- Разработка элементов авиационной системы улучшенного видения

Содержание
- 2. Системы EVS Плохие условия видимости – одна из основных причин авиационных происшествий при заходе ЛА на
- 3. Системы EVS Повышение безопасности пилотирования ЛА на малых высотах – разработка систем «улучшенного видения» (Enhanced Vision
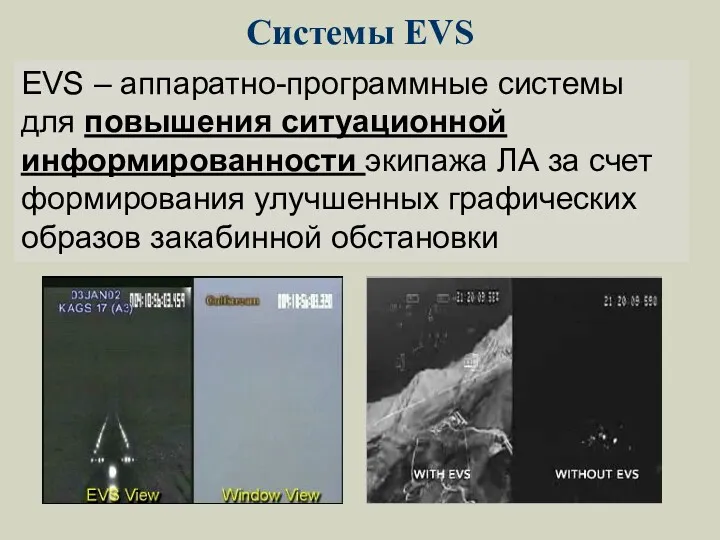
- 4. Системы EVS EVS – аппаратно-программные системы для повышения ситуационной информированности экипажа ЛА за счет формирования улучшенных
- 5. Стандарты на разработку EVS При международной сертификации EVS регулирующие организации руководствуются документом RTCA DO-315 - Minimum
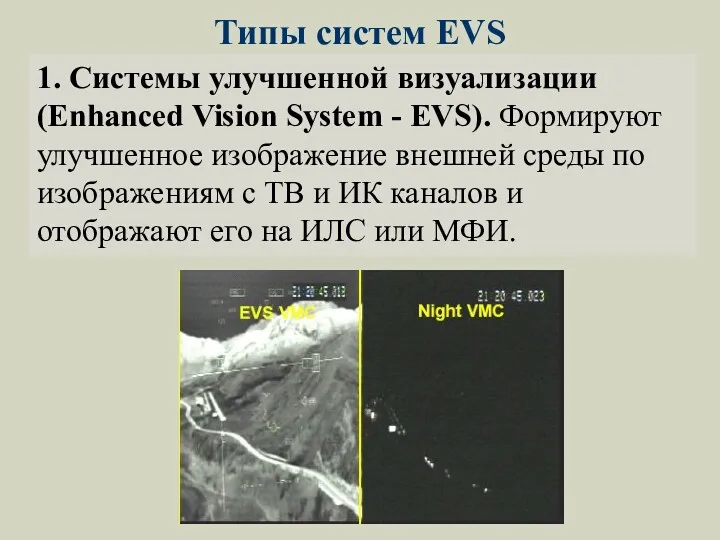
- 6. Типы систем EVS 1. Системы улучшенной визуализации (Enhanced Vision System - EVS). Формируют улучшенное изображение внешней
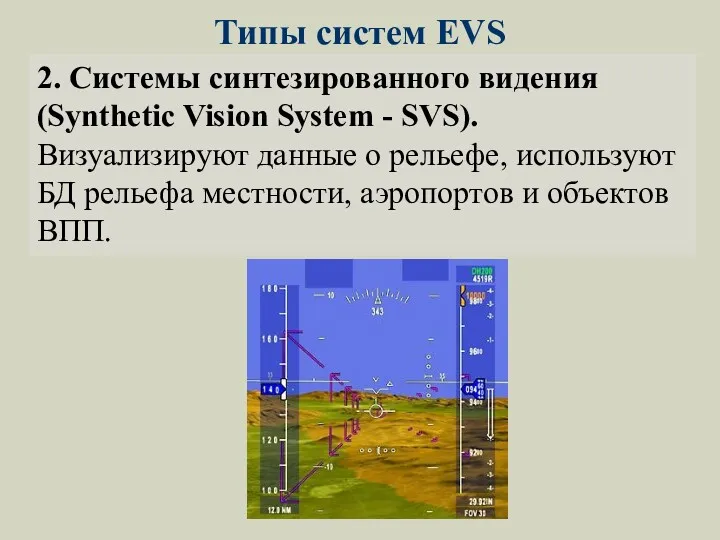
- 7. Типы систем EVS 2. Системы синтезированного видения (Synthetic Vision System - SVS). Визуализируют данные о рельефе,
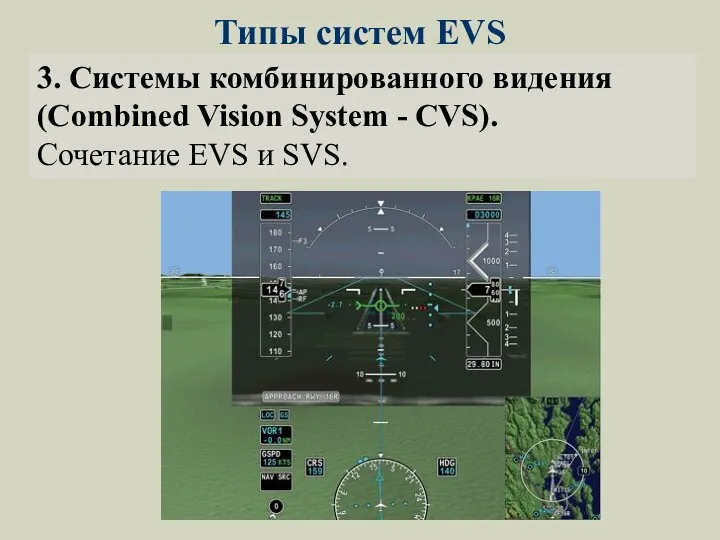
- 8. Типы систем EVS 3. Системы комбинированного видения (Combined Vision System - CVS). Сочетание EVS и SVS.
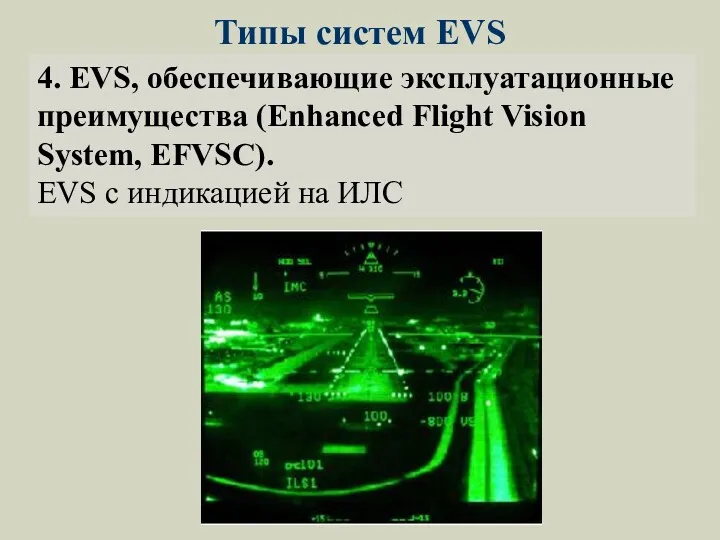
- 9. Типы систем EVS 4. EVS, обеспечивающие эксплуатационные преимущества (Enhanced Flight Vision System, EFVSС). EVS с индикацией
- 10. Коммерческие EVS Лидеры: Rockwell Collins Inc. (США), Thales (Франция), CMC Electronics Inc. (Канада), Max-Viz Inc (США),
- 11. EVS следующего поколения Задача: Создание авиационной системы EVS, существенно превосходящей EVS предыдущего поколения по набору функций
- 12. EVS следующего поколения Функции обработки видеоинформации: улучшение ТВ, ИК1, ИК2 изображений; комплексирование ТВ, ИК1, ИК2 видеоинформации;
- 13. Ключевые моменты разработки EVS Получение экспериментальных регистраций Создание вспомогательного аппаратного и программного обеспечения Компьютерное моделирование Разработка
- 14. Результаты 2010 (по направлениям) Собраны реальные авиационные регистраций ВПП в ТВ диапазоне с записью ПНИ Пример
- 15. Результаты 2010 (по направлениям) Определен общий облик и найдены возможные аппаратные решения для EVS и многоканальной
- 16. Определен общий облик и найдены возможные аппаратные решения для EVS и многоканальной регистрирующей системы в ТВ
- 17. Результаты 2010 (по направлениям) Выработаны рекомендации по размещению датчиков и методике проведения летных экспериментов Размещение датчиков
- 18. Результаты 2010 (по направлениям) Выработаны рекомендации по размещению датчиков и методике проведения летных экспериментов Методика проведения
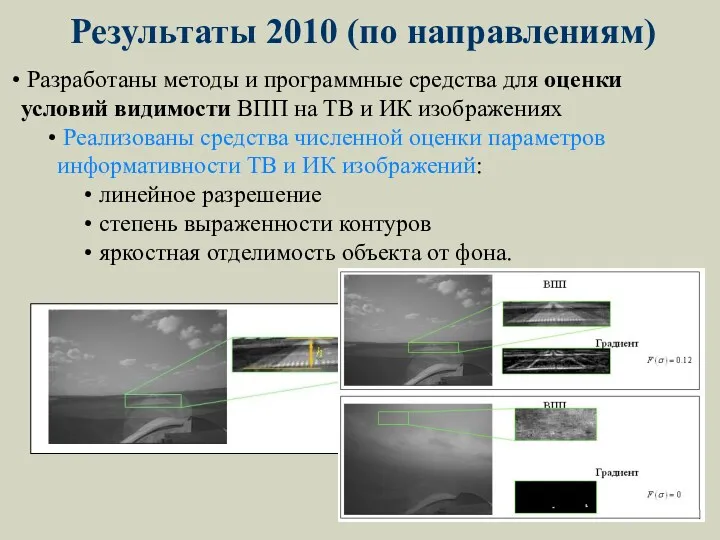
- 19. Результаты 2010 (по направлениям) Разработаны методы и программные средства для оценки условий видимости ВПП на ТВ
- 20. Результаты 2010 (по направлениям) Разработаны методы и программные средства для оценки условий видимости ВПП на ТВ
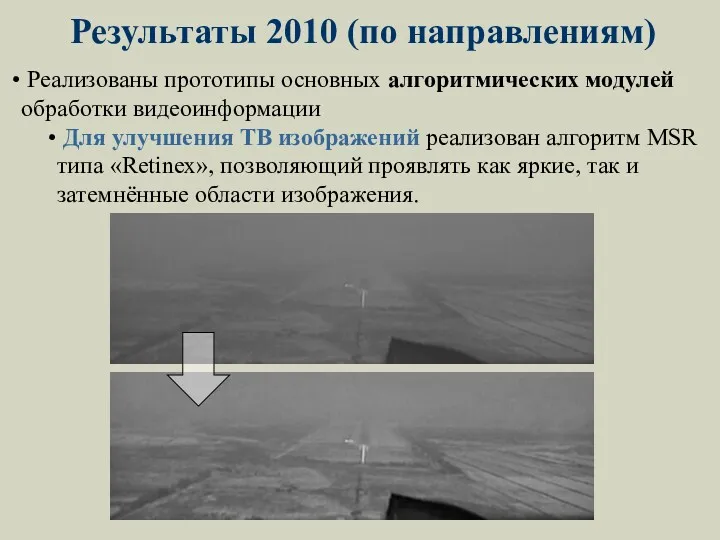
- 21. Результаты 2010 (по направлениям) Реализованы прототипы основных алгоритмических модулей обработки видеоинформации Для улучшения ТВ изображений реализован
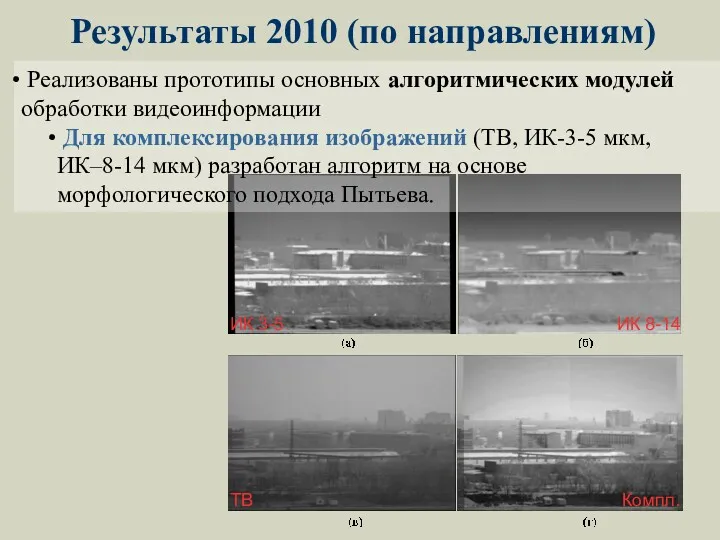
- 22. Результаты 2010 (по направлениям) Реализованы прототипы основных алгоритмических модулей обработки видеоинформации Для комплексирования изображений (ТВ, ИК-3-5
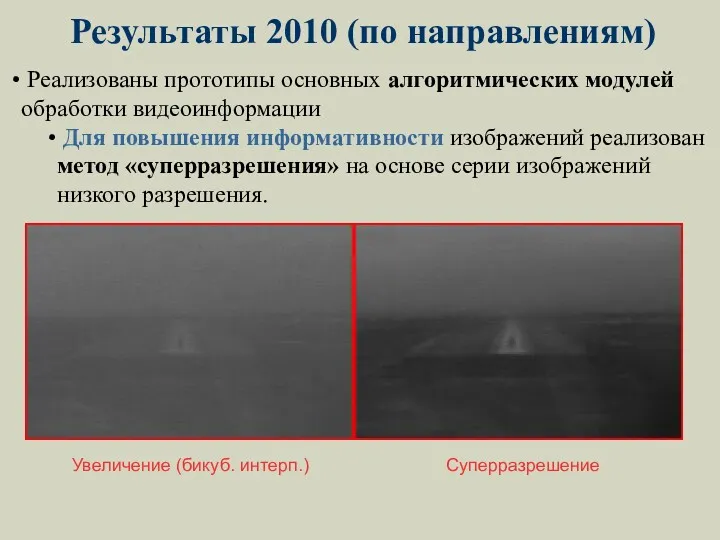
- 23. Результаты 2010 (по направлениям) Реализованы прототипы основных алгоритмических модулей обработки видеоинформации Для повышения информативности изображений реализован
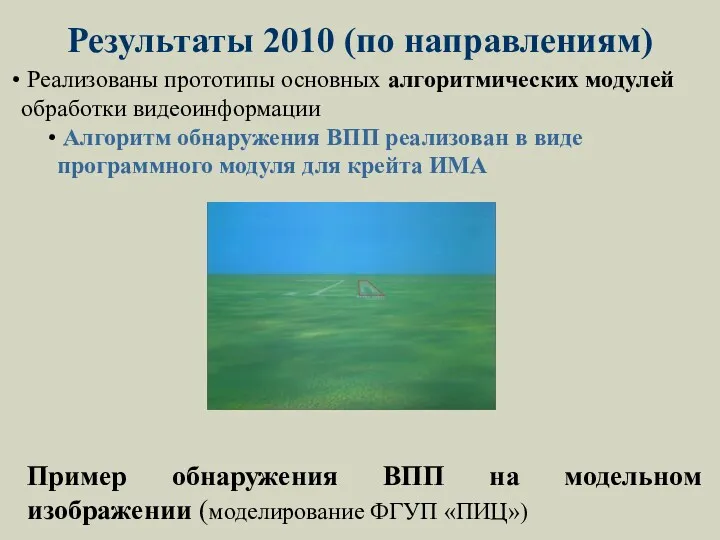
- 24. Результаты 2010 (по направлениям) Реализованы прототипы основных алгоритмических модулей обработки видеоинформации Алгоритм обнаружения ВПП реализован в
- 25. Результаты 2010 (по направлениям) Прототип EVS реализован на базе БУП ИМА и включен в состав демонстрационного
- 26. Результаты 2010 (по направлениям) Прототип EVS реализован на базе БУП ИМА и включен в состав демонстрационного
- 27. Предполагаемые работы 2011 Совершенствование алгоритмов интеллектуальной видеообработки, cравнительное тестирование и комплексирование алгоритмов интеллектуальной видеообработки (ФГУП «ГосНИИАС»,
- 29. Скачать презентацию
Системы EVS
Плохие условия видимости – одна из основных причин авиационных
Системы EVS
Плохие условия видимости – одна из основных причин авиационных
Системы EVS
Повышение безопасности пилотирования ЛА на малых высотах – разработка
Системы EVS
Повышение безопасности пилотирования ЛА на малых высотах – разработка
Системы EVS
EVS – аппаратно-программные системы для повышения ситуационной информированности экипажа
Системы EVS
EVS – аппаратно-программные системы для повышения ситуационной информированности экипажа
Стандарты на разработку EVS
При международной сертификации EVS регулирующие организации
Стандарты на разработку EVS
При международной сертификации EVS регулирующие организации
Типы систем EVS
1. Системы улучшенной визуализации (Enhanced Vision System -
Типы систем EVS
1. Системы улучшенной визуализации (Enhanced Vision System -
Типы систем EVS
2. Системы синтезированного видения (Synthetic Vision System -
Типы систем EVS
2. Системы синтезированного видения (Synthetic Vision System -
Типы систем EVS
3. Системы комбинированного видения (Combined Vision System -
Типы систем EVS
3. Системы комбинированного видения (Combined Vision System -
Типы систем EVS
4. EVS, обеспечивающие эксплуатационные преимущества (Enhanced Flight Vision
Типы систем EVS
4. EVS, обеспечивающие эксплуатационные преимущества (Enhanced Flight Vision

Коммерческие EVS
Лидеры: Rockwell Collins Inc. (США), Thales (Франция), CMC Electronics
Коммерческие EVS
Лидеры: Rockwell Collins Inc. (США), Thales (Франция), CMC Electronics
EVS следующего поколения
Задача: Создание авиационной системы EVS, существенно превосходящей
EVS следующего поколения
Задача: Создание авиационной системы EVS, существенно превосходящей
EVS следующего поколения
Функции обработки видеоинформации:
улучшение ТВ, ИК1, ИК2
EVS следующего поколения
Функции обработки видеоинформации:
улучшение ТВ, ИК1, ИК2
Ключевые моменты разработки EVS
Получение экспериментальных регистраций
Создание вспомогательного
Ключевые моменты разработки EVS
Получение экспериментальных регистраций
Создание вспомогательного

Результаты 2010 (по направлениям)
Собраны реальные авиационные регистраций ВПП в
Результаты 2010 (по направлениям)
Собраны реальные авиационные регистраций ВПП в
Результаты 2010 (по направлениям)
Определен общий облик и найдены возможные
Результаты 2010 (по направлениям)
Определен общий облик и найдены возможные

Определен общий облик и найдены возможные аппаратные решения для EVS
Определен общий облик и найдены возможные аппаратные решения для EVS

Результаты 2010 (по направлениям)
Выработаны рекомендации по размещению датчиков и
Результаты 2010 (по направлениям)
Выработаны рекомендации по размещению датчиков и
Результаты 2010 (по направлениям)
Выработаны рекомендации по размещению датчиков и
Результаты 2010 (по направлениям)
Выработаны рекомендации по размещению датчиков и

Результаты 2010 (по направлениям)
Разработаны методы и программные средства для
Результаты 2010 (по направлениям)
Разработаны методы и программные средства для
Результаты 2010 (по направлениям)
Разработаны методы и программные средства для
Результаты 2010 (по направлениям)
Разработаны методы и программные средства для
Результаты 2010 (по направлениям)
Реализованы прототипы основных алгоритмических модулей обработки
Результаты 2010 (по направлениям)
Реализованы прототипы основных алгоритмических модулей обработки
Результаты 2010 (по направлениям)
Реализованы прототипы основных алгоритмических модулей обработки
Результаты 2010 (по направлениям)
Реализованы прототипы основных алгоритмических модулей обработки
Результаты 2010 (по направлениям)
Реализованы прототипы основных алгоритмических модулей обработки
Результаты 2010 (по направлениям)
Реализованы прототипы основных алгоритмических модулей обработки
Результаты 2010 (по направлениям)
Реализованы прототипы основных алгоритмических модулей обработки
Результаты 2010 (по направлениям)
Реализованы прототипы основных алгоритмических модулей обработки

Результаты 2010 (по направлениям)
Прототип EVS реализован на базе БУП
Результаты 2010 (по направлениям)
Прототип EVS реализован на базе БУП

Результаты 2010 (по направлениям)
Прототип EVS реализован на базе БУП ИМА
Результаты 2010 (по направлениям)
Прототип EVS реализован на базе БУП ИМА
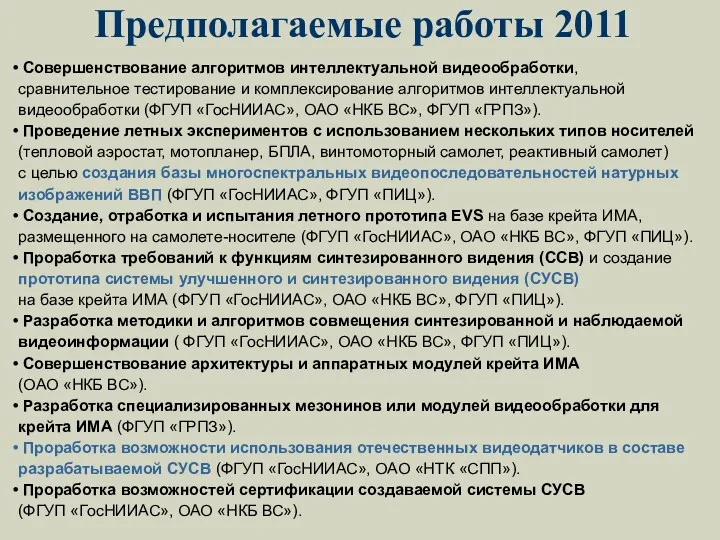
Предполагаемые работы 2011
Совершенствование алгоритмов интеллектуальной видеообработки,
cравнительное тестирование и комплексирование
Предполагаемые работы 2011
Совершенствование алгоритмов интеллектуальной видеообработки, cравнительное тестирование и комплексирование
 Дисграфия
Дисграфия Реформирование психиатрической службы. Опыт США и Европы
Реформирование психиатрической службы. Опыт США и Европы Внутренние устройства ПК
Внутренние устройства ПК урок по теме Механические передачи Конспект занятия
урок по теме Механические передачи Конспект занятия Своя игра по биологии: клетка, размножение организмов, онтогенез, генетика
Своя игра по биологии: клетка, размножение организмов, онтогенез, генетика Стихи на уроках - 5
Стихи на уроках - 5 Методы управления персоналом
Методы управления персоналом Технологический процесс получения штампованной поковки
Технологический процесс получения штампованной поковки Религия. Мировые религии
Религия. Мировые религии Презентация Развивающая среда для мелкой моторики
Презентация Развивающая среда для мелкой моторики Матросов Александр Матвеевич
Матросов Александр Матвеевич Волонтёрское движение Тёплые руки
Волонтёрское движение Тёплые руки Учебная экскурсия Скульптурные произведения искусства на античные темы в Эрмитаже.
Учебная экскурсия Скульптурные произведения искусства на античные темы в Эрмитаже. Психоэмоциональное напряжение как фактор риска соматических заболеваний детей в условиях Арктического региона
Психоэмоциональное напряжение как фактор риска соматических заболеваний детей в условиях Арктического региона Финансовый контроль бюджетной сферы
Финансовый контроль бюджетной сферы Қой шаруашылығы
Қой шаруашылығы Сигналы и их спектры
Сигналы и их спектры Как же нам выполнить Великое Поручение?
Как же нам выполнить Великое Поручение? Окислительно-восстановительные реакции в органической химии
Окислительно-восстановительные реакции в органической химии My favourite food
My favourite food Социальный проект Я хочу быть здоровым
Социальный проект Я хочу быть здоровым Угадай картинку: Acid rain, chop down, conservation of natural resources, drought, dump, emissions, noise pollution/standards
Угадай картинку: Acid rain, chop down, conservation of natural resources, drought, dump, emissions, noise pollution/standards Negative Externalities
Negative Externalities 20231105_prezentatsiya1._zvezdnyy_chas
20231105_prezentatsiya1._zvezdnyy_chas Общие сведения о пожарной безопасности технологических процессов производств
Общие сведения о пожарной безопасности технологических процессов производств Рельеф России
Рельеф России Swot анализ агентства праздников Братья Басковы
Swot анализ агентства праздников Братья Басковы Основа для всего. Понятие и значение Конституции. Основы конституционного строя РФ
Основа для всего. Понятие и значение Конституции. Основы конституционного строя РФ