- Системы автоматического регулирования

Содержание
- 2. Классификация системы автоматического регулирования. Система автоматического регулирования (САР) – совокупность объекта управления и автоматического регулятора, взаимодействующих
- 3. Классификация системы автоматического регулирования. По принципу регулирования все системы могут быть разделены на две группы. Первая
- 4. Классификация системы автоматического регулирования. Вторая группа основана на принципе регулирования по возмущению. САР по возмущению является
- 5. Система теплогазоснабжения и вентиляции. В системах ТГиВ основными регулируемыми физическими параметрами могут быть: – температура горячей
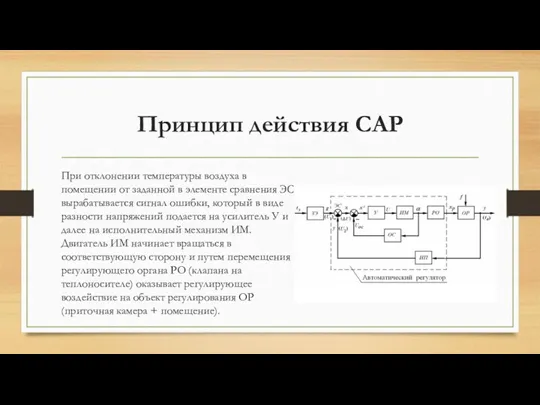
- 6. Принцип действия САР При отклонении температуры воздуха в помещении от заданной в элементе сравнения ЭС вырабатывается
- 7. Принцип действия САР После отработки ошибки двигатель ИМ останавливается. При этом температура воздуха в помещении приближается
- 8. Системы прямого и непрямого регулирования. Системы, в которых регулирующий орган перемещается непосредственно чувствительным элементом, называются системами
- 9. Системы прямого и непрямого регулирования. В систему непрямого регулирования (рис. 3.3б) дополнительно входит устройство, позволяющее усилить
- 10. Системы прямого и непрямого регулирования. система прямого регулирования система непрямого регулирования Рис. 3.3
- 11. Статические и астатические системы. Статической называется такая САР, в которой регулируемая величина определяется остаточным (статическим) отклонением
- 12. Статические и астатические системы. При повышении уровня открытие клапана уменьшается. Поэтому каждому расходу жидкости в установившемся
- 13. Статические и астатические системы. Астатической САР называется такая система регулирования, которая в установившемся режиме работает без
- 15. Скачать презентацию
Классификация системы автоматического регулирования.
Система автоматического регулирования (САР) – совокупность объекта управления
Классификация системы автоматического регулирования.
Система автоматического регулирования (САР) – совокупность объекта управления
Классификация системы автоматического регулирования.
По принципу регулирования все системы могут быть разделены
Классификация системы автоматического регулирования.
По принципу регулирования все системы могут быть разделены
Классификация системы автоматического регулирования.
Вторая группа основана на принципе регулирования по возмущению.
Классификация системы автоматического регулирования.
Вторая группа основана на принципе регулирования по возмущению.
Система теплогазоснабжения и вентиляции.
В системах ТГиВ основными регулируемыми физическими параметрами
Система теплогазоснабжения и вентиляции.
В системах ТГиВ основными регулируемыми физическими параметрами
Принцип действия САР
При отклонении температуры воздуха в помещении от заданной в
Принцип действия САР
При отклонении температуры воздуха в помещении от заданной в

Принцип действия САР
После отработки ошибки двигатель ИМ останавливается. При этом температура
Принцип действия САР
После отработки ошибки двигатель ИМ останавливается. При этом температура
Системы прямого и непрямого регулирования.
Системы, в которых регулирующий орган перемещается непосредственно
Системы прямого и непрямого регулирования.
Системы, в которых регулирующий орган перемещается непосредственно

Системы прямого и непрямого регулирования.
В систему непрямого регулирования (рис. 3.3б) дополнительно
Системы прямого и непрямого регулирования.
В систему непрямого регулирования (рис. 3.3б) дополнительно

Системы прямого и непрямого регулирования.
система прямого регулирования
система непрямого регулирования
Рис. 3.3
Системы прямого и непрямого регулирования.
система прямого регулирования
система непрямого регулирования
Рис. 3.3
Статические и астатические системы.
Статической называется такая САР, в которой регулируемая величина
Статические и астатические системы.
Статической называется такая САР, в которой регулируемая величина
Статические и астатические системы.
При повышении уровня открытие клапана уменьшается. Поэтому каждому
Статические и астатические системы.
При повышении уровня открытие клапана уменьшается. Поэтому каждому
Статические и астатические системы.
Астатической САР называется такая система регулирования, которая в
Статические и астатические системы.
Астатической САР называется такая система регулирования, которая в
 АППЛИКАЦИЯ ИЗ СУХИХ ЛИСТЬЕВ
АППЛИКАЦИЯ ИЗ СУХИХ ЛИСТЬЕВ Поколения. Взаимоотношение поколений
Поколения. Взаимоотношение поколений Одночлен и его стандартный вид
Одночлен и его стандартный вид Выступление на педсовете
Выступление на педсовете Семейство луковые
Семейство луковые Однофазные цепи синусоидального тока
Однофазные цепи синусоидального тока Pe^epaT no gncunn.iMHe Co^Ha^bHbIe ^aKTopbi aganTHBHOH $H3HnecKOH
Pe^epaT no gncunn.iMHe Co^Ha^bHbIe ^aKTopbi aganTHBHOH $H3HnecKOH Презентация экологического проекта
Презентация экологического проекта Кинусайга
Кинусайга Взрослость. Три стадии взрослости
Взрослость. Три стадии взрослости Презентация к уроку географии на тему Безлесные природные зоны России.
Презентация к уроку географии на тему Безлесные природные зоны России. Бытовые электроприборы на кухне
Бытовые электроприборы на кухне О взаимодействии и упорядочении признаков Рейнина
О взаимодействии и упорядочении признаков Рейнина Зарождение математики
Зарождение математики Презентация проекта - Семейные чтения
Презентация проекта - Семейные чтения Введение. Освоение шельфовых месторождений. Лекция №1
Введение. Освоение шельфовых месторождений. Лекция №1 Великобритания. Система сдержек и противовесов
Великобритания. Система сдержек и противовесов Zaschita_proekta_Struktura_etapy_publichnoe_vystuplenie
Zaschita_proekta_Struktura_etapy_publichnoe_vystuplenie Керамические отделочные материалы: сырье, основы технологии, свойства
Керамические отделочные материалы: сырье, основы технологии, свойства Презентация. Эколого-образовательный проект Мой зелёный друг
Презентация. Эколого-образовательный проект Мой зелёный друг Система центрального впрыска
Система центрального впрыска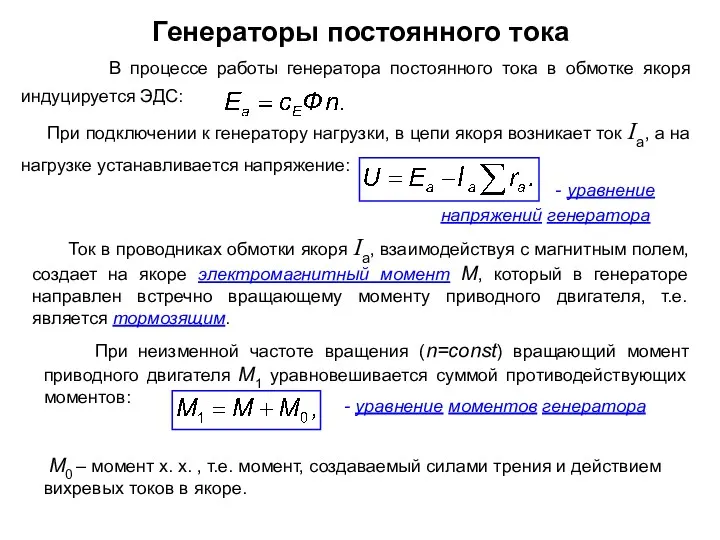 Генераторы постоянного тока
Генераторы постоянного тока Вторая младшая группа Солнышко
Вторая младшая группа Солнышко Международный день птиц
Международный день птиц Фонд развития Омской области имени С. И. Манякина
Фонд развития Омской области имени С. И. Манякина Базы данных и язык SQL
Базы данных и язык SQL Организация малярного участка АРМ с разработкой технологического лакокрасочного покрытия кабины и кузова грузового автомобиля
Организация малярного участка АРМ с разработкой технологического лакокрасочного покрытия кабины и кузова грузового автомобиля Moscow
Moscow