Приборное оборудование аналоговых комплексов ПНО. Автомат углов атаки и сигнализации перегрузки. Режимы работы презентация
- Приборное оборудование аналоговых комплексов ПНО. Автомат углов атаки и сигнализации перегрузки. Режимы работы

Содержание
- 2. 5. Автомат углов атаки и сигнализации перегрузки (АУАСП) Назначение. Автомат углов атаки и перегрузок (АУАСП) устанавливается
- 3. Состав автомата углов атаки и сигнализации перегрузки 1 - блок коммутации БК; 2 - датчик критических
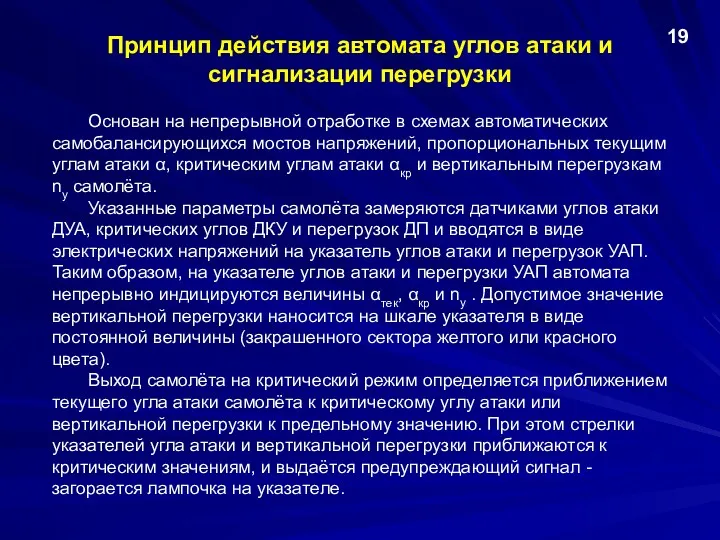
- 4. Принцип действия автомата углов атаки и сигнализации перегрузки 19 Основан на непрерывной отработке в схемах автоматических
- 5. Принцип действия автомата углов атаки и сигнализации перегрузки 18 Одновременно в самолётную систему выдаётся сигналы «критического
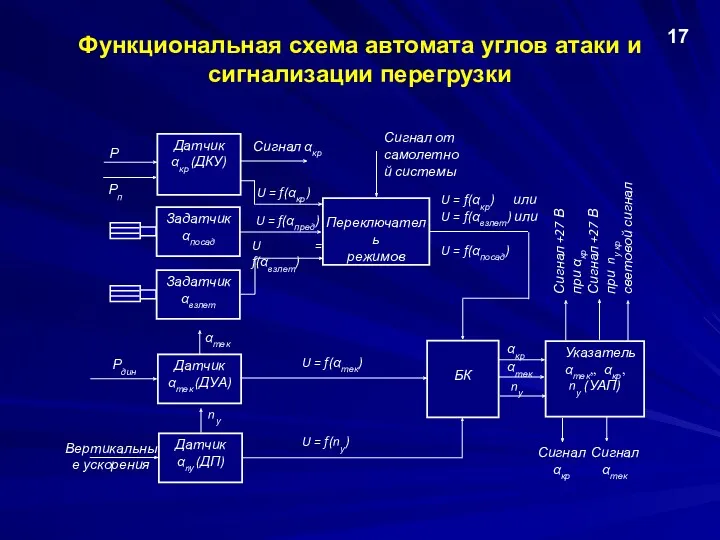
- 6. Функциональная схема автомата углов атаки и сигнализации перегрузки 17
- 7. Датчики сигналов ДКУ, ДП, ДУА 16 Вертикальное ускорение ny измеряется датчиком перегрузки ДП, а текущий угол
- 8. Датчик критических углов 14 Датчик критических углов ДКУ стоит из собственно датчика и монтажного кронштейна с
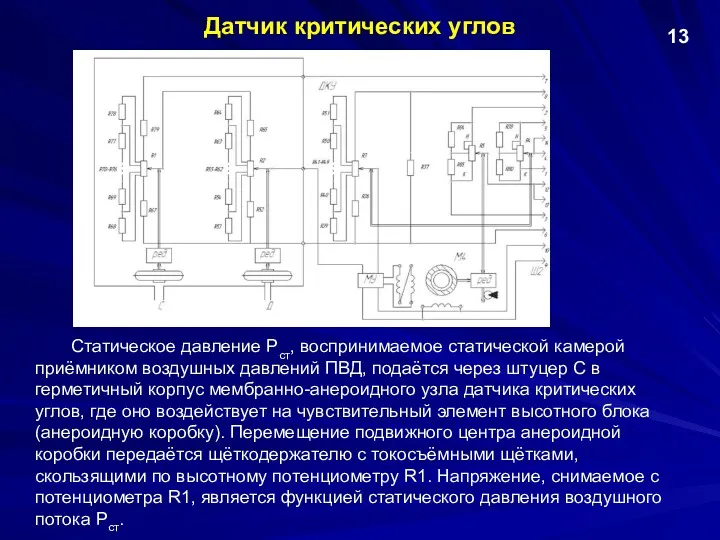
- 9. Датчик критических углов 13 Статическое давление Рст, воспринимаемое статической камерой приёмником воздушных давлений ПВД, подаётся через
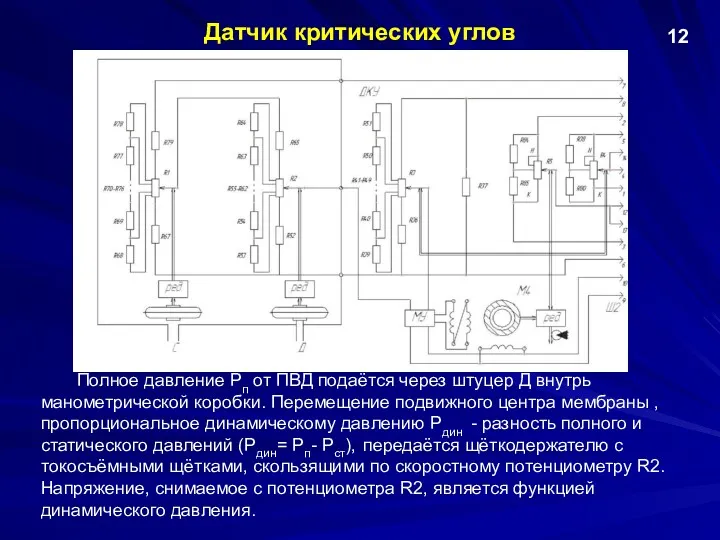
- 10. Датчик критических углов 12 Полное давление Рп от ПВД подаётся через штуцер Д внутрь манометрической коробки.
- 11. Таким образом, получают необходимую информацию для вычисления числа Маха полёта, величина которого определяет критический угол атаки.
- 12. Датчик критических углов 10 Это напряжение сравнивается с напряжением U3 потенциометра отработки R3 и подаётся на
- 13. Датчик критических углов 9 Щётки потенциометра отработки R3 и выходных потенциометров R4 и R5 укреплены на
- 14. Текущие местные углы атаки измеряются с помощью флюгерного датчика типа ДУА, устанавливаемого на фюзеляже самолёта. Датчик
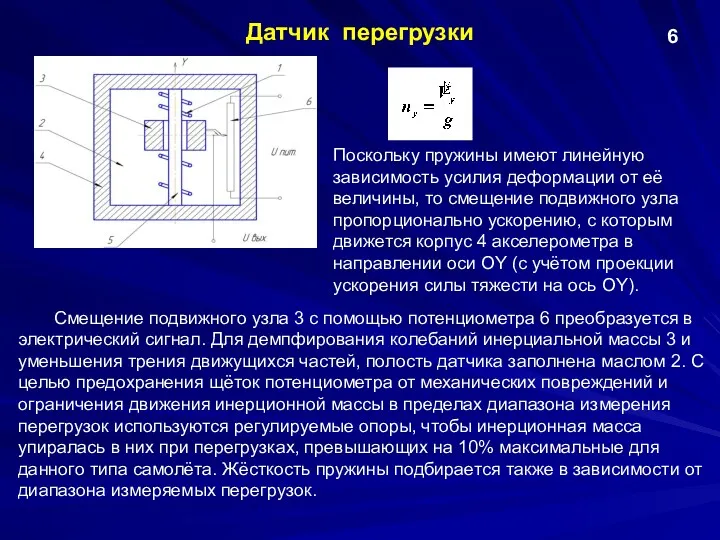
- 15. Датчик перегрузки предназначен для измерения вертикальных перегрузок, действующих по оси OY самолёта (вертикальная ось). Датчик перегрузки
- 16. Датчик перегрузки 6 Смещение подвижного узла 3 с помощью потенциометра 6 преобразуется в электрический сигнал. Для
- 17. Индикация и сигнализация автомата АУАСП 5 Указатель УАП предназначен для преобразования электрических величин, пропорциональных αтек, αкр
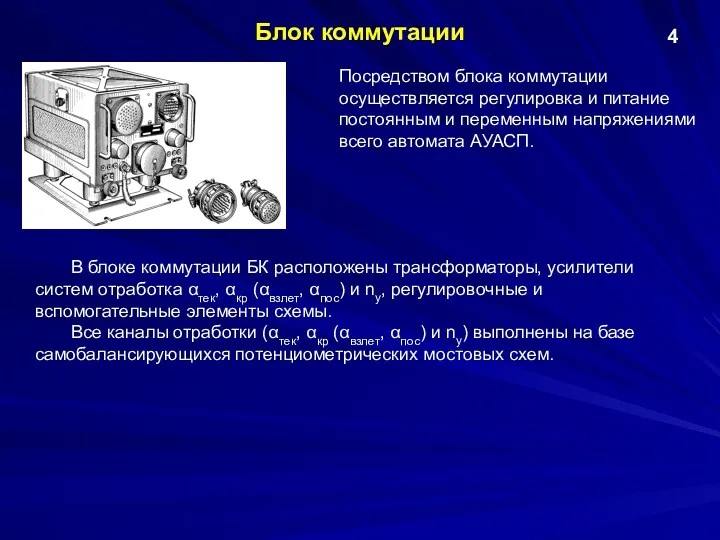
- 18. Блок коммутации 4 Посредством блока коммутации осуществляется регулировка и питание постоянным и переменным напряжениями всего автомата
- 19. Режимы работы («Полет», «Взлет», Посадка», «Контроль») 3 Переключатель режимов подключает определённый канал ограничения αкр . Переключатель
- 20. Режимы работы автомата углов атаки и перегрузки 3 Автомат имеет четыре режима работы: 1. Режим «Полёт».
- 21. Режимы работы автомата углов атаки и перегрузки 2 Автомат имеет четыре режима работы: 4. Режим «Контроль».
- 22. Режимы работы автомата углов атаки и перегрузки 1 Для автомата АУАСП характерны погрешности, в основном вносимые
- 23. 6. Система сигнализации опасной скорости сближения самолета с землей (ССОС) 6 Назначение. Системы сигнализации опасной скорости
- 24. 6. Система сигнализации опасной скорости сближения самолета с землей (ССОС) 5 Состав. В комплект ССОС входят:
- 25. 6. Система сигнализации опасной скорости сближения самолета с землей (ССОС) 4 Функциональная схема ССОС. Входными сигналами
- 26. 6. Система сигнализации опасной скорости сближения самолета с землей (ССОС) 3 Работа ССОС. Комплексирование бароинерциальной Vy
- 27. 6. Система сигнализации опасной скорости сближения самолета с землей (ССОС) 2 Работа ССОС. Вычислитель ВЛ включает
- 29. Скачать презентацию

5. Автомат углов атаки и сигнализации перегрузки (АУАСП)
Назначение. Автомат углов
5. Автомат углов атаки и сигнализации перегрузки (АУАСП)
Назначение. Автомат углов

Состав автомата углов атаки и сигнализации перегрузки
1 - блок коммутации БК;
Состав автомата углов атаки и сигнализации перегрузки
1 - блок коммутации БК;
Принцип действия автомата углов атаки и сигнализации перегрузки
19
Основан на непрерывной отработке
Принцип действия автомата углов атаки и сигнализации перегрузки
19
Основан на непрерывной отработке

Принцип действия автомата углов атаки и сигнализации перегрузки
18
Одновременно в самолётную
Принцип действия автомата углов атаки и сигнализации перегрузки
18
Одновременно в самолётную
Функциональная схема автомата углов атаки и сигнализации перегрузки
17
Функциональная схема автомата углов атаки и сигнализации перегрузки
17
Датчики сигналов ДКУ, ДП, ДУА
16
Вертикальное ускорение ny измеряется датчиком перегрузки
Датчики сигналов ДКУ, ДП, ДУА
16
Вертикальное ускорение ny измеряется датчиком перегрузки

Датчик критических углов
14
Датчик критических углов ДКУ стоит из собственно датчика
Датчик критических углов
14
Датчик критических углов ДКУ стоит из собственно датчика
Датчик критических углов
13
Статическое давление Рст, воспринимаемое статической камерой приёмником воздушных давлений
Датчик критических углов
13
Статическое давление Рст, воспринимаемое статической камерой приёмником воздушных давлений
Датчик критических углов
12
Полное давление Рп от ПВД подаётся через штуцер Д
Датчик критических углов
12
Полное давление Рп от ПВД подаётся через штуцер Д
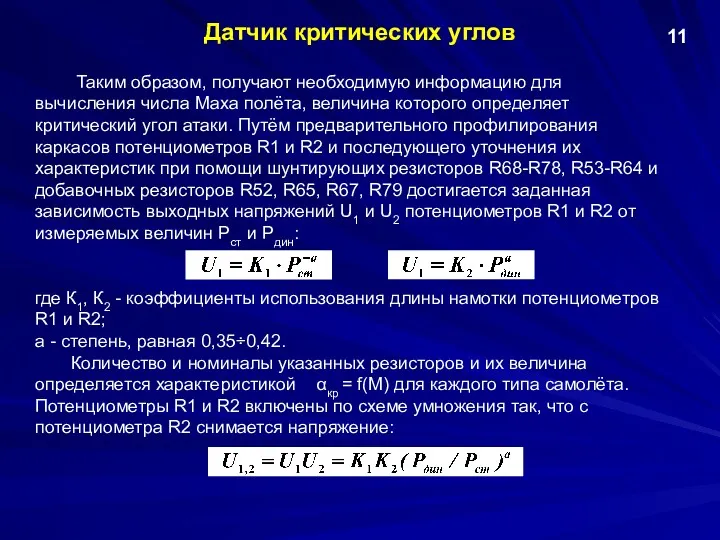
Таким образом, получают необходимую информацию для вычисления числа Маха полёта,
Таким образом, получают необходимую информацию для вычисления числа Маха полёта,

Датчик критических углов
10
Это напряжение сравнивается с напряжением U3 потенциометра отработки
Датчик критических углов
10
Это напряжение сравнивается с напряжением U3 потенциометра отработки

Датчик критических углов
9
Щётки потенциометра отработки R3 и выходных потенциометров R4 и
Датчик критических углов
9
Щётки потенциометра отработки R3 и выходных потенциометров R4 и
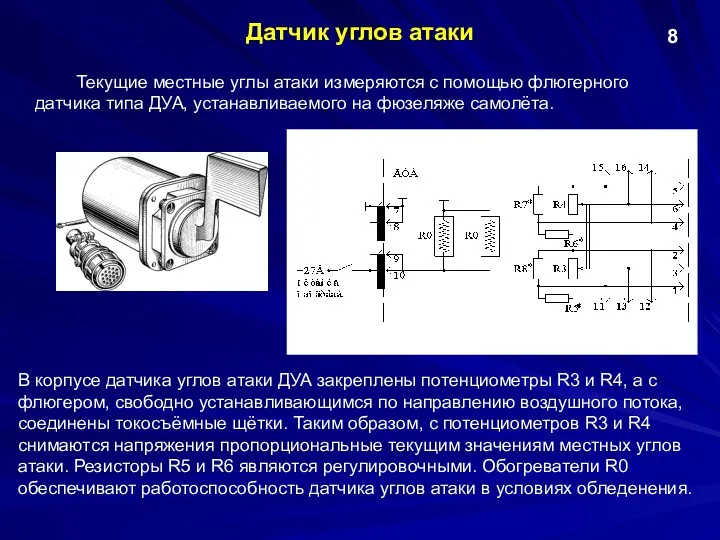
Текущие местные углы атаки измеряются с помощью флюгерного датчика типа
Текущие местные углы атаки измеряются с помощью флюгерного датчика типа
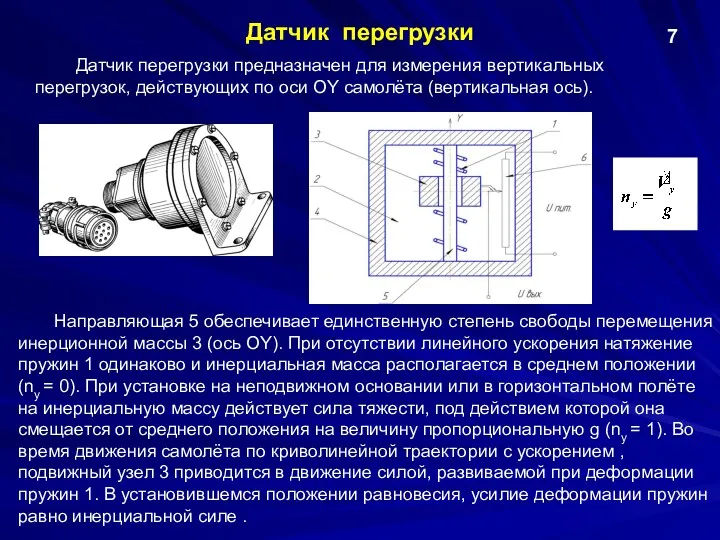
Датчик перегрузки предназначен для измерения вертикальных перегрузок, действующих по оси
Датчик перегрузки предназначен для измерения вертикальных перегрузок, действующих по оси
Датчик перегрузки
6
Смещение подвижного узла 3 с помощью потенциометра 6 преобразуется
Датчик перегрузки
6
Смещение подвижного узла 3 с помощью потенциометра 6 преобразуется

Индикация и сигнализация автомата АУАСП
5
Указатель УАП предназначен для преобразования электрических величин,
Индикация и сигнализация автомата АУАСП
5
Указатель УАП предназначен для преобразования электрических величин,
Блок коммутации
4
Посредством блока коммутации осуществляется регулировка и питание постоянным и переменным
Блок коммутации
4
Посредством блока коммутации осуществляется регулировка и питание постоянным и переменным
Режимы работы («Полет», «Взлет», Посадка», «Контроль»)
3
Переключатель режимов подключает определённый канал
Режимы работы («Полет», «Взлет», Посадка», «Контроль»)
3
Переключатель режимов подключает определённый канал
Режимы работы автомата углов атаки и перегрузки
3
Автомат имеет четыре режима работы:
1.
Режимы работы автомата углов атаки и перегрузки
3
Автомат имеет четыре режима работы:
1.
Режимы работы автомата углов атаки и перегрузки
2
Автомат имеет четыре режима работы:
4.
Режимы работы автомата углов атаки и перегрузки
2
Автомат имеет четыре режима работы:
4.
Режимы работы автомата углов атаки и перегрузки
1
Для автомата АУАСП характерны погрешности,
Режимы работы автомата углов атаки и перегрузки
1
Для автомата АУАСП характерны погрешности,
6. Система сигнализации опасной скорости сближения самолета с землей (ССОС)
6
Назначение. Системы
6. Система сигнализации опасной скорости сближения самолета с землей (ССОС)
6
Назначение. Системы

6. Система сигнализации опасной скорости сближения самолета с землей (ССОС)
5
Состав. В
6. Система сигнализации опасной скорости сближения самолета с землей (ССОС)
5
Состав. В

6. Система сигнализации опасной скорости сближения самолета с землей (ССОС)
4
Функциональная схема
6. Система сигнализации опасной скорости сближения самолета с землей (ССОС)
4
Функциональная схема

6. Система сигнализации опасной скорости сближения самолета с землей (ССОС)
3
Работа ССОС.
6. Система сигнализации опасной скорости сближения самолета с землей (ССОС)
3
Работа ССОС.

6. Система сигнализации опасной скорости сближения самолета с землей (ССОС)
2
Работа ССОС.
6. Система сигнализации опасной скорости сближения самолета с землей (ССОС)
2
Работа ССОС.
 Основы инженерно-технического обеспечения служебной деятельности подразделений УИС
Основы инженерно-технического обеспечения служебной деятельности подразделений УИС Проблема финансовой системы Японии. Компании-зомби
Проблема финансовой системы Японии. Компании-зомби Решение вычислительных задач на компьютере
Решение вычислительных задач на компьютере Лекция 4. Стандарты разработки программных средств
Лекция 4. Стандарты разработки программных средств Кольорова металургія України
Кольорова металургія України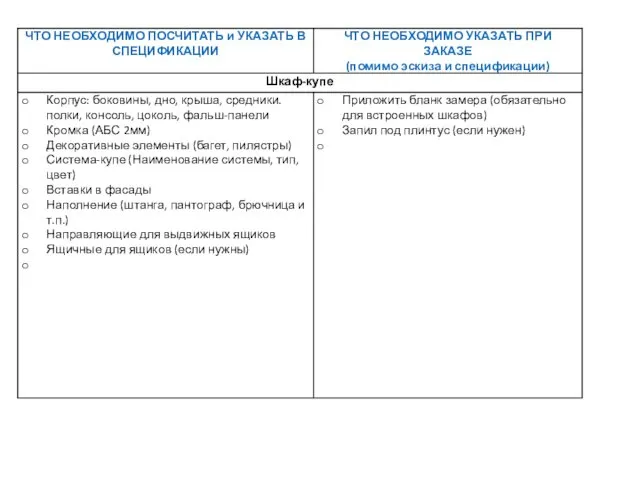 Шкаф-купе. Спецификации
Шкаф-купе. Спецификации Христианские праздники и традиции их празднования на Руси
Христианские праздники и традиции их празднования на Руси Час занимательной математики. 5 класс
Час занимательной математики. 5 класс Электрохимическое формообразование резистивными электродами
Электрохимическое формообразование резистивными электродами Профілактика та протидія нелегальній міграції та торгівлі людьми
Профілактика та протидія нелегальній міграції та торгівлі людьми Искусство в религиозной культуре
Искусство в религиозной культуре Анализ объема продаж и выявление влияния факторов на его изменение
Анализ объема продаж и выявление влияния факторов на его изменение В.И. Ленин (Ульянов)
В.И. Ленин (Ульянов) Безпліддя як медико-соціальна проблема. Альтернативний погляд на проблему
Безпліддя як медико-соціальна проблема. Альтернативний погляд на проблему Виды светильников
Виды светильников Стол на 38 кувертов.
Стол на 38 кувертов. Расчет радиовещательного приемника высшего класса
Расчет радиовещательного приемника высшего класса Оценка и корректировка сроков технического обслуживания
Оценка и корректировка сроков технического обслуживания Коммуникативная компетентность в профессиональной деятельности психолога
Коммуникативная компетентность в профессиональной деятельности психолога Основы бережливого производства
Основы бережливого производства Влияние мультфильмов на сознание детей
Влияние мультфильмов на сознание детей Mining mishaps (фотографии)
Mining mishaps (фотографии) Процесс плазменно-дугового нанесения покрытий из порошков. Метод плазменного напыления
Процесс плазменно-дугового нанесения покрытий из порошков. Метод плазменного напыления Устройство системного блока. Системы, расположенные на материнской плате ПК
Устройство системного блока. Системы, расположенные на материнской плате ПК Расчетно-графическая работа №1 Определить производительность гусеничного бульдозера
Расчетно-графическая работа №1 Определить производительность гусеничного бульдозера Моделирование и формализация
Моделирование и формализация 20231114_prezentatsiya
20231114_prezentatsiya Религия как элемент духовной культуры
Религия как элемент духовной культуры