- Системы самонаведения и динамика систем самонаведения

Содержание
- 2. Система самонаведения — совокупность устройств, предназначенных для автономного вывода метательного снаряда на цель и минимизации отклонения
- 3. Головка самонаведения (ГСН) — элемент системы самонаведения, аппаратура которого размещена в носовой части ракеты или снаряда.
- 4. Система самонаведения изначально может не иметь информации о положении цели — в этом случае говорят о
- 7. РЛ ГСН представляет собой радиолокационную станцию 3-х сантиметрового диапазона, работающую в режиме импульсного излучения. При самом
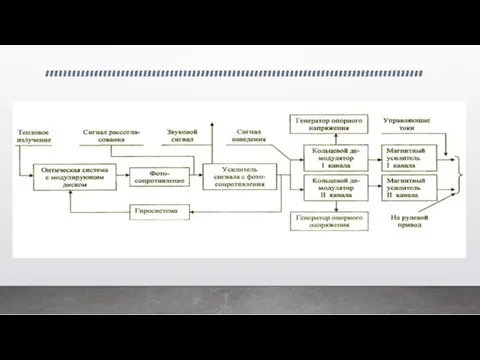
- 8. Автоматическая часть станции состоит из трех следующих функциональных систем: Системы управления антенной, обеспечивающей управление антенной во
- 9. Отдельные функциональные системы РЛ ГСН РЛГС может быть разбита на ряд отдельных функциональных систем, каждая из
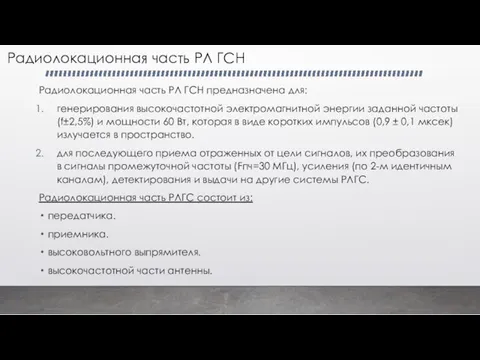
- 10. Радиолокационная часть РЛ ГСН Радиолокационная часть РЛ ГСН предназначена для: генерирования высокочастотной электромагнитной энергии заданной частоты
- 11. Синхронизатор Назначением этой части РЛ ГСН является: формирование импульсов синхронизации для запуска отдельных схем в РЛГС
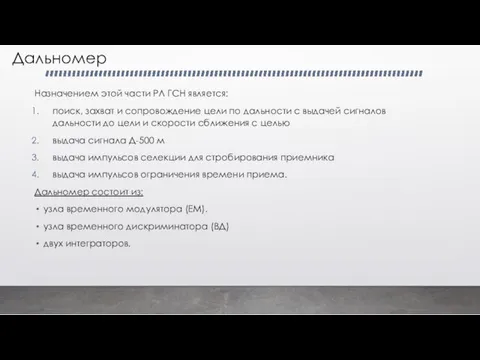
- 12. Дальномер Назначением этой части РЛ ГСН является: поиск, захват и сопровождение цели по дальности с выдачей
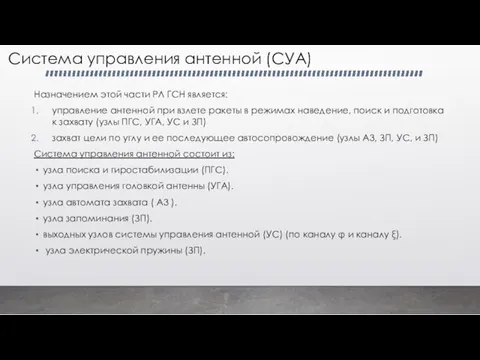
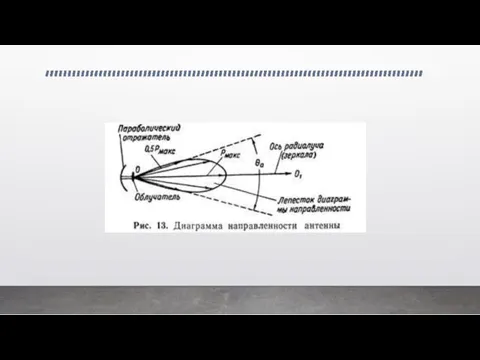
- 13. Система управления антенной (СУА) Назначением этой части РЛ ГСН является: управление антенной при взлете ракеты в
- 18. ИК ГСН — очень простой, дешевый и надежный способ наведения ракеты на цель. История теплового самонаведения
- 19. AIM-9 Sidewinder
- 20. I поколение ИК ГСН — односпектральные, одноэлементные (с одним точечным фотоприемником) и модуляционным (не мгновенным) способом
- 21. Принцип действия Оптическая система, представляющая собой зеркально-линзовый объектив, установленный на роторе гироскопа и вращающийся вместе с
- 23. Принцип работы ультрафиолетовой головки самонаведения аналогичен принципу работы инфракрасной ГСН, при том отличии, что используются волны
- 24. Используется в ПЗРК Стингер (Совместно с ИК ГСН)
- 25. Систем, подтверждено способных эффективно противодействовать ультрафиолетовым головкам самонаведения, в настоящее время не существует, что во многом
- 28. Скачать презентацию
Система самонаведения — совокупность устройств, предназначенных для автономного вывода метательного снаряда на
Система самонаведения — совокупность устройств, предназначенных для автономного вывода метательного снаряда на
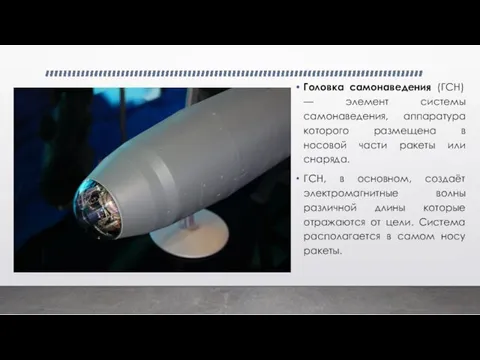
Головка самонаведения (ГСН) — элемент системы самонаведения, аппаратура которого размещена в
Головка самонаведения (ГСН) — элемент системы самонаведения, аппаратура которого размещена в
Система самонаведения изначально может не иметь информации о положении цели — в
Система самонаведения изначально может не иметь информации о положении цели — в
РЛ ГСН представляет собой радиолокационную станцию 3-х сантиметрового диапазона, работающую в
РЛ ГСН представляет собой радиолокационную станцию 3-х сантиметрового диапазона, работающую в
Автоматическая часть станции состоит из трех следующих функциональных систем:
Системы управления антенной,
Автоматическая часть станции состоит из трех следующих функциональных систем:
Системы управления антенной,
Отдельные функциональные системы РЛ ГСН
РЛГС может быть разбита на ряд отдельных
Отдельные функциональные системы РЛ ГСН
РЛГС может быть разбита на ряд отдельных
Радиолокационная часть РЛ ГСН
Радиолокационная часть РЛ ГСН предназначена для:
генерирования высокочастотной электромагнитной
Радиолокационная часть РЛ ГСН
Радиолокационная часть РЛ ГСН предназначена для:
генерирования высокочастотной электромагнитной

Синхронизатор
Назначением этой части РЛ ГСН является:
формирование импульсов синхронизации для запуска отдельных
Синхронизатор
Назначением этой части РЛ ГСН является:
формирование импульсов синхронизации для запуска отдельных
Дальномер
Назначением этой части РЛ ГСН является:
поиск, захват и сопровождение цели по
Дальномер
Назначением этой части РЛ ГСН является:
поиск, захват и сопровождение цели по
Система управления антенной (СУА)
Назначением этой части РЛ ГСН является:
управление антенной при
Система управления антенной (СУА)
Назначением этой части РЛ ГСН является:
управление антенной при

ИК ГСН — очень простой, дешевый и надежный способ наведения ракеты
ИК ГСН — очень простой, дешевый и надежный способ наведения ракеты
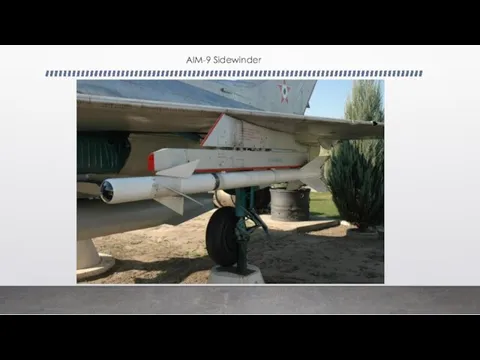
AIM-9 Sidewinder
AIM-9 Sidewinder

I поколение ИК ГСН — односпектральные, одноэлементные (с одним точечным фотоприемником)
I поколение ИК ГСН — односпектральные, одноэлементные (с одним точечным фотоприемником)
Принцип действия
Оптическая система, представляющая собой зеркально-линзовый объектив, установленный на роторе гироскопа и
Принцип действия
Оптическая система, представляющая собой зеркально-линзовый объектив, установленный на роторе гироскопа и
Принцип работы ультрафиолетовой головки самонаведения аналогичен принципу работы инфракрасной ГСН, при
Принцип работы ультрафиолетовой головки самонаведения аналогичен принципу работы инфракрасной ГСН, при

Используется в ПЗРК Стингер (Совместно с ИК ГСН)
Используется в ПЗРК Стингер (Совместно с ИК ГСН)

Систем, подтверждено способных эффективно противодействовать ультрафиолетовым головкам самонаведения, в настоящее время
Систем, подтверждено способных эффективно противодействовать ультрафиолетовым головкам самонаведения, в настоящее время

 Презентация Не дай себя в обиду!
Презентация Не дай себя в обиду! Дубровина Р.Ж. Урок СБО в 9 классе Сервировка праздничного стола, презентация
Дубровина Р.Ж. Урок СБО в 9 классе Сервировка праздничного стола, презентация Russian Federation
Russian Federation Effects of mesostructure on the in-plane properties of tufted carbon fabric composites
Effects of mesostructure on the in-plane properties of tufted carbon fabric composites Капитальный ремонт печи первичной метана
Капитальный ремонт печи первичной метана Парные согласные по звонкости и глухости
Парные согласные по звонкости и глухости Шаблоны презентаций Школьные
Шаблоны презентаций Школьные Рельеф России
Рельеф России Презентация: ата- аналар җыелышы
Презентация: ата- аналар җыелышы Технологии усиления оснований и фундаментов
Технологии усиления оснований и фундаментов Строительные материалы
Строительные материалы Классный час Семья.Семейные ценности
Классный час Семья.Семейные ценности Способы решения квадратных уравнений
Способы решения квадратных уравнений Строительно-монтажные работы при замене лифтового оборудования
Строительно-монтажные работы при замене лифтового оборудования Етилен і ацетилен – ненасичені вуглеводні
Етилен і ацетилен – ненасичені вуглеводні Галилео Галилей
Галилео Галилей Анализ разработки объекта ЮВ1(1) Северо-Варьеганского месторождения
Анализ разработки объекта ЮВ1(1) Северо-Варьеганского месторождения Святая царская семья
Святая царская семья Взаимное расположение прямых и плоскостей в пространстве
Взаимное расположение прямых и плоскостей в пространстве Презентация Три сойки
Презентация Три сойки музеи
музеи Сочинение по картине А.Н. Комарова Наводнение
Сочинение по картине А.Н. Комарова Наводнение конспект занятия я не песчинка, я - планета!
конспект занятия я не песчинка, я - планета! Ближний и Средний Восток. ХХ век
Ближний и Средний Восток. ХХ век Праздник осени
Праздник осени Сценарий классного часа Александр Невский - лицо России
Сценарий классного часа Александр Невский - лицо России Психоэмоциональное напряжение как фактор риска соматических заболеваний детей в условиях Арктического региона
Психоэмоциональное напряжение как фактор риска соматических заболеваний детей в условиях Арктического региона Понятие филэмбриогенезов. Практическая значимость для врача
Понятие филэмбриогенезов. Практическая значимость для врача