- Промышленные роботы

Содержание
- 2. Знакомьтесь –РОБОТЫ! Робот- машина с человекоподобным поведением, которая частично или полностью выполняет функции человека при взаимодействии
- 3. Вместо человека. Металлургия Химическая промышленность Микрохирургия Легкая промышленность Горнодобывающая промышленность Сфера обслуживания Атомная промышленность Машиностроение Космос
- 4. Что такое промышленный робот? Промышленный робот (ПР) – автоматическая машина, представляющая собой совокупность манипулятора и перепрограммируемого
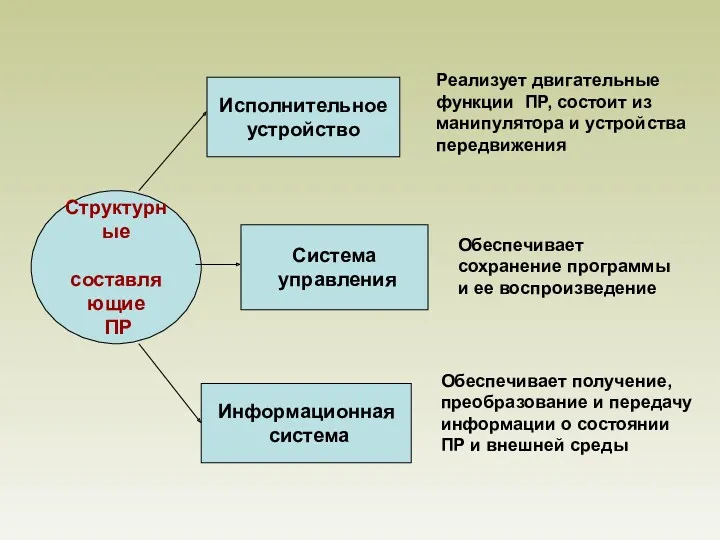
- 5. Структурные составляющие ПР Исполнительное устройство Система управления Информационная система Реализует двигательные функции ПР, состоит из манипулятора
- 6. Основные технические показатели ПР. Назначение Грузоподъемность Число рук Число программируемых координат Тип системы управления Объем памяти
- 7. По конструктивно - технологическому признаку ПР делятся на две группы: ПРОИЗВОДСТВЕННЫЕ ПР – РОБОТЫ, УЧАСТВУЮЩИЕ В
- 9. Скачать презентацию
Знакомьтесь –РОБОТЫ!
Робот- машина с человекоподобным поведением, которая частично или полностью выполняет
Знакомьтесь –РОБОТЫ!
Робот- машина с человекоподобным поведением, которая частично или полностью выполняет

Вместо человека.
Металлургия
Химическая промышленность
Микрохирургия
Легкая промышленность
Горнодобывающая промышленность
Сфера обслуживания
Атомная промышленность
Машиностроение
Космос
Строительная помышленность
Вместо человека.
Металлургия
Химическая промышленность
Микрохирургия
Легкая промышленность
Горнодобывающая промышленность
Сфера обслуживания
Атомная промышленность
Машиностроение
Космос
Строительная помышленность
Что такое промышленный робот?
Промышленный робот (ПР) – автоматическая машина, представляющая собой
Что такое промышленный робот?
Промышленный робот (ПР) – автоматическая машина, представляющая собой
Структурные
составляющие
ПР
Исполнительное
устройство
Система
управления
Информационная
система
Реализует двигательные функции ПР, состоит из
Структурные
составляющие
ПР
Исполнительное
устройство
Система
управления
Информационная
система
Реализует двигательные функции ПР, состоит из
Основные технические показатели ПР.
Назначение
Грузоподъемность
Число рук
Число программируемых координат
Тип системы управления
Объем памяти
Скорость
Основные технические показатели ПР.
Назначение
Грузоподъемность
Число рук
Число программируемых координат
Тип системы управления
Объем памяти
Скорость
По конструктивно - технологическому признаку ПР делятся на две группы:
ПРОИЗВОДСТВЕННЫЕ ПР
По конструктивно - технологическому признаку ПР делятся на две группы:
ПРОИЗВОДСТВЕННЫЕ ПР
 Мышление у больных шизофренией
Мышление у больных шизофренией Презентация к уроку по ОРКиСЭ Совесть. Долг
Презентация к уроку по ОРКиСЭ Совесть. Долг Школьная газета (отдельные страницы)
Школьная газета (отдельные страницы) Игра бадминтон
Игра бадминтон Разработка урока Закон сохранения массы веществ
Разработка урока Закон сохранения массы веществ Автомобильная дорога общего пользования регионального значения Москва - Жуковский (Люберецкий р-н)
Автомобильная дорога общего пользования регионального значения Москва - Жуковский (Люберецкий р-н) Sensors. Обзор сенсоров
Sensors. Обзор сенсоров принципы родительского воспитания
принципы родительского воспитания Виды и принципы работы оргтехники
Виды и принципы работы оргтехники Уход при ангине
Уход при ангине Праздник, посвящённый дню матери в 4 классе.
Праздник, посвящённый дню матери в 4 классе. Способы восстановления деталей и сопряжений
Способы восстановления деталей и сопряжений Химическая связь
Химическая связь Решение задач с помощью дробно-рациональных выражений 8 класс
Решение задач с помощью дробно-рациональных выражений 8 класс Техническое обслуживание железнодорожного пути
Техническое обслуживание железнодорожного пути Интерактивная игра Насекомые
Интерактивная игра Насекомые Презентация Окислительно-восстановительные реакции 8 класс
Презентация Окислительно-восстановительные реакции 8 класс Алкендер
Алкендер Я люблю собак
Я люблю собак Научно-исследовательская работа
Научно-исследовательская работа Организация ЭВМ и систем
Организация ЭВМ и систем Обеспечение безопасности технических систем. Лекция 1
Обеспечение безопасности технических систем. Лекция 1 Стільниковий зв'язок
Стільниковий зв'язок Производство халвы
Производство халвы Способы образования слов
Способы образования слов Инфекционные болезни. Диагностика. Принципы лечения. Лечебно-диагностическая работа
Инфекционные болезни. Диагностика. Принципы лечения. Лечебно-диагностическая работа Неотложная помощь в гинекологии
Неотложная помощь в гинекологии Гжель
Гжель