- Система управления. Релейный регулятор. Силовой мотор

Содержание
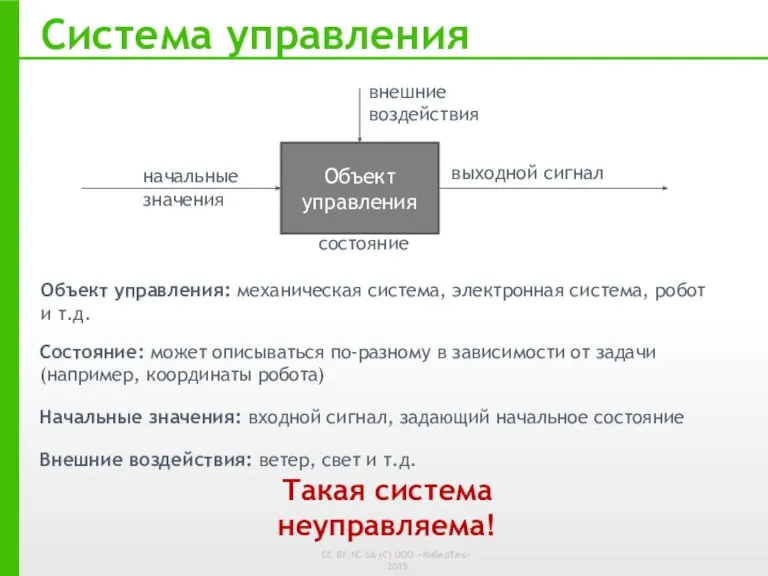
- 2. Система управления Объект управления начальные значения внешние воздействия состояние выходной сигнал Объект управления: механическая система, электронная
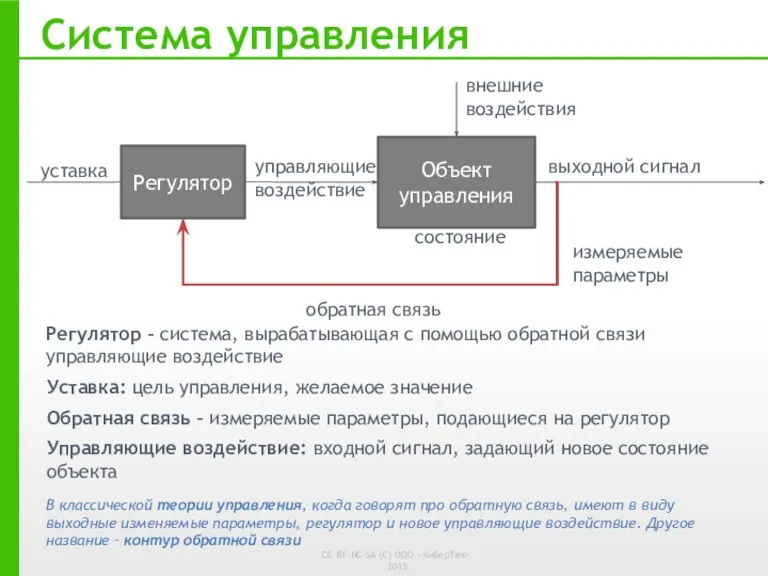
- 3. Система управления Объект управления уставка внешние воздействия состояние выходной сигнал Регулятор – система, вырабатывающая с помощью
- 4. Ножка под углом Задача: поставить ножку под углом 90 градусов Модель: силовой мотор с несимметричной деталью
- 5. Ножка под углом Возьмите муфту колеса и закрепите её на оси силового мотора с помощью винтика
- 6. Ножка под углом Возьмите уголок 5х1х1 и закрепите на муфте с помощью винтика М4
- 7. Ножка под углом Возьмите проводок к силовому мотору: штекер с 2 ножками – питание, красный штекер
- 8. Ножка под углом У красного штекера имеется ножка. При подключение к контроллеру ножка должна быть справа
- 9. Релейный регулятор Система состояний. Регулятор переключается между двумя состояниями Условие Состояние 1 Начало Состояние 2 нет
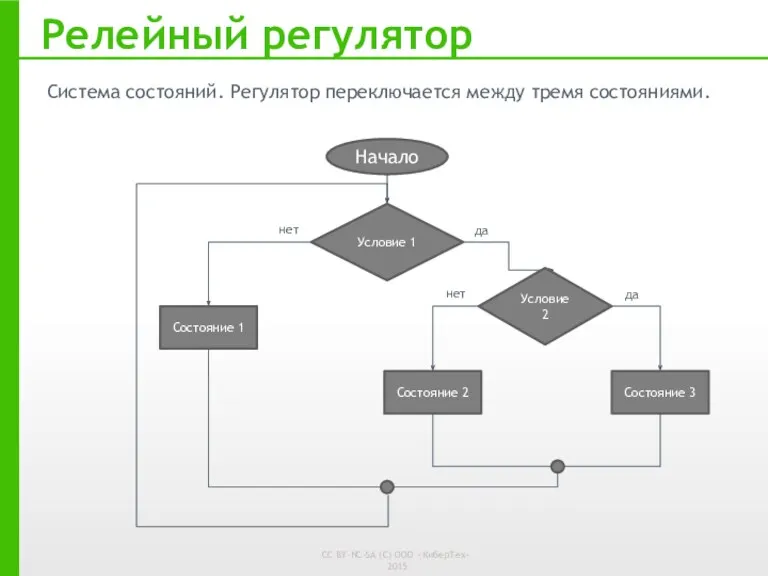
- 10. Релейный регулятор Система состояний. Регулятор переключается между тремя состояниями. Условие 1 Состояние 1 Начало Состояние 2
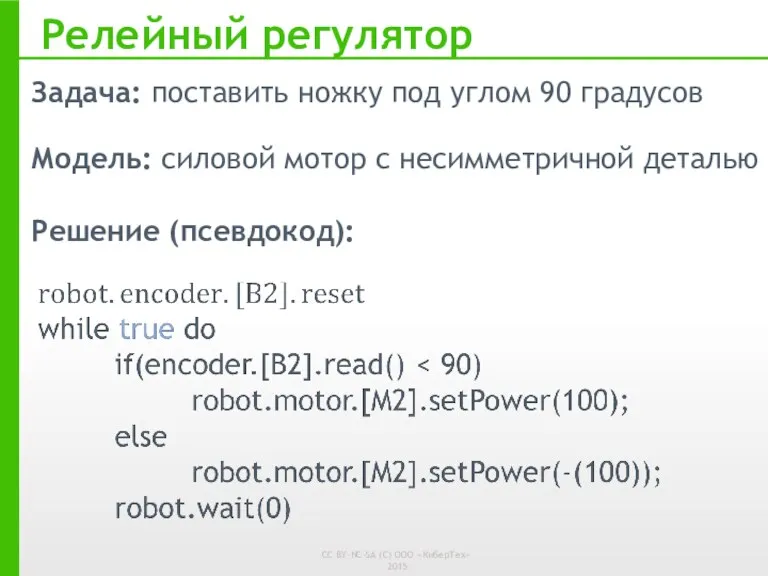
- 11. Релейный регулятор Задача: поставить ножку под углом 90 градусов Модель: силовой мотор с несимметричной деталью Решение
- 13. Скачать презентацию
Система управления
Объект управления
начальные значения
внешние воздействия
состояние
выходной сигнал
Объект управления: механическая система, электронная система,
Система управления
Объект управления
начальные значения
внешние воздействия
состояние
выходной сигнал
Объект управления: механическая система, электронная система,
Система управления
Объект управления
уставка
внешние воздействия
состояние
выходной сигнал
Регулятор – система, вырабатывающая с помощью обратной
Система управления
Объект управления
уставка
внешние воздействия
состояние
выходной сигнал
Регулятор – система, вырабатывающая с помощью обратной

Ножка под углом
Задача: поставить ножку под углом 90 градусов
Модель: силовой мотор
Ножка под углом
Задача: поставить ножку под углом 90 градусов
Модель: силовой мотор

Ножка под углом
Возьмите муфту колеса и закрепите её на оси силового
Ножка под углом
Возьмите муфту колеса и закрепите её на оси силового

Ножка под углом
Возьмите уголок 5х1х1 и закрепите на муфте с помощью
Ножка под углом
Возьмите уголок 5х1х1 и закрепите на муфте с помощью

Ножка под углом
Возьмите проводок к силовому мотору: штекер с 2 ножками
Ножка под углом
Возьмите проводок к силовому мотору: штекер с 2 ножками

Ножка под углом
У красного штекера имеется ножка. При подключение к контроллеру
Ножка под углом
У красного штекера имеется ножка. При подключение к контроллеру

Релейный регулятор
Система состояний. Регулятор переключается между двумя состояниями
Условие
Состояние 1
Начало
Состояние 2
нет
да
Релейный регулятор
Система состояний. Регулятор переключается между двумя состояниями
Условие
Состояние 1
Начало
Состояние 2
нет
да
Релейный регулятор
Система состояний. Регулятор переключается между тремя состояниями.
Условие 1
Состояние 1
Начало
Состояние 2
Условие
Релейный регулятор
Система состояний. Регулятор переключается между тремя состояниями.
Условие 1
Состояние 1
Начало
Состояние 2
Условие
Релейный регулятор
Задача: поставить ножку под углом 90 градусов
Модель: силовой мотор с
Релейный регулятор
Задача: поставить ножку под углом 90 градусов
Модель: силовой мотор с
 Crash course истории Древней Руси
Crash course истории Древней Руси Историей вязания. Ассортимент изделий, выполненных в технике вязания на спицах
Историей вязания. Ассортимент изделий, выполненных в технике вязания на спицах Планирование коррекционной работы.
Планирование коррекционной работы. Психологические интерпретации эмоционально-ценностного отношения к водке Русский стандарт
Психологические интерпретации эмоционально-ценностного отношения к водке Русский стандарт Герои Отечества
Герои Отечества Введение во храм Пресвятой Богородицы
Введение во храм Пресвятой Богородицы Благодать вам и мир от Бога Отца и Господа нашего Иисуса Христа
Благодать вам и мир от Бога Отца и Господа нашего Иисуса Христа CD
CD Анна Николаевна Печёрская Дети – герои Великой Отечественной войны
Анна Николаевна Печёрская Дети – герои Великой Отечественной войны Строительство асфальтобетонных покрытий и оснований
Строительство асфальтобетонных покрытий и оснований Математические страницы истории Древнеи Индии.
Математические страницы истории Древнеи Индии. Презентация В гостях у сказки
Презентация В гостях у сказки Архитектурные памятники Липецкой области
Архитектурные памятники Липецкой области Танец в круге. Путешествие по комнате (защита от застреваний)
Танец в круге. Путешествие по комнате (защита от застреваний) Аукционный рынок
Аукционный рынок Тест-тренажер по сольфеджио (3 класс)
Тест-тренажер по сольфеджио (3 класс) Высокоскоростные магистрали и пассажирские станции. Лекция 1 ч.2
Высокоскоростные магистрали и пассажирские станции. Лекция 1 ч.2 Лютеранская церковь
Лютеранская церковь Неделя зимних игр и забав
Неделя зимних игр и забав Анализ стихотворного текста
Анализ стихотворного текста Понятие и структура валютной системы
Понятие и структура валютной системы Фантомдық тістерде Блэк бойынша I сынып тіс жегі қуыстарының дайындауы(Кіші азу тіс және Үлкен азу тістерде)
Фантомдық тістерде Блэк бойынша I сынып тіс жегі қуыстарының дайындауы(Кіші азу тіс және Үлкен азу тістерде) В. Борисов-Мусатов
В. Борисов-Мусатов Система ЦТ SECAM
Система ЦТ SECAM Назовите фигуру
Назовите фигуру Burger King
Burger King Гимнастика для глаз
Гимнастика для глаз Презентация Окно в мир танца
Презентация Окно в мир танца