- Скоростной робот для соревнований. Следование по узкой линии

Содержание
- 2. Увеличение скорости робота может привести к тому, что на сложных траекториях, подвергаясь воздействию силы инерции, центробежной
- 3. Если робот в любом случае будет слетать с линии, то необходимо предусмотреть такой режим его поведения,
- 4. Как определить, когда робот ушел с линии вправо или влево. Необходимо установить два дополнительных датчика света
- 5. Диаграмма поведения робота будет выглядеть так: Блоки «Авария слева» и «Авария справа» – это подпрограммы, рассмотренные
- 6. Lego EV3, датчики света подключены ко всем портам. Модель робота – 2D модель. Физика – реалистичная
- 7. Отладка робота в Trik Studio Для отладки робота используем виртуального робота на основе двухмоторной тележки и
- 9. Скачать презентацию
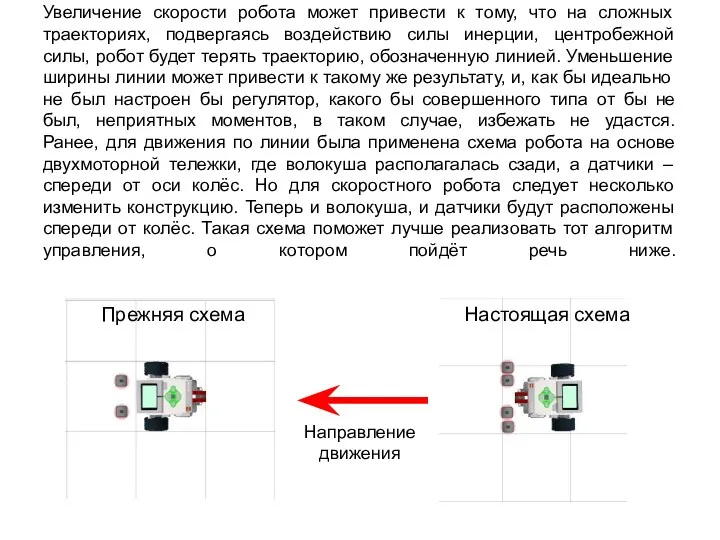
Увеличение скорости робота может привести к тому, что на сложных траекториях,
Увеличение скорости робота может привести к тому, что на сложных траекториях,
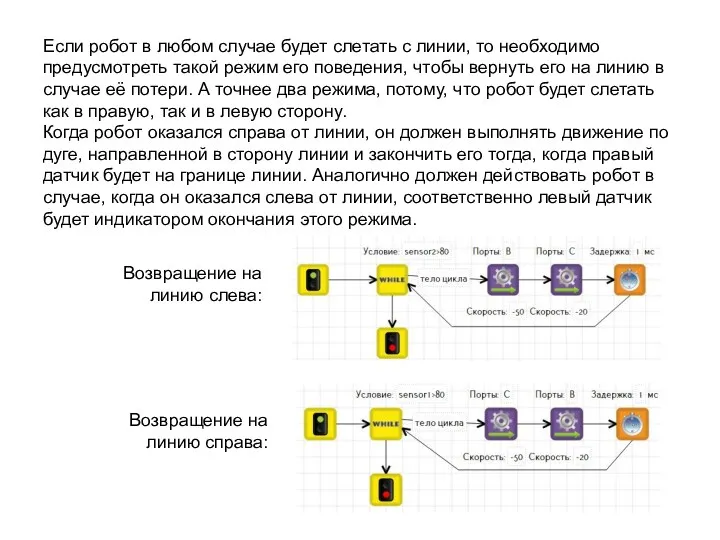
Если робот в любом случае будет слетать с линии, то необходимо
Если робот в любом случае будет слетать с линии, то необходимо
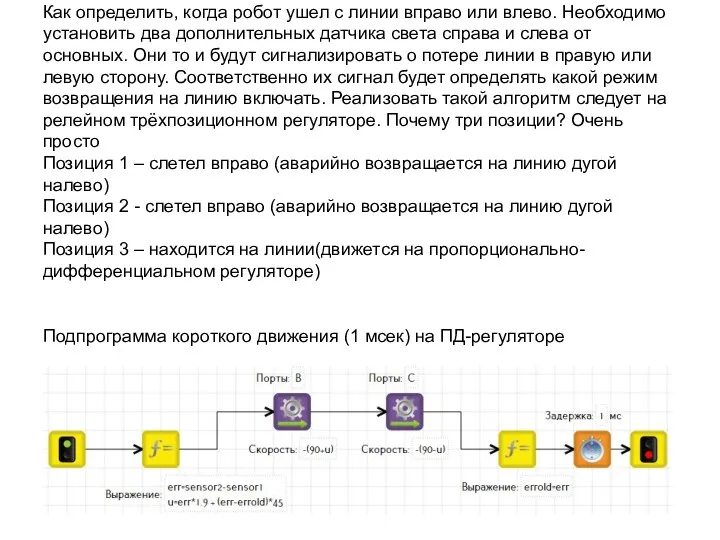
Как определить, когда робот ушел с линии вправо или влево. Необходимо
Как определить, когда робот ушел с линии вправо или влево. Необходимо

Диаграмма поведения робота будет выглядеть так:
Блоки «Авария слева» и «Авария справа»
Диаграмма поведения робота будет выглядеть так:
Блоки «Авария слева» и «Авария справа»
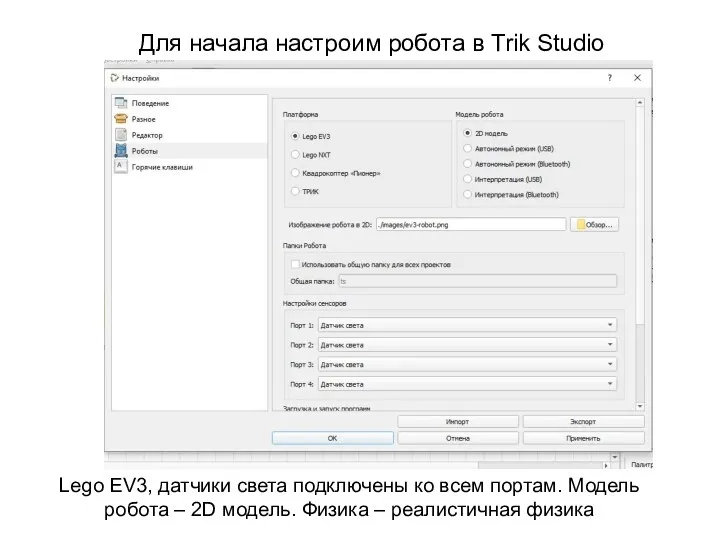
Lego EV3, датчики света подключены ко всем портам. Модель робота –
Lego EV3, датчики света подключены ко всем портам. Модель робота –

Отладка робота в Trik Studio
Для отладки робота используем виртуального робота на
Отладка робота в Trik Studio
Для отладки робота используем виртуального робота на
 Комикс-игра Нереальная сказка. Приключения новогодних игрушек. Найди своего персонажа и сочиняй свою историю
Комикс-игра Нереальная сказка. Приключения новогодних игрушек. Найди своего персонажа и сочиняй свою историю Жидкокристаллический индикатор (ЖКИ-LCD). Лекция 6
Жидкокристаллический индикатор (ЖКИ-LCD). Лекция 6 Тіл-жұтқыншақ нерві невралгиясы. Жоғарғы көмей нерв нейропатиясы. Тіласты нерві нейропатиясы
Тіл-жұтқыншақ нерві невралгиясы. Жоғарғы көмей нерв нейропатиясы. Тіласты нерві нейропатиясы Клиникалық басқарудағы пациентке жүргізген
Клиникалық басқарудағы пациентке жүргізген Переводы Библии
Переводы Библии 20-летие Российской Конституции
20-летие Российской Конституции ВКР: Модернизация системы контроля доступа для ООО “БИГАМ-Инвест
ВКР: Модернизация системы контроля доступа для ООО “БИГАМ-Инвест Кислоты. Свойства кислот
Кислоты. Свойства кислот Электронное портфолио учителя
Электронное портфолио учителя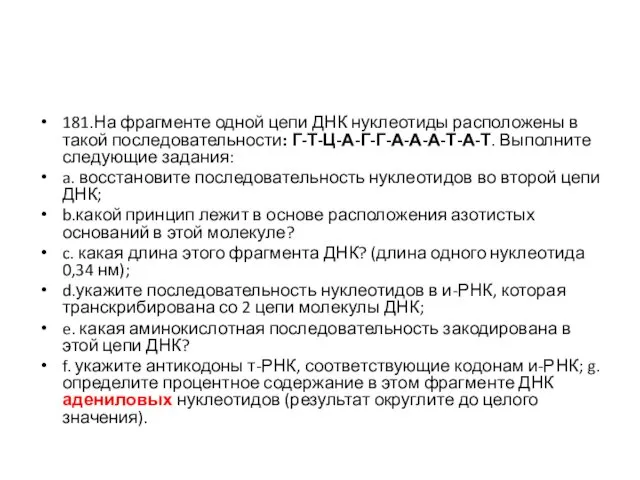 Молекулярная генетика. Задачи
Молекулярная генетика. Задачи Угадай мелодию
Угадай мелодию Создание теста через программу MyTest
Создание теста через программу MyTest Книга рекордов 5-х классов
Книга рекордов 5-х классов Фосфор, его характеристика, способы получения органопроизводных, химические свойства. Практическое применение
Фосфор, его характеристика, способы получения органопроизводных, химические свойства. Практическое применение Изучение правил прописи рецептов на мягкие лекарственные формы. Практическое занятие 3
Изучение правил прописи рецептов на мягкие лекарственные формы. Практическое занятие 3 Художественные и телевизионные фильмы о жизни А.С Пушкина
Художественные и телевизионные фильмы о жизни А.С Пушкина Презентация Географическое положение Северной Америки
Презентация Географическое положение Северной Америки Training Manual
Training Manual Золотые руки мамы
Золотые руки мамы Типы организационных структур управления
Типы организационных структур управления Подцарство простейшие
Подцарство простейшие Галиаскар Камал
Галиаскар Камал Сосудистый шов: базовые принципы
Сосудистый шов: базовые принципы Схема расположения элемента планировочной структуры
Схема расположения элемента планировочной структуры Архитектура и живопись Средневековья
Архитектура и живопись Средневековья Презентация к уроку чтение. Тема: Звук [ м ] и буква М,м.
Презентация к уроку чтение. Тема: Звук [ м ] и буква М,м. Молекулярно-кинетическая теория. Идеальный газ. Уравнение молекулярно-кинетической теории идеального газа. Закон Дальтона
Молекулярно-кинетическая теория. Идеальный газ. Уравнение молекулярно-кинетической теории идеального газа. Закон Дальтона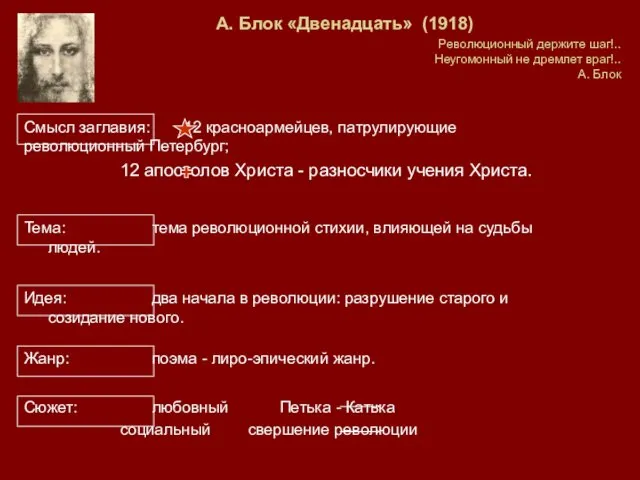 А. Блок, поэма Двенадцать (1918)
А. Блок, поэма Двенадцать (1918)