- Согласованный фильтр

Содержание
- 2. СХЕМЫ КОРРЕЛЯТОРА И СФ (предыдущая лекция)
- 3. СФ КАК КОРРЕЛЯТОР 1.Отношение сигнал/шум на выходе СФ при t=t0 равно отношению сигнал/шум на выходе коррелятора
- 4. ПЛОТНОСТЬ РАСПРЕДЕЛЕНИЯ ВЕРОЯТНОСТЕЙ СИГНАЛА НА ВЫХОДЕ СФ ПРВ сечения СП: СФ является НЧ фильтром, в котором
- 5. H1: ПЛОТНОСТЬ РАСПРЕДЕЛЕНИЯ ВЕРОЯТНОСТЕЙ СИГНАЛА НА ВЫХОДЕ СФ H0: yвых
- 6. СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ ПРИ НЕБЕЛОМ ШУМЕ
- 7. СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ ПРИ НЕБЕЛОМ ШУМЕ СПМ аддитивного шума : Наблюдаемый сигнал: «Выбеливающий» линейный фильтр преобразует окрашенный
- 8. СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ ПРИ НЕБЕЛОМ ШУМЕ Реакция «выбеливающего» фильтра: СФ для sвх (t) Выб. фильтр СФ для
- 9. КЧХ фильтра, согласованного с s1(t) –длительность сигнала АЧХ «выбеливающего» фильтра должна удовлетворять условию: СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ ПРИ
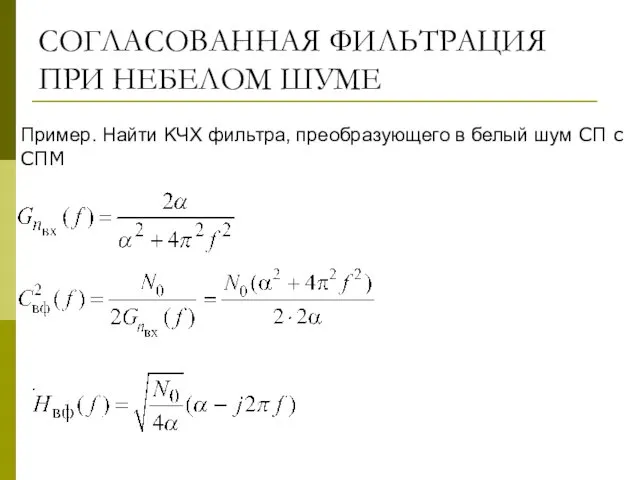
- 10. СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ ПРИ НЕБЕЛОМ ШУМЕ Пример. Найти KЧХ фильтра, преобразующего в белый шум СП с СПМ
- 11. Спектральная плотность сигнала на выходе «выбеливающего» фильтра: КЧХ фильтра, согласованного с s1(t) (шум - белый) КЧХ
- 12. Вывод: КЧХ СФ не зависит от ФЧХ выбеливающего фильтра СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ ПРИ НЕБЕЛОМ ШУМЕ Отношение сигнал/шум:
- 13. ОПТИМАЛЬНЫЕ ЛИНЕЙНЫЕ СИСТЕМЫ Критерий: минимум среднего квадрата ошибки
- 14. НОРБЕРТ ВИНЕР (1894−1964) Во время второй мировой войны перед американским математиком Н. Винером встала задача отделения
- 15. РУДОЛЬФ ЭМИЛЬ КАЛМАН (RUDOLPH EMIL KALMAN) (19.05.1930) Фильтра Калмана (конец 1958-го — начало 1959) - эффективный
- 16. ФИЛЬТР ВИНЕРА
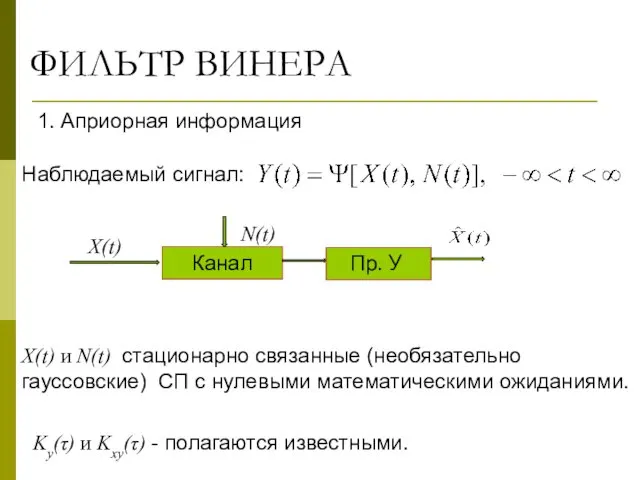
- 17. ФИЛЬТР ВИНЕРА Наблюдаемый сигнал: 1. Априорная информация X(t) и N(t) стационарно связанные (необязательно гауссовские) СП с
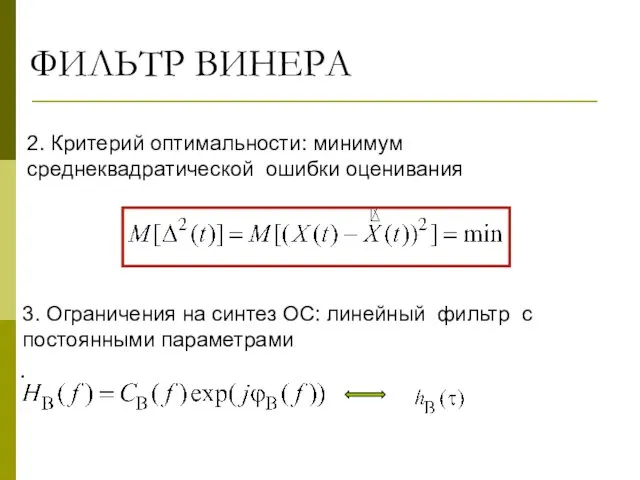
- 18. ФИЛЬТР ВИНЕРА 2. Критерий оптимальности: минимум среднеквадратической ошибки оценивания 3. Ограничения на синтез ОС: линейный фильтр
- 19. СИНТЕЗ НЕКАУЗАЛЬНОГО СТАЦИОНАРНОГО ЛФ - ИХ, минимизирующая СКО - произвольная ИХ ЛС
- 20. СИНТЕЗ НЕКАУЗАЛЬНОГО СТАЦИОНАРНОГО ЛФ
- 21. АНАЛИЗ ФИЛЬТРА ВИНЕРА
- 22. Для отыскания оптимальной линейной оценки необходимо знать только Ky(t) и Kxy(t) (или Gy(f) и Gxy(f) ).
- 23. Для всех гауссовских и негауссовских процессов, имеющих одинаковые Ky(t), Kx(t) и Kxy(t) , оптимальный линейный фильтр
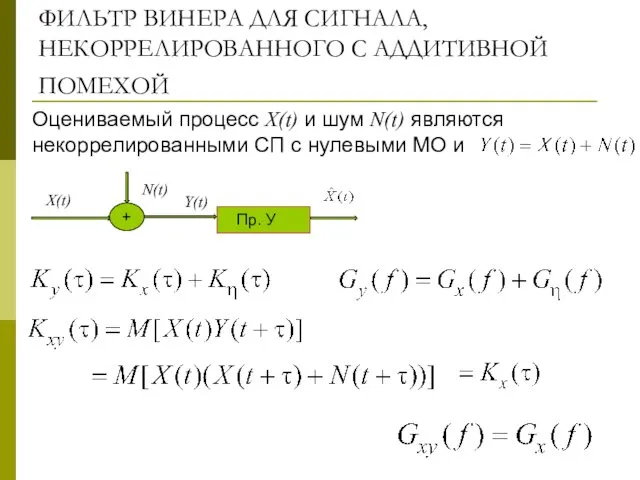
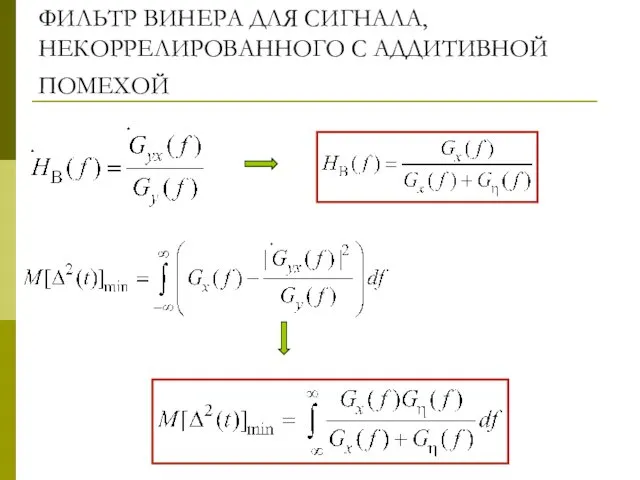
- 24. ФИЛЬТР ВИНЕРА ДЛЯ СИГНАЛА, НЕКОРРЕЛИРОВАННОГО С АДДИТИВНОЙ ПОМЕХОЙ Оцениваемый процесс X(t) и шум N(t) являются некоррелированными
- 25. ФИЛЬТР ВИНЕРА ДЛЯ СИГНАЛА, НЕКОРРЕЛИРОВАННОГО С АДДИТИВНОЙ ПОМЕХОЙ
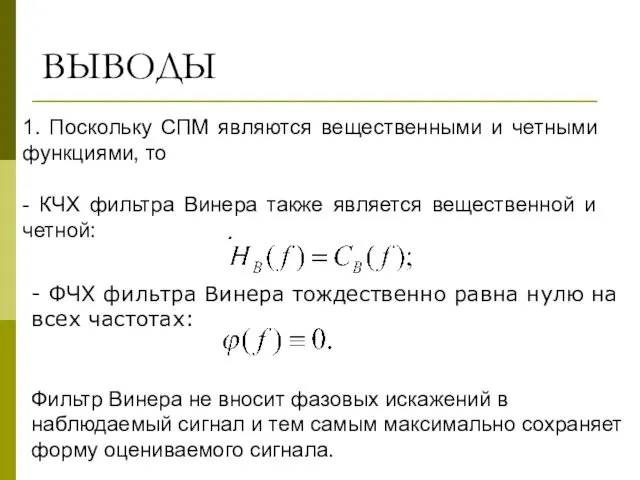
- 26. ВЫВОДЫ 1. Поскольку СПМ являются вещественными и четными функциями, то - КЧХ фильтра Винера также является
- 27. 2. f Gn(f) Gx(f) f 1 0.5 HВ(f) ВЫВОДЫ
- 28. 3. Импульсная характеристика фильтра Винера является четной функцией ВЫВОДЫ
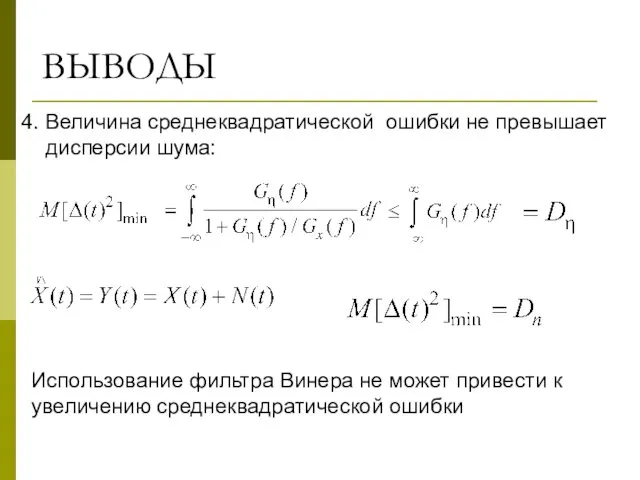
- 29. ВЫВОДЫ 4. Величина среднеквадратической ошибки не превышает дисперсии шума: Использование фильтра Винера не может привести к
- 30. 5. - при отсутствии шума; - СПМ сигнала и помехи не перекрываются на всех частотах. ВЫВОДЫ
- 32. Скачать презентацию
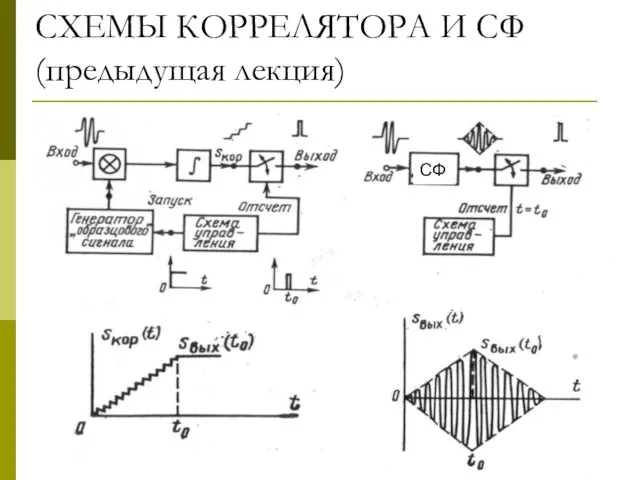
СХЕМЫ КОРРЕЛЯТОРА И СФ (предыдущая лекция)
СХЕМЫ КОРРЕЛЯТОРА И СФ (предыдущая лекция)
СФ КАК КОРРЕЛЯТОР
1.Отношение сигнал/шум на выходе СФ при t=t0 равно отношению
СФ КАК КОРРЕЛЯТОР
1.Отношение сигнал/шум на выходе СФ при t=t0 равно отношению
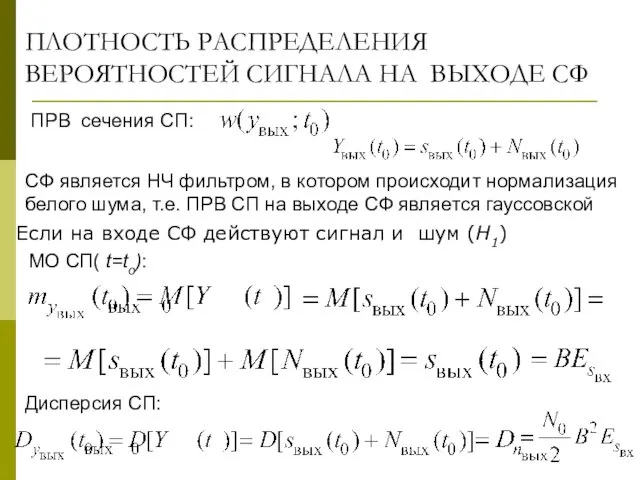
ПЛОТНОСТЬ РАСПРЕДЕЛЕНИЯ
ВЕРОЯТНОСТЕЙ СИГНАЛА НА ВЫХОДЕ СФ
ПРВ сечения СП:
СФ является
ПЛОТНОСТЬ РАСПРЕДЕЛЕНИЯ
ВЕРОЯТНОСТЕЙ СИГНАЛА НА ВЫХОДЕ СФ
ПРВ сечения СП:
СФ является
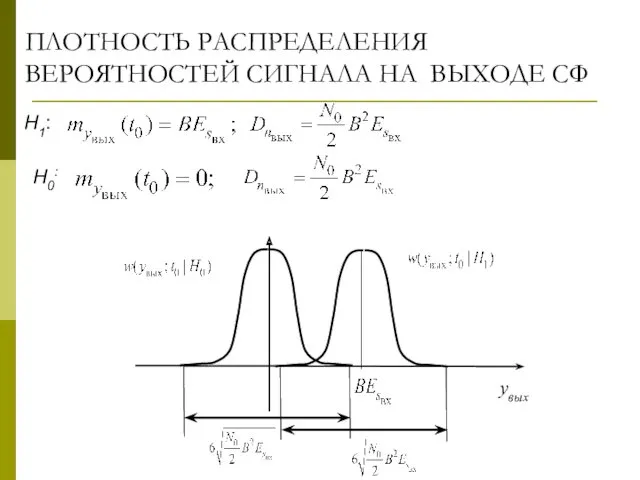
H1:
ПЛОТНОСТЬ РАСПРЕДЕЛЕНИЯ
ВЕРОЯТНОСТЕЙ СИГНАЛА НА ВЫХОДЕ СФ
H0:
yвых
H1:
ПЛОТНОСТЬ РАСПРЕДЕЛЕНИЯ
ВЕРОЯТНОСТЕЙ СИГНАЛА НА ВЫХОДЕ СФ
H0:
yвых
СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ
ПРИ НЕБЕЛОМ ШУМЕ
СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ
ПРИ НЕБЕЛОМ ШУМЕ
СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ
ПРИ НЕБЕЛОМ ШУМЕ
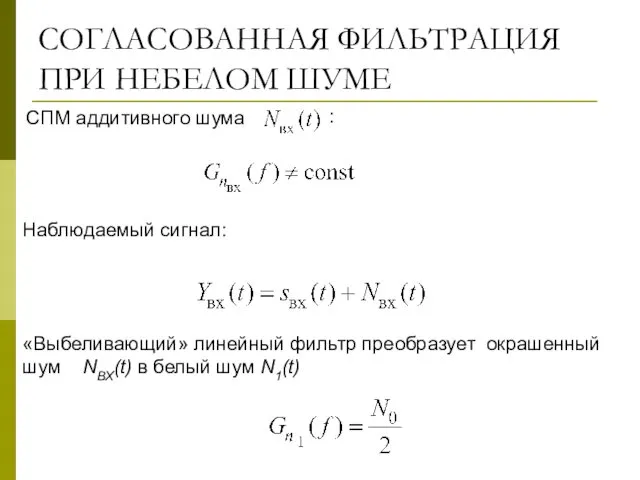
СПМ аддитивного шума
:
Наблюдаемый сигнал:
«Выбеливающий» линейный фильтр
СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ
ПРИ НЕБЕЛОМ ШУМЕ
СПМ аддитивного шума
:
Наблюдаемый сигнал:
«Выбеливающий» линейный фильтр
СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ
ПРИ НЕБЕЛОМ ШУМЕ
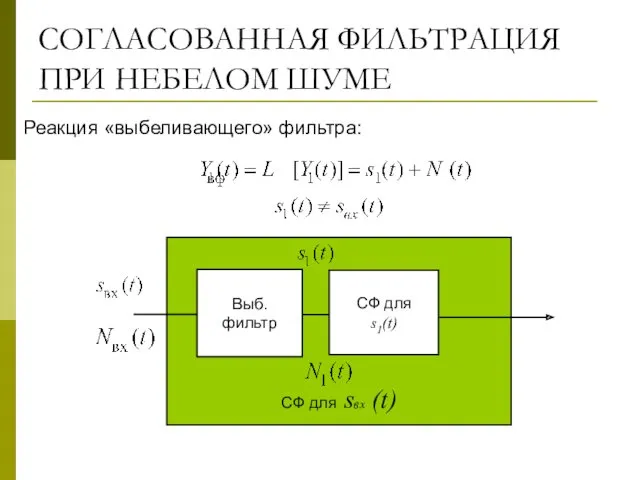
Реакция «выбеливающего» фильтра:
СФ для sвх (t)
Выб.
СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ
ПРИ НЕБЕЛОМ ШУМЕ
Реакция «выбеливающего» фильтра:
СФ для sвх (t)
Выб.
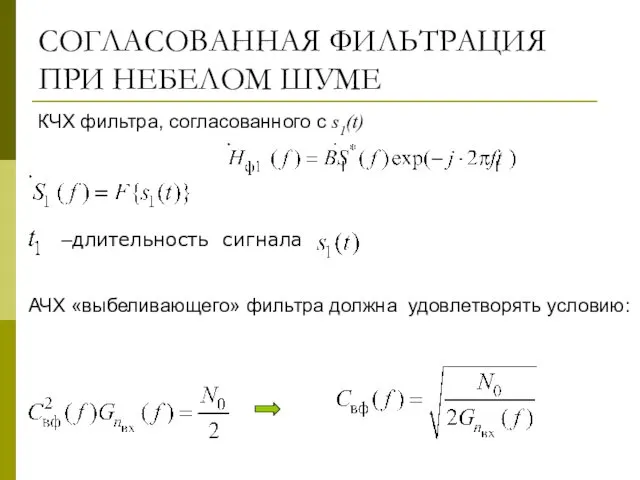
КЧХ фильтра, согласованного с s1(t)
–длительность сигнала
АЧХ «выбеливающего» фильтра должна удовлетворять условию:
КЧХ фильтра, согласованного с s1(t)
–длительность сигнала
АЧХ «выбеливающего» фильтра должна удовлетворять условию:
СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ
ПРИ НЕБЕЛОМ ШУМЕ
Пример. Найти KЧХ фильтра, преобразующего в белый
СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ
ПРИ НЕБЕЛОМ ШУМЕ
Пример. Найти KЧХ фильтра, преобразующего в белый
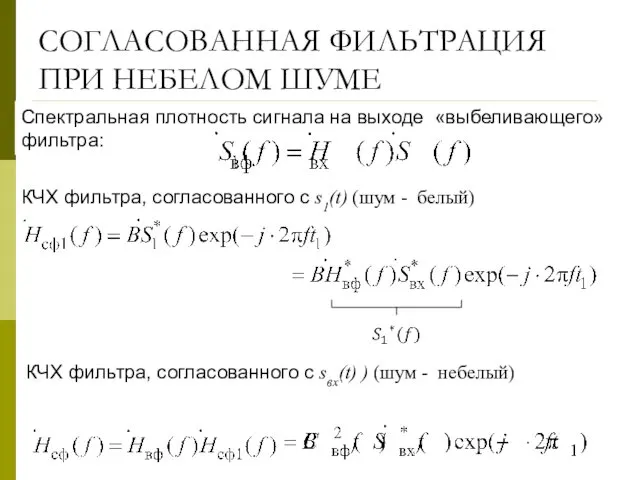
Спектральная плотность сигнала на выходе «выбеливающего» фильтра:
КЧХ фильтра, согласованного с
Спектральная плотность сигнала на выходе «выбеливающего» фильтра:
КЧХ фильтра, согласованного с
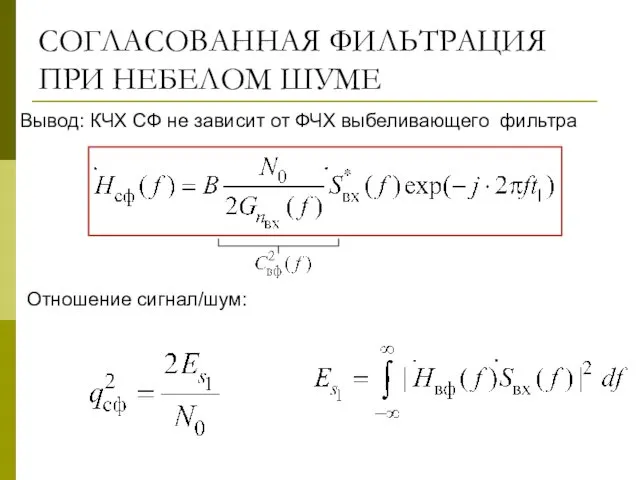
Вывод: КЧХ СФ не зависит от ФЧХ выбеливающего фильтра
СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ
ПРИ
Вывод: КЧХ СФ не зависит от ФЧХ выбеливающего фильтра
СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ ПРИ
ОПТИМАЛЬНЫЕ ЛИНЕЙНЫЕ СИСТЕМЫ
Критерий: минимум среднего квадрата ошибки
ОПТИМАЛЬНЫЕ ЛИНЕЙНЫЕ СИСТЕМЫ
Критерий: минимум среднего квадрата ошибки
НОРБЕРТ ВИНЕР (1894−1964)
Во время второй мировой войны перед американским математиком Н.
НОРБЕРТ ВИНЕР (1894−1964)
Во время второй мировой войны перед американским математиком Н.
РУДОЛЬФ ЭМИЛЬ КАЛМАН (RUDOLPH EMIL KALMAN) (19.05.1930)
Фильтра Калмана (конец 1958-го —
РУДОЛЬФ ЭМИЛЬ КАЛМАН (RUDOLPH EMIL KALMAN) (19.05.1930)
Фильтра Калмана (конец 1958-го —

ФИЛЬТР ВИНЕРА
ФИЛЬТР ВИНЕРА
ФИЛЬТР ВИНЕРА
Наблюдаемый сигнал:
1. Априорная информация
X(t) и N(t) стационарно связанные (необязательно гауссовские)
ФИЛЬТР ВИНЕРА
Наблюдаемый сигнал:
1. Априорная информация
X(t) и N(t) стационарно связанные (необязательно гауссовские)
ФИЛЬТР ВИНЕРА
2. Критерий оптимальности: минимум среднеквадратической ошибки оценивания
3. Ограничения на синтез
ФИЛЬТР ВИНЕРА
2. Критерий оптимальности: минимум среднеквадратической ошибки оценивания
3. Ограничения на синтез
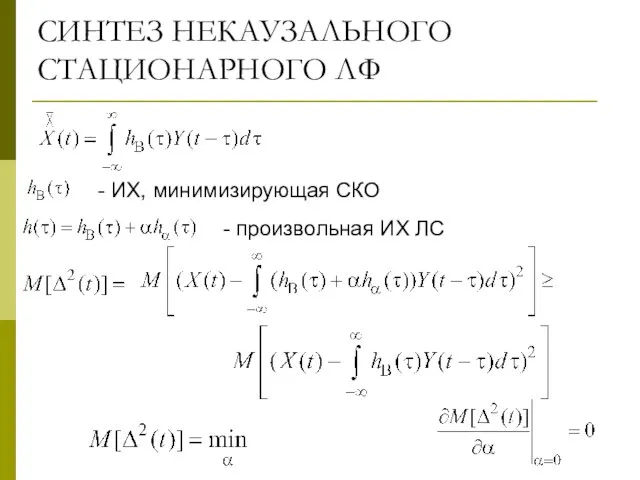
СИНТЕЗ НЕКАУЗАЛЬНОГО СТАЦИОНАРНОГО ЛФ
- ИХ, минимизирующая СКО
- произвольная ИХ ЛС
СИНТЕЗ НЕКАУЗАЛЬНОГО СТАЦИОНАРНОГО ЛФ
- ИХ, минимизирующая СКО
- произвольная ИХ ЛС
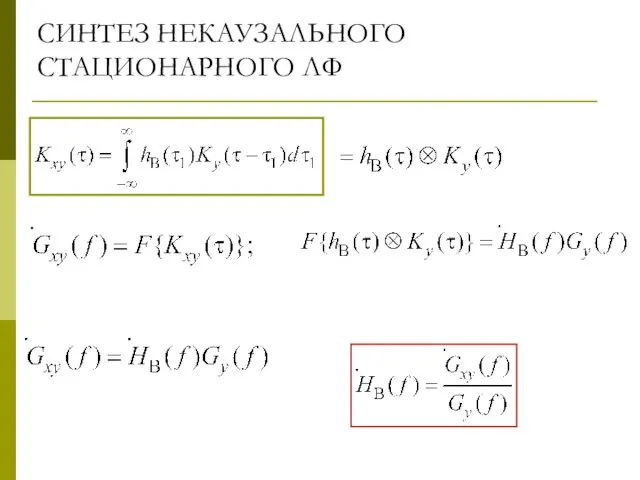
СИНТЕЗ НЕКАУЗАЛЬНОГО СТАЦИОНАРНОГО ЛФ
СИНТЕЗ НЕКАУЗАЛЬНОГО СТАЦИОНАРНОГО ЛФ
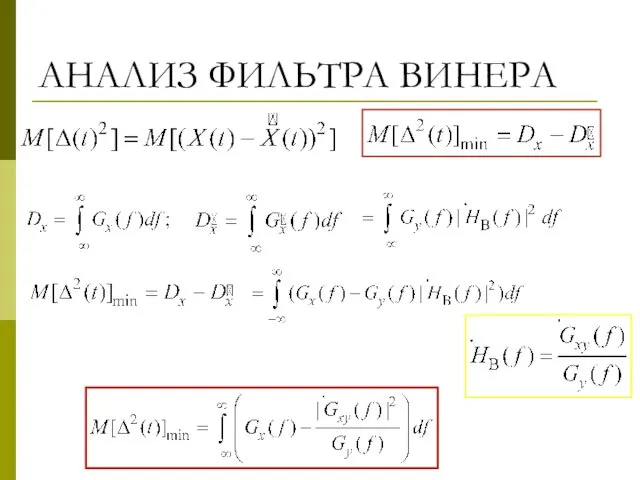
АНАЛИЗ ФИЛЬТРА ВИНЕРА
АНАЛИЗ ФИЛЬТРА ВИНЕРА
Для отыскания оптимальной линейной оценки необходимо знать только Ky(t) и
Для отыскания оптимальной линейной оценки необходимо знать только Ky(t) и
Для всех гауссовских и негауссовских процессов, имеющих одинаковые Ky(t), Kx(t) и
Для всех гауссовских и негауссовских процессов, имеющих одинаковые Ky(t), Kx(t) и
ФИЛЬТР ВИНЕРА ДЛЯ СИГНАЛА,
НЕКОРРЕЛИРОВАННОГО С АДДИТИВНОЙ ПОМЕХОЙ
Оцениваемый процесс X(t)
ФИЛЬТР ВИНЕРА ДЛЯ СИГНАЛА,
НЕКОРРЕЛИРОВАННОГО С АДДИТИВНОЙ ПОМЕХОЙ
Оцениваемый процесс X(t)
ФИЛЬТР ВИНЕРА ДЛЯ СИГНАЛА,
НЕКОРРЕЛИРОВАННОГО С АДДИТИВНОЙ ПОМЕХОЙ
ФИЛЬТР ВИНЕРА ДЛЯ СИГНАЛА,
НЕКОРРЕЛИРОВАННОГО С АДДИТИВНОЙ ПОМЕХОЙ
ВЫВОДЫ
1. Поскольку СПМ являются вещественными и четными функциями, то
- КЧХ фильтра
ВЫВОДЫ
1. Поскольку СПМ являются вещественными и четными функциями, то
- КЧХ фильтра
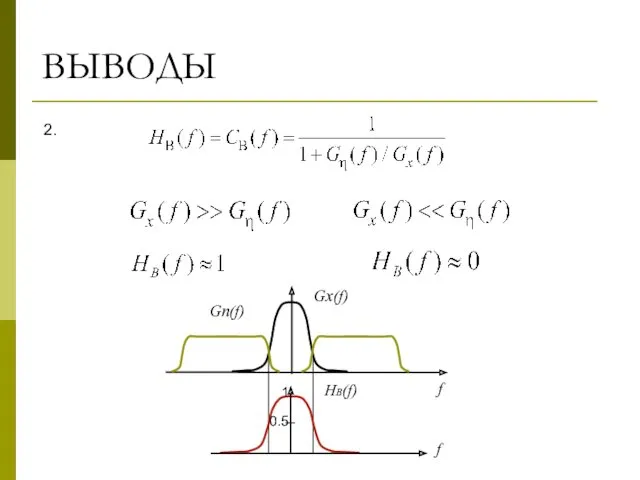
2.
f
Gn(f)
Gx(f)
f
1
0.5
HВ(f)
ВЫВОДЫ
2.
f
Gn(f)
Gx(f)
f
1
0.5
HВ(f)
ВЫВОДЫ
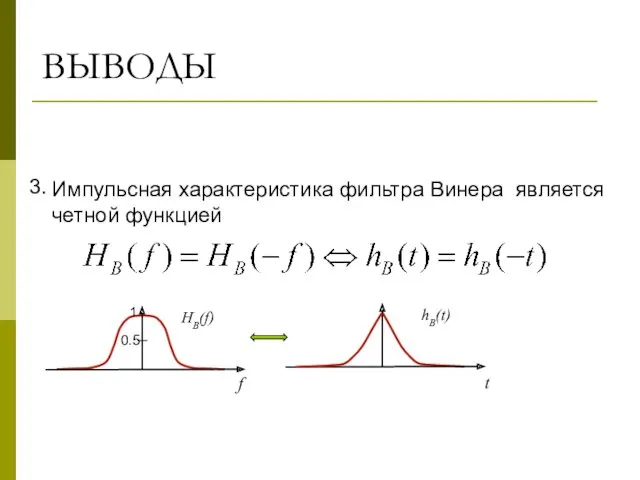
3.
Импульсная характеристика фильтра Винера является четной функцией
ВЫВОДЫ
3.
Импульсная характеристика фильтра Винера является четной функцией
ВЫВОДЫ
ВЫВОДЫ
4. Величина среднеквадратической ошибки не превышает дисперсии шума:
Использование фильтра Винера не
ВЫВОДЫ
4. Величина среднеквадратической ошибки не превышает дисперсии шума:
Использование фильтра Винера не
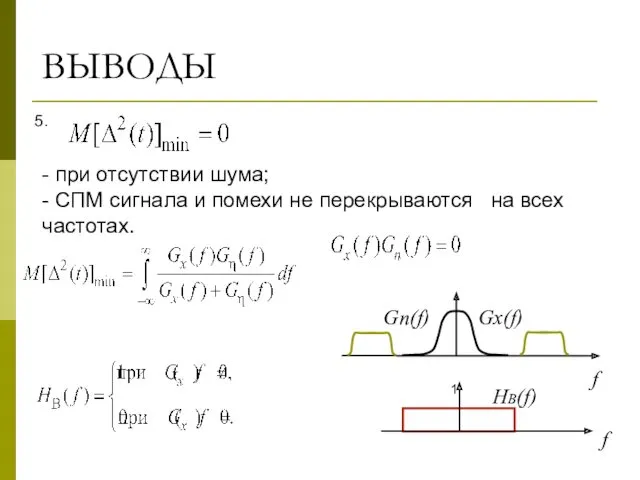
5.
- при отсутствии шума;
- СПМ сигнала и помехи не перекрываются на
5.
- при отсутствии шума;
- СПМ сигнала и помехи не перекрываются на
 Полезные ископаемые
Полезные ископаемые Биологиялық мембрананың өткізгіштік механаимі. Иондық каналдар және тасымалдаушылардың құрылысы мен функциясы
Биологиялық мембрананың өткізгіштік механаимі. Иондық каналдар және тасымалдаушылардың құрылысы мен функциясы Основы православной культуры
Основы православной культуры English-speaking countries. Викторина
English-speaking countries. Викторина Реализация художественноэстетического направления развития детей дошкольного возраста в аспекте ФГОС ДО по программе Радуга
Реализация художественноэстетического направления развития детей дошкольного возраста в аспекте ФГОС ДО по программе Радуга Пилигримы в пути
Пилигримы в пути 7 класс: Рельеф С.Америки
7 класс: Рельеф С.Америки Шумы и помехи
Шумы и помехи Бүйрек, несепағар жарақаттары
Бүйрек, несепағар жарақаттары Монастыри, основанные Сергием Радонежским
Монастыри, основанные Сергием Радонежским Кислородные соединения азота
Кислородные соединения азота Презентация Развитие связной речи посредством театрализованной деятельности
Презентация Развитие связной речи посредством театрализованной деятельности Лучевая диагностика выделительной системы
Лучевая диагностика выделительной системы Духовная зрелость человека
Духовная зрелость человека Презентация Добрые дела на все времена
Презентация Добрые дела на все времена презентация к уроку в 9 классе Тоталитарные режимы 1930-х годов: Италия, Германия, Испания
презентация к уроку в 9 классе Тоталитарные режимы 1930-х годов: Италия, Германия, Испания Проходка разрезной траншеи с погрузкой на железнодорожный транспорт при заданных условиях
Проходка разрезной траншеи с погрузкой на железнодорожный транспорт при заданных условиях Здоровьесберегающие технологии в коррекционной работе с детьми
Здоровьесберегающие технологии в коррекционной работе с детьми Блокада Ленинграда
Блокада Ленинграда Сенсоры. Классификация сенсоров. Миниатюрные электрорадиомеханические и оптоэлектромеханические компоненты
Сенсоры. Классификация сенсоров. Миниатюрные электрорадиомеханические и оптоэлектромеханические компоненты Приобщение детей к национально-культурным традициям с помощью коллажей и мнемотаблиц
Приобщение детей к национально-культурным традициям с помощью коллажей и мнемотаблиц Tiens-life. Ваше здоровье - в ваших руках!
Tiens-life. Ваше здоровье - в ваших руках! Контроль сварных стыков газопровода с методами неразрушающего контроля
Контроль сварных стыков газопровода с методами неразрушающего контроля Объем прямоугольного параллелепипеда и треугольной призмы. Решение задач по готовым чертежам
Объем прямоугольного параллелепипеда и треугольной призмы. Решение задач по готовым чертежам Собственный бизнес
Собственный бизнес Классный час по теме Конституция РФ
Классный час по теме Конституция РФ Презентация Мышление и его роль в профессиональном самоопределении личности
Презентация Мышление и его роль в профессиональном самоопределении личности Письменное деление многозначных чисел на трехзначное число
Письменное деление многозначных чисел на трехзначное число