- Схемотехника систем управления

Содержание
- 2. Тема 1: Специфика применения микропроцессорных средств в системах автоматизации и управления Лекция 1
- 3. Назначение, структура и функционирование цифровых САиУ. Перспективы развития. Специфика применения микро-ЭВМ в системах управления. Общие сведения
- 4. Основные функции интерфейса. Электрическая и конструктивная совместимость. Принципы организации интерфейсов. Линии, шины, магистрали. Классификация интерфейсов САиУ.
- 5. Стробирование и квитирование при передаче данных в САиУ. Режимы обмена информацией в САиУ. Особенности интерфейса с
- 6. Ждущие мультивибраторы. Назначение и применение в устройствах сопряжения. Многофункциональное устройство ввода-вывода. Модуль управления, функциональная схема. Модуль
- 7. Динамический диапазон ЦАП, его разрядность и цена младшего разряда. АЦП. Интерфейс с демультиплексированной шиной адреса и
- 8. Лекция 1 Круговорот информации в системе контроля и управления
- 9. Важным элементом в работе ТС САиУ является организация надежного обмена данными между различными уровнями, в пределах
- 10. Лекция 2 Пример использования некоторых ТС при реализации САиУ Автономная система
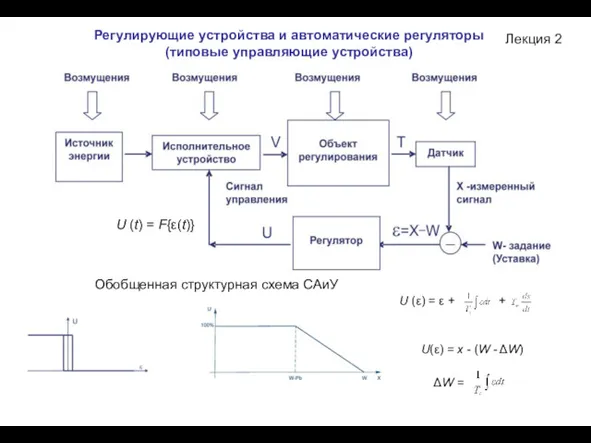
- 11. Лекция 2 Регулирующие устройства и автоматические регуляторы (типовые управляющие устройства) Обобщенная структурная схема САиУ U (t)
- 12. Лекция 3 ТЕМА 2: Общие сведения об интерфейсах Информационные задачи ТС САиУ Функциональные (управляющие) задачи ТС
- 13. Лекция 3 - контроль за основными параметрами; - информирование оператора (по его запросу) о производственной ситуации
- 14. Лекция 3 Измеренные данные о параметрах и состояниях процесса и оборудования передаются в одном направлении и
- 15. Лекция 4 К основным функциональным (управляющим) задачам ТС САиУ относятся: - стабилизация переменных технологического процесса на
- 16. Лекция 4 Программные задачи ТС САиУ Программные задачи ТС САиУ заключаются в разработке программного обеспечения (ПО),
- 17. Лекция 4 Конструктивные задачи ТС САиУ Решение конструктивных задач САиУ является одним из важнейших условий надежной
- 18. Лекция 4 Энергетические задачи ТС САиУ согласованности статистических и динамических параметров электрических сигналов в системе шин
- 19. Лекция 5 ТЕМА 3: Системные интерфейсы однопроцессорных и многопроцессорных устройств - Применение СИ при контроле качества
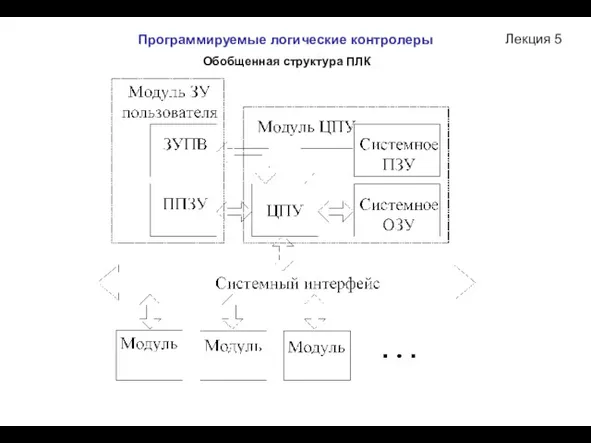
- 20. Лекция 5 Обобщенная структура ПЛК Программируемые логические контролеры
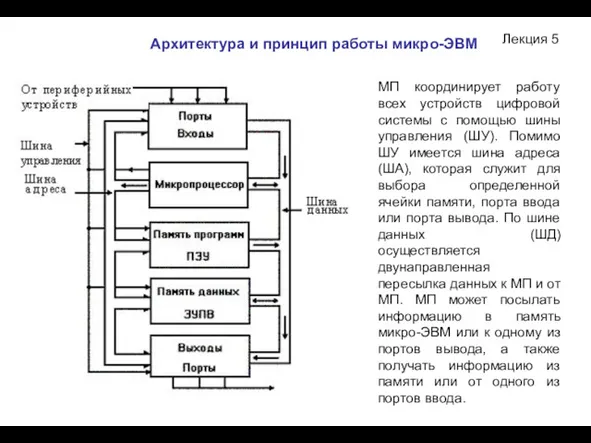
- 21. Лекция 5 Архитектура и принцип работы микро-ЭВМ МП координирует работу всех устройств цифровой системы с помощью
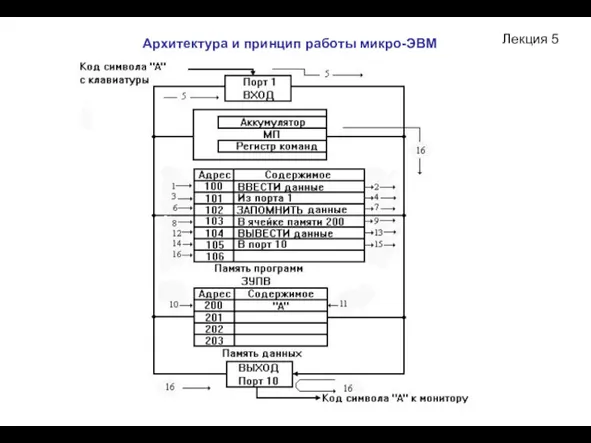
- 22. Лекция 5 Архитектура и принцип работы микро-ЭВМ
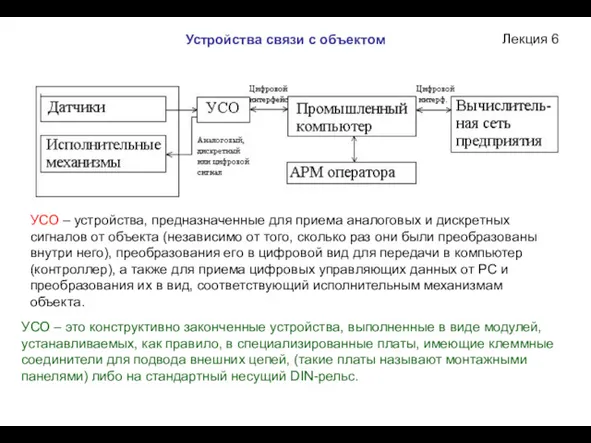
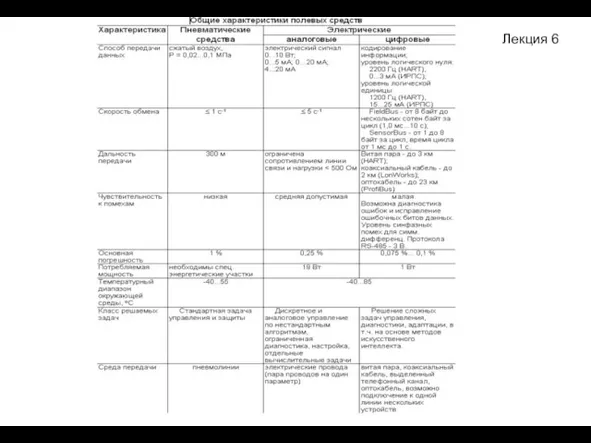
- 23. Лекция 6 Устройства связи с объектом УСО – устройства, предназначенные для приема аналоговых и дискретных сигналов
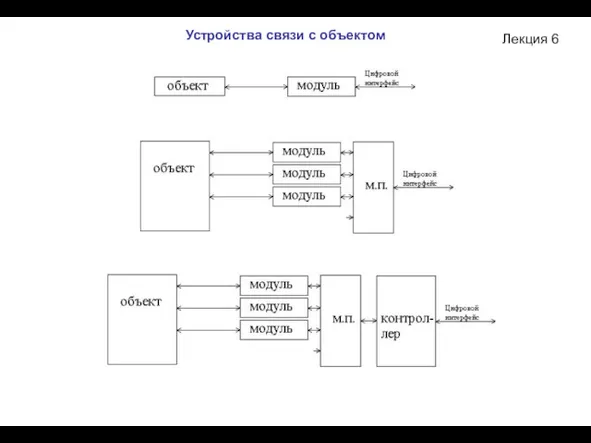
- 24. Лекция 6 Устройства связи с объектом
- 25. Лекция 6
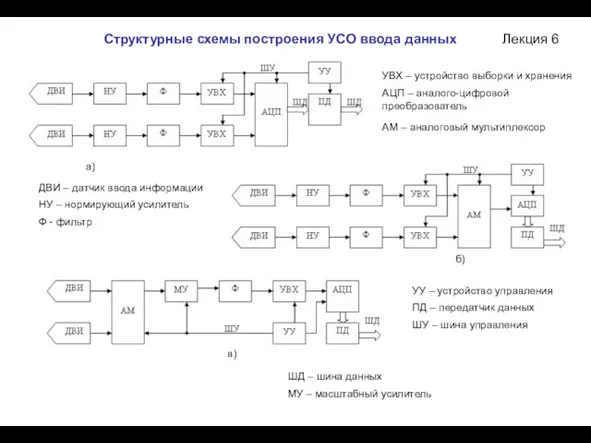
- 26. Лекция 6 а) б) в) Структурные схемы построения УСО ввода данных ДВИ – датчик ввода информации
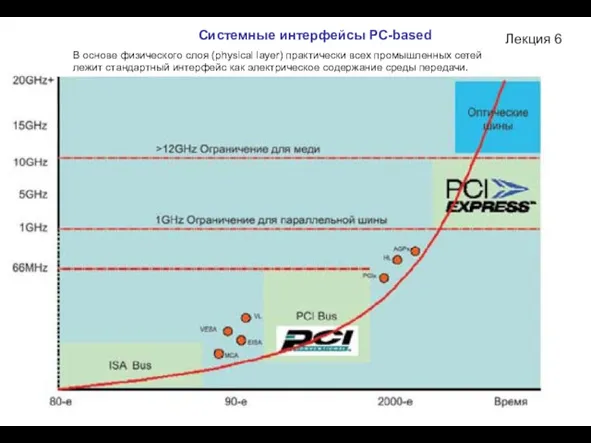
- 27. Лекция 6 Системные интерфейсы РС-based В основе физического слоя (physical layer) практически всех промышленных сетей лежит
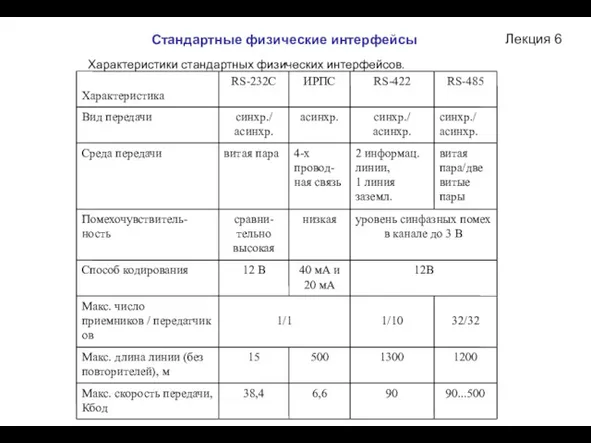
- 28. Лекция 6 Характеристики стандартных физических интерфейсов. Стандартные физические интерфейсы
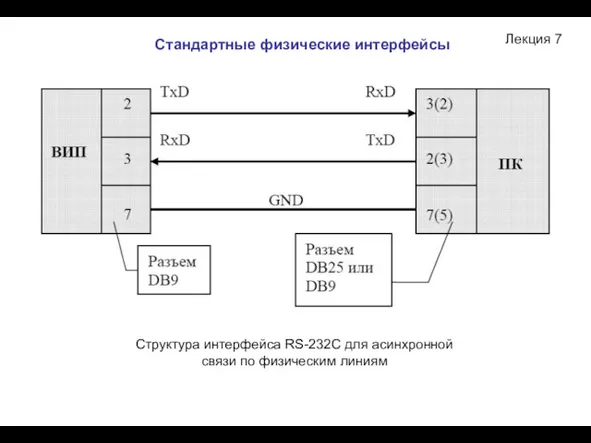
- 29. Лекция 7 Стандартные физические интерфейсы Структура интерфейса RS-232С для асинхронной связи по физическим линиям
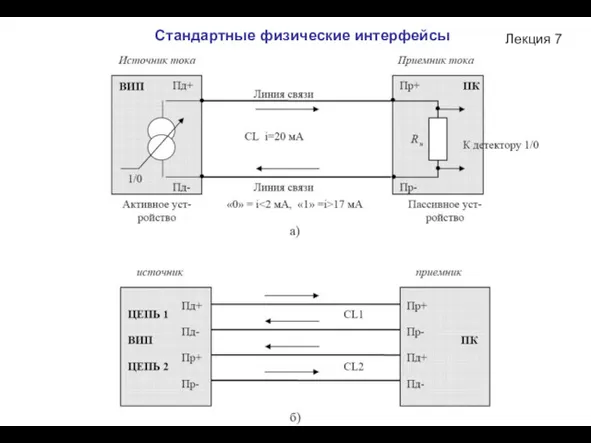
- 30. Лекция 7 Стандартные физические интерфейсы
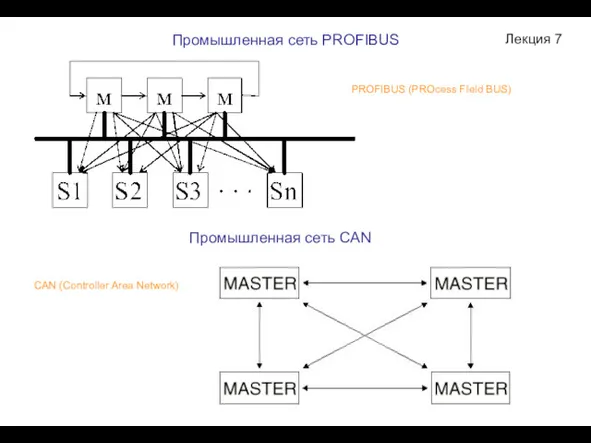
- 31. Лекция 7 Промышленная сеть PROFIBUS Промышленная сеть CAN PROFIBUS (PROcess FIeld BUS) CAN (Controller Area Network)
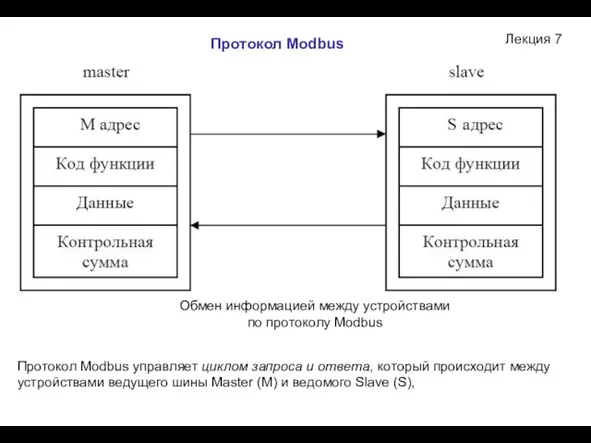
- 32. Лекция 7 Протокол Modbus Обмен информацией между устройствами по протоколу Modbus Протокол Modbus управляет циклом запроса
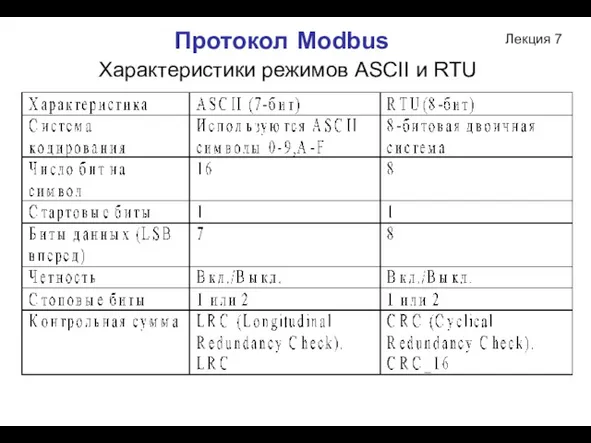
- 33. Лекция 7 Протокол Modbus Характеристики режимов ASCII и RTU
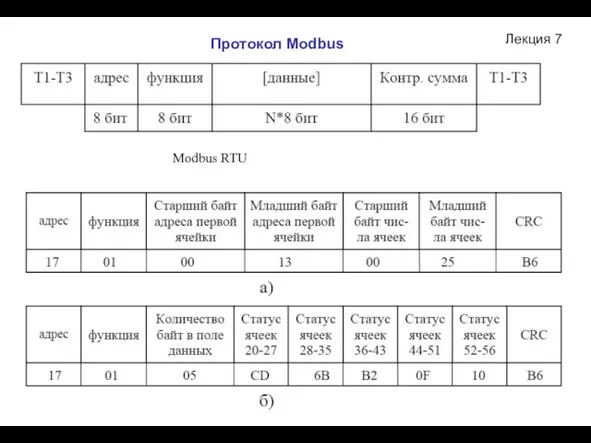
- 34. Лекция 7 Modbus RTU Протокол Modbus
- 35. ТЕМА 4: Принципы преобразования сигнала. ЦАП. АЦП. Лекция 8
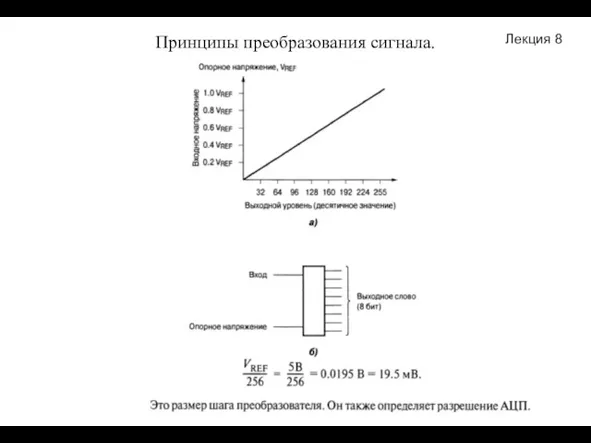
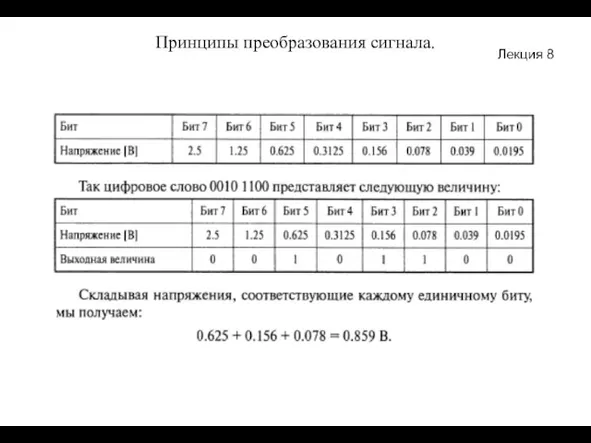
- 36. Принципы преобразования сигнала. Лекция 8
- 37. Принципы преобразования сигнала.
- 38. Следящий АЦП Лекция 9
- 39. АЦП последовательного приближения Лекция 9
- 40. АЦП двойного интегрирования и параллельного типа Лекция 9
- 41. Сравнение типов АЦП Лекция 9
- 42. ТЕМА 5: Методы выбора и расчета основных характеристик систем ввода-вывода Методы выбора и расчета основных ха-рактеристик
- 44. Скачать презентацию

Тема 1: Специфика применения микропроцессорных средств в
системах автоматизации и управления
Лекция
Тема 1: Специфика применения микропроцессорных средств в
системах автоматизации и управления
Лекция
Назначение, структура и функционирование цифровых САиУ. Перспективы развития.
Специфика применения микро-ЭВМ в
Назначение, структура и функционирование цифровых САиУ. Перспективы развития.
Специфика применения микро-ЭВМ в
Основные функции интерфейса. Электрическая и конструктивная совместимость.
Принципы организации интерфейсов. Линии, шины,
Основные функции интерфейса. Электрическая и конструктивная совместимость.
Принципы организации интерфейсов. Линии, шины,
Стробирование и квитирование при передаче данных в САиУ.
Режимы обмена информацией в
Стробирование и квитирование при передаче данных в САиУ.
Режимы обмена информацией в
Ждущие мультивибраторы. Назначение и применение в устройствах сопряжения.
Многофункциональное устройство ввода-вывода. Модуль
Ждущие мультивибраторы. Назначение и применение в устройствах сопряжения.
Многофункциональное устройство ввода-вывода. Модуль
Динамический диапазон ЦАП, его разрядность и цена младшего разряда. АЦП.
Интерфейс с
Динамический диапазон ЦАП, его разрядность и цена младшего разряда. АЦП.
Интерфейс с
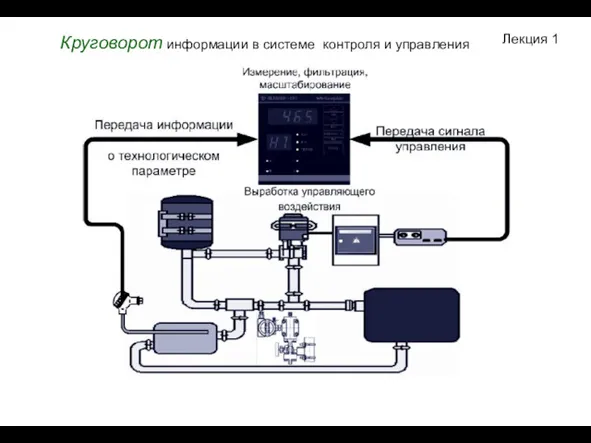
Лекция 1
Круговорот информации в системе контроля и управления
Лекция 1
Круговорот информации в системе контроля и управления
Важным элементом в работе ТС САиУ является организация надежного обмена данными
Важным элементом в работе ТС САиУ является организация надежного обмена данными

Лекция 2
Пример использования некоторых ТС при реализации САиУ
Автономная система
Лекция 2
Пример использования некоторых ТС при реализации САиУ
Автономная система
Лекция 2
Регулирующие устройства и автоматические регуляторы (типовые управляющие устройства)
Обобщенная структурная
Лекция 2
Регулирующие устройства и автоматические регуляторы (типовые управляющие устройства)
Обобщенная структурная
Лекция 3
ТЕМА 2: Общие сведения об интерфейсах
Информационные задачи ТС САиУ
Функциональные (управляющие)
Лекция 3
ТЕМА 2: Общие сведения об интерфейсах
Информационные задачи ТС САиУ
Функциональные (управляющие)

Лекция 3
- контроль за основными параметрами;
- информирование оператора (по его запросу)
Лекция 3
- контроль за основными параметрами;
- информирование оператора (по его запросу)

Лекция 3
Измеренные данные о параметрах и состояниях процесса и оборудования передаются
Лекция 3
Измеренные данные о параметрах и состояниях процесса и оборудования передаются
Лекция 4
К основным функциональным (управляющим) задачам ТС САиУ относятся:
- стабилизация переменных
Лекция 4
К основным функциональным (управляющим) задачам ТС САиУ относятся:
- стабилизация переменных

Лекция 4
Программные задачи ТС САиУ
Программные задачи ТС САиУ заключаются в
Лекция 4
Программные задачи ТС САиУ
Программные задачи ТС САиУ заключаются в

Лекция 4
Конструктивные задачи ТС САиУ
Решение конструктивных задач САиУ является одним
Лекция 4
Конструктивные задачи ТС САиУ
Решение конструктивных задач САиУ является одним

Лекция 4
Энергетические задачи ТС САиУ
согласованности статистических и динамических параметров электрических
Лекция 4
Энергетические задачи ТС САиУ
согласованности статистических и динамических параметров электрических
Лекция 5
ТЕМА 3: Системные интерфейсы однопроцессорных и многопроцессорных устройств
- Применение СИ
Лекция 5
ТЕМА 3: Системные интерфейсы однопроцессорных и многопроцессорных устройств
- Применение СИ
Лекция 5
Обобщенная структура ПЛК
Программируемые логические контролеры
Лекция 5
Обобщенная структура ПЛК
Программируемые логические контролеры
Лекция 5
Архитектура и принцип работы микро-ЭВМ
МП координирует работу всех устройств
Лекция 5
Архитектура и принцип работы микро-ЭВМ
МП координирует работу всех устройств
Лекция 5
Архитектура и принцип работы микро-ЭВМ
Лекция 5
Архитектура и принцип работы микро-ЭВМ
Лекция 6
Устройства связи с объектом
УСО – устройства, предназначенные для приема
Лекция 6
Устройства связи с объектом
УСО – устройства, предназначенные для приема
Лекция 6
Устройства связи с объектом
Лекция 6
Устройства связи с объектом
Лекция 6
Лекция 6
Лекция 6
а)
б)
в)
Структурные схемы построения УСО ввода данных
ДВИ – датчик ввода информации
НУ
Лекция 6
а)
б)
в)
Структурные схемы построения УСО ввода данных
ДВИ – датчик ввода информации
НУ
Лекция 6
Системные интерфейсы РС-based
В основе физического слоя (physical layer) практически
Лекция 6
Системные интерфейсы РС-based
В основе физического слоя (physical layer) практически
Лекция 6
Характеристики стандартных физических интерфейсов.
Стандартные физические интерфейсы
Лекция 6
Характеристики стандартных физических интерфейсов.
Стандартные физические интерфейсы
Лекция 7
Стандартные физические интерфейсы
Структура интерфейса RS-232С для асинхронной
связи по
Лекция 7
Стандартные физические интерфейсы
Структура интерфейса RS-232С для асинхронной
связи по
Лекция 7
Стандартные физические интерфейсы
Лекция 7
Стандартные физические интерфейсы
Лекция 7
Промышленная сеть PROFIBUS
Промышленная сеть CAN
PROFIBUS (PROcess FIeld BUS)
CAN
Лекция 7
Промышленная сеть PROFIBUS
Промышленная сеть CAN
PROFIBUS (PROcess FIeld BUS)
CAN
Лекция 7
Протокол Modbus
Обмен информацией между устройствами
по протоколу Modbus
Протокол Modbus
Лекция 7
Протокол Modbus
Обмен информацией между устройствами
по протоколу Modbus
Протокол Modbus
Лекция 7
Протокол Modbus
Характеристики режимов ASCII и RTU
Лекция 7
Протокол Modbus
Характеристики режимов ASCII и RTU
Лекция 7
Modbus RTU
Протокол Modbus
Лекция 7
Modbus RTU
Протокол Modbus
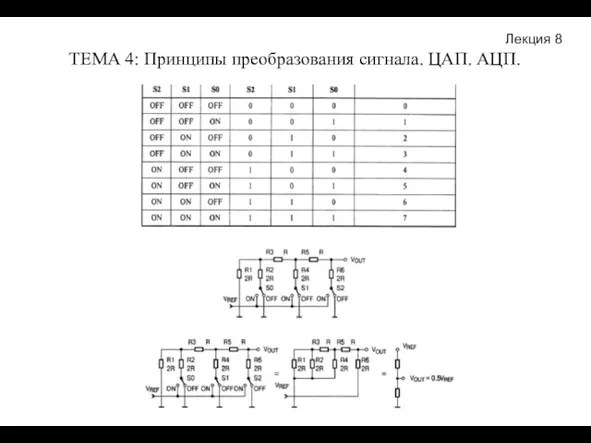
ТЕМА 4: Принципы преобразования сигнала. ЦАП. АЦП.
Лекция 8
ТЕМА 4: Принципы преобразования сигнала. ЦАП. АЦП.
Лекция 8
Принципы преобразования сигнала.
Лекция 8
Принципы преобразования сигнала.
Лекция 8
Принципы преобразования сигнала.
Принципы преобразования сигнала.
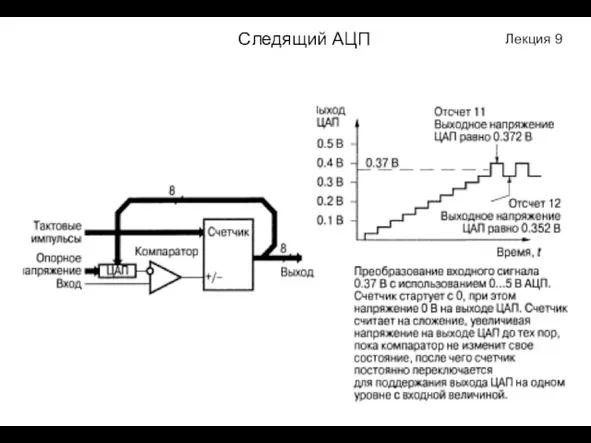
Следящий АЦП
Лекция 9
Следящий АЦП
Лекция 9
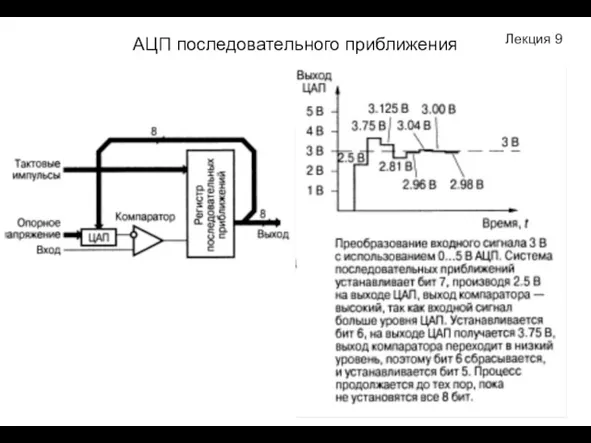
АЦП последовательного приближения
Лекция 9
АЦП последовательного приближения
Лекция 9
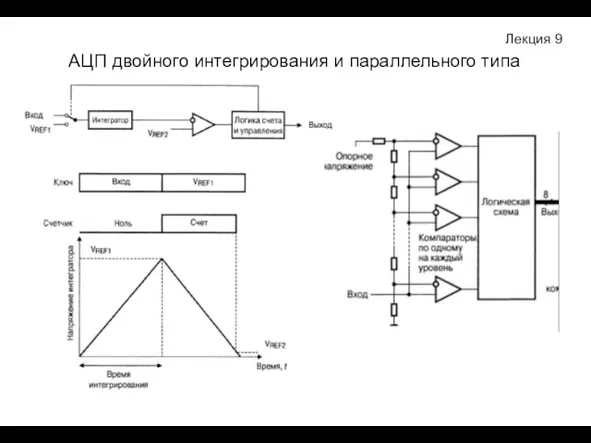
АЦП двойного интегрирования и параллельного типа
Лекция 9
АЦП двойного интегрирования и параллельного типа
Лекция 9
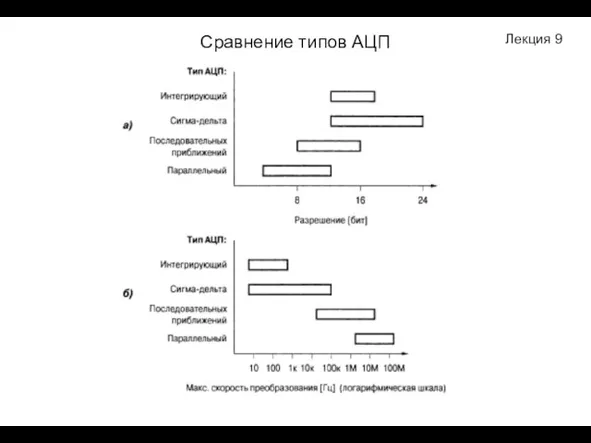
Сравнение типов АЦП
Лекция 9
Сравнение типов АЦП
Лекция 9
ТЕМА 5: Методы выбора и расчета основных характеристик систем ввода-вывода
Методы выбора
ТЕМА 5: Методы выбора и расчета основных характеристик систем ввода-вывода
Методы выбора
 Здравствуй дорогой дьюг
Здравствуй дорогой дьюг Дидактические игры с использованием ИКТ для индивидуальной и подгрупповой работы с детьми дошкольного возраста
Дидактические игры с использованием ИКТ для индивидуальной и подгрупповой работы с детьми дошкольного возраста Аналого-цифровые преобразователи. Метрология и теория измерений. Лекция 18
Аналого-цифровые преобразователи. Метрология и теория измерений. Лекция 18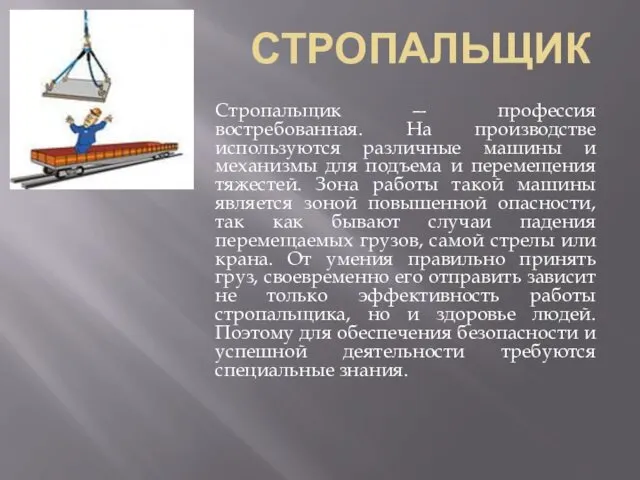 Профессия стропальщик
Профессия стропальщик Единый государственный экзамен по русскому языку
Единый государственный экзамен по русскому языку Таможенные органы как органы дознания
Таможенные органы как органы дознания много функциональная игрушка
много функциональная игрушка ЕГЭ-2019. Русский язык. Задание № 27. Сочинение. Рекомендации
ЕГЭ-2019. Русский язык. Задание № 27. Сочинение. Рекомендации Инструкции VBA
Инструкции VBA До дня вшанування Небесної сотні
До дня вшанування Небесної сотні Милосердие и сострадание
Милосердие и сострадание Омонимы разработка урока по татарскому языку.
Омонимы разработка урока по татарскому языку. С днем рождения
С днем рождения Фитнес
Фитнес The Geography of UK and Its Political Outlook
The Geography of UK and Its Political Outlook Методы и средства профилактики заболеваний пародонта
Методы и средства профилактики заболеваний пародонта презентация по нижегородскому краеведению
презентация по нижегородскому краеведению Почему радуга разноцветная?
Почему радуга разноцветная? Экспертиза промышленной безопасности, техническое диагностирование, оценка технического состояния объектов газораспределения
Экспертиза промышленной безопасности, техническое диагностирование, оценка технического состояния объектов газораспределения Первые уроки школьной отметки
Первые уроки школьной отметки Презентация Упаковка подарков
Презентация Упаковка подарков Тренажёр Пишу правильно
Тренажёр Пишу правильно Классическая школа управления. Школа научного менеджмента. Административная школа управления
Классическая школа управления. Школа научного менеджмента. Административная школа управления Минералы кобальта
Минералы кобальта Танцы в моей жизни. Разновидности направлений танцев
Танцы в моей жизни. Разновидности направлений танцев Создание декоративного водоема
Создание декоративного водоема Социально- коммуникативное развитие
Социально- коммуникативное развитие Жесты народов мира
Жесты народов мира