- Робототехника и искусственный интеллект

Содержание
- 2. Робототе́хника (от робот и техника; англ. robotics) — прикладная наука, занимающаяся разработкой автоматизированных технических систем (роботов).
- 3. Виды роботов по грузоподъемности сверхлегкие – до 1 кг.; легкие – до 10 кг.; средние –
- 4. Виды роботов по способу передвижения Колёсный способ — наиболее распространённый способ передвижения, который в зависимости от
- 5. 3 закона робототехники 1)Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был
- 6. Способы контроля По типу управления роботехнические системы подразделяются на: 1. Биотехнические: - командные (кнопочное и рычажное
- 7. Способы контроля 3. Интерактивные: - автоматизированные (возможно чередование автоматических и биотехнических режимов); - супервизорные (автоматические системы,
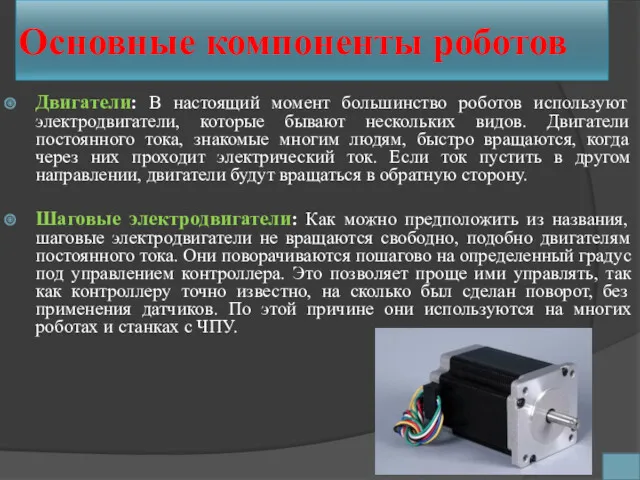
- 8. Основные компоненты роботов Двигатели: В настоящий момент большинство роботов используют электродвигатели, которые бывают нескольких видов. Двигатели
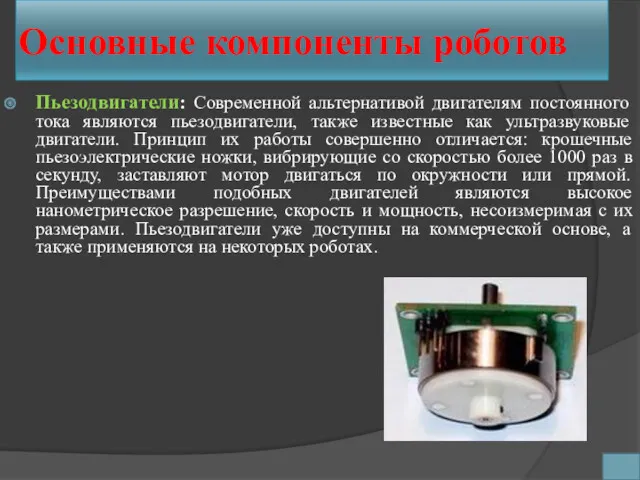
- 9. Основные компоненты роботов Пьезодвигатели: Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также известные как ультразвуковые двигатели.
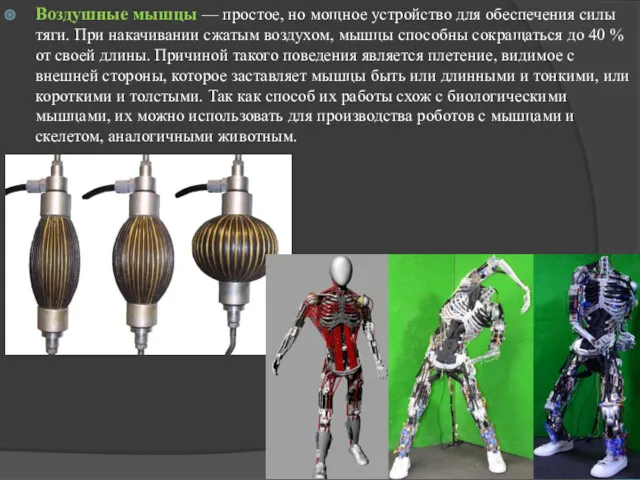
- 10. Воздушные мышцы — простое, но мощное устройство для обеспечения силы тяги. При накачивании сжатым воздухом, мышцы
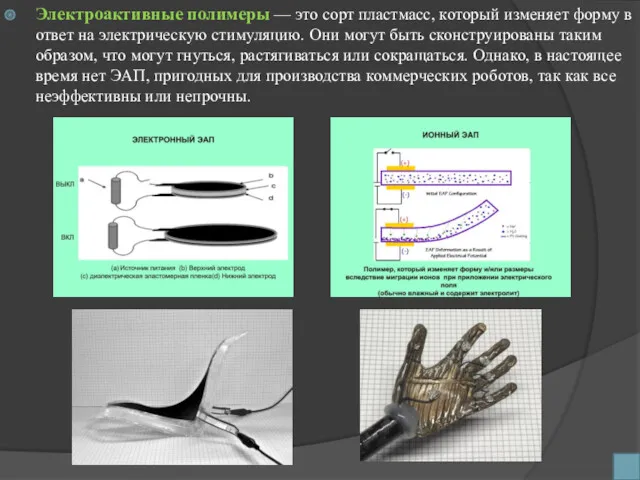
- 11. Электроактивные полимеры — это сорт пластмасс, который изменяет форму в ответ на электрическую стимуляцию. Они могут
- 13. Скачать презентацию

Робототе́хника (от робот и техника; англ. robotics) — прикладная наука, занимающаяся разработкой

Виды роботов по грузоподъемности
сверхлегкие – до 1 кг.;
легкие – до 10
Виды роботов по грузоподъемности
сверхлегкие – до 1 кг.;
легкие – до 10
Виды роботов по способу передвижения
Колёсный способ — наиболее распространённый способ передвижения,
Виды роботов по способу передвижения
Колёсный способ — наиболее распространённый способ передвижения,
3 закона робототехники
1)Робот не может причинить вред человеку или своим бездействием
3 закона робототехники
1)Робот не может причинить вред человеку или своим бездействием
Способы контроля
По типу управления роботехнические системы подразделяются на:
1. Биотехнические:
-
Способы контроля
По типу управления роботехнические системы подразделяются на:
1. Биотехнические:
-
Способы контроля
3. Интерактивные:
- автоматизированные (возможно чередование автоматических и биотехнических режимов);
Способы контроля
3. Интерактивные:
- автоматизированные (возможно чередование автоматических и биотехнических режимов);
Основные компоненты роботов
Двигатели: В настоящий момент большинство роботов используют электродвигатели, которые
Основные компоненты роботов
Двигатели: В настоящий момент большинство роботов используют электродвигатели, которые
Основные компоненты роботов
Пьезодвигатели: Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также
Основные компоненты роботов
Пьезодвигатели: Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также
Воздушные мышцы — простое, но мощное устройство для обеспечения силы тяги. При
Воздушные мышцы — простое, но мощное устройство для обеспечения силы тяги. При
Электроактивные полимеры — это сорт пластмасс, который изменяет форму в ответ на
Электроактивные полимеры — это сорт пластмасс, который изменяет форму в ответ на
 Законодавче забезпечення обліку об’єктів нерухомості
Законодавче забезпечення обліку об’єктів нерухомості Презентация к модулю 3
Презентация к модулю 3 Педагогический проект Развитие творческой активности личности в хореографическом коллективе
Педагогический проект Развитие творческой активности личности в хореографическом коллективе Агропромышленный комплекс России
Агропромышленный комплекс России ДЕНЬ НАРОДНОГО ЕДИНСТВА
ДЕНЬ НАРОДНОГО ЕДИНСТВА Арабский халифат
Арабский халифат Империя Наполеона. Урок 9
Империя Наполеона. Урок 9 Индивидуальные инвестиционные счета: понятие, особенности, налоговые льготы
Индивидуальные инвестиционные счета: понятие, особенности, налоговые льготы Виды дислексии у умственно отсталых школьников
Виды дислексии у умственно отсталых школьников Правила поведения в гостях.
Правила поведения в гостях. Василий Андреевич Жуковский (1783-1852)
Василий Андреевич Жуковский (1783-1852) Жизнь на разных материках
Жизнь на разных материках Социальный туризм. Приозерск - Старая Ладога
Социальный туризм. Приозерск - Старая Ладога Тренды 2018
Тренды 2018 Презентация по теме: Игры и игровые технологии на уроках в коррекционной школе-интернате, применяемые в работе с детьми с ограниченными возможностями здоровья (из опыта работы)..
Презентация по теме: Игры и игровые технологии на уроках в коррекционной школе-интернате, применяемые в работе с детьми с ограниченными возможностями здоровья (из опыта работы).. Великая Отечественная война.
Великая Отечественная война. Назначение судовой котлотурбинной установки
Назначение судовой котлотурбинной установки История башмачной артели в д.Ермолино.Творческий проект учащихся 6 класса.
История башмачной артели в д.Ермолино.Творческий проект учащихся 6 класса. Толерантность.
Толерантность. (ДЛЯ ПЕДАГОГОВ) музыкальные уголки в группах
(ДЛЯ ПЕДАГОГОВ) музыкальные уголки в группах Абсолютное и сравнительное преимущество в международной торговле. Протекционизм. цели и средства. Импортные тарифы
Абсолютное и сравнительное преимущество в международной торговле. Протекционизм. цели и средства. Импортные тарифы Чемпионский Спартак
Чемпионский Спартак Текстильная промышленность
Текстильная промышленность Реновация: понятие и использование в зарубежной градостроительной практике
Реновация: понятие и использование в зарубежной градостроительной практике Презентация Амуляев
Презентация Амуляев Множественное число в английском языке
Множественное число в английском языке Професія – інспектор рибоохоронного патруля
Професія – інспектор рибоохоронного патруля Специальные распределения. χ2 -распределение
Специальные распределения. χ2 -распределение