- Танец в круге. Путешествие по комнате (защита от застреваний)

Содержание
- 2. Калибровка датчика выполняется для определения граничного условия или желаемого значения (уставки). Оформляется обычно в подпрограмму Задача:
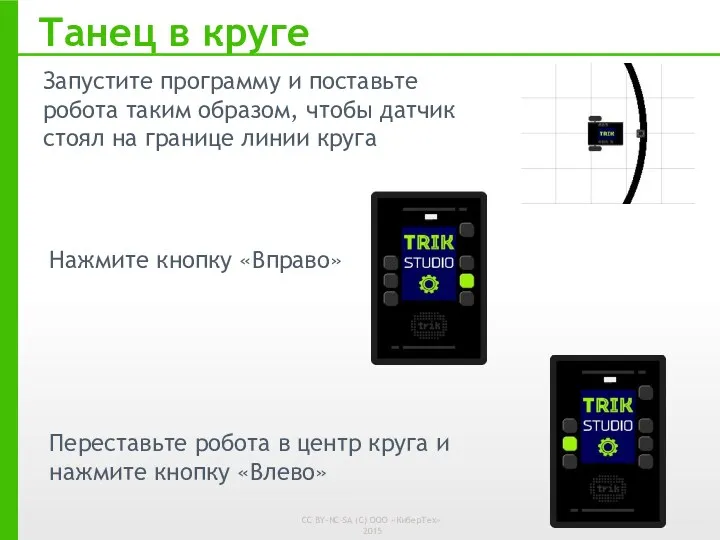
- 3. Ожидаем нажатия кнопки «Вправо» на контроллере ТРИК, чтобы успеть переставить робота на границу линии круга. Запоминаем
- 4. В случае, если граница достигнута, выполняется отъезд с разворотом, в противном случае – едем прямо со
- 5. Перед вторым действием в данном алгоритме значения энкодеров не сбрасываются. Значит, последнее положение обоих энкодеров (B3,
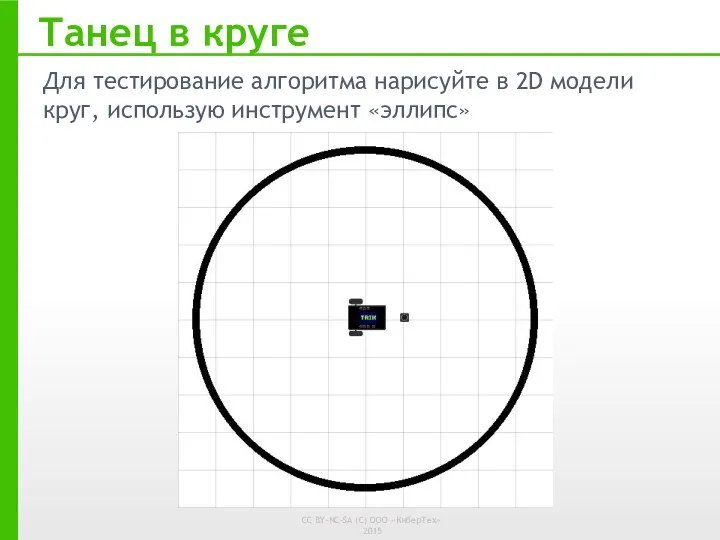
- 6. Танец в круге Для тестирование алгоритма нарисуйте в 2D модели круг, использую инструмент «эллипс»
- 7. Танец в круге Запустите программу и поставьте робота таким образом, чтобы датчик стоял на границе линии
- 8. Танец в круге В начало программы добавьте блок «Опустить маркер», выбрав в его свойствах желтый цвет.
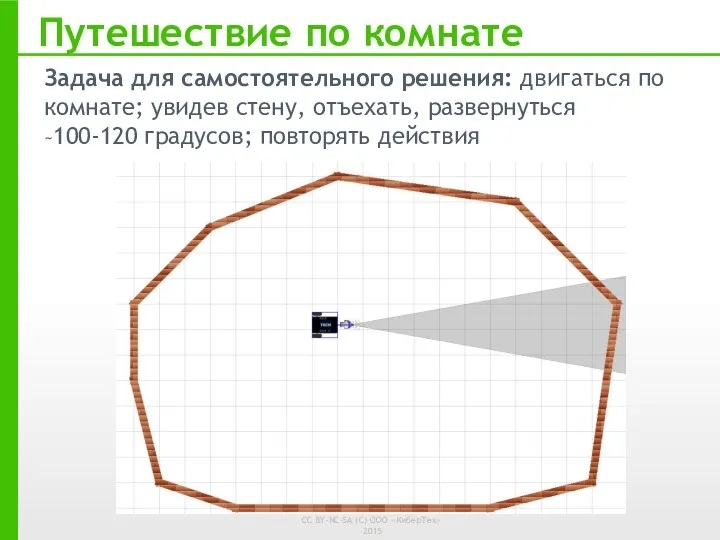
- 9. Путешествие по комнате Задача для самостоятельного решения: двигаться по комнате; увидев стену, отъехать, развернуться ~100-120 градусов;
- 10. Путешествие по комнате Одна из важных характеристик робота – автономность. Робот должен выбираться из «сложных» ситуаций
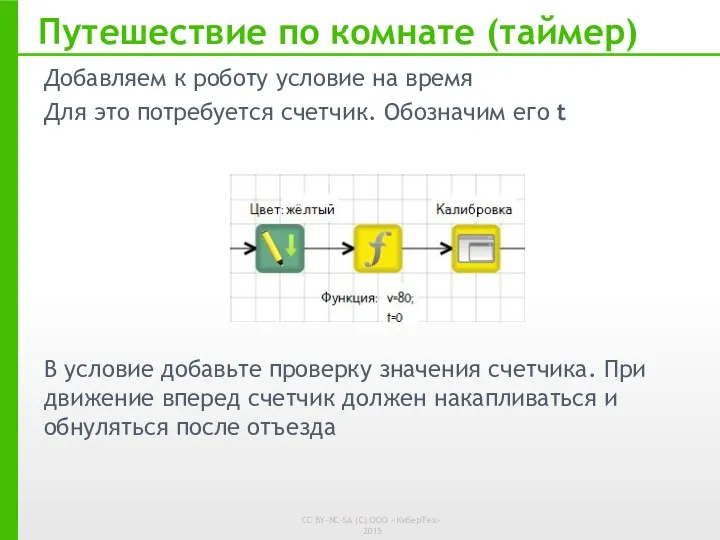
- 11. Путешествие по комнате (таймер) Добавляем к роботу условие на время Для это потребуется счетчик. Обозначим его
- 12. Путешествие по комнате (таймер) Алгоритм решения в ТРИК Студии
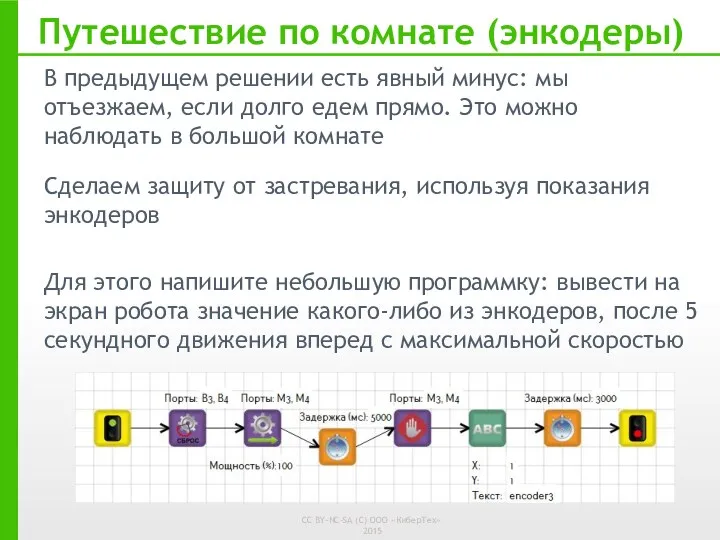
- 13. Путешествие по комнате (энкодеры) В предыдущем решении есть явный минус: мы отъезжаем, если долго едем прямо.
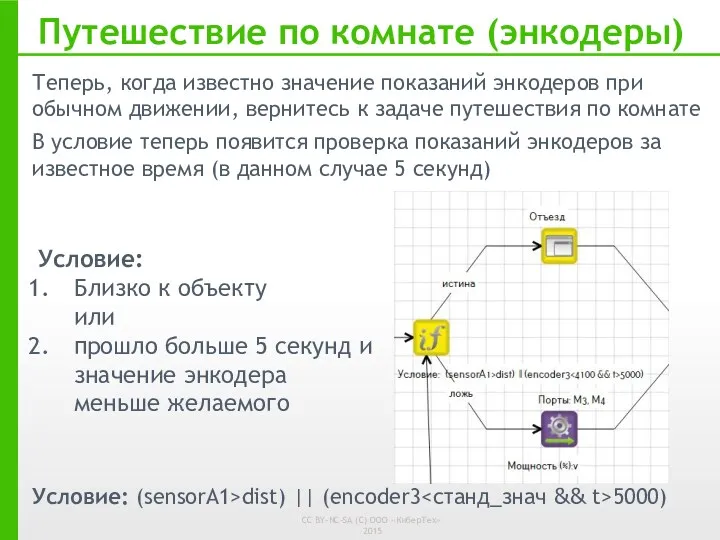
- 14. Путешествие по комнате (энкодеры) Теперь, когда известно значение показаний энкодеров при обычном движении, вернитесь к задаче
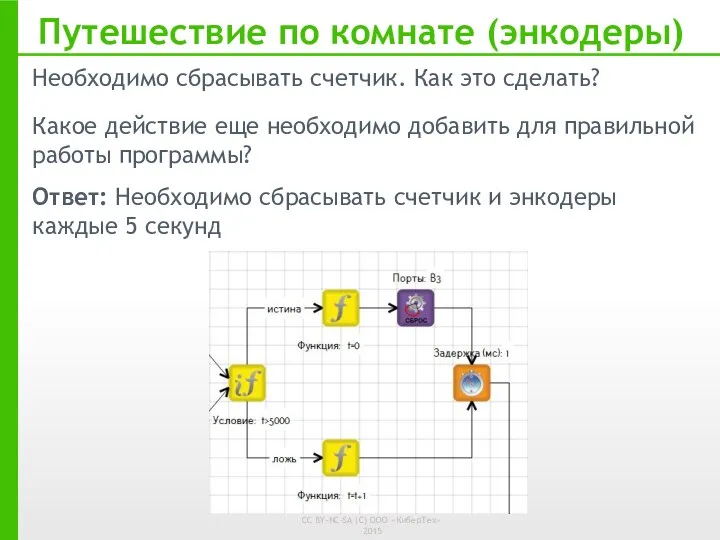
- 15. Путешествие по комнате (энкодеры) Необходимо сбрасывать счетчик. Как это сделать? Ответ: Необходимо сбрасывать счетчик и энкодеры
- 17. Скачать презентацию
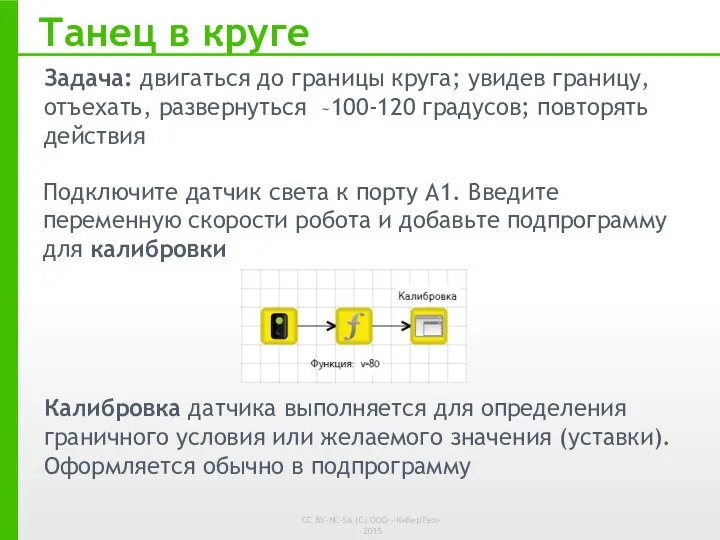
Калибровка датчика выполняется для определения граничного условия или желаемого значения (уставки).
Оформляется
Калибровка датчика выполняется для определения граничного условия или желаемого значения (уставки).
Оформляется

Ожидаем нажатия кнопки «Вправо» на контроллере ТРИК, чтобы успеть переставить робота
Ожидаем нажатия кнопки «Вправо» на контроллере ТРИК, чтобы успеть переставить робота

В случае, если граница достигнута, выполняется отъезд с разворотом, в противном
В случае, если граница достигнута, выполняется отъезд с разворотом, в противном
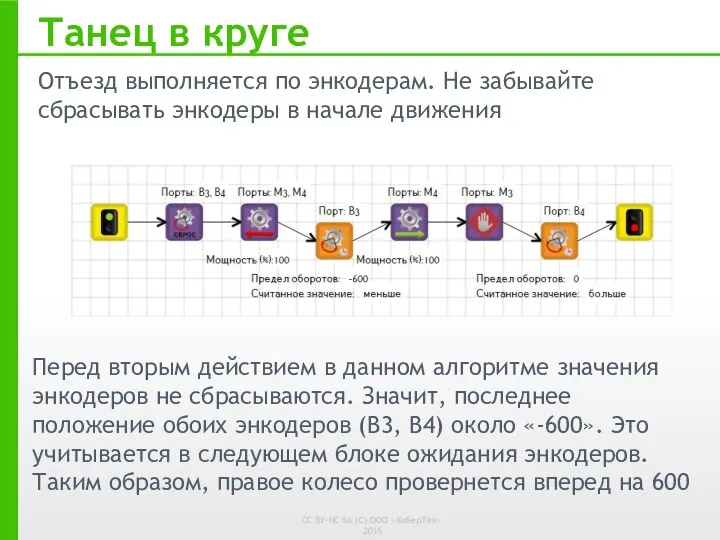
Перед вторым действием в данном алгоритме значения энкодеров не сбрасываются. Значит,
Перед вторым действием в данном алгоритме значения энкодеров не сбрасываются. Значит,
Танец в круге
Для тестирование алгоритма нарисуйте в 2D модели круг, использую
Танец в круге
Для тестирование алгоритма нарисуйте в 2D модели круг, использую
Танец в круге
Запустите программу и поставьте робота таким образом, чтобы датчик
Танец в круге
Запустите программу и поставьте робота таким образом, чтобы датчик

Танец в круге
В начало программы добавьте блок «Опустить маркер», выбрав в
Танец в круге
В начало программы добавьте блок «Опустить маркер», выбрав в
Путешествие по комнате
Задача для самостоятельного решения: двигаться по комнате; увидев стену,
Путешествие по комнате
Задача для самостоятельного решения: двигаться по комнате; увидев стену,
Путешествие по комнате
Одна из важных характеристик робота – автономность. Робот должен
Путешествие по комнате
Одна из важных характеристик робота – автономность. Робот должен
Путешествие по комнате (таймер)
Добавляем к роботу условие на время
Для это потребуется
Путешествие по комнате (таймер)
Добавляем к роботу условие на время
Для это потребуется

Путешествие по комнате (таймер)
Алгоритм решения в ТРИК Студии
Путешествие по комнате (таймер)
Алгоритм решения в ТРИК Студии
Путешествие по комнате (энкодеры)
В предыдущем решении есть явный минус: мы отъезжаем,
Путешествие по комнате (энкодеры)
В предыдущем решении есть явный минус: мы отъезжаем,
Путешествие по комнате (энкодеры)
Теперь, когда известно значение показаний энкодеров при обычном
Путешествие по комнате (энкодеры)
Теперь, когда известно значение показаний энкодеров при обычном
Путешествие по комнате (энкодеры)
Необходимо сбрасывать счетчик. Как это сделать?
Ответ: Необходимо сбрасывать
Путешествие по комнате (энкодеры)
Необходимо сбрасывать счетчик. Как это сделать?
Ответ: Необходимо сбрасывать
 Печальные результаты хозяйственной деятельности человека. Чернобыль - мёртвый город
Печальные результаты хозяйственной деятельности человека. Чернобыль - мёртвый город Проект озеленення приватного будинку
Проект озеленення приватного будинку Дизайн проект по совершенствованию развивающей среды логопедического кабинета
Дизайн проект по совершенствованию развивающей среды логопедического кабинета Карбонильные соединения - альдегиды
Карбонильные соединения - альдегиды Основания и фундаменты исторических зданий
Основания и фундаменты исторических зданий Перспективные направления развития цифровой экономики
Перспективные направления развития цифровой экономики Федор Михайлович Достоевский Белые ночи. Тип петербургского мечтателя. Тема одиночества человека в страшном мире ночей
Федор Михайлович Достоевский Белые ночи. Тип петербургского мечтателя. Тема одиночества человека в страшном мире ночей 20230903_delenie_teksta_na_predlozheniya
20230903_delenie_teksta_na_predlozheniya Родительское собрание Курить – здоровью вредить.
Родительское собрание Курить – здоровью вредить. Чупсы в Санкт-Петербурге
Чупсы в Санкт-Петербурге Презентация День победы и беседа в ГПД.
Презентация День победы и беседа в ГПД. Формирование типа правильной читательской деятельности
Формирование типа правильной читательской деятельности Древний Египет. Среднее царство
Древний Египет. Среднее царство НижГЭС_сбережение водных ресурсов
НижГЭС_сбережение водных ресурсов Как с помощью Matrix заработать 30 000 prizm
Как с помощью Matrix заработать 30 000 prizm Ель (лат.Picea)
Ель (лат.Picea) Тепловая работа и конструкции рекуператоров
Тепловая работа и конструкции рекуператоров Решение и обсуждение проблемных ситуаций с педагогами
Решение и обсуждение проблемных ситуаций с педагогами Дыхательная недостаточность
Дыхательная недостаточность Культура постмодернизма
Культура постмодернизма Кросскультурный шок
Кросскультурный шок Декартова система координат
Декартова система координат Наполеоновские войны
Наполеоновские войны Южная Осетия. Лекция 7.1
Южная Осетия. Лекция 7.1 Культурное пространство Руси
Культурное пространство Руси Стена в грунте
Стена в грунте Пропедевтика внутренних болезней (ПВБ)
Пропедевтика внутренних болезней (ПВБ) Интерактивная игра по географии Знаешь ли ты географию
Интерактивная игра по географии Знаешь ли ты географию