- Генераторы постоянного тока

Содержание
- 2. Генераторы постоянного тока
- 3. Основные характеристики генераторов постоянного тока 1. Характеристика холостого хода – зависимость U0 = f (Iв), при
- 4. Генератор постоянного тока независимого возбуждения
- 5. 1 – ГПТ независимого возбуждения Основные характеристики ГПТ параллельного возбуждения 1. Характеристика холостого хода – зависимость
- 6. Основные характеристики ГПТ параллельного возбуждения 4. Регулировочная характеристика Iв = f (Iа), при Uа = const
- 7. Генератор постоянного тока смешанного возбуждения
- 8. Основы электропривода К. Маркс: «Всякое развитое машинное устройство состоит из трех существенно различных частей: машины двигателя,
- 9. Классификация электроприводов 2) индивидуальный (на каждом рабочем механизме свой двигатель); Преимущества: - производственные помещения не загромождаются
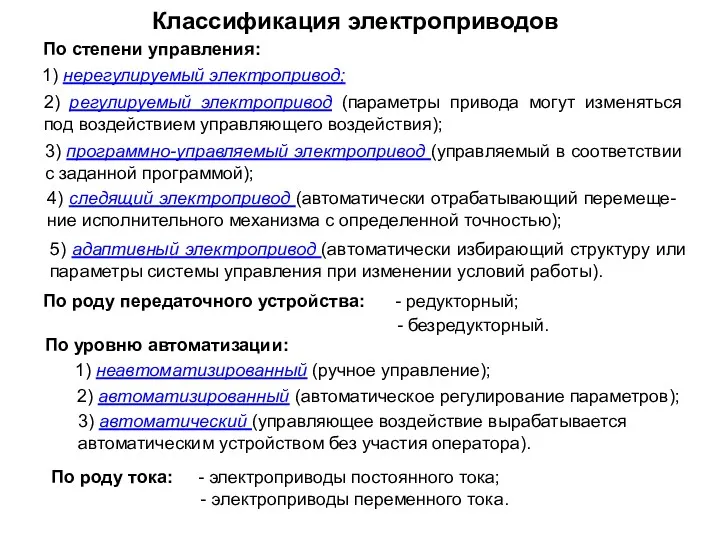
- 10. Классификация электроприводов По степени управления: 1) нерегулируемый электропривод; 2) регулируемый электропривод (параметры привода могут изменяться под
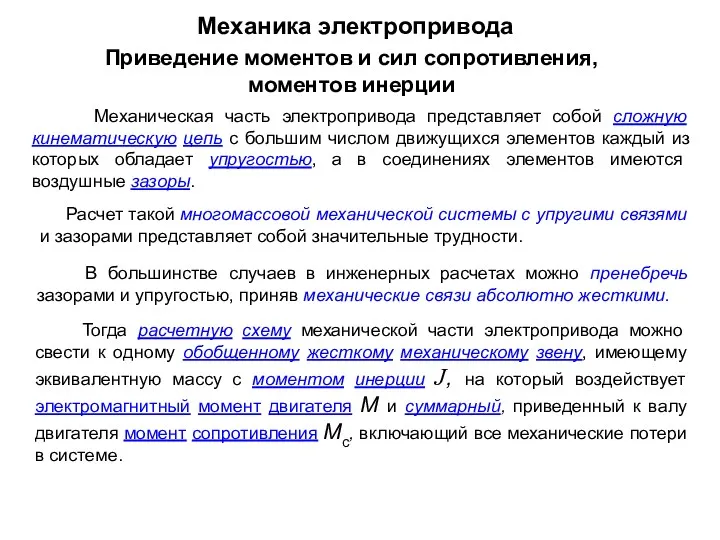
- 11. Механика электропривода Механическая часть электропривода представляет собой сложную кинематическую цепь с большим числом движущихся элементов каждый
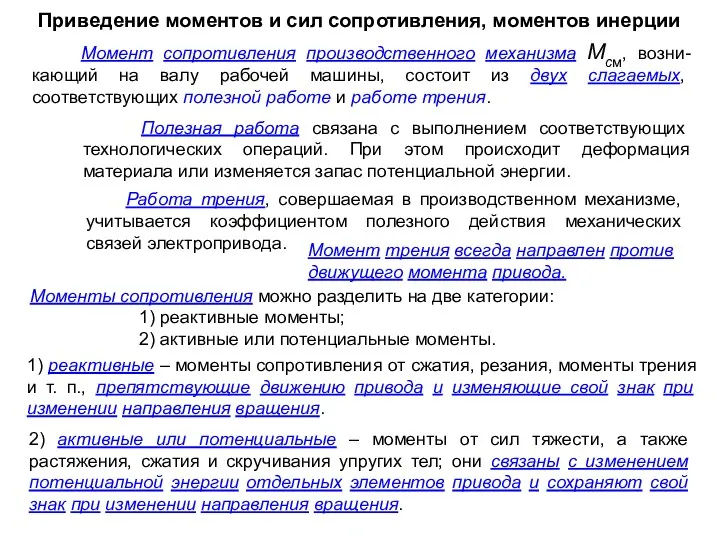
- 12. Приведение моментов и сил сопротивления, моментов инерции Момент сопротивления производственного механизма Мсм, возни-кающий на валу рабочей
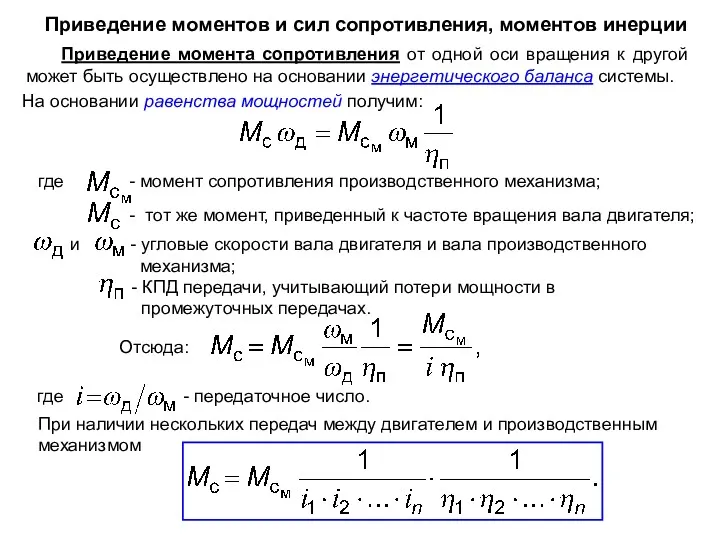
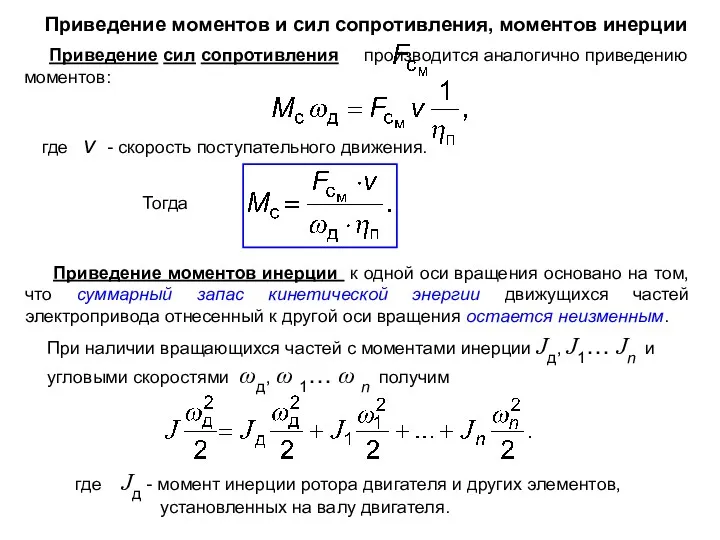
- 13. Приведение моментов и сил сопротивления, моментов инерции Приведение момента сопротивления от одной оси вращения к другой
- 14. Приведение моментов и сил сопротивления, моментов инерции Приведение моментов инерции к одной оси вращения основано на
- 15. Приведение моментов и сил сопротивления, моментов инерции
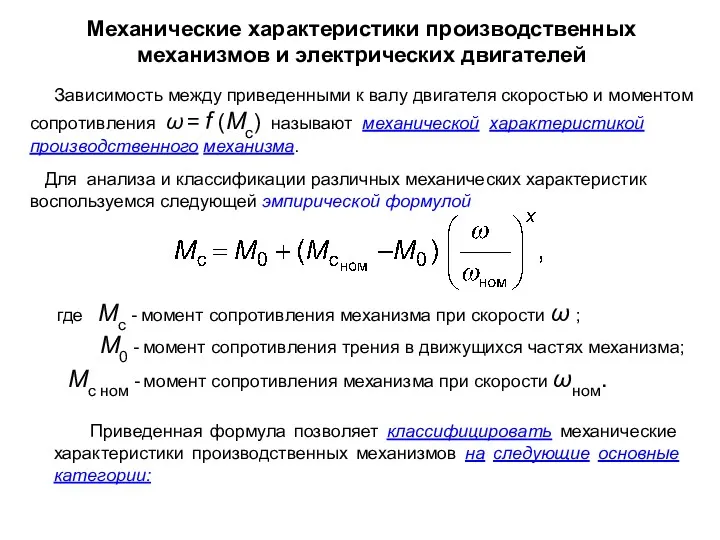
- 16. Механические характеристики производственных механизмов и электрических двигателей Зависимость между приведенными к валу двигателя скоростью и моментом
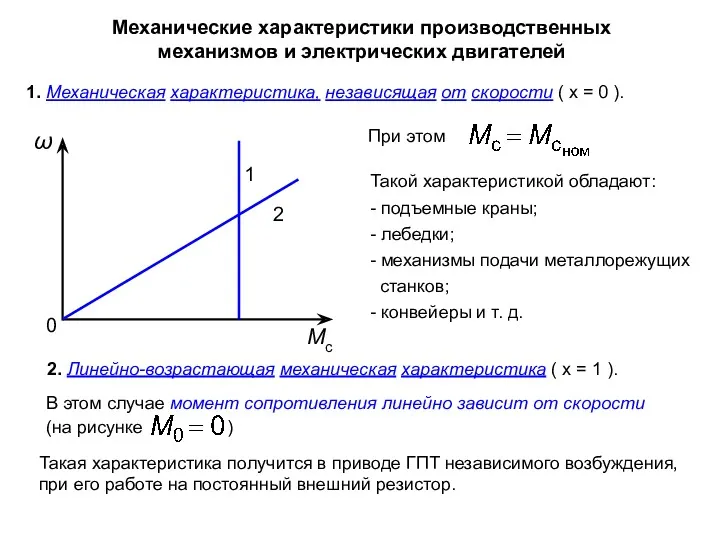
- 17. Механические характеристики производственных механизмов и электрических двигателей 1. Механическая характеристика, независящая от скорости ( x =
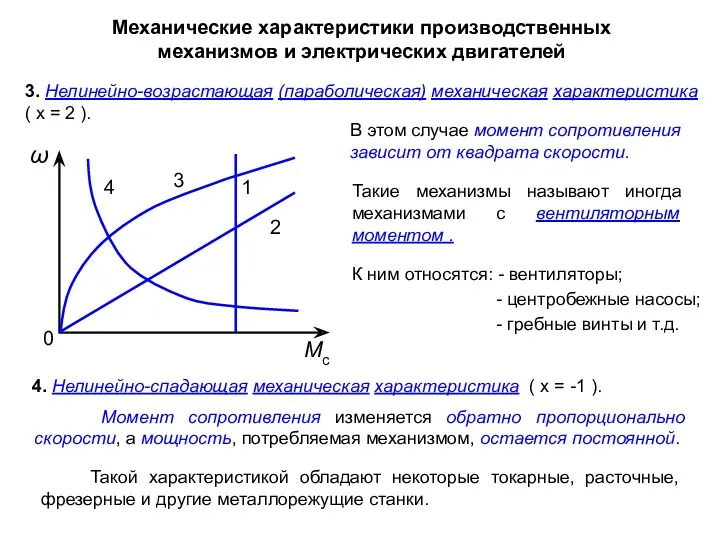
- 18. Механические характеристики производственных механизмов и электрических двигателей 3. Нелинейно-возрастающая (параболическая) механическая характеристика ( x = 2
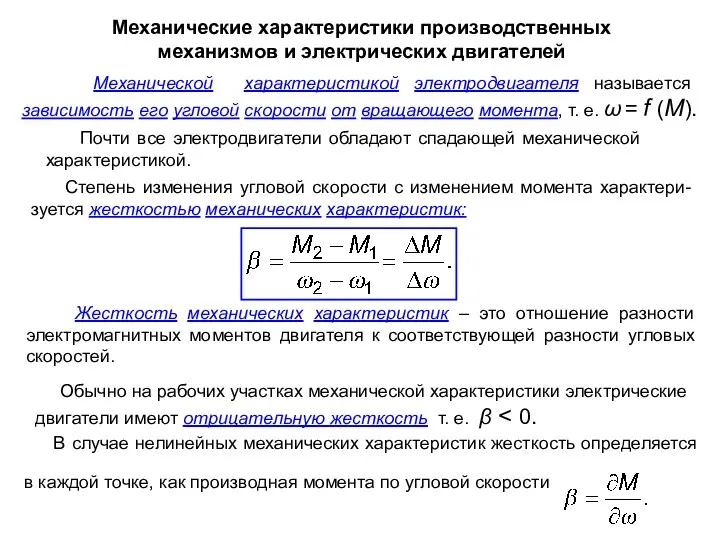
- 19. Механические характеристики производственных механизмов и электрических двигателей Механической характеристикой электродвигателя называется зависимость его угловой скорости от
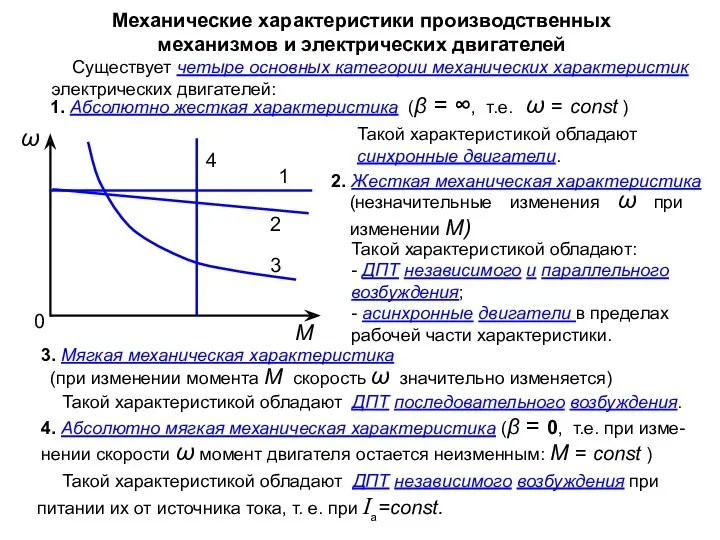
- 20. Механические характеристики производственных механизмов и электрических двигателей Существует четыре основных категории механических характеристик электрических двигателей: 1.
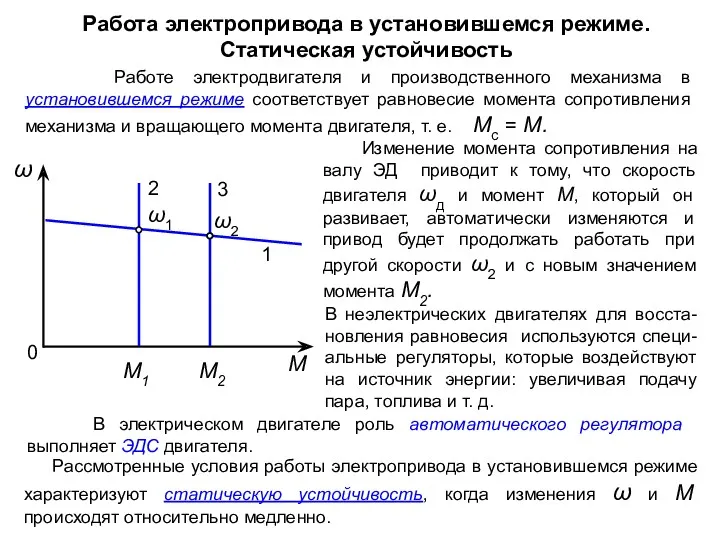
- 21. Работа электропривода в установившемся режиме. Статическая устойчивость Работе электродвигателя и производственного механизма в установившемся режиме соответствует
- 22. Работа электропривода в установившемся режиме. Статическая устойчивость Под статической устойчивостью понимают такое состояние установившегося режима, когда
- 23. Работа электропривода в установившемся режиме. Статическая устойчивость Асинхронный двигатель с короткозамкнутым ротором В точке А (β
- 24. Уравнение движения электропривода Кроме установившегося режима электропривод может ускоряться или замедляться. При этом возникают инерционные силы
- 25. Уравнение движения электропривода 1. Вращающий момент М принимается положительным, если он направлен в сторону вращения привода.
- 27. Скачать презентацию
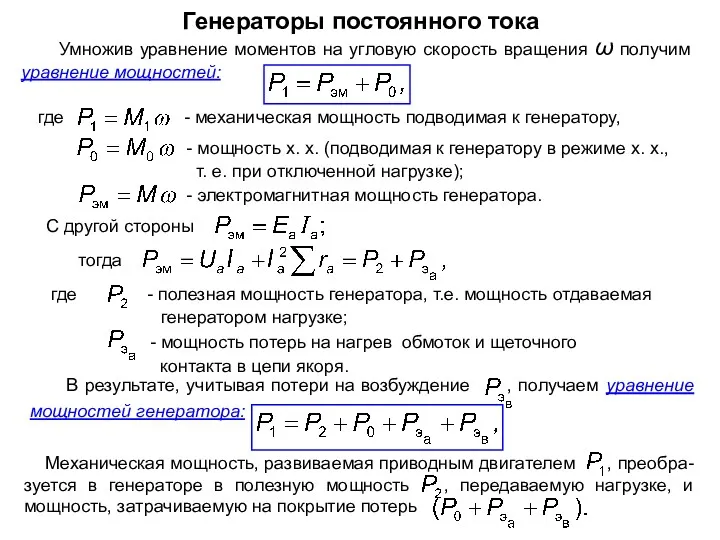
Генераторы постоянного тока
Генераторы постоянного тока
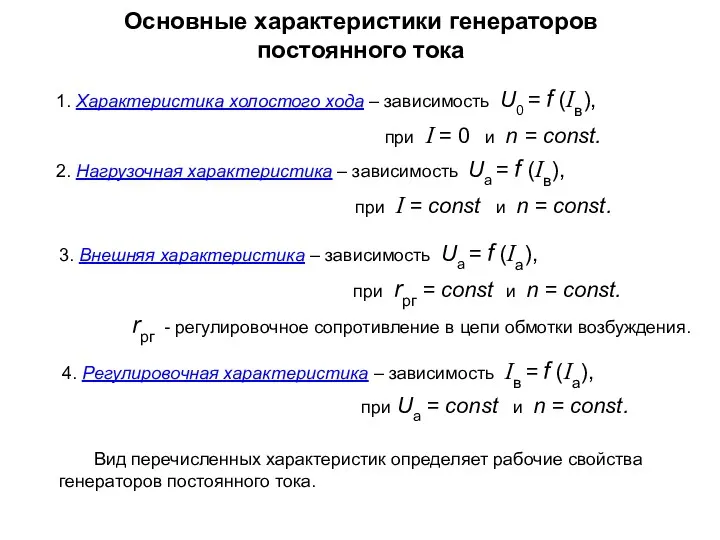
Основные характеристики генераторов
постоянного тока
1. Характеристика холостого хода – зависимость U0 =
Основные характеристики генераторов
постоянного тока
1. Характеристика холостого хода – зависимость U0 =
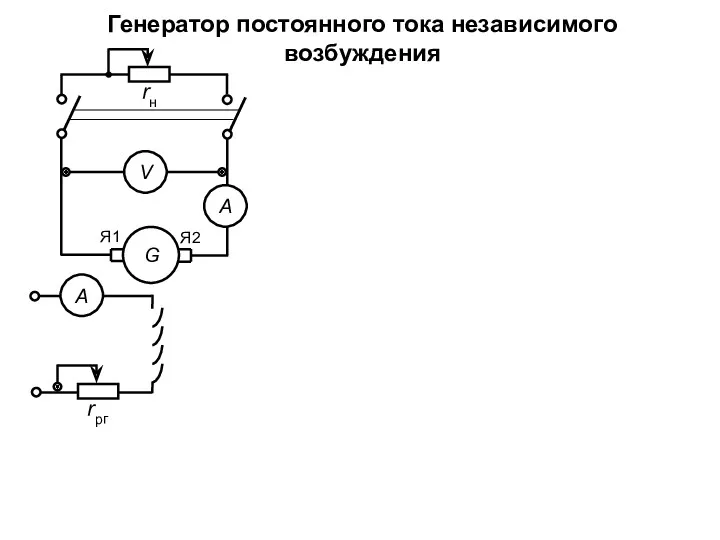
Генератор постоянного тока независимого возбуждения
Генератор постоянного тока независимого возбуждения
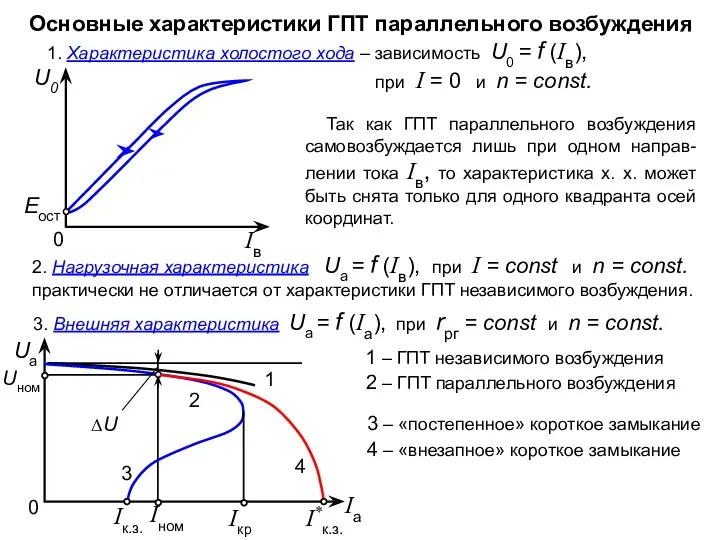
1 – ГПТ независимого возбуждения
Основные характеристики ГПТ параллельного возбуждения
1. Характеристика холостого
1 – ГПТ независимого возбуждения
Основные характеристики ГПТ параллельного возбуждения
1. Характеристика холостого
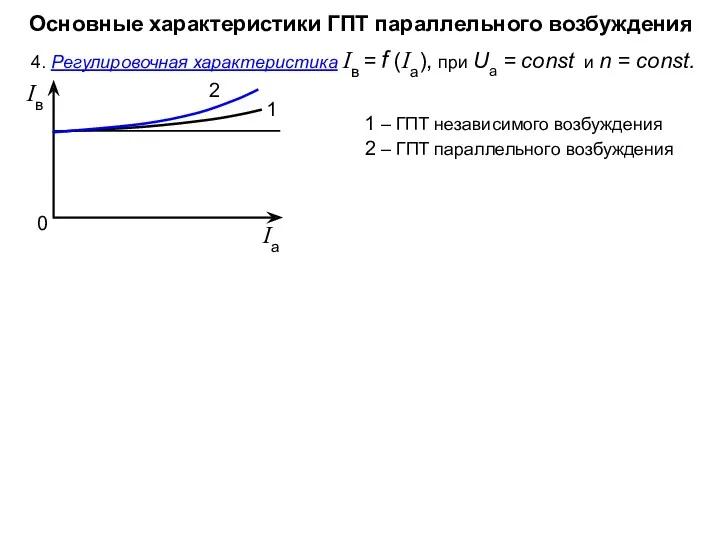
Основные характеристики ГПТ параллельного возбуждения
4. Регулировочная характеристика Iв = f (Iа),
Основные характеристики ГПТ параллельного возбуждения
4. Регулировочная характеристика Iв = f (Iа),
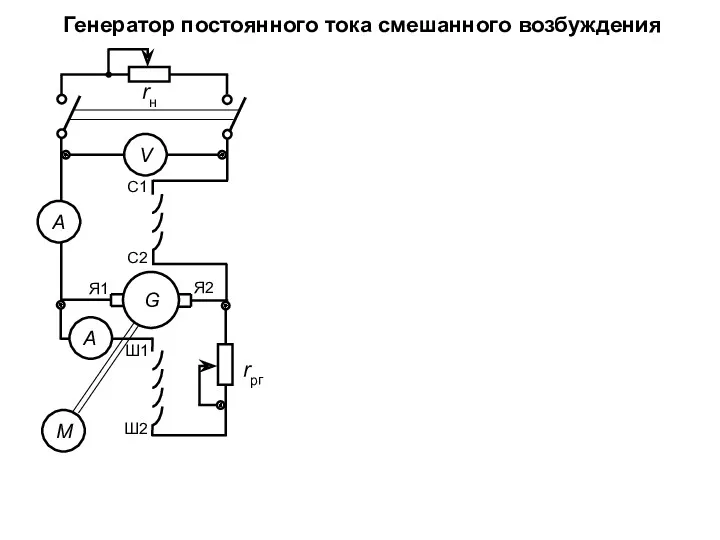
Генератор постоянного тока смешанного возбуждения
Генератор постоянного тока смешанного возбуждения
Основы электропривода
К. Маркс: «Всякое развитое машинное устройство состоит из трех существенно
Основы электропривода
К. Маркс: «Всякое развитое машинное устройство состоит из трех существенно
Классификация электроприводов
2) индивидуальный (на каждом рабочем механизме свой двигатель);
Преимущества:
- производственные
Классификация электроприводов
2) индивидуальный (на каждом рабочем механизме свой двигатель);
Преимущества:
- производственные
Классификация электроприводов
По степени управления:
1) нерегулируемый электропривод;
2) регулируемый электропривод (параметры привода могут
Классификация электроприводов
По степени управления:
1) нерегулируемый электропривод;
2) регулируемый электропривод (параметры привода могут
Механика электропривода
Механическая часть электропривода представляет собой сложную кинематическую цепь с
Механика электропривода
Механическая часть электропривода представляет собой сложную кинематическую цепь с
Приведение моментов и сил сопротивления, моментов инерции
Момент сопротивления производственного механизма
Приведение моментов и сил сопротивления, моментов инерции
Момент сопротивления производственного механизма
Приведение моментов и сил сопротивления, моментов инерции
Приведение момента сопротивления от
Приведение моментов и сил сопротивления, моментов инерции
Приведение момента сопротивления от
Приведение моментов и сил сопротивления, моментов инерции
Приведение моментов инерции к
Приведение моментов и сил сопротивления, моментов инерции
Приведение моментов инерции к
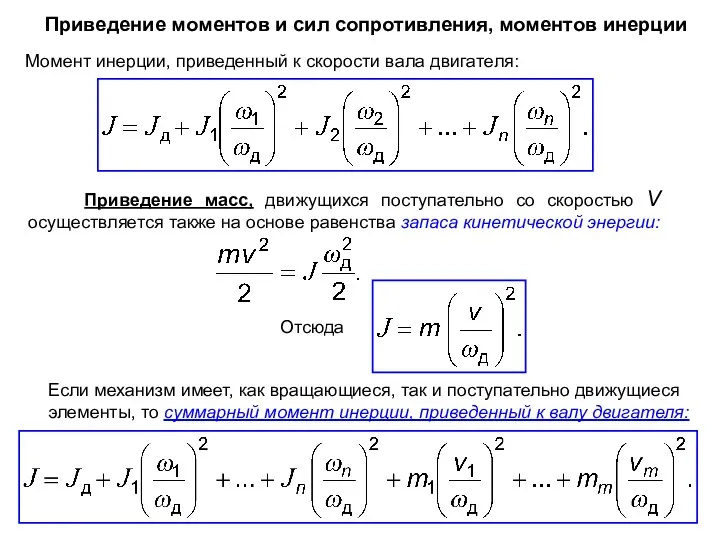
Приведение моментов и сил сопротивления, моментов инерции
Приведение моментов и сил сопротивления, моментов инерции
Механические характеристики производственных механизмов и электрических двигателей
Зависимость между приведенными к
Механические характеристики производственных механизмов и электрических двигателей
Зависимость между приведенными к
Механические характеристики производственных механизмов и электрических двигателей
1. Механическая характеристика, независящая от
Механические характеристики производственных механизмов и электрических двигателей
1. Механическая характеристика, независящая от
Механические характеристики производственных механизмов и электрических двигателей
3. Нелинейно-возрастающая (параболическая) механическая характеристика
Механические характеристики производственных механизмов и электрических двигателей
3. Нелинейно-возрастающая (параболическая) механическая характеристика
Механические характеристики производственных механизмов и электрических двигателей
Механической характеристикой электродвигателя называется
Механические характеристики производственных механизмов и электрических двигателей
Механической характеристикой электродвигателя называется
Механические характеристики производственных механизмов и электрических двигателей
Существует четыре основных категории
Механические характеристики производственных механизмов и электрических двигателей
Существует четыре основных категории
Работа электропривода в установившемся режиме. Статическая устойчивость
Работе электродвигателя и производственного
Работа электропривода в установившемся режиме. Статическая устойчивость
Работе электродвигателя и производственного
Работа электропривода в установившемся режиме. Статическая устойчивость
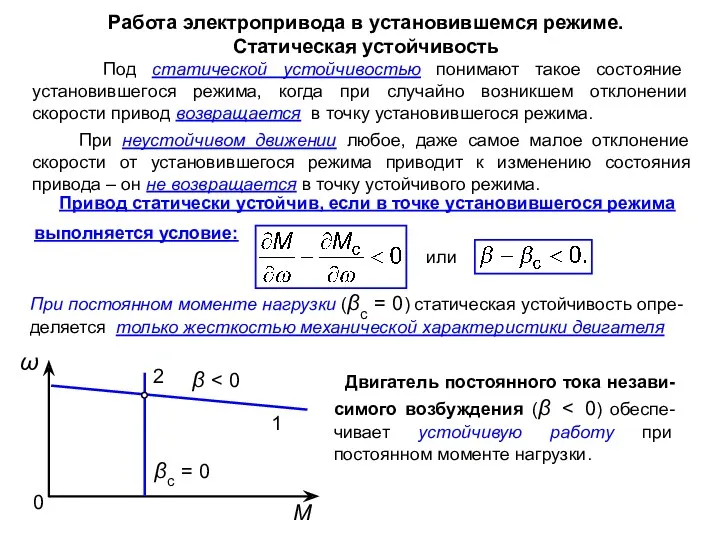
Под статической устойчивостью понимают
Работа электропривода в установившемся режиме. Статическая устойчивость
Под статической устойчивостью понимают
Работа электропривода в установившемся режиме. Статическая устойчивость
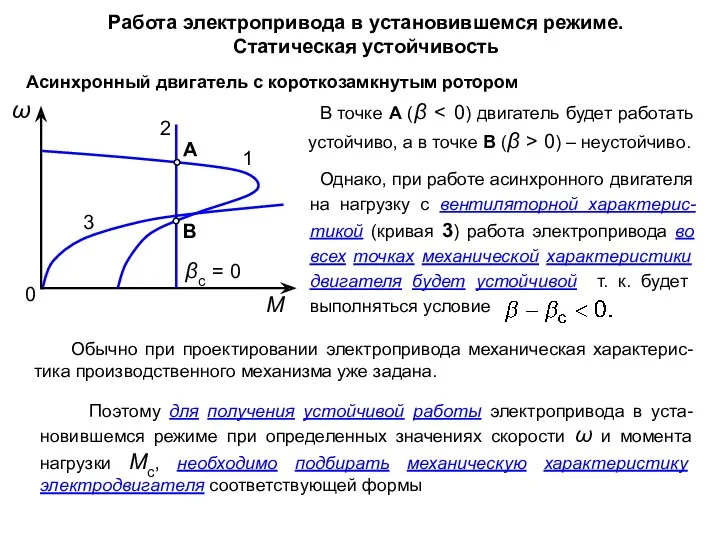
Асинхронный двигатель с короткозамкнутым ротором
Работа электропривода в установившемся режиме. Статическая устойчивость
Асинхронный двигатель с короткозамкнутым ротором
Уравнение движения электропривода
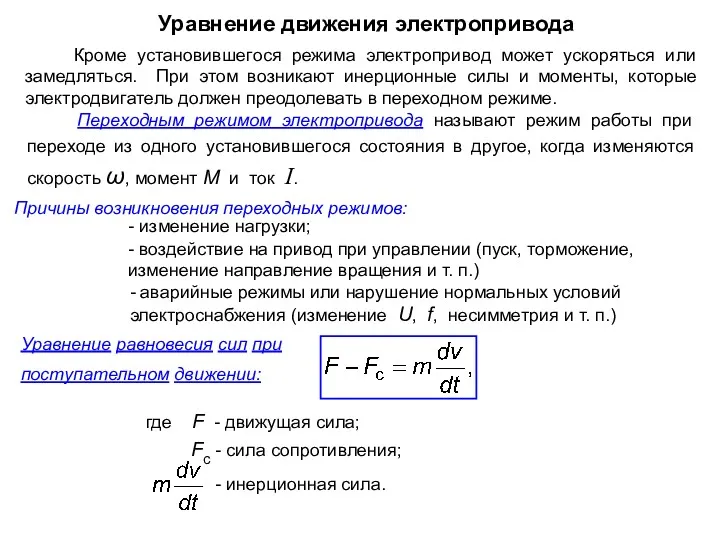
Кроме установившегося режима электропривод может ускоряться или замедляться.
Уравнение движения электропривода
Кроме установившегося режима электропривод может ускоряться или замедляться.
Уравнение движения электропривода
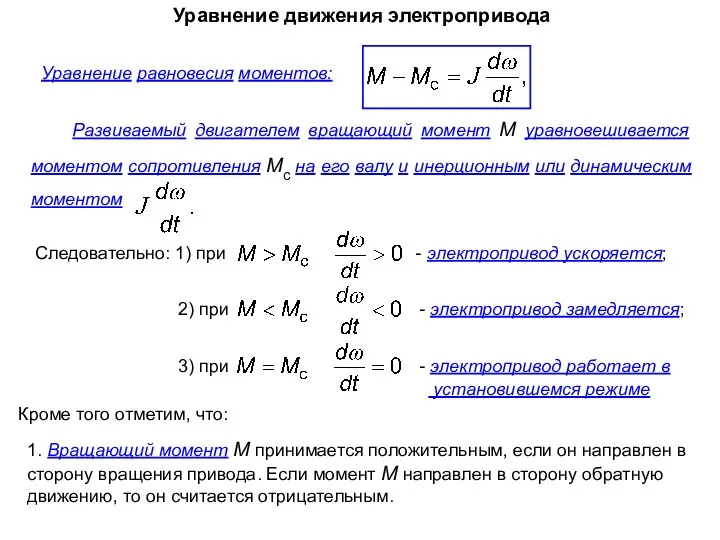
1. Вращающий момент М принимается положительным, если он направлен
Уравнение движения электропривода
1. Вращающий момент М принимается положительным, если он направлен
 Квалификационная работа. Cистема управления технологическим процессом травления
Квалификационная работа. Cистема управления технологическим процессом травления Эмбриология человека
Эмбриология человека Открытка с 8 марта
Открытка с 8 марта Костюм эпохи Возрождения
Костюм эпохи Возрождения Развитие женских половых органов
Развитие женских половых органов Презентация по географическому краеведению Растительность Нижегородской области
Презентация по географическому краеведению Растительность Нижегородской области Методическая разработка раздела программы по географии. 7 класс. Тема: АВСТРАЛИЯ И ОКЕАНИЯ.
Методическая разработка раздела программы по географии. 7 класс. Тема: АВСТРАЛИЯ И ОКЕАНИЯ. Виды промышленных предприятий водного транспорта. Лекция 3
Виды промышленных предприятий водного транспорта. Лекция 3 кубанские казаки в войне 1812 года
кубанские казаки в войне 1812 года Материалы по теме месяца
Материалы по теме месяца презентация Русский танец
презентация Русский танец Степени с рациональными показателями, их свойства
Степени с рациональными показателями, их свойства Дисграфия оптическая и моторная
Дисграфия оптическая и моторная Вопросы по биологии растений, грибов, бактерий, животных
Вопросы по биологии растений, грибов, бактерий, животных Технология сварки высоколегированной нержавеющей стали. Билет 12
Технология сварки высоколегированной нержавеющей стали. Билет 12 Скорость химических реакций
Скорость химических реакций Государственная социальная стипендия
Государственная социальная стипендия Викторина Маленькие герои большой войны
Викторина Маленькие герои большой войны Современные подходы к лечению шизофрении
Современные подходы к лечению шизофрении Театр. Балет. Опера. Драма
Театр. Балет. Опера. Драма Свет как экологический фактор
Свет как экологический фактор Презентация к уроку географии 5 класс. Погода и метеорологические наблюдения.
Презентация к уроку географии 5 класс. Погода и метеорологические наблюдения. Программа деятельности Муниципального координационного центра Одаренные дети
Программа деятельности Муниципального координационного центра Одаренные дети презентация к элективному занятию по теме Элементы комбинаторики (правило суммы и произведения)
презентация к элективному занятию по теме Элементы комбинаторики (правило суммы и произведения) Методические разработки уроков,статьи
Методические разработки уроков,статьи Основы устройства малых космических аппаратов
Основы устройства малых космических аппаратов Регистры. Определение, применение, состав, виды
Регистры. Определение, применение, состав, виды 1 сентября
1 сентября