- Соревнование Следование по инверсной линии

Содержание
- 2. Ранее мы запрограммировали робота, который двигался по линии на основе принципа пропорционально-дифференциального регулирования. Сейчас стоит задача
- 3. Напомню принцип пропорционально-дифференциального регулирования: err =sensor1-sensor2 – это ошибка u=err*2.2 + (err-errold)*15 – это управляющее воздействие
- 4. Параметром, определяющим поведение робота будет являться цвет поля. Потому, как цвет линии – не надёжный параметр.
- 5. Знакомая нам программа для робота с двумя датчиками освещенности, написанная на основе принципа пропорционально-дифференциального регулирования: Та
- 7. Скачать презентацию
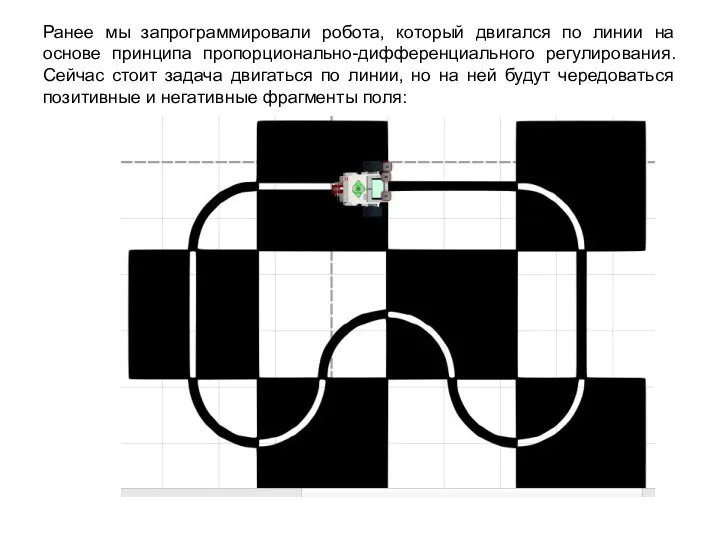
Ранее мы запрограммировали робота, который двигался по линии на основе принципа
Ранее мы запрограммировали робота, который двигался по линии на основе принципа
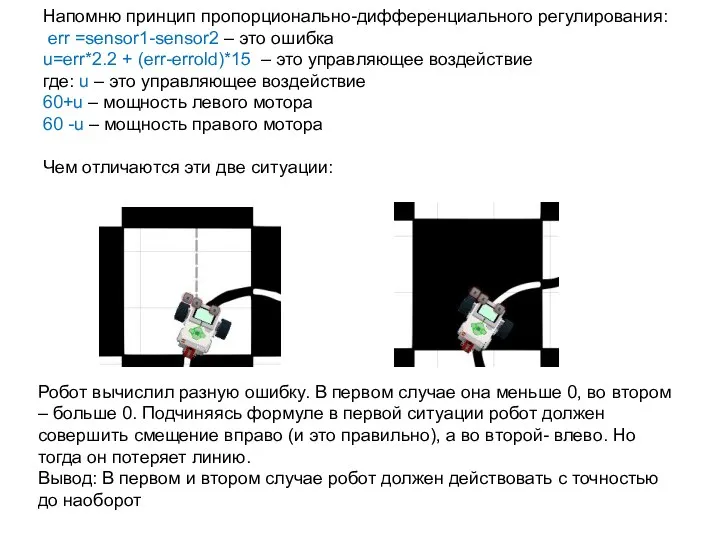
Напомню принцип пропорционально-дифференциального регулирования:
err =sensor1-sensor2 – это ошибка
u=err*2.2 +
Напомню принцип пропорционально-дифференциального регулирования: err =sensor1-sensor2 – это ошибка u=err*2.2 +
Параметром, определяющим поведение робота будет являться цвет поля. Потому, как цвет
Параметром, определяющим поведение робота будет являться цвет поля. Потому, как цвет

Знакомая нам программа для робота с двумя датчиками освещенности, написанная на
Знакомая нам программа для робота с двумя датчиками освещенности, написанная на
 Сотрудничество и взаимодействие как условие развития добровольчества и благотворительности
Сотрудничество и взаимодействие как условие развития добровольчества и благотворительности Кинетика ферментативного катализа. (Лекция 5)
Кинетика ферментативного катализа. (Лекция 5) Регулируемый электропривод подачи токарного станка
Регулируемый электропривод подачи токарного станка Проект на тему: Воскресный обед
Проект на тему: Воскресный обед Альбомы по автоматизации звуков в коротких текстах с иллюстрациями
Альбомы по автоматизации звуков в коротких текстах с иллюстрациями Варгашинский район на карте Курганской области
Варгашинский район на карте Курганской области Body camera GE 911 3. Технические характеристики устройства GE 911
Body camera GE 911 3. Технические характеристики устройства GE 911 Ремонтно - оперативная радиосвязь (РОРС)
Ремонтно - оперативная радиосвязь (РОРС) Расчет индивидуального пожарного риска и разработка мероприятий по обеспечению пожарной безопасности объекта защиты
Расчет индивидуального пожарного риска и разработка мероприятий по обеспечению пожарной безопасности объекта защиты Работа с фетром
Работа с фетром Анализ режимов эксплуатации, порядка проведения технического обслуживания и ремонта питательного насоса ЦНСГ 60-198
Анализ режимов эксплуатации, порядка проведения технического обслуживания и ремонта питательного насоса ЦНСГ 60-198 Аварии на гидротехнических сооружениях и их последствия
Аварии на гидротехнических сооружениях и их последствия Имя прилагательное как часть речи. Происхождение слова
Имя прилагательное как часть речи. Происхождение слова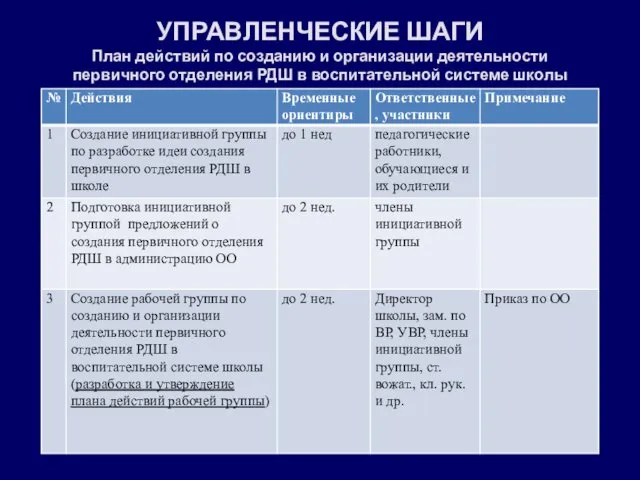 План действий по созданию и организации деятельности первичного отделения РДШ в воспитательной системе школы
План действий по созданию и организации деятельности первичного отделения РДШ в воспитательной системе школы Краеведение, как условие духовно-нравственного воспитания школьников
Краеведение, как условие духовно-нравственного воспитания школьников Лісова та деревообробна промисловість світу
Лісова та деревообробна промисловість світу Великие химики России.
Великие химики России. Газотурбинные установки
Газотурбинные установки Конституция - основной закон страны. Конституция Республики Татарстан
Конституция - основной закон страны. Конституция Республики Татарстан Терминальные состояния
Терминальные состояния презентация к занятию Домашние животные
презентация к занятию Домашние животные Модель ученического самоуправления в начальной школе.
Модель ученического самоуправления в начальной школе. The Different Markets for Fashion
The Different Markets for Fashion презентация к курсу История и культура Санкт- Петербурга
презентация к курсу История и культура Санкт- Петербурга Вешалка
Вешалка презентация к мероприятию День Земли
презентация к мероприятию День Земли Формирование исследовательской компетентности младших школьников
Формирование исследовательской компетентности младших школьников Dictée. Le nouvel édito B1. Leçon 15
Dictée. Le nouvel édito B1. Leçon 15