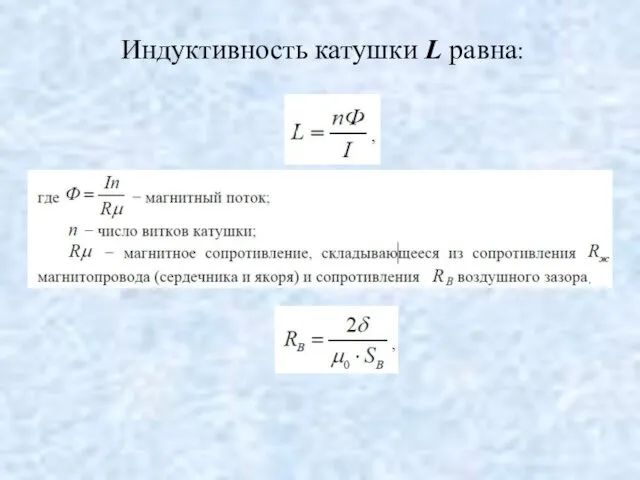
Индуктивность катушки L равна:
Индуктивность катушки L равна:
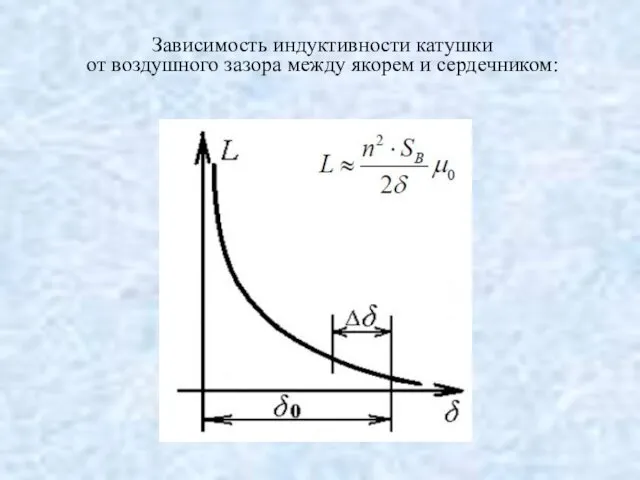
Зависимость индуктивности катушки
от воздушного зазора между якорем и сердечником:
Зависимость индуктивности катушки
от воздушного зазора между якорем и сердечником:
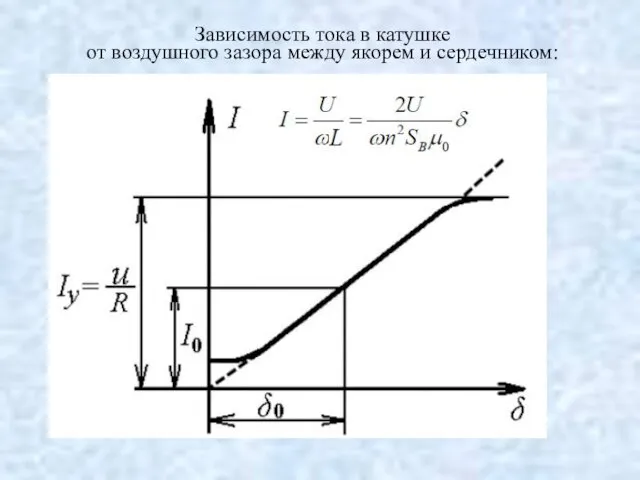
Зависимость тока в катушке
от воздушного зазора между якорем и сердечником:
Зависимость тока в катушке
от воздушного зазора между якорем и сердечником:
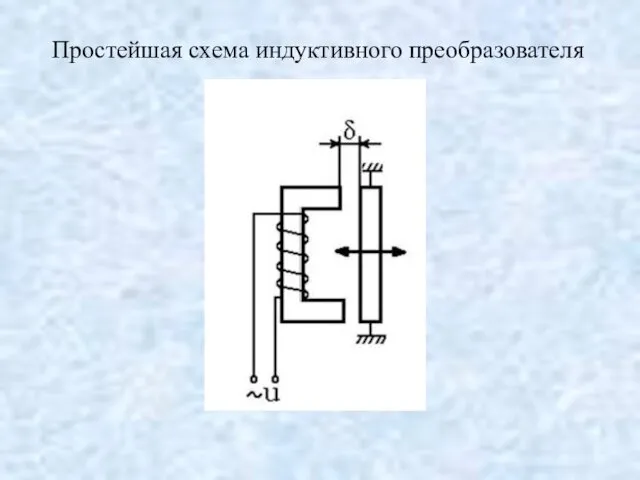
Простейшая схема индуктивного преобразователя
Простейшая схема индуктивного преобразователя
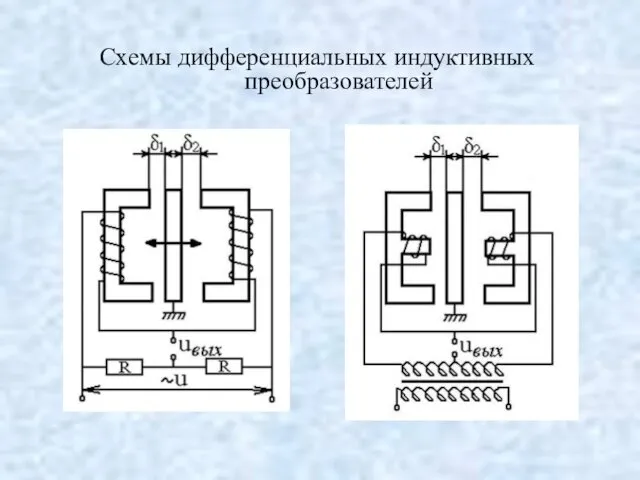
Схемы дифференциальных индуктивных преобразователей
Схемы дифференциальных индуктивных преобразователей

Схема индуктивного преобразователя
соленоидного типа
Схема индуктивного преобразователя
соленоидного типа
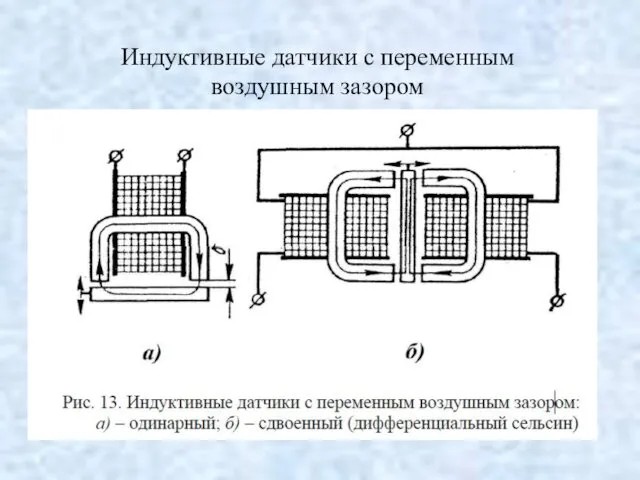
Индуктивные датчики с переменным
воздушным зазором
Индуктивные датчики с переменным
воздушным зазором

Схема потенциометрических датчиков давления
Схема потенциометрических датчиков давления
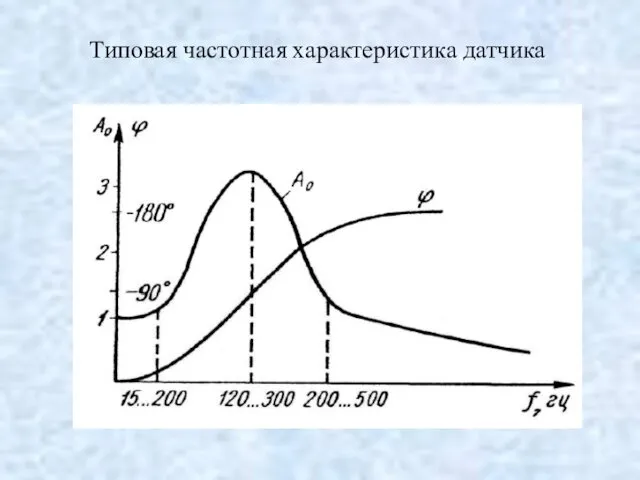
Типовая частотная характеристика датчика
Типовая частотная характеристика датчика
2. Магнитоупругие преобразователи
2. Магнитоупругие преобразователи
Принцип действия магнитоурпугих преобразователей
Принцип действия магнитоурпугих преобразователей
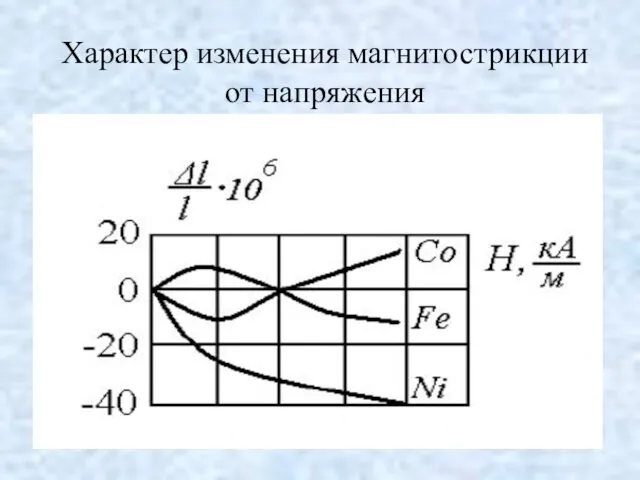
Характер изменения магнитострикции от напряжения
Характер изменения магнитострикции от напряжения
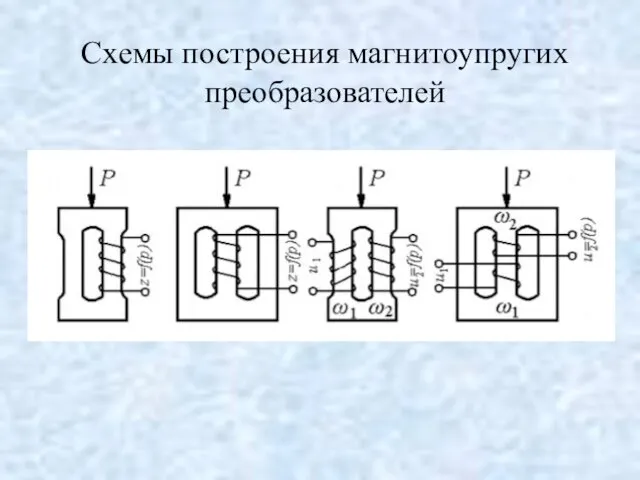
Схемы построения магнитоупругих преобразователей
Схемы построения магнитоупругих преобразователей

Магнитоупругие измерители крутящего момента
Магнитоупругие измерители крутящего момента

Магнитоупругий датчик давления
Магнитоупругий датчик давления
3. Емкостные преобразователи
3. Емкостные преобразователи
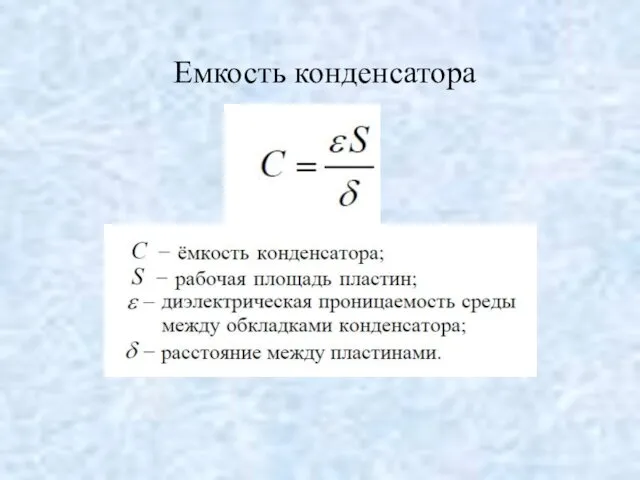
Емкость конденсатора
Емкость конденсатора

Характеристики емкостных датчиков
Характеристики емкостных датчиков

Характеристики емкостных датчиков
Характеристики емкостных датчиков
Характеристики емкостных датчиков
Характеристики емкостных датчиков

Схемы построения емкостных преобразователей
Схемы построения емкостных преобразователей
Собственная частота ёмкостных датчиков составляет единицы, десятки и даже сотни килогерц.
Собственная частота ёмкостных датчиков составляет единицы, десятки и даже сотни килогерц.
Достоинства ёмкостных преобразователей:
простота конструкции;
надёжность в работе;
малые габариты и вес;
удобство монтажа.
Недостатки:
высокая
Достоинства ёмкостных преобразователей:
простота конструкции;
надёжность в работе;
малые габариты и вес;
удобство монтажа.
Недостатки:
высокая
Ёмкостные преобразователи используются:
для измерения линейных и угловых перемещений деталей и органов
Ёмкостные преобразователи используются:
для измерения линейных и угловых перемещений деталей и органов
4. Коммутирующие преобразователи
4. Коммутирующие преобразователи
Виды коммутирующих преобразователей
Виды коммутирующих преобразователей
Типы коммутирующих преобразователей
1) различные механические замыкатели;
2) электромагнитные реле;
3) полупроводниковые управляемые элементы;
4)
Типы коммутирующих преобразователей
1) различные механические замыкатели;
2) электромагнитные реле;
3) полупроводниковые управляемые элементы;
4)
Характеристики коммутирующих преобразователей
1) порог срабатывания − минимальное значение изменения сигнала на
Характеристики коммутирующих преобразователей
1) порог срабатывания − минимальное значение изменения сигнала на
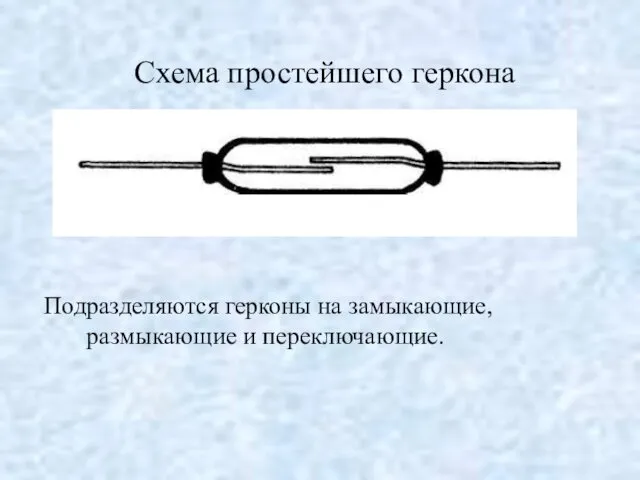
Схема простейшего геркона
Подразделяются герконы на замыкающие, размыкающие и переключающие.
Схема простейшего геркона
Подразделяются герконы на замыкающие, размыкающие и переключающие.
Достоинства герконов:
простота конструкции;
малые габариты и вес;
безинерционность;
надёжность в работе;
удобство монтажа;
низкая стоимость;
отсутствие регулировок;
работа
Достоинства герконов:
простота конструкции;
малые габариты и вес;
безинерционность;
надёжность в работе;
удобство монтажа;
низкая стоимость;
отсутствие регулировок;
работа
5. Реостатные преобразователи
5. Реостатные преобразователи
Датчики реостатного типа представляют собой регулируемые омические сопротивления специальных исполнений.
К этим
Датчики реостатного типа представляют собой регулируемые омические сопротивления специальных исполнений.
К этим
Минимальная величина перемещения щётки, на которую реагирует датчик равна толщине провода,
Минимальная величина перемещения щётки, на которую реагирует датчик равна толщине провода,
Виды исполнения реостатных преобразователей
В виде обмотки на каркасе.
Реохордного типа (натянутая металлическая
Виды исполнения реостатных преобразователей
В виде обмотки на каркасе.
Реохордного типа (натянутая металлическая
Характеристики реостатных преобразователей
Точность работы проволочных реостатных датчиков, как правило, колеблется в
Характеристики реостатных преобразователей
Точность работы проволочных реостатных датчиков, как правило, колеблется в

Схема построения реостатных преобразователей
Схема построения реостатных преобразователей
Преимущества реостатных преобразователей:
лёгкая воспроизводимость характеристик;
большая выходная мощность, что позволяет обходиться без
лёгкая воспроизводимость характеристик;
большая выходная мощность, что позволяет обходиться без
Недостатки реостатных преобразователей, выполненных ввиде обмотки:
ступенчатое изменение сопротивления при непрерывном изменении
Недостатки реостатных преобразователей, выполненных ввиде обмотки:
ступенчатое изменение сопротивления при непрерывном изменении
Область применения реостатных преобразователей
Реостатные преобразователи позволяют измерять как линейные, так и
Область применения реостатных преобразователей
Реостатные преобразователи позволяют измерять как линейные, так и
6. Электролитические преобразователи
6. Электролитические преобразователи
Действие электролитических преобразователей основано на изменении сопротивления электропроводящей жидкости (электролита) при
Действие электролитических преобразователей основано на изменении сопротивления электропроводящей жидкости (электролита) при

Схема построения электролитического преобразователя
Питание электрической цепи, в которую включаются эти датчики,
Схема построения электролитического преобразователя
Питание электрической цепи, в которую включаются эти датчики,
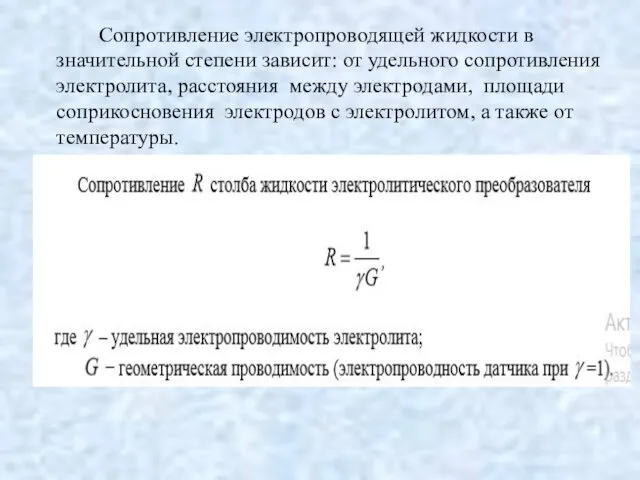
Сопротивление электропроводящей жидкости в значительной степени зависит: от удельного сопротивления электролита,
Сопротивление электропроводящей жидкости в значительной степени зависит: от удельного сопротивления электролита,
Достоинства электролитических преобразователей:
простота конструкции;
малые габариты;
невысокая стоимость;
возможность пропускания больших токов;
незначительное усилие, требуемое
Достоинства электролитических преобразователей:
простота конструкции;
малые габариты;
невысокая стоимость;
возможность пропускания больших токов;
незначительное усилие, требуемое
Существенным недостатком электролитических датчиков, резко ограничивающим их применение, является значительная зависимость
Существенным недостатком электролитических датчиков, резко ограничивающим их применение, является значительная зависимость
Область применения электролитических датчиков
Применяются электролитические датчики в основном для измерения линейных
Область применения электролитических датчиков
Применяются электролитические датчики в основном для измерения линейных
7. Преобразователи контактного сопротивления
7. Преобразователи контактного сопротивления
Действие преобразователей контактного сопротивления основано на зависимости переходного сопротивления контактов от
Действие преобразователей контактного сопротивления основано на зависимости переходного сопротивления контактов от
Переходное сопротивление контактов
Переходное сопротивление контактов
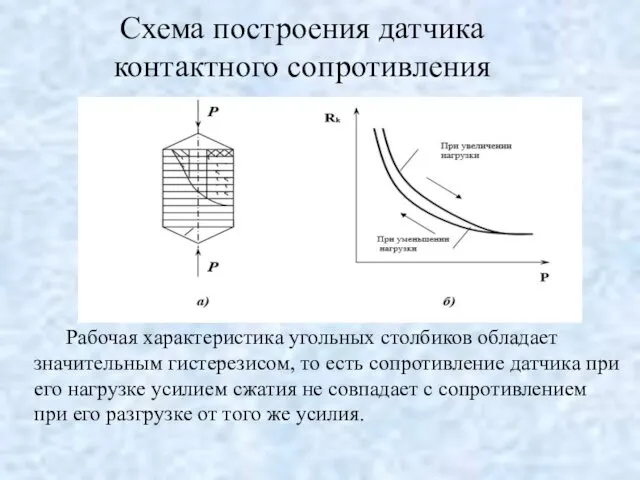
Схема построения датчика контактного сопротивления
Рабочая характеристика угольных столбиков обладает значительным гистерезисом,
Схема построения датчика контактного сопротивления
Рабочая характеристика угольных столбиков обладает значительным гистерезисом,
Достоинства контактных преобразователей:
простота и дешевизна конструкции;
хорошая чувствительность;
возможность пропускания больших токов, что
Достоинства контактных преобразователей:
простота и дешевизна конструкции;
хорошая чувствительность;
возможность пропускания больших токов, что
Недостатки контактных преобразователей:
невысокая точность;
подверженность воздействию вибраций;
нестабильность работы;
нелинейность характеристики;
невзаимозаменяемость.
Недостатки контактных преобразователей:
невысокая точность;
подверженность воздействию вибраций;
нестабильность работы;
нелинейность характеристики;
невзаимозаменяемость.
 1С:КАССА. Доступная онлайн-касса с облачной системой товароучета для малой розницы
1С:КАССА. Доступная онлайн-касса с облачной системой товароучета для малой розницы Первые христиане
Первые христиане Как пользоваться сайтом i-exem
Как пользоваться сайтом i-exem Непредельные углеводороды
Непредельные углеводороды Русские народные музыкальные инструменты
Русские народные музыкальные инструменты Операции на пищеводе, показание, виды
Операции на пищеводе, показание, виды Разработка 10-балльной шкалы оценки степени обученности обучающегося по преподаваемому предмету
Разработка 10-балльной шкалы оценки степени обученности обучающегося по преподаваемому предмету Техника и технологии в сельском хозяйстве. Агроинженерия. Лекция 1
Техника и технологии в сельском хозяйстве. Агроинженерия. Лекция 1 Презентация педагогического опыта
Презентация педагогического опыта Рабочая неделя Главы Тракторозаводского района
Рабочая неделя Главы Тракторозаводского района Микеланджело Буонарроти (1475 – 1564)
Микеланджело Буонарроти (1475 – 1564) Забытая война. К 100-летию начала Первой мировой войны
Забытая война. К 100-летию начала Первой мировой войны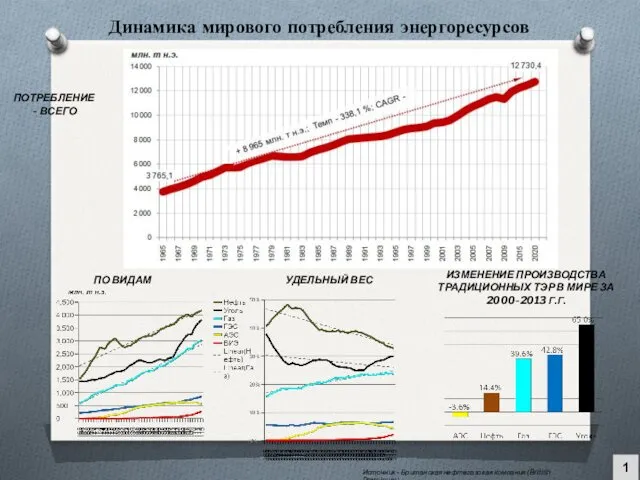 Динамика мирового потребления энергоресурсов. Лекция 1
Динамика мирового потребления энергоресурсов. Лекция 1 Имандылық жарасады ұл-қызға
Имандылық жарасады ұл-қызға Производные пиррозилидина. (Лекция 6)
Производные пиррозилидина. (Лекция 6) Цветок
Цветок Породы крупного рогатого скота молочного направления
Породы крупного рогатого скота молочного направления Организация образовательного пространства дошкольной образовательной организации в соответствии с ФГОС
Организация образовательного пространства дошкольной образовательной организации в соответствии с ФГОС Фотоальбом. Для Алексея
Фотоальбом. Для Алексея Каталог тканей. Оплата и доставка
Каталог тканей. Оплата и доставка История Военно-Морского Флота Российской Федерации
История Военно-Морского Флота Российской Федерации Порты ввода-вывода
Порты ввода-вывода Нормативно-правовые акты, гарантирующие право получения детям с ограниченными возможностями здоровья адекватного их возможностям образования
Нормативно-правовые акты, гарантирующие право получения детям с ограниченными возможностями здоровья адекватного их возможностям образования 20231203_zapovedniki-russia
20231203_zapovedniki-russia План-конспект и презентация классного часа на тему Все профессии нужны, все профессии важны!
План-конспект и презентация классного часа на тему Все профессии нужны, все профессии важны! Комплексные числа. Модуль и аргумент комплексного числа
Комплексные числа. Модуль и аргумент комплексного числа Экскурсия Улицы родного села.
Экскурсия Улицы родного села. Многофункциональный жилой дом
Многофункциональный жилой дом