- Проектная работа по технологии. Тема: Моделирование квадрокоптера

Содержание
- 2. История Квадрокоптер-это летательный аппарат с четырьмя несущими винтами, вращающимися диагонально противоположных направления.
- 3. Актуальность Объектом исследования являются квадрокоптеры. Предметом исследования являются технология моделирования квадрокоптеров и их практическое применение. Актуальность
- 4. Цель исследования: -изучить различные схемы построения квадрокоптеров -изготовиться и протестировать модель -оценить возможное направления практического применения
- 5. Причина выбора Мой квадрокоптер не большого размера. Не требует больших затрат в плане электричества Летает 15
- 6. Фото моего аппарата
- 7. Принцип действия и устройство 1) ускорить все винты — подъём; 2)ускорить винты с одной стороны и
- 8. Составные части квадрокоптера и процесс сборки Каждый пропеллер квадрокоптера приводится в действие собственным электромотором, питаемым от
- 9. Современные квадрокоптеры используют бесколлекторные электродвигатели и литий-полимерные аккумуляторы в качестве источника энергии. Поднимаемый полезный груз моделями
- 10. Себестоимость С1-прапелеры 4 штуки по 30 руб. 30*4=120 руб. С2-маторры 4 штуки по 100 руб. 100*4=400
- 12. Скачать презентацию

История
Квадрокоптер-это летательный аппарат с четырьмя несущими винтами, вращающимися диагонально противоположных направления.
История
Квадрокоптер-это летательный аппарат с четырьмя несущими винтами, вращающимися диагонально противоположных направления.
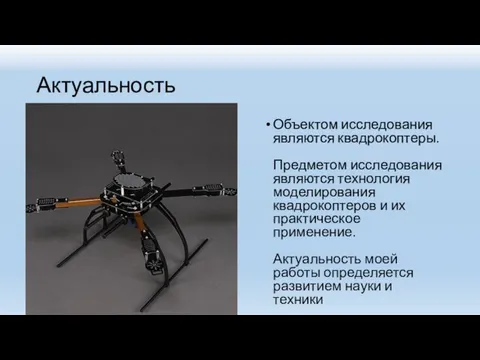
Актуальность
Объектом исследования являются квадрокоптеры.
Предметом исследования являются технология моделирования квадрокоптеров и их
Актуальность
Объектом исследования являются квадрокоптеры. Предметом исследования являются технология моделирования квадрокоптеров и их
Цель исследования:
-изучить различные схемы построения квадрокоптеров
-изготовиться и протестировать модель
-оценить возможное
Цель исследования:
-изучить различные схемы построения квадрокоптеров -изготовиться и протестировать модель -оценить возможное
Причина выбора
Мой квадрокоптер не большого размера.
Не требует больших затрат в плане
Причина выбора
Мой квадрокоптер не большого размера. Не требует больших затрат в плане
Фото моего аппарата
Фото моего аппарата
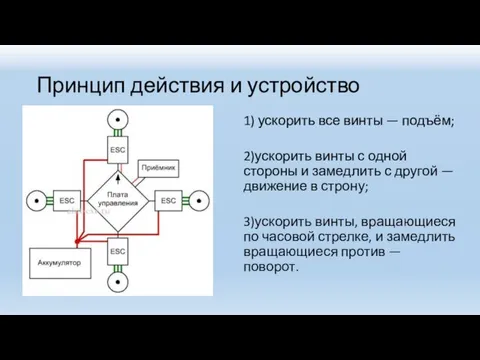
Принцип действия и устройство
1) ускорить все винты — подъём;
2)ускорить винты с
Принцип действия и устройство
1) ускорить все винты — подъём;
2)ускорить винты с
Составные части квадрокоптера и процесс сборки
Каждый пропеллер квадрокоптера приводится в действие
Составные части квадрокоптера и процесс сборки
Каждый пропеллер квадрокоптера приводится в действие
Современные квадрокоптеры используют бесколлекторные электродвигатели и литий-полимерные аккумуляторы в качестве источника
Современные квадрокоптеры используют бесколлекторные электродвигатели и литий-полимерные аккумуляторы в качестве источника
Себестоимость
С1-прапелеры 4 штуки по 30 руб. 30*4=120 руб.
С2-маторры 4 штуки
Себестоимость
С1-прапелеры 4 штуки по 30 руб. 30*4=120 руб. С2-маторры 4 штуки
 Троянский конь
Троянский конь Напівпровідниковий діод
Напівпровідниковий діод Человек в ландшафте
Человек в ландшафте 8 Марта
8 Марта Профилактика агрессивного поведения
Профилактика агрессивного поведения Чудеса света. Колизей
Чудеса света. Колизей Неогнестрельные переломы нижней челюсти. Клиника, диагностика
Неогнестрельные переломы нижней челюсти. Клиника, диагностика монастыри
монастыри Цемент и его производство
Цемент и его производство Динамика системы материальных точек. Лекция 3.0
Динамика системы материальных точек. Лекция 3.0 Родительское собрание первый раз в первый класс
Родительское собрание первый раз в первый класс Смешанные числа. 5 класс
Смешанные числа. 5 класс БезОпасный интернет
БезОпасный интернет Технологическая оснастка
Технологическая оснастка Презентация Герои войны - кто они?
Презентация Герои войны - кто они? Сказка о Весёлом Язычке
Сказка о Весёлом Язычке Сказкотерапия. Работа со сказками
Сказкотерапия. Работа со сказками Механическое оборудование предприятий
Механическое оборудование предприятий Расселение древнейшего человека. Человек разумный
Расселение древнейшего человека. Человек разумный Легенды о короле Артуре: Мифы и Реальность
Легенды о короле Артуре: Мифы и Реальность Предложения РААСН для строительного комплекса и ЖКХ
Предложения РААСН для строительного комплекса и ЖКХ Высокомолекулярные соединения
Высокомолекулярные соединения Симонов Константин Михайлович 28.11.1915 – 28.08.1975
Симонов Константин Михайлович 28.11.1915 – 28.08.1975 Кто где живёт?
Кто где живёт? Урок знаний, посвященный 20-летию Конституции Российской Федерации.
Урок знаний, посвященный 20-летию Конституции Российской Федерации. Педагогический проект
Педагогический проект Выступление на районном конкурсе Учитель года 2004.
Выступление на районном конкурсе Учитель года 2004.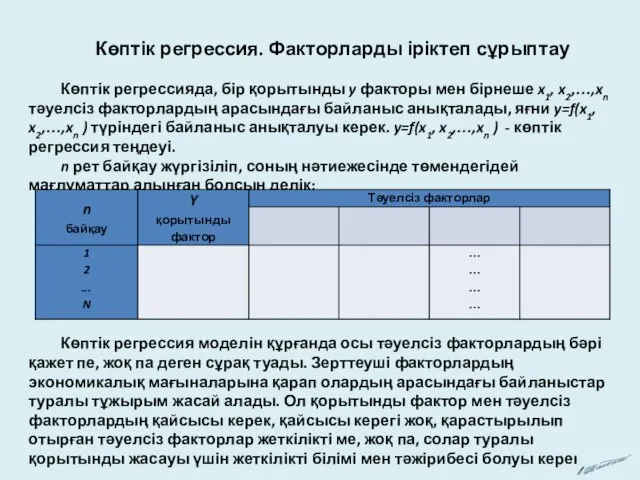 Көптік регрессия. Факторларды іріктеп сұрыптау
Көптік регрессия. Факторларды іріктеп сұрыптау