- Система управления химико-технологическими процессами

Содержание
- 2. Содержание дисциплины Лекции Основы теории автоматического измерения Технические средства измерения температуры, расхода, уровня, давления Практические занятия
- 3. Содержание лекции Основы теории автоматического измерения Основы теории автоматического измерения Классификация систем регулирования. Одноконтурные АСР. Комбинированные
- 4. Основы теории автоматического измерения
- 5. Понятие системы управления Система - совокупность (соединение) взаимосвязанных и взаимодействующих элементов, объединенных с определенной целью. Элемент
- 6. Основные понятия Технологический процесс (ТП) – это совокупность технологических операций, проводимых над исходным сырьем в одном
- 7. Переменные, характеризующие технологический процесс Выходные (Y) – переменные, характеризующие состояние объекта. Эти переменные в процессе регулирования
- 8. Понятие и виды обратной связи а) разомкнутая система управления б) замкнутая система управления отрицательная обратная связь
- 9. Основные принципы управления В теории автоматического управления при проектировании систем управления используются три фундаментальных принципа управления:
- 10. Классификация систем регулирования
- 11. По количеству контуров Одноконтурные Классификация по количеству контуров Многоконтурные Комбинированные Каскадные
- 12. По алгоритму функционирования Системы стабилизации Системы программного управления Системы слежения системы оптимального управления системы телеуправления другие
- 13. Классификация по числу управляемых величин Одномерные Многомерные Несвязанного управления Связанного управления Зависимые Независимые
- 14. Классификация по характеру используемых для управления сигналов Аналоговые (непрерывные) Дискретные (прерывистые) Релейные Цифровые Импульсные Амплитудно-импульсная модуляция
- 15. Классификация по характеру математических соотношений, описывающих систему Линейные Нелинейные Классификация по виду используемой энергии Прямого действия
- 16. Классификация по характеру изменений параметров системы Стационарные Нестационарные Классификация по типу ошибки в системах автоматического управления
- 17. Классификация по характеру внешних воздействий детерминированные стохастические Классификация по способу использования текущей информации неадаптивные Адаптивные Робастые
- 18. Одноконтурные и многоконтурные системы регулирования а) Одноконтурная система регулирования б) Комбинированная система регулирования в) Каскадная система
- 19. Свойства элементов автоматической системы регулирования СТАТИЧЕСКИЕ характеристики указывают на зависимость между входными и выходными переменными в
- 20. ПЕРЕДАТОЧНОЙ функцией называется отношение преобразования по Лапласу выходной координаты к входной: W(p)=Y(p)/X(p) Структурно обозначается: Понятие о
- 21. Последовательное соединение Последовательное соединение: Формула: Подставляя в последнее выражение Xn получаем: При последовательном соединении звеньев их
- 22. Параллельное соединение Параллельное соединение: Выходные сигналы каждого звена: Общий выходной сигнал: или: При параллельном соединении звеньев
- 23. Передаточная функция с отрицательной обратной связью: Передаточная функция с положительной обратной связью: Передаточная функция системы с
- 24. Законы регулирования: Позиционные законы регулирования; Пропорциональное регулирование; Интегральное регулирование; Дифференциальное регулирование; Изодромное регулирование. Основные законы регулирования
- 25. П-регуляторы могут применяться для управления объектами с самовыравниванием и без самовыравнивания при небольших изменениях нагрузок, если
- 26. Анализ систем управления Устойчивость – система должна оставаться устойчивой на всех режимах, не должна идти «вразнос»;
- 27. Устойчивость систем управления Устойчивость – способность динамических систем возвращаться в исходное установившееся состояние после снятия внешних
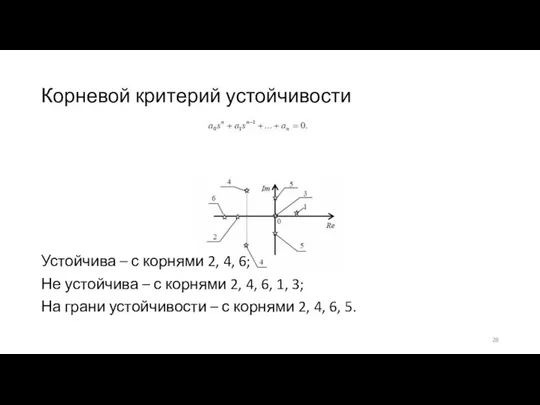
- 28. Корневой критерий устойчивости Устойчива – с корнями 2, 4, 6; Не устойчива – с корнями 2,
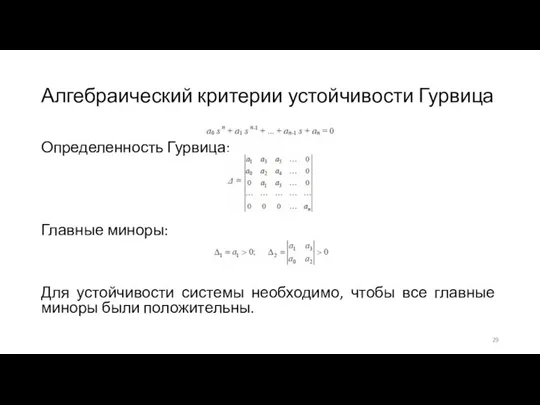
- 29. Алгебраический критерии устойчивости Гурвица Определенность Гурвица: Главные миноры: Для устойчивости системы необходимо, чтобы все главные миноры
- 31. Скачать презентацию
Содержание дисциплины
Лекции
Основы теории автоматического измерения
Технические средства измерения температуры, расхода, уровня, давления
Практические
Содержание дисциплины
Лекции
Основы теории автоматического измерения
Технические средства измерения температуры, расхода, уровня, давления
Практические
Содержание лекции
Основы теории автоматического измерения
Основы теории автоматического измерения
Классификация систем регулирования.
Содержание лекции
Основы теории автоматического измерения
Основы теории автоматического измерения
Классификация систем регулирования.
Основы теории автоматического измерения
Основы теории автоматического измерения
Понятие системы управления
Система - совокупность (соединение) взаимосвязанных и взаимодействующих элементов, объединенных
Понятие системы управления
Система - совокупность (соединение) взаимосвязанных и взаимодействующих элементов, объединенных
Основные понятия
Технологический процесс (ТП) – это совокупность технологических операций, проводимых над
Основные понятия
Технологический процесс (ТП) – это совокупность технологических операций, проводимых над
Переменные, характеризующие технологический процесс
Выходные (Y) – переменные, характеризующие состояние объекта. Эти
Переменные, характеризующие технологический процесс
Выходные (Y) – переменные, характеризующие состояние объекта. Эти
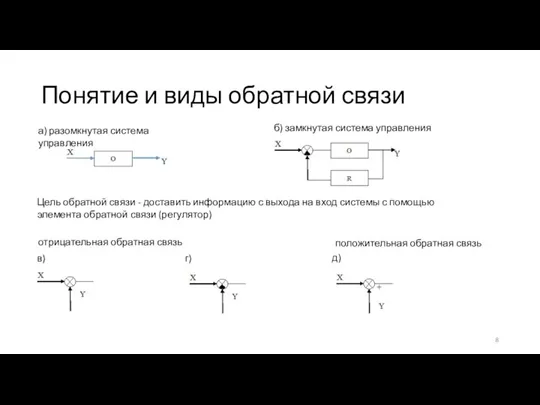
Понятие и виды обратной связи
а) разомкнутая система управления
б) замкнутая система управления
отрицательная
Понятие и виды обратной связи
а) разомкнутая система управления
б) замкнутая система управления
отрицательная
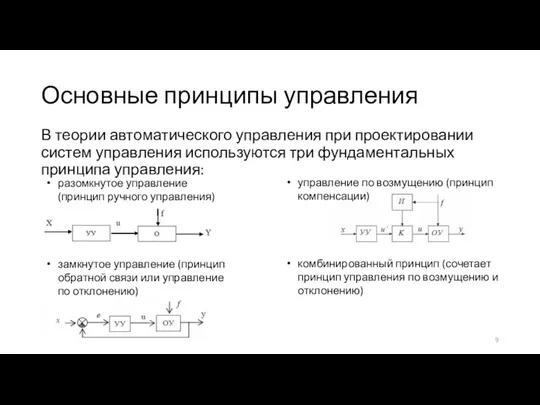
Основные принципы управления
В теории автоматического управления при проектировании систем управления используются
Основные принципы управления
В теории автоматического управления при проектировании систем управления используются
Классификация систем регулирования
Классификация систем регулирования
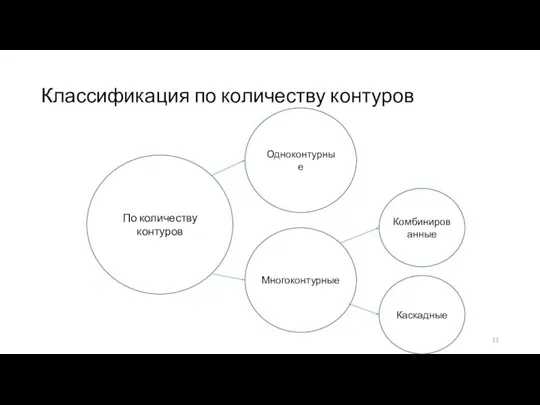
По количеству контуров
Одноконтурные
Классификация по количеству контуров
Многоконтурные
Комбинированные
Каскадные
По количеству контуров
Одноконтурные
Классификация по количеству контуров
Многоконтурные
Комбинированные
Каскадные
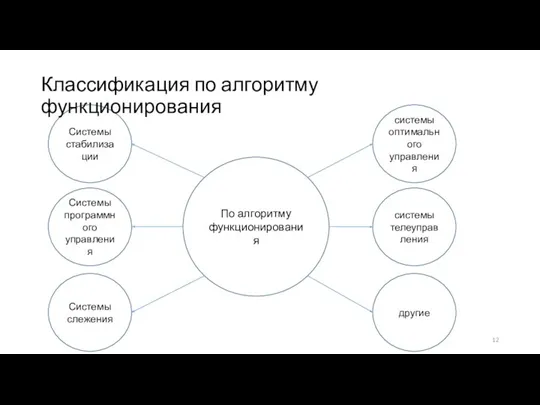
По алгоритму функционирования
Системы стабилизации
Системы программного управления
Системы слежения
системы оптимального управления
системы телеуправления
другие
Классификация по
По алгоритму функционирования
Системы стабилизации
Системы программного управления
Системы слежения
системы оптимального управления
системы телеуправления
другие
Классификация по
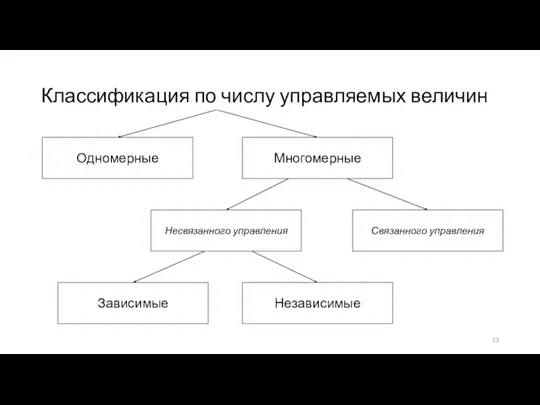
Классификация по числу управляемых величин
Одномерные
Многомерные
Несвязанного управления
Связанного управления
Зависимые
Независимые
Классификация по числу управляемых величин
Одномерные
Многомерные
Несвязанного управления
Связанного управления
Зависимые
Независимые
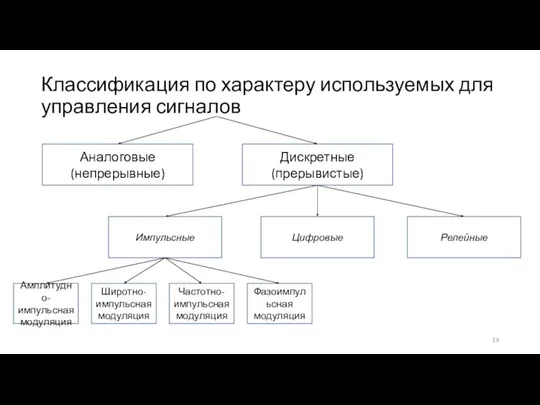
Классификация по характеру используемых для управления сигналов
Аналоговые (непрерывные)
Дискретные (прерывистые)
Релейные
Цифровые
Импульсные
Амплитудно-импульсная модуляция
Широтно-импульсная модуляция
Частотно-импульсная
Классификация по характеру используемых для управления сигналов
Аналоговые (непрерывные)
Дискретные (прерывистые)
Релейные
Цифровые
Импульсные
Амплитудно-импульсная модуляция
Широтно-импульсная модуляция
Частотно-импульсная
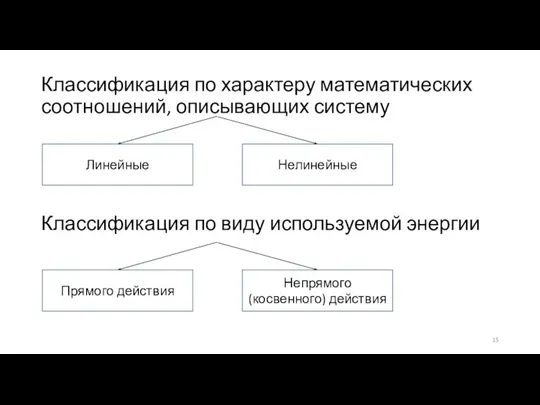
Классификация по характеру математических соотношений, описывающих систему
Линейные
Нелинейные
Классификация по виду используемой энергии
Прямого
Классификация по характеру математических соотношений, описывающих систему
Линейные
Нелинейные
Классификация по виду используемой энергии
Прямого
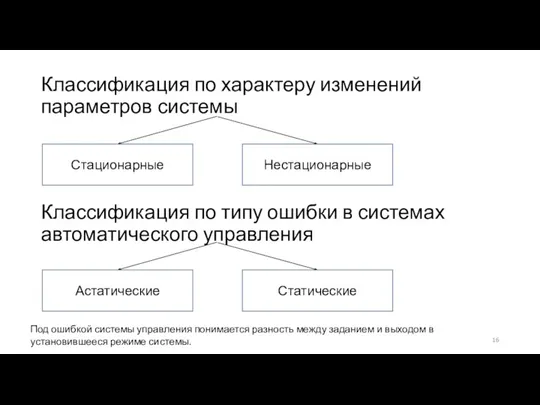
Классификация по характеру изменений параметров системы
Стационарные
Нестационарные
Классификация по типу ошибки в системах
Классификация по характеру изменений параметров системы
Стационарные
Нестационарные
Классификация по типу ошибки в системах
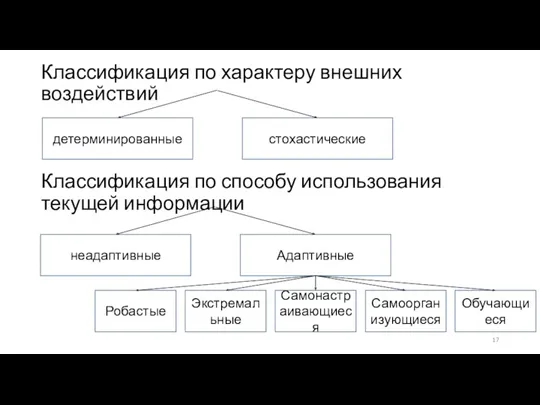
Классификация по характеру внешних воздействий
детерминированные
стохастические
Классификация по способу использования текущей информации
неадаптивные
Адаптивные
Робастые
Экстремальные
Самонастраивающиеся
Обучающиеся
Самоорганизующиеся
Классификация по характеру внешних воздействий
детерминированные
стохастические
Классификация по способу использования текущей информации
неадаптивные
Адаптивные
Робастые
Экстремальные
Самонастраивающиеся
Обучающиеся
Самоорганизующиеся

Одноконтурные и многоконтурные системы регулирования
а) Одноконтурная система регулирования
б) Комбинированная система регулирования
в)
Одноконтурные и многоконтурные системы регулирования
а) Одноконтурная система регулирования
б) Комбинированная система регулирования
в)
Свойства элементов автоматической системы регулирования
СТАТИЧЕСКИЕ характеристики указывают на зависимость между входными
Свойства элементов автоматической системы регулирования
СТАТИЧЕСКИЕ характеристики указывают на зависимость между входными
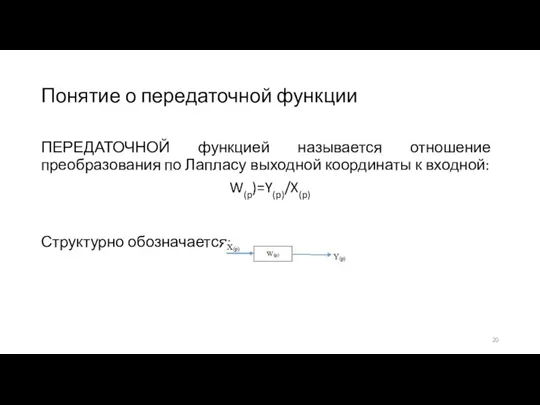
ПЕРЕДАТОЧНОЙ функцией называется отношение преобразования по Лапласу выходной координаты к входной:
W(p)=Y(p)/X(p)
Структурно
ПЕРЕДАТОЧНОЙ функцией называется отношение преобразования по Лапласу выходной координаты к входной:
W(p)=Y(p)/X(p)
Структурно
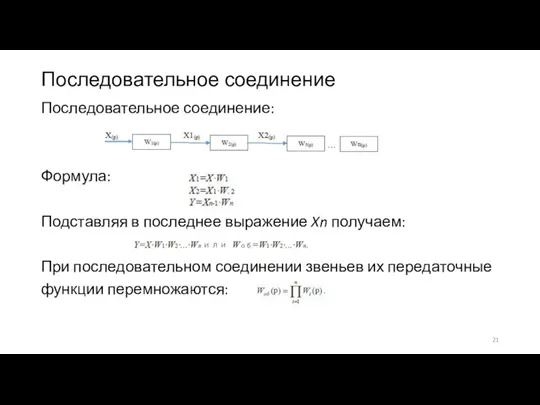
Последовательное соединение
Последовательное соединение:
Формула:
Подставляя в последнее выражение Xn получаем:
При последовательном соединении звеньев
Последовательное соединение
Последовательное соединение:
Формула:
Подставляя в последнее выражение Xn получаем:
При последовательном соединении звеньев
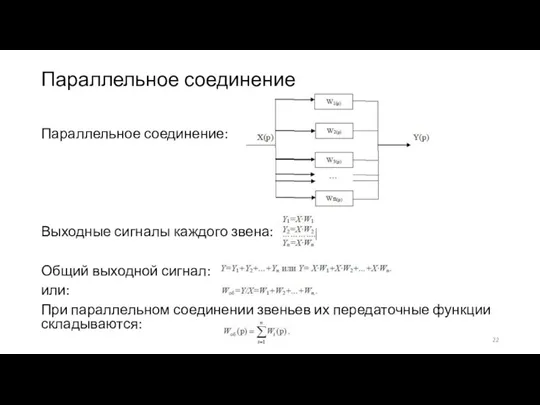
Параллельное соединение
Параллельное соединение:
Выходные сигналы каждого звена:
Общий выходной сигнал:
или:
При параллельном соединении
Параллельное соединение
Параллельное соединение:
Выходные сигналы каждого звена:
Общий выходной сигнал:
или:
При параллельном соединении
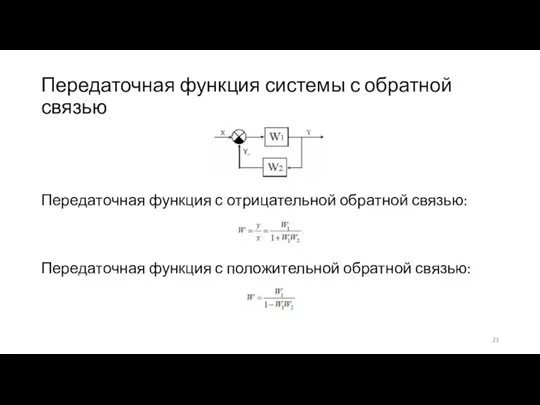
Передаточная функция с отрицательной обратной связью:
Передаточная функция с положительной обратной связью:
Передаточная
Передаточная функция с отрицательной обратной связью:
Передаточная функция с положительной обратной связью:
Передаточная
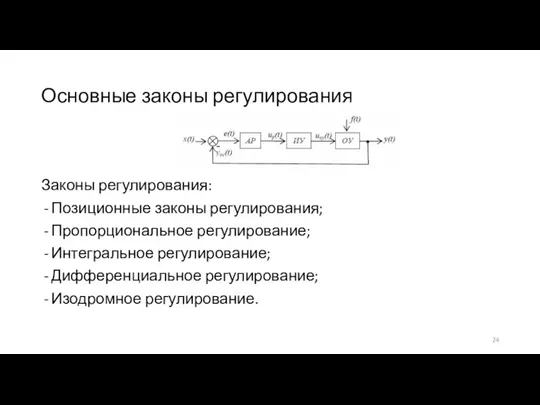
Законы регулирования:
Позиционные законы регулирования;
Пропорциональное регулирование;
Интегральное регулирование;
Дифференциальное регулирование;
Изодромное регулирование.
Основные законы регулирования
Законы регулирования:
Позиционные законы регулирования;
Пропорциональное регулирование;
Интегральное регулирование;
Дифференциальное регулирование;
Изодромное регулирование.
Основные законы регулирования
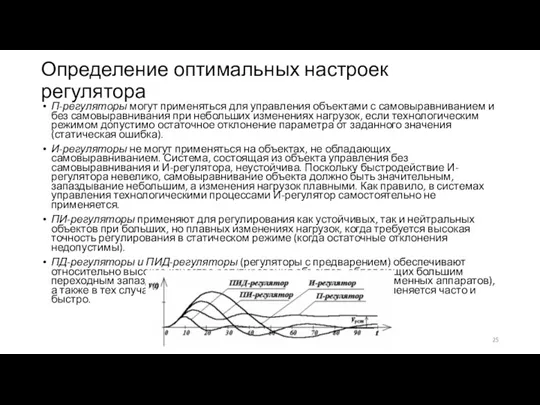
П-регуляторы могут применяться для управления объектами с самовыравниванием и без самовыравнивания
П-регуляторы могут применяться для управления объектами с самовыравниванием и без самовыравнивания
Анализ систем управления
Устойчивость – система должна оставаться устойчивой на всех режимах,
Анализ систем управления
Устойчивость – система должна оставаться устойчивой на всех режимах,
Устойчивость систем управления
Устойчивость – способность динамических систем возвращаться в исходное установившееся
Устойчивость систем управления
Устойчивость – способность динамических систем возвращаться в исходное установившееся
Корневой критерий устойчивости
Устойчива – с корнями 2, 4, 6;
Не устойчива –
Корневой критерий устойчивости
Устойчива – с корнями 2, 4, 6;
Не устойчива –
Алгебраический критерии устойчивости Гурвица
Определенность Гурвица:
Главные миноры:
Для устойчивости системы необходимо, чтобы все
Алгебраический критерии устойчивости Гурвица
Определенность Гурвица:
Главные миноры:
Для устойчивости системы необходимо, чтобы все
 Развитие общей выносливости. Средства и методы
Развитие общей выносливости. Средства и методы Снежное царство Нептуна в дошкольном учреждении
Снежное царство Нептуна в дошкольном учреждении Инвестиционные площадки Малопургинского района
Инвестиционные площадки Малопургинского района Конспект урока по химии в 8 классе по теме Простые вещества - металлы
Конспект урока по химии в 8 классе по теме Простые вещества - металлы Особенности отраслевых рынков с несовершенной конкуренцией
Особенности отраслевых рынков с несовершенной конкуренцией Школьное мороженое с йодом
Школьное мороженое с йодом О бездомных животных
О бездомных животных Вакуумные выключатели
Вакуумные выключатели Сочинение, эссе, этюд
Сочинение, эссе, этюд 20230929_seminar_18.05.2023g._zhalilova_ln
20230929_seminar_18.05.2023g._zhalilova_ln Clothing comparisons flashcards
Clothing comparisons flashcards Юрист в государственном секторе
Юрист в государственном секторе Презентация по уголку природы
Презентация по уголку природы Старинные меры длины
Старинные меры длины Автомобиль жолдарын көгалдандыру
Автомобиль жолдарын көгалдандыру Учителям – участникам Великой Отечественной войны посвящается
Учителям – участникам Великой Отечественной войны посвящается Презентация к уроку Шахматные игры с ладьей часть1
Презентация к уроку Шахматные игры с ладьей часть1 Интернет-проект к 65- летию Победы Забытый памятник незабытой войны номинация Краеведы рассказывают
Интернет-проект к 65- летию Победы Забытый памятник незабытой войны номинация Краеведы рассказывают музеи
музеи Основы телекоммуникаций. Виды модуляции и манипуляции первичных сигналов. (Тема 1.7)
Основы телекоммуникаций. Виды модуляции и манипуляции первичных сигналов. (Тема 1.7) Артикуляционная гимнастика для звука Ш
Артикуляционная гимнастика для звука Ш Основы конвективного теплообмена
Основы конвективного теплообмена Годовая бухгалтерская и налоговая отчетность организации: порядок составления и анализ ее основных показателей
Годовая бухгалтерская и налоговая отчетность организации: порядок составления и анализ ее основных показателей Wiki-газета. Фестиваль национальных культур: Мы разные, но мы вместе
Wiki-газета. Фестиваль национальных культур: Мы разные, но мы вместе 20231105_razvivat_umenie_detey_analizirovat_sravnivat_obobshchat_0
20231105_razvivat_umenie_detey_analizirovat_sravnivat_obobshchat_0 Present Perfect
Present Perfect Прямая и обратная пропорция зависимости
Прямая и обратная пропорция зависимости Квизы. Простой способ получить контакт клиента
Квизы. Простой способ получить контакт клиента