- Пропорциональный регулятор. Силовой мотор

Содержание
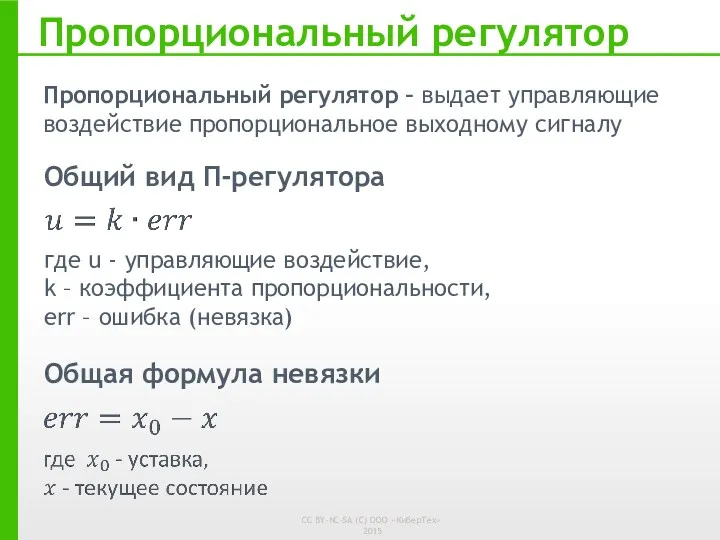
- 2. Пропорциональный регулятор Пропорциональный регулятор – выдает управляющие воздействие пропорциональное выходному сигналу Общий вид П-регулятора где u
- 3. Система управления Объект управления уставка внешние воздействия состояние выходной сигнал Регулятор – система, вырабатывающая с помощью
- 4. Ножка под углом (П-регулятор) Начало Уставка Условие Ошибка Управляющие воздействие Подать мощность на мотор М2 Задача:
- 5. Ножка под углом (П-регулятор) Задача: поставить ножку под углом 90 градусов Модель: силовой мотор с несимметричной
- 7. Скачать презентацию
Пропорциональный регулятор
Пропорциональный регулятор – выдает управляющие воздействие пропорциональное выходному сигналу
Общий вид
Пропорциональный регулятор
Пропорциональный регулятор – выдает управляющие воздействие пропорциональное выходному сигналу
Общий вид
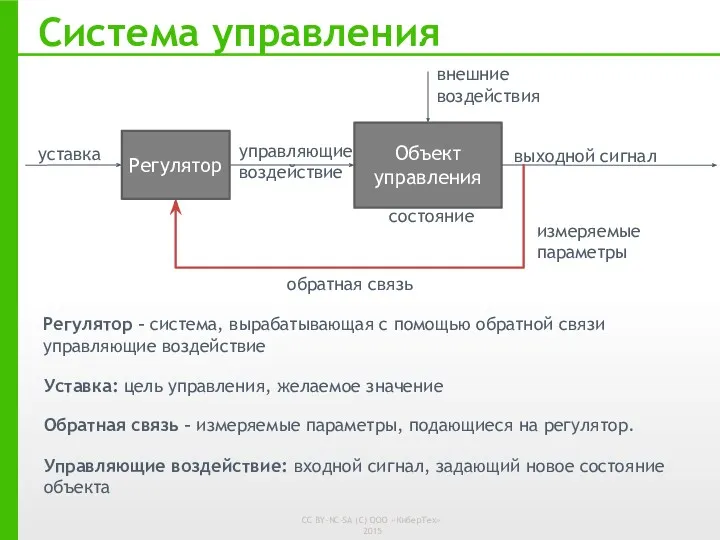
Система управления
Объект управления
уставка
внешние воздействия
состояние
выходной сигнал
Регулятор – система, вырабатывающая с помощью обратной
Система управления
Объект управления
уставка
внешние воздействия
состояние
выходной сигнал
Регулятор – система, вырабатывающая с помощью обратной
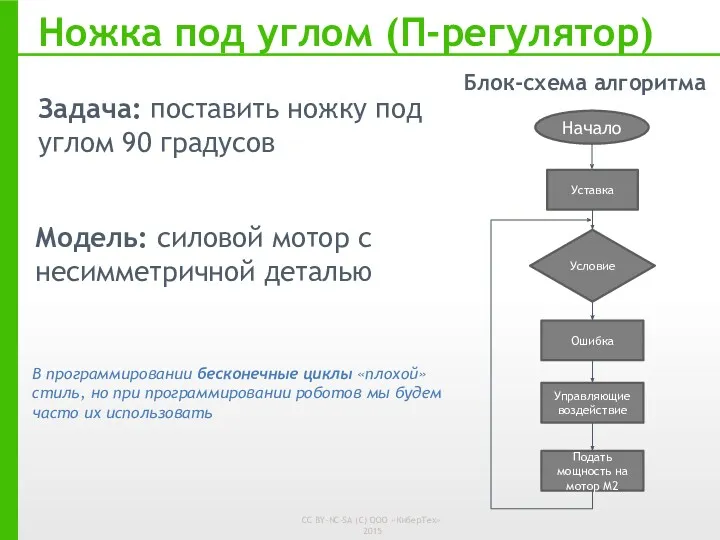
Ножка под углом (П-регулятор)
Начало
Уставка
Условие
Ошибка
Управляющие воздействие
Подать мощность на мотор М2
Задача: поставить ножку
Ножка под углом (П-регулятор)
Начало
Уставка
Условие
Ошибка
Управляющие воздействие
Подать мощность на мотор М2
Задача: поставить ножку
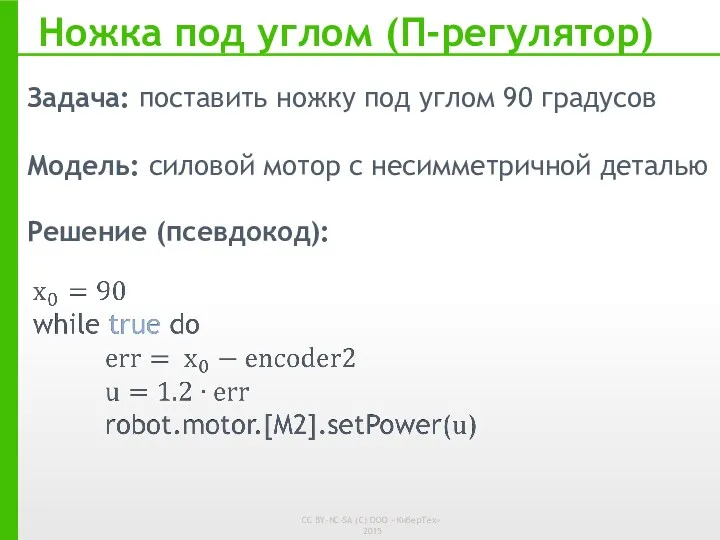
Ножка под углом (П-регулятор)
Задача: поставить ножку под углом 90 градусов
Модель: силовой
Ножка под углом (П-регулятор)
Задача: поставить ножку под углом 90 градусов
Модель: силовой
 Мои любимые произведения
Мои любимые произведения Функциональная анатомия жевательных мышц и дна полости рта
Функциональная анатомия жевательных мышц и дна полости рта Виртуальная экскурсия по городу Славгороду
Виртуальная экскурсия по городу Славгороду Внутренняя политика Николая I
Внутренняя политика Николая I Сергей Александрович Есенин
Сергей Александрович Есенин Технология конструкционных материалов
Технология конструкционных материалов Construction of Reservoir, Sedimentation Tank & Irrigation System at Berry Farms in Uzbekistan
Construction of Reservoir, Sedimentation Tank & Irrigation System at Berry Farms in Uzbekistan Проект Контакт
Проект Контакт Капля бережет море
Капля бережет море Инвестиции и инвестиционные решения
Инвестиции и инвестиционные решения МСР. Южный округ Москвы. Чертаново-Центральное.
МСР. Южный округ Москвы. Чертаново-Центральное. Christina Stürmer
Christina Stürmer ЭХОКГ в пульмонологии
ЭХОКГ в пульмонологии Проект Борьба за чистоту русского языка
Проект Борьба за чистоту русского языка Харківський регіональний центр оцінювання якості освіти
Харківський регіональний центр оцінювання якості освіти ПОРТФОЛИО УЧИТЕЛЯ
ПОРТФОЛИО УЧИТЕЛЯ Уровни параллелизма. Классификации архитектур ВС
Уровни параллелизма. Классификации архитектур ВС История письменности на Руси
История письменности на Руси Игра лазертаг
Игра лазертаг Rio-de-Janeiro República Federativa do Brasil
Rio-de-Janeiro República Federativa do Brasil Агентство креативных решений
Агентство креативных решений Пруды города Димитровграда
Пруды города Димитровграда Что у осени в корзинке. Викторина
Что у осени в корзинке. Викторина Разработка технологического процесса изготовления упаковочной продукции флексографским способом печати
Разработка технологического процесса изготовления упаковочной продукции флексографским способом печати Хозяйство Центрального района
Хозяйство Центрального района Книга Памяти п.ст. Тарасиха, д.Тарасиха Нижегородской области
Книга Памяти п.ст. Тарасиха, д.Тарасиха Нижегородской области Наукометрия и библиометрия
Наукометрия и библиометрия Вычислительные приборы
Вычислительные приборы