- Робот вычислитель

Содержание
- 2. ВВЕДЕНИЕ Робототехника – увлекательное занятие в любом возрасте. Конструирование самодельного робота не только увлекательное занятие, но
- 3. АКТУАЛЬНОСТЬ РАБОТЫ Современные роботы созданы для замены человеческого труда, как например роботы-пылесосы, таким образом, человек остаётся
- 4. ЦЕЛЬ РАБОТЫ 1)Создать работа который будет вычислять объём и площадь прямоугольных объектов. 2)Написать программу для нашего
- 5. ИНТЕРЕС К РОБОТОТЕХНИКЕ Я начал заниматься робототехникой в начале Декабря 2016 года. Робототехника очень увлекательна и
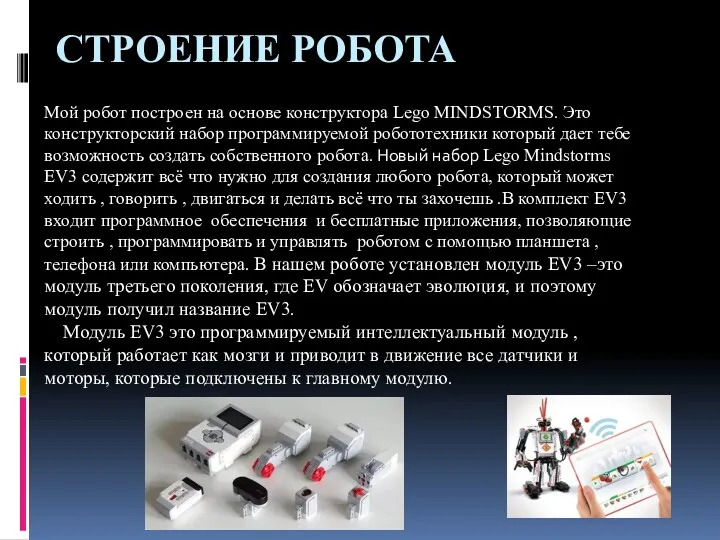
- 6. СТРОЕНИЕ РОБОТА Мой робот построен на основе конструктора Lego MINDSTORMS. Это конструкторский набор программируемой робототехники который
- 7. ГЛАВНЫЕ ДАТЧИКИ В моём роботе используются два основных датчика. Это датчик касания и ультразвуковой датчик.
- 8. ДАТЧИК КАСАНИЯ Датчик касания представляет собой специальную кнопку, которая может находиться в двух состояниях -Нажатия или
- 9. УЛЬТРАЗВУКОВОЙ ДАТЧИК Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или в дюймах. Кроме режимов измерения
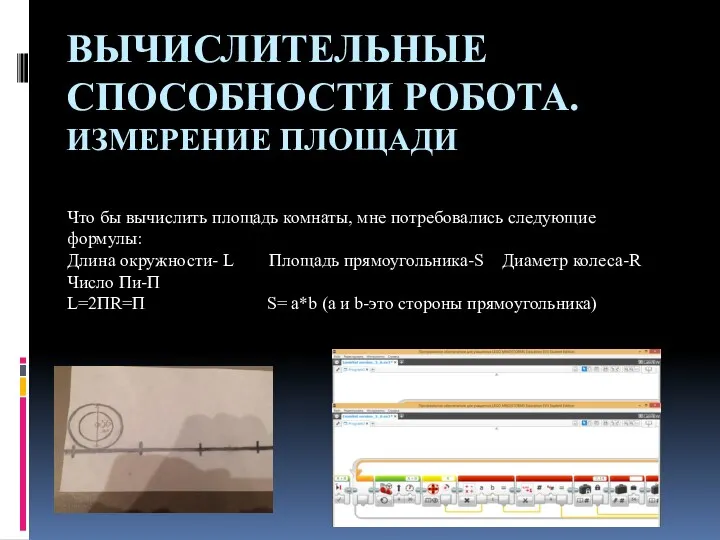
- 10. ВЫЧИСЛИТЕЛЬНЫЕ СПОСОБНОСТИ РОБОТА. ИЗМЕРЕНИЕ ПЛОЩАДИ Что бы вычислить площадь комнаты, мне потребовались следующие формулы: Длина окружности-
- 11. ИЗМЕРЕНИЕ ОБЪЁМА. Для измерения объёма, мне нужны были те же самые формулы, что и измерение площади.
- 12. ДОПОЛНЕНИЯ Наш робот, желательно, должен вычислять длинные дистанции, ведь существует не большая погрешность в несколько сантиметров
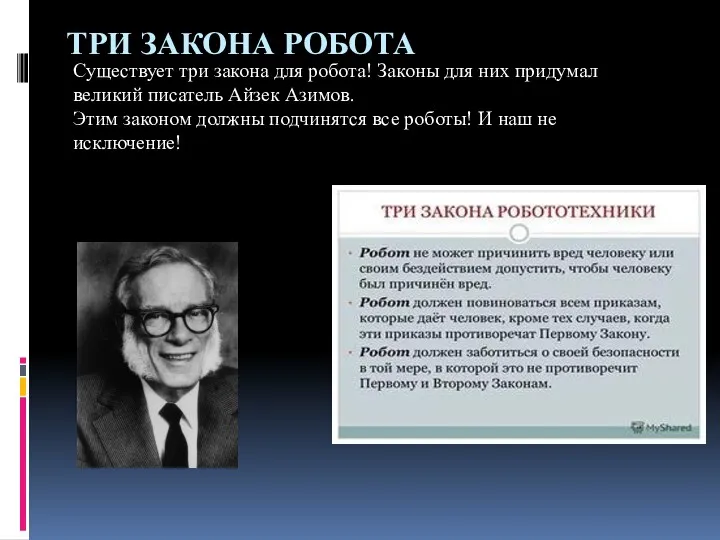
- 13. ТРИ ЗАКОНА РОБОТА Существует три закона для робота! Законы для них придумал великий писатель Айзек Азимов.
- 15. Скачать презентацию

ВВЕДЕНИЕ
Робототехника – увлекательное занятие в любом возрасте. Конструирование
самодельного робота не только
ВВЕДЕНИЕ
Робототехника – увлекательное занятие в любом возрасте. Конструирование
самодельного робота не только

АКТУАЛЬНОСТЬ РАБОТЫ
Современные роботы созданы для замены человеческого труда, как например роботы-пылесосы,
АКТУАЛЬНОСТЬ РАБОТЫ
Современные роботы созданы для замены человеческого труда, как например роботы-пылесосы,
ЦЕЛЬ РАБОТЫ
1)Создать работа который будет вычислять объём и площадь прямоугольных объектов.
2)Написать
ЦЕЛЬ РАБОТЫ
1)Создать работа который будет вычислять объём и площадь прямоугольных объектов. 2)Написать

ИНТЕРЕС К РОБОТОТЕХНИКЕ
Я начал заниматься робототехникой в начале Декабря 2016 года.
ИНТЕРЕС К РОБОТОТЕХНИКЕ
Я начал заниматься робототехникой в начале Декабря 2016 года.
СТРОЕНИЕ РОБОТА
Мой робот построен на основе конструктора Lego MINDSTORMS. Это конструкторский
СТРОЕНИЕ РОБОТА
Мой робот построен на основе конструктора Lego MINDSTORMS. Это конструкторский

ГЛАВНЫЕ ДАТЧИКИ
В моём роботе используются два основных датчика. Это датчик касания
ГЛАВНЫЕ ДАТЧИКИ
В моём роботе используются два основных датчика. Это датчик касания

ДАТЧИК КАСАНИЯ
Датчик касания представляет собой специальную кнопку, которая может находиться в
ДАТЧИК КАСАНИЯ
Датчик касания представляет собой специальную кнопку, которая может находиться в

УЛЬТРАЗВУКОВОЙ ДАТЧИК
Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или
УЛЬТРАЗВУКОВОЙ ДАТЧИК
Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или
ВЫЧИСЛИТЕЛЬНЫЕ СПОСОБНОСТИ РОБОТА.
ИЗМЕРЕНИЕ ПЛОЩАДИ
Что бы вычислить площадь комнаты, мне потребовались следующие
ВЫЧИСЛИТЕЛЬНЫЕ СПОСОБНОСТИ РОБОТА.
ИЗМЕРЕНИЕ ПЛОЩАДИ
Что бы вычислить площадь комнаты, мне потребовались следующие
ИЗМЕРЕНИЕ ОБЪЁМА.
Для измерения объёма, мне нужны были те же самые формулы,
ИЗМЕРЕНИЕ ОБЪЁМА.
Для измерения объёма, мне нужны были те же самые формулы,

ДОПОЛНЕНИЯ
Наш робот, желательно, должен вычислять длинные дистанции, ведь существует не большая
ДОПОЛНЕНИЯ
Наш робот, желательно, должен вычислять длинные дистанции, ведь существует не большая
ТРИ ЗАКОНА РОБОТА
Существует три закона для робота! Законы для них придумал
ТРИ ЗАКОНА РОБОТА
Существует три закона для робота! Законы для них придумал
 English reading
English reading Методы профилактики заболеваний
Методы профилактики заболеваний Жюль Верн
Жюль Верн Тазове передлежання
Тазове передлежання бытовые приборы 5 класс
бытовые приборы 5 класс Стиль команды и подходы к его оценке в судействе заочных соревнований по альпинизму
Стиль команды и подходы к его оценке в судействе заочных соревнований по альпинизму Решение задач. 5 класс
Решение задач. 5 класс Стиль Барокко
Стиль Барокко ЕГЭ. Профильная математика. № 3
ЕГЭ. Профильная математика. № 3 Стенгазета Август
Стенгазета Август Development of Risk Assessment Methodology Against External Hazards for Sodium-Cooled Fast Reactors
Development of Risk Assessment Methodology Against External Hazards for Sodium-Cooled Fast Reactors Развитие фонематического слуха у детей с диагнозом: ТНР. (Методика по развитию фонематического слуха у детей с тяжёлым нарушением речи в детском саду.)
Развитие фонематического слуха у детей с диагнозом: ТНР. (Методика по развитию фонематического слуха у детей с тяжёлым нарушением речи в детском саду.) Сүт бездерінің қабыну аурулары
Сүт бездерінің қабыну аурулары Сальвадор Дали (1904-1989)
Сальвадор Дали (1904-1989) Волга
Волга Расчет технологических показателей разработки круговой нефтяной залежи при ЖВНР работы пласта
Расчет технологических показателей разработки круговой нефтяной залежи при ЖВНР работы пласта Кружок Наши ладошки умеют всё понемножку
Кружок Наши ладошки умеют всё понемножку 《发展汉语(第二版)初级综合(Ⅰ)》第13课+课件
《发展汉语(第二版)初级综合(Ⅰ)》第13课+课件 Марк Твен
Марк Твен конф-2ч
конф-2ч Презентация к уроку по теме Алкены
Презентация к уроку по теме Алкены Мое педагогическое кредо
Мое педагогическое кредо Презентация Здоровьесбережение младших школьников
Презентация Здоровьесбережение младших школьников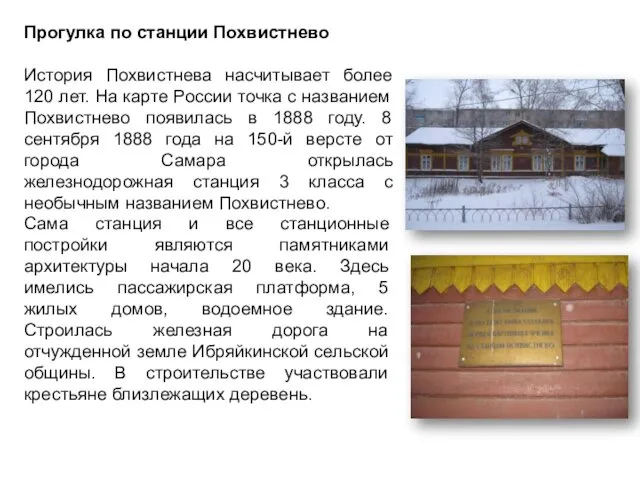 Железнодорожная станция Похвистнево, Самарская область
Железнодорожная станция Похвистнево, Самарская область Ганзейский город Любек
Ганзейский город Любек Материальная культура кыргызов
Материальная культура кыргызов Школьный пресс-центр, создание и развитие
Школьный пресс-центр, создание и развитие 10 真压汁牌 胡萝卜苹果 (中文)
10 真压汁牌 胡萝卜苹果 (中文)