- Системы автоматического управления

Содержание
- 2. Системой автоматического управления (САУ) называют совокупность объекта управления и автоматического управляющего устройства, действующих как одно целое
- 3. САУ: Тема 4. «Системы автоматического управления»
- 4. Принципы построения САУ САУ строят на основе трех фундаментальных ПРИНЦИПОВ УПРАВЛЕНИЯ 1 ПРИНЦИП - разомкнутого управления
- 5. ВИДЫ САУ В соответствии с принципами управления различают САУ 1 САУ с разомкнутой цепью управления 2
- 6. САУ с РАЗОМКНУТОЙ ЦЕПЬЮ Функциональная блок-схема САУ ЗАФ – задатчик алгоритма функционирования (задает закон изменения входного
- 7. САУ с РАЗОМКНУТОЙ ЦЕПЬЮ 1. Алгоритм функционирования и алгоритм управления совпадают Тема 4. «Системы автоматического управления»
- 8. 1. tтребуемого подъема 2. tфактического подъема 3. кожух 4. двигатель 5. барабан 6. трос 7. контактор
- 9. ПРИМЕР выбора параметров кинематической схемы Тема 4. «Системы автоматического управления» ПОДБЕРЕМ КИНЕМАТИЧЕСКУЮ СХЕМУ tк=10сек. (Х) Подбираем
- 10. ПРИМЕР выбора параметров кинематической схемы Тема 4. «Системы автоматического управления» ПЕРЕСЧЕТ ПАРАМЕТРОВ СХЕМЫ tкф = 10,6
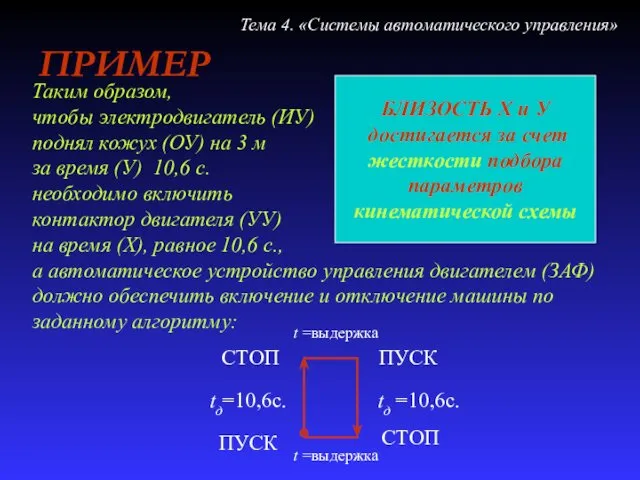
- 11. ПРИМЕР Тема 4. «Системы автоматического управления» Таким образом, чтобы электродвигатель (ИУ) поднял кожух (ОУ) на 3
- 12. ПРИМЕР создания САУ с разомкнутой цепью управления Тема 4. «Системы автоматического управления» SB1- кнопка замыкающая с
- 13. САУ с разомкнутой цепью управления различают По степени централизации 1.1 - централизованные 1.2 - децентрализованные 1.3
- 14. 1.1 ЦЕНТРАЛИЗОВАННАЯ САУ Осуществляет управление процессами функцией времени, т.е. каждая последующая команда подается через определенный интервал
- 15. 1.2 ДЕЦЕНТРАЛИЗОВАННАЯ САУ Осуществляет управление процессами функцией пути или по изменению какого-либо физического параметра (температуры, давления
- 16. 1.3 СМЕШАННАЯ САУ Осуществляет управление процессами функциями и времени, и пути. Управление общим циклом работы осуществляется
- 17. САУ Пассивного контроля Функциональная блок-схема САУ ЗАФ – задатчик алгоритма функционирования Тема 4. «Системы автоматического управления»
- 18. САУ с ЗАМКНУТОЙ ЦЕПЬЮ Функциональная блок-схема САУ СЭ – сравнивающий элемент Тема 4. «Системы автоматического управления»
- 19. По алгоритму функционирования 1.1 - стабилизирующие 1.2 - программы 1.3 - следящие По принципу действия 2.1
- 20. 1 по алгоритму функционирования 1.1 В системах стабилизации поддерживается постоянное значение выходного параметра, поэтому Х≈У=const. Например
- 21. 2 по принципу действия 2.1 В САУ прямого действия сигнал от измерительного элемента непосредственно передается управляющему
- 22. 3.1 Статические САУ Имеют жесткую связь между значением управляемого параметра и положением регулирующего органа, кроме того,
- 23. ИУ – изменяет положение РО (поплавок и рычаг) ПРИМЕР статической САУ Тема 4. «Системы автоматического управления»
- 24. ИЭ – поплавковый уровнемер (поплавок + датчик (реостат)) и потенциометрический двухтактный датчик (резистор, включенный по схеме
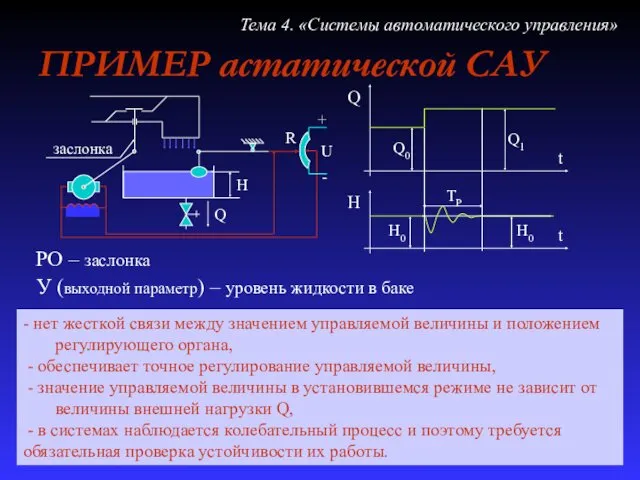
- 25. ПРИМЕР астатической САУ Тема 4. «Системы автоматического управления» РО – заслонка У (выходной параметр) – уровень
- 26. САУ с ЦЕПЬЮ КОМПЕНСАЦИИ Функциональная блок-схема САУ f0(t) – заданное значение внешнего возмущения Тема 4. «Системы
- 28. Скачать презентацию
Системой автоматического
управления (САУ)
называют совокупность объекта управления и автоматического управляющего устройства,
Системой автоматического
управления (САУ)
называют совокупность объекта управления и автоматического управляющего устройства,
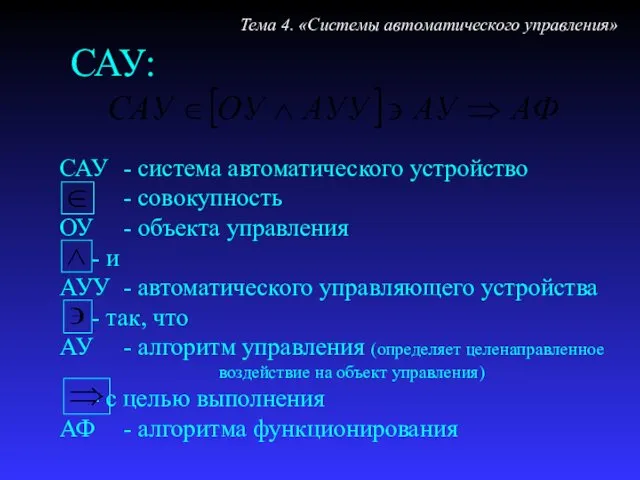
САУ:
Тема 4. «Системы автоматического управления»
САУ:
Тема 4. «Системы автоматического управления»
Принципы построения САУ
САУ строят на основе трех фундаментальных ПРИНЦИПОВ УПРАВЛЕНИЯ
1 ПРИНЦИП
Принципы построения САУ
САУ строят на основе трех фундаментальных ПРИНЦИПОВ УПРАВЛЕНИЯ
1 ПРИНЦИП
ВИДЫ САУ
В соответствии с принципами управления различают САУ
1 САУ с разомкнутой
ВИДЫ САУ
В соответствии с принципами управления различают САУ
1 САУ с разомкнутой
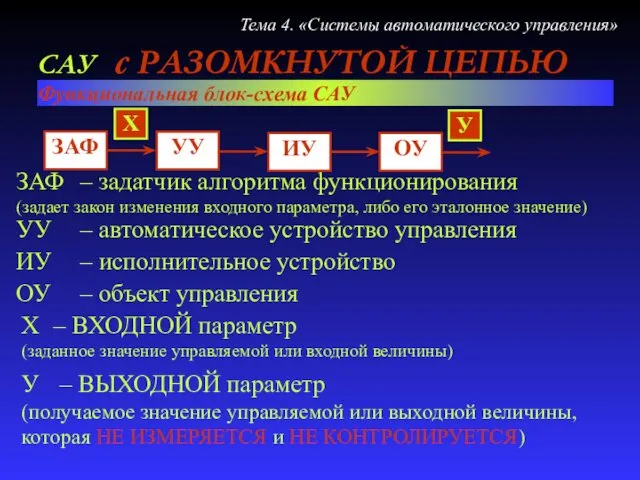
САУ с РАЗОМКНУТОЙ ЦЕПЬЮ
Функциональная блок-схема САУ
ЗАФ – задатчик алгоритма функционирования
(задает закон
САУ с РАЗОМКНУТОЙ ЦЕПЬЮ
Функциональная блок-схема САУ
ЗАФ – задатчик алгоритма функционирования (задает закон
САУ с РАЗОМКНУТОЙ ЦЕПЬЮ
1. Алгоритм функционирования и алгоритм управления совпадают
Тема 4. «Системы
САУ с РАЗОМКНУТОЙ ЦЕПЬЮ
1. Алгоритм функционирования и алгоритм управления совпадают
Тема 4. «Системы
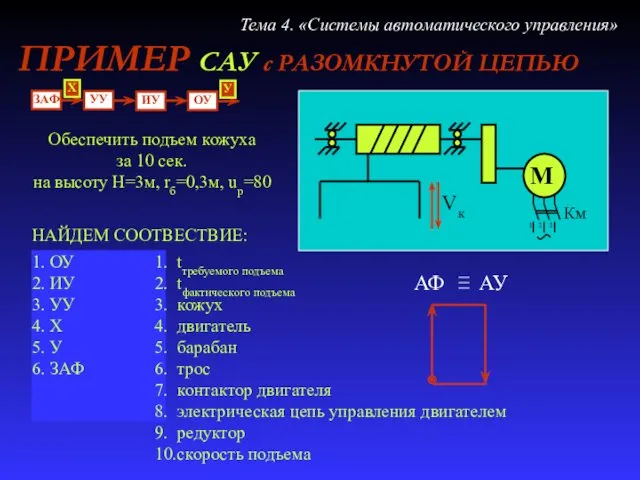
1. tтребуемого подъема
2. tфактического подъема
3. кожух
4. двигатель
5. барабан
6. трос
7.
1. tтребуемого подъема 2. tфактического подъема 3. кожух 4. двигатель 5. барабан 6. трос 7.

ПРИМЕР выбора параметров кинематической схемы
Тема 4. «Системы автоматического управления»
ПОДБЕРЕМ КИНЕМАТИЧЕСКУЮ
ПРИМЕР выбора параметров кинематической схемы
Тема 4. «Системы автоматического управления»
ПОДБЕРЕМ КИНЕМАТИЧЕСКУЮ
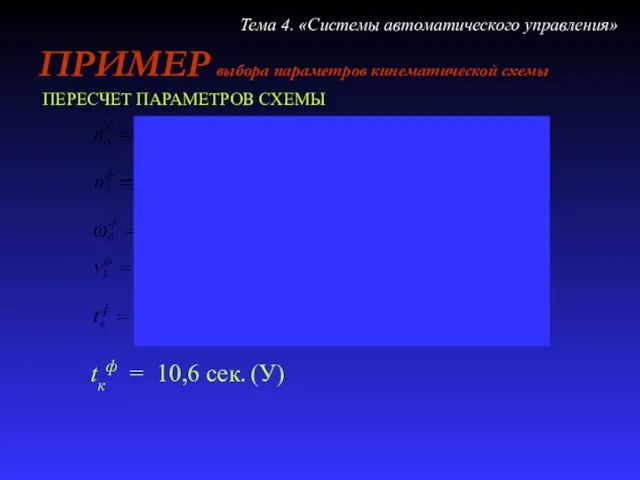
ПРИМЕР выбора параметров кинематической схемы
Тема 4. «Системы автоматического управления»
ПЕРЕСЧЕТ ПАРАМЕТРОВ
ПРИМЕР выбора параметров кинематической схемы
Тема 4. «Системы автоматического управления»
ПЕРЕСЧЕТ ПАРАМЕТРОВ
ПРИМЕР
Тема 4. «Системы автоматического управления»
Таким образом,
чтобы электродвигатель (ИУ)
поднял кожух
ПРИМЕР
Тема 4. «Системы автоматического управления»
Таким образом, чтобы электродвигатель (ИУ) поднял кожух

ПРИМЕР создания САУ с разомкнутой цепью управления
Тема 4. «Системы автоматического управления»
SB1-
ПРИМЕР создания САУ с разомкнутой цепью управления
Тема 4. «Системы автоматического управления»
SB1-
САУ с разомкнутой цепью управления различают
По степени централизации
1.1 - централизованные
1.2 - децентрализованные
1.3 -
САУ с разомкнутой цепью управления различают
По степени централизации
1.1 - централизованные
1.2 - децентрализованные
1.3 -
1.1 ЦЕНТРАЛИЗОВАННАЯ САУ
Осуществляет управление процессами функцией времени, т.е. каждая последующая команда
1.1 ЦЕНТРАЛИЗОВАННАЯ САУ
Осуществляет управление процессами функцией времени, т.е. каждая последующая команда
1.2 ДЕЦЕНТРАЛИЗОВАННАЯ САУ
Осуществляет управление процессами функцией пути или по изменению какого-либо
1.2 ДЕЦЕНТРАЛИЗОВАННАЯ САУ
Осуществляет управление процессами функцией пути или по изменению какого-либо
1.3 СМЕШАННАЯ САУ
Осуществляет управление процессами функциями и времени, и пути. Управление
1.3 СМЕШАННАЯ САУ
Осуществляет управление процессами функциями и времени, и пути. Управление
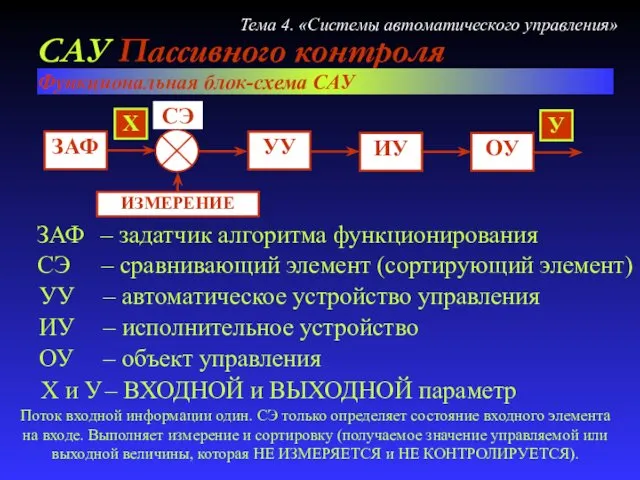
САУ Пассивного контроля
Функциональная блок-схема САУ
ЗАФ – задатчик алгоритма функционирования
Тема 4. «Системы
САУ Пассивного контроля
Функциональная блок-схема САУ
ЗАФ – задатчик алгоритма функционирования
Тема 4. «Системы
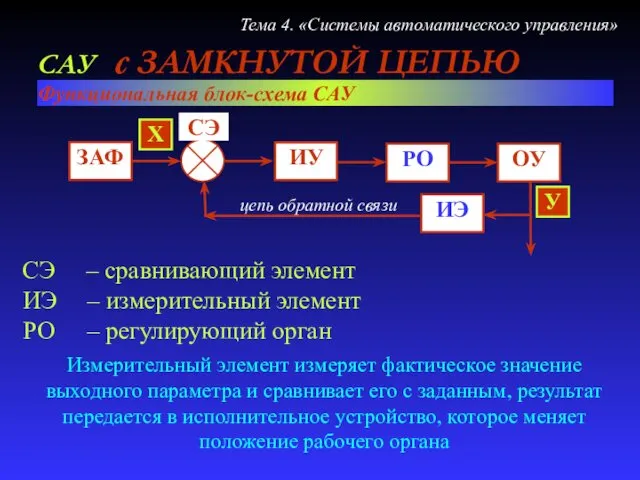
САУ с ЗАМКНУТОЙ ЦЕПЬЮ
Функциональная блок-схема САУ
СЭ – сравнивающий элемент
Тема 4. «Системы
САУ с ЗАМКНУТОЙ ЦЕПЬЮ
Функциональная блок-схема САУ
СЭ – сравнивающий элемент
Тема 4. «Системы
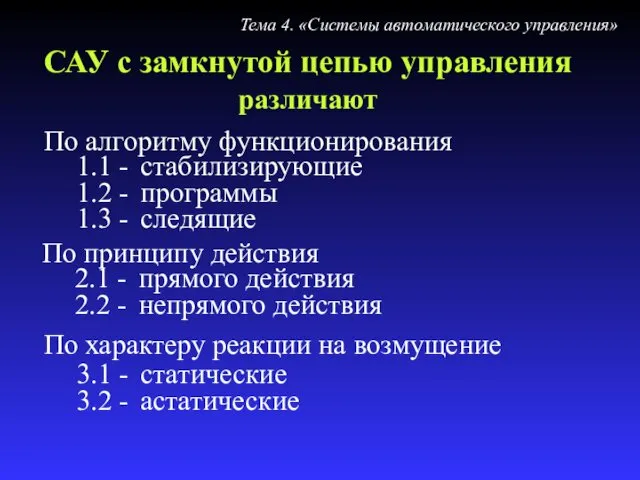
По алгоритму функционирования
1.1 - стабилизирующие
1.2 - программы
1.3 - следящие
По принципу действия
2.1 - прямого действия
2.2
По алгоритму функционирования
1.1 - стабилизирующие
1.2 - программы
1.3 - следящие
По принципу действия
2.1 - прямого действия
2.2
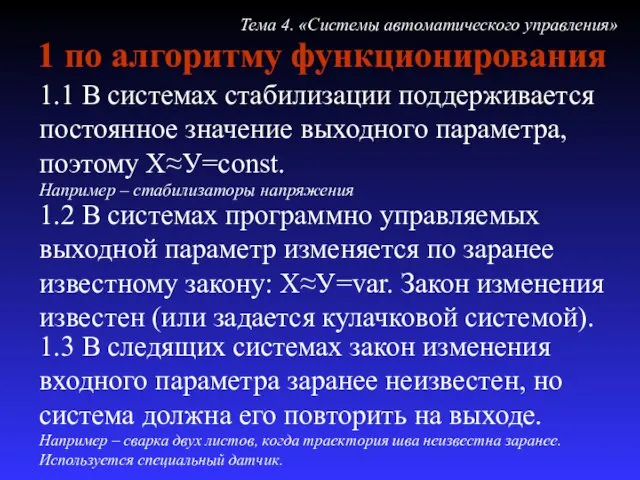
1 по алгоритму функционирования
1.1 В системах стабилизации поддерживается постоянное значение выходного
1 по алгоритму функционирования
1.1 В системах стабилизации поддерживается постоянное значение выходного
2 по принципу действия
2.1 В САУ прямого действия сигнал от измерительного
2 по принципу действия
2.1 В САУ прямого действия сигнал от измерительного
3.1 Статические САУ
Имеют жесткую связь между значением управляемого параметра и положением
3.1 Статические САУ
Имеют жесткую связь между значением управляемого параметра и положением
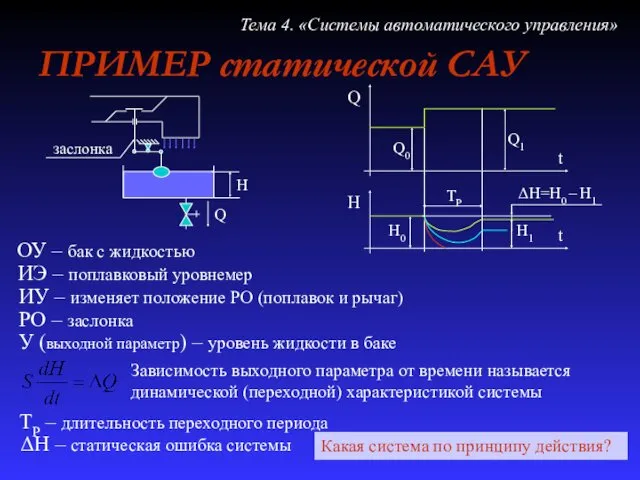
ИУ – изменяет положение РО (поплавок и рычаг)
ПРИМЕР статической САУ
Тема 4.
ИУ – изменяет положение РО (поплавок и рычаг)
ПРИМЕР статической САУ
Тема 4.
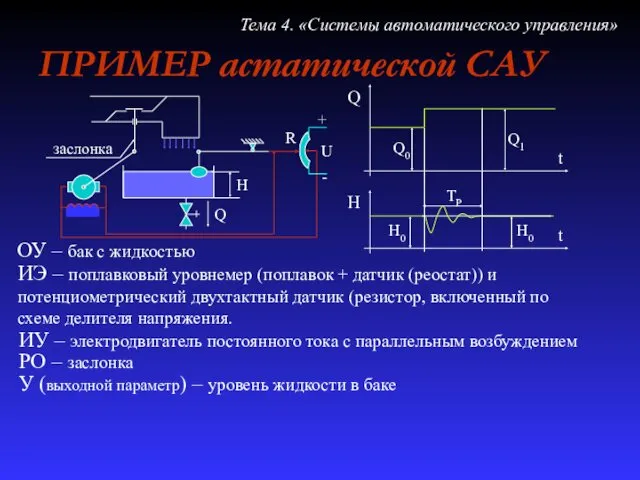
ИЭ – поплавковый уровнемер (поплавок + датчик (реостат)) и потенциометрический двухтактный
ИЭ – поплавковый уровнемер (поплавок + датчик (реостат)) и потенциометрический двухтактный
ПРИМЕР астатической САУ
Тема 4. «Системы автоматического управления»
РО – заслонка
У (выходной параметр)
ПРИМЕР астатической САУ
Тема 4. «Системы автоматического управления»
РО – заслонка
У (выходной параметр)
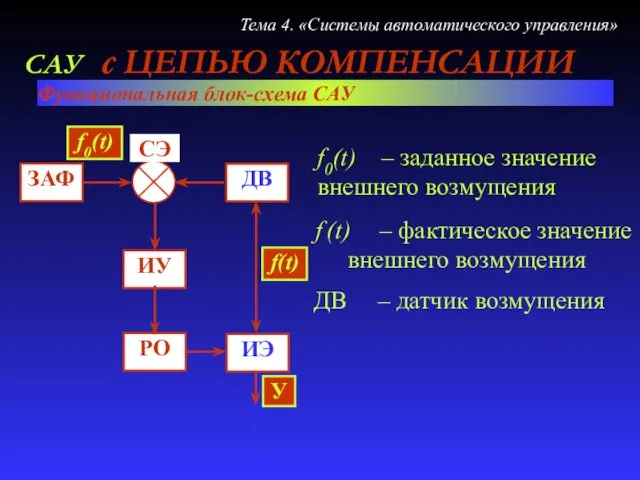
САУ с ЦЕПЬЮ КОМПЕНСАЦИИ
Функциональная блок-схема САУ
f0(t) – заданное значение внешнего возмущения
Тема
САУ с ЦЕПЬЮ КОМПЕНСАЦИИ
Функциональная блок-схема САУ
f0(t) – заданное значение внешнего возмущения
Тема
 Заболеваемость протозоозами в РФ и РК
Заболеваемость протозоозами в РФ и РК Религиоведение. Тема 5. Буддизм: история становления, концепции, течения
Религиоведение. Тема 5. Буддизм: история становления, концепции, течения Тренинг по эвакуации и безопасности
Тренинг по эвакуации и безопасности Сестринская помощь при ишурии (острая задержка мочи)
Сестринская помощь при ишурии (острая задержка мочи) Учебная практика. Общественные отношения, подпадающие под воздействие норм публичного и частного права
Учебная практика. Общественные отношения, подпадающие под воздействие норм публичного и частного права Кезеңді медициналық қарауы ұйымдастырудағы еңбек гигиенасы дәрігерінің рөлі
Кезеңді медициналық қарауы ұйымдастырудағы еңбек гигиенасы дәрігерінің рөлі И.С.Тургенев Бежин луг. Портреты
И.С.Тургенев Бежин луг. Портреты Буржуазная революция в Нидерландах. Восьмидесятилетняя война. (1568 — январь 1648)
Буржуазная революция в Нидерландах. Восьмидесятилетняя война. (1568 — январь 1648) Готика
Готика Знакомство с фразеологизмом Лезть на рожон
Знакомство с фразеологизмом Лезть на рожон История создания Вооруженных сил РФ
История создания Вооруженных сил РФ Геодезические изыскания при проведении реконструкции линейного объекта
Геодезические изыскания при проведении реконструкции линейного объекта Прогулка в детство. Друзьям и всем Новокубанцам с любовью посвящаю
Прогулка в детство. Друзьям и всем Новокубанцам с любовью посвящаю физ.минутки на уроках
физ.минутки на уроках Шаблон для презентации 1 сентября - День Знаний
Шаблон для презентации 1 сентября - День Знаний Животные и птицы Ивановского зоопарка
Животные и птицы Ивановского зоопарка Костромская Голгофа
Костромская Голгофа AndroidManifest, сборка и ресурсы
AndroidManifest, сборка и ресурсы Инновационный проект Разработка ВЭУ
Инновационный проект Разработка ВЭУ Культивирование жемчуга
Культивирование жемчуга Южные материки
Южные материки Голодомор 1932-1933 років. Геноцид українського народу
Голодомор 1932-1933 років. Геноцид українського народу Согласное и несогласное залегание слоев
Согласное и несогласное залегание слоев Холодильное оборудование
Холодильное оборудование Презентация Исторический музей
Презентация Исторический музей Шиврин Олег Николаевич (1923-1990)
Шиврин Олег Николаевич (1923-1990) Инвестиционные проекты в нефтегазохимическом комплексе РТ
Инвестиционные проекты в нефтегазохимическом комплексе РТ Учнівське портфоліо Гончарової Олени Сергіївни
Учнівське портфоліо Гончарової Олени Сергіївни