- Пропорциональное регулирование на примере следования по линии на двух датчиках света

Содержание
- 2. Ранее изученный нами принцип релейного регулирования, предполагал, что устройство управления будет воздействовать на выходные устройства несколькими
- 3. Рассмотрим принцип пропорционального регулирования на примере следования по линии на двух датчиках света. За уставку, как
- 4. Если ошибки нет: err = sensor1 - sensor2 = 0 u = err * 2 =
- 5. Суть пропорционального регулирования: Большая ошибка – сильная реакция на неё Маленькая ошибка – слабая реакция на
- 6. Lego EV3, датчики света подключены к портам 1 и 2. Модель робота – 2D модель Для
- 7. А это - блок диаграмм для робота с двумя датчиками освещенности, написанная на основе принципа пропорционального
- 9. Скачать презентацию
Ранее изученный нами принцип релейного регулирования, предполагал, что устройство управления будет
Ранее изученный нами принцип релейного регулирования, предполагал, что устройство управления будет
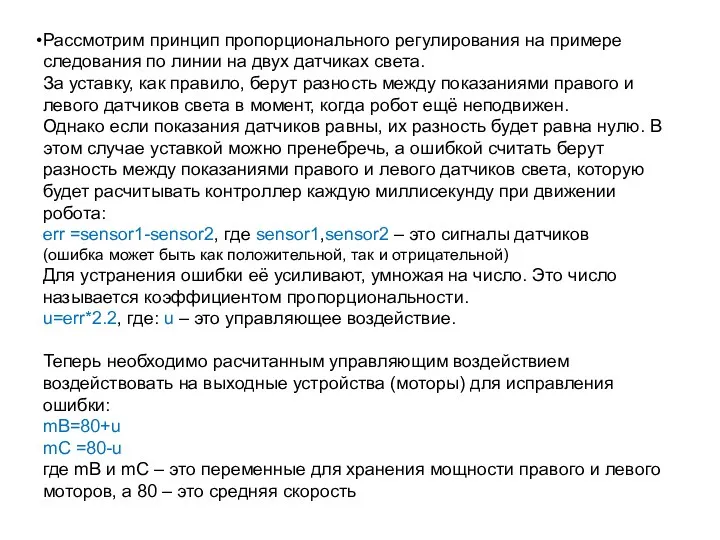
Рассмотрим принцип пропорционального регулирования на примере следования по линии на двух
Рассмотрим принцип пропорционального регулирования на примере следования по линии на двух
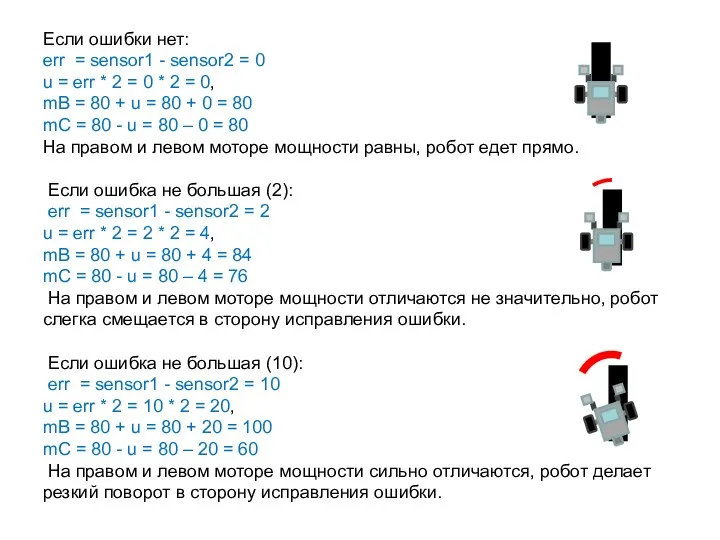
Если ошибки нет:
err = sensor1 - sensor2 = 0
u = err
Если ошибки нет: err = sensor1 - sensor2 = 0 u = err
Суть пропорционального регулирования:
Большая ошибка – сильная реакция на неё
Маленькая ошибка –
Суть пропорционального регулирования: Большая ошибка – сильная реакция на неё Маленькая ошибка –
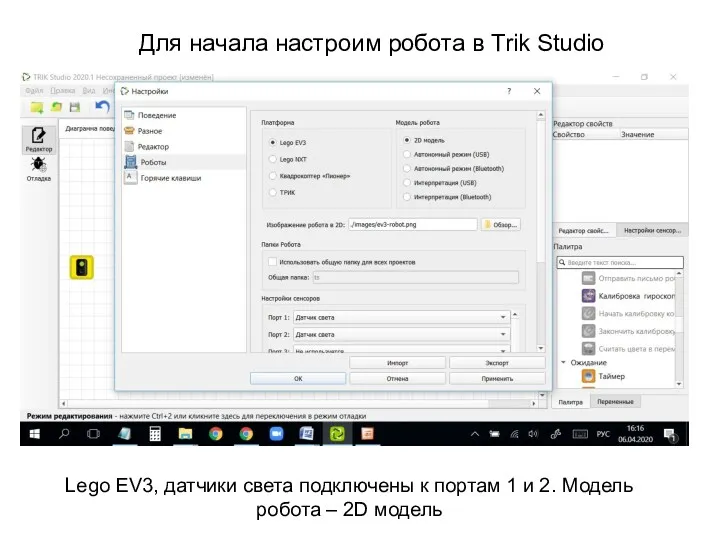
Lego EV3, датчики света подключены к портам 1 и 2. Модель
Lego EV3, датчики света подключены к портам 1 и 2. Модель
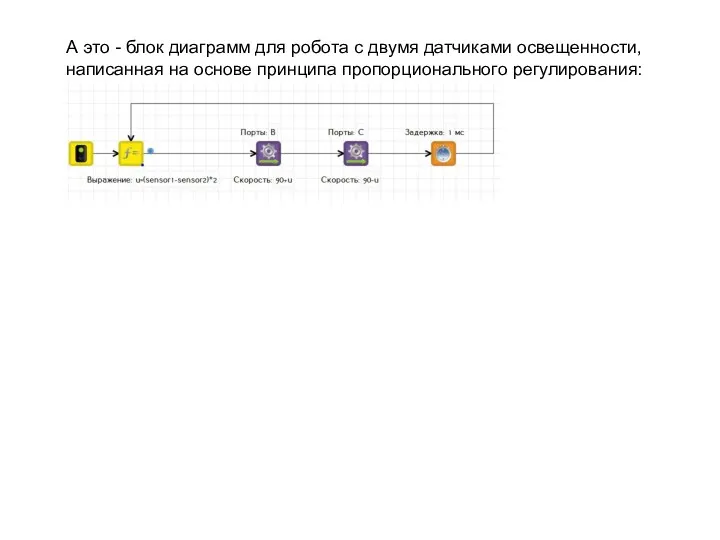
А это - блок диаграмм для робота с двумя датчиками освещенности,
А это - блок диаграмм для робота с двумя датчиками освещенности,
 Справка по исламу
Справка по исламу Масленица
Масленица Содержание духовно-нравственного развития и воспитания ребёнка на ступени дошкольного и начального общего образования Диск
Содержание духовно-нравственного развития и воспитания ребёнка на ступени дошкольного и начального общего образования Диск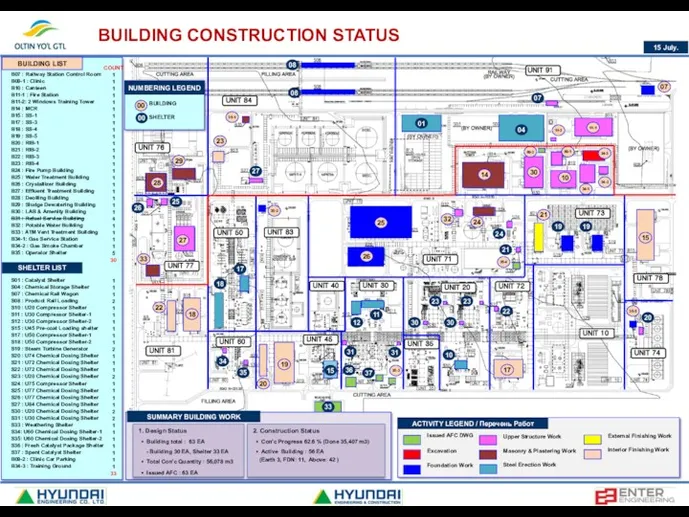 Building Work Status
Building Work Status Шымкент мұнай өңдеу зауыты
Шымкент мұнай өңдеу зауыты Триггеры. RS - триггер,
Триггеры. RS - триггер, Моделирование из бумаги
Моделирование из бумаги Психологический сценарий. Выход из сценария. Предки в моей голове. Занятие 6
Психологический сценарий. Выход из сценария. Предки в моей голове. Занятие 6 17424-ulitsy-goroda-tambova-vosstanovlen.pptx
17424-ulitsy-goroda-tambova-vosstanovlen.pptx Олимпийские игры
Олимпийские игры Игра-презентация Дифференциация д-т
Игра-презентация Дифференциация д-т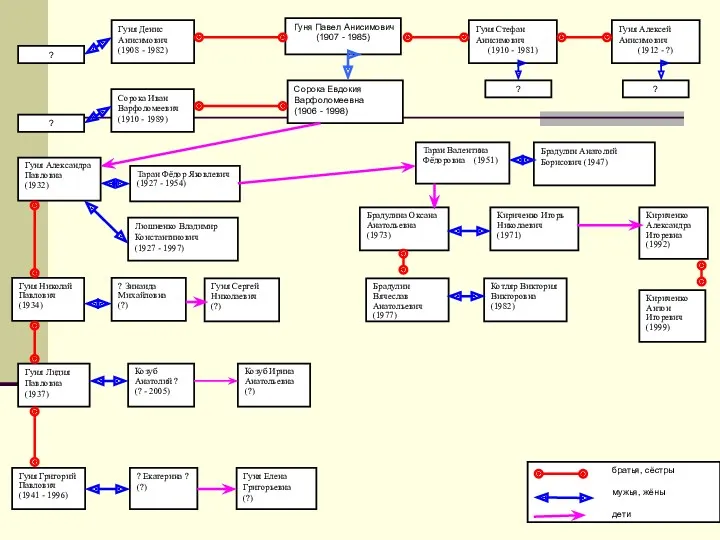 родословная одной семьи я
родословная одной семьи я Пищевые вещества, их источники, роль в структуре питания
Пищевые вещества, их источники, роль в структуре питания Гидравлический пресс
Гидравлический пресс презентация на тему Оздоровительная ходьба
презентация на тему Оздоровительная ходьба Православное паломничество на Святую Землю
Православное паломничество на Святую Землю Методологические основы логопедии
Методологические основы логопедии Өкпенің ошақты туберкулезі
Өкпенің ошақты туберкулезі Инструментальные материалы
Инструментальные материалы Психология конфликтного взаимодействия
Психология конфликтного взаимодействия Әр түрлі маман дәрігерінің кәсіби дефармациясы
Әр түрлі маман дәрігерінің кәсіби дефармациясы Возможности учебных предметов в осознании учащимися ценности здоровья
Возможности учебных предметов в осознании учащимися ценности здоровья Природа Урала
Природа Урала Дефекты соединений при сварке металлов и причины их возникновения
Дефекты соединений при сварке металлов и причины их возникновения Рождественская презентация поэтического клуба Мы пробуем перо.
Рождественская презентация поэтического клуба Мы пробуем перо. Портфолио учителя начальных классов
Портфолио учителя начальных классов Выступление на педагогическом совете Город Толерантности
Выступление на педагогическом совете Город Толерантности Present perfect
Present perfect