- Стереофотограмметрические приборы и системы

Содержание
- 2. 1. Назначение и классификация стереофотограмметрических приборов и систем Стереофотограмметрические приборы и системы предназначены для фотограмметрической обработки
- 3. Стереофотограмметрические приборы и системы можно классифицировать на: аналоговые; аналитические; цифровые.
- 4. В аналоговых стереофотограмметрических приборах для построения связки проектирующих лучей и модели местности используются оптические или механические,
- 5. 2. Аналитические стереофотограмметрические системы Любая аналитическая стереофотограмметрическая система состоит из стереокомпаратора, датчиков координат и компьютера. Стереокомпаратор
- 6. Рисунок 1 – Стереокомпаратор Steko 1818 Стереокомпаратор содержит стереоскопическую наблюдательную систему с измерительными марками и каретки
- 7. Датчики координат предназначены для задания пространственных координат точек объекта. Компьютер с помощью специального программного обеспечения регистрирует
- 8. Рисунок 2 – Аналитическая стереофотограмметрическая система
- 9. Аналитическая стереофотограмметрическая система может работать в двух режимах: стереокомпараторный и измерения модели. В стереокомпараторном режиме выполняются:
- 10. В режиме измерения модели прибор работает следующим образом: - вращая штурвалы X, Y, Z оператор вводит
- 11. 3. Цифровые стереофотограмметрические системы На рис.3 представлена обобщенная принципиальная схема цифровой фотограмметрической системы. Любая цифровая стереофотограмметрическая
- 12. Рисунок 3 – Принципиальная схема ЦФС
- 13. Устройства ввода предназначены для получения и ввода цифровых изображений в фотограмметрическую рабочую станцию. В качестве таких
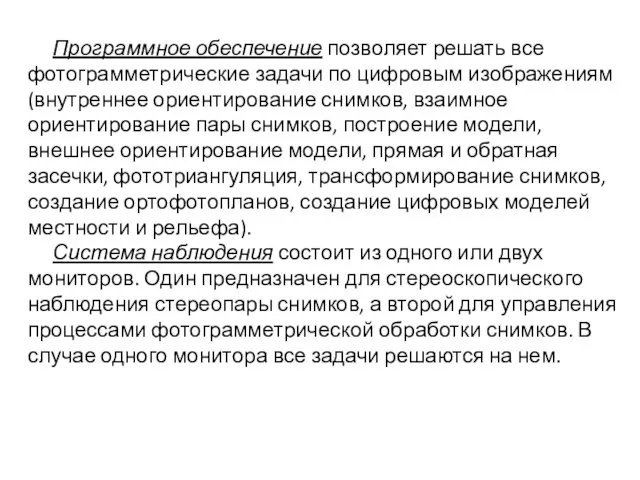
- 14. Программное обеспечение позволяет решать все фотограмметрические задачи по цифровым изображениям (внутреннее ориентирование снимков, взаимное ориентирование пары
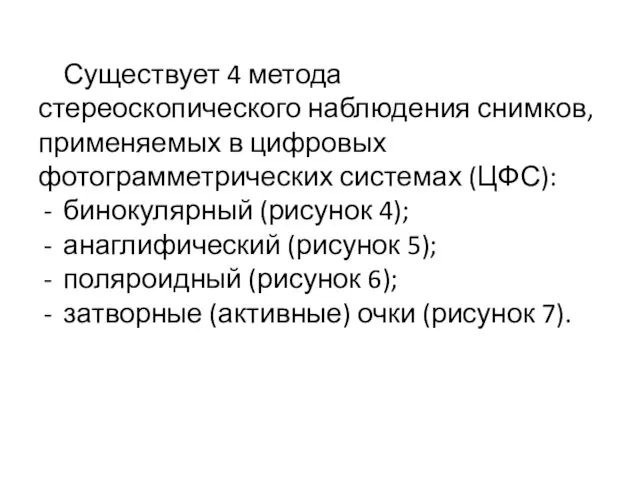
- 15. Существует 4 метода стереоскопического наблюдения снимков, применяемых в цифровых фотограмметрических системах (ЦФС): бинокулярный (рисунок 4); анаглифический
- 16. Рисунок 4 – Бинокулярный Рисунок 5 - Анаглифический Рисунок 6 - Поляроидный Рисунок 7 – Затворные
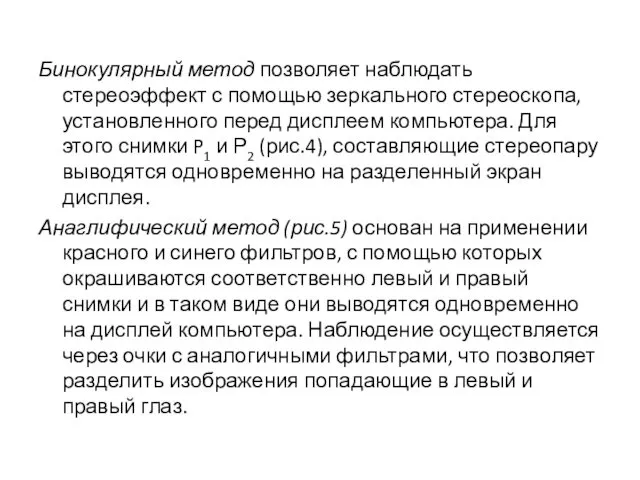
- 17. Бинокулярный метод позволяет наблюдать стереоэффект с помощью зеркального стереоскопа, установленного перед дисплеем компьютера. Для этого снимки
- 18. Поляроидный метод. Этот метод имеет две реализации. В первом случае используется специальный дисплей, имеющий две электронные
- 19. Затворные (активные) очки. Суть данного метода стереоскопического наблюдения заключается в том, что снимки, составляющие стереопару высвечиваются
- 20. Датчики координат предназначены для задания координат точек местности X,Y,Z (как и в аналитической системе). В качестве
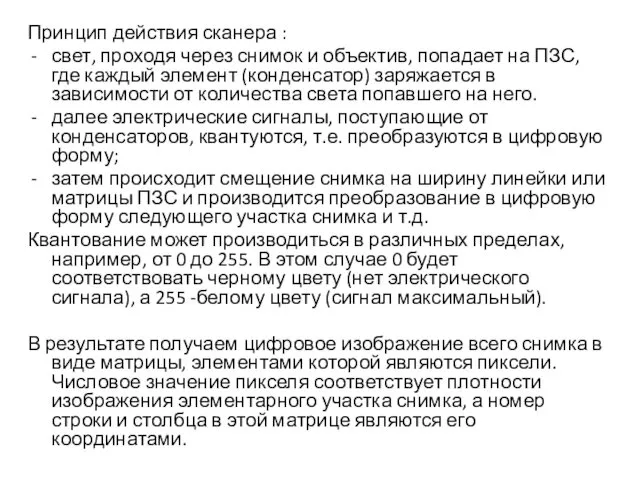
- 21. 4. Устройства ввода (сканеры) Сканеры предназначены для преобразования аналоговых фотоизображений в цифровую форму. Сканер состоит из:
- 22. Рисунок 8 Рисунок 9
- 23. Принцип действия сканера : свет, проходя через снимок и объектив, попадает на ПЗС, где каждый элемент
- 24. Величина элементарного участка снимка (пикселя), который преобразуется в цифровую форму, может быть различной для конкретного сканера
- 25. Все искажения вносимые сканером можно разделить на две составляющее: постоянные для данного сканера и переменные искажения.
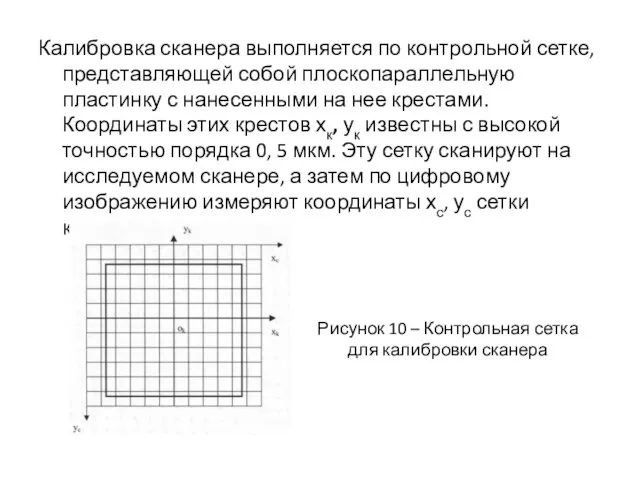
- 26. Калибровка сканера выполняется по контрольной сетке, представляющей собой плоскопараллельную пластинку с нанесенными на нее крестами. Координаты
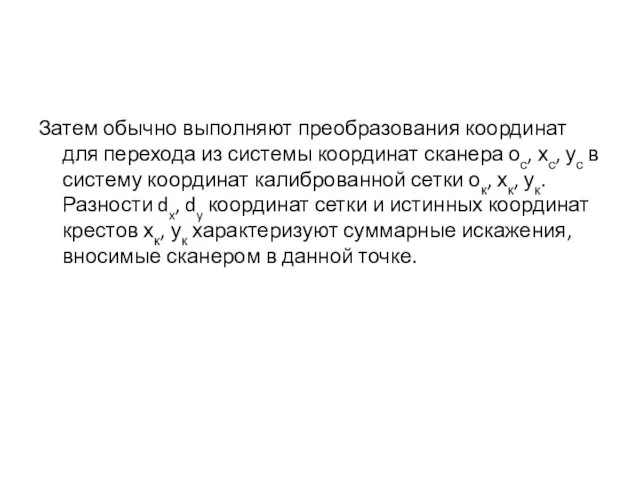
- 27. Затем обычно выполняют преобразования координат для перехода из системы координат сканера ос, хс, ус в систему
- 29. Скачать презентацию
1. Назначение и классификация стереофотограмметрических приборов и систем
Стереофотограмметрические приборы и системы
1. Назначение и классификация стереофотограмметрических приборов и систем
Стереофотограмметрические приборы и системы
Стереофотограмметрические приборы и системы можно классифицировать на:
аналоговые;
аналитические;
цифровые.
Стереофотограмметрические приборы и системы можно классифицировать на:
аналоговые;
аналитические;
цифровые.
В аналоговых стереофотограмметрических приборах для построения связки проектирующих лучей и модели
В аналоговых стереофотограмметрических приборах для построения связки проектирующих лучей и модели
2. Аналитические стереофотограмметрические системы
Любая аналитическая стереофотограмметрическая система состоит из стереокомпаратора, датчиков
2. Аналитические стереофотограмметрические системы
Любая аналитическая стереофотограмметрическая система состоит из стереокомпаратора, датчиков
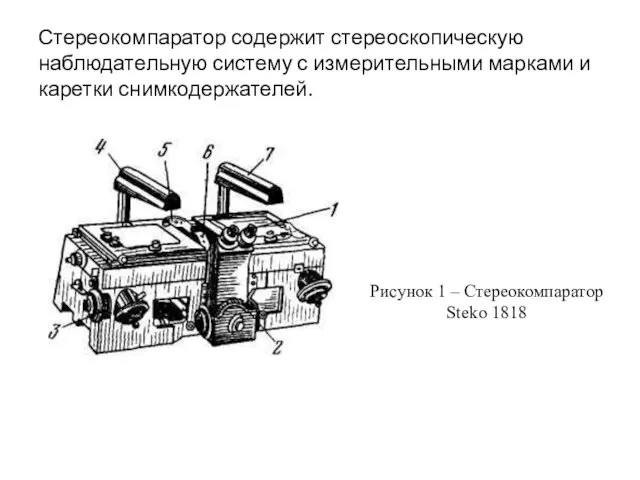
Рисунок 1 – Стереокомпаратор Steko 1818
Стереокомпаратор содержит стереоскопическую наблюдательную систему с
Рисунок 1 – Стереокомпаратор Steko 1818
Стереокомпаратор содержит стереоскопическую наблюдательную систему с
Датчики координат предназначены для задания пространственных координат точек объекта.
Компьютер с помощью
Датчики координат предназначены для задания пространственных координат точек объекта.
Компьютер с помощью
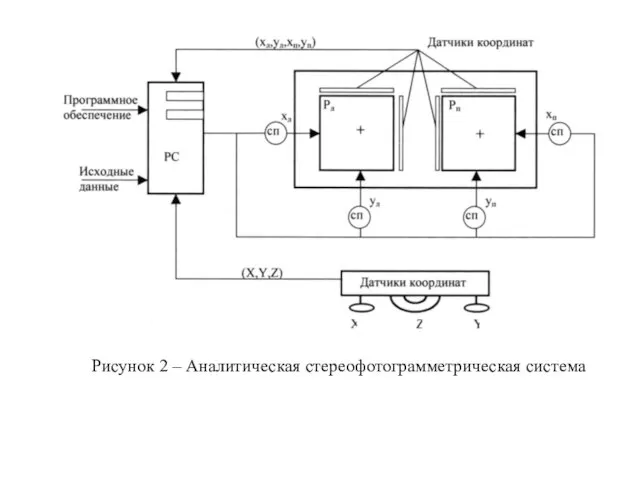
Рисунок 2 – Аналитическая стереофотограмметрическая система
Рисунок 2 – Аналитическая стереофотограмметрическая система
Аналитическая стереофотограмметрическая система может работать в двух режимах: стереокомпараторный и измерения
Аналитическая стереофотограмметрическая система может работать в двух режимах: стереокомпараторный и измерения
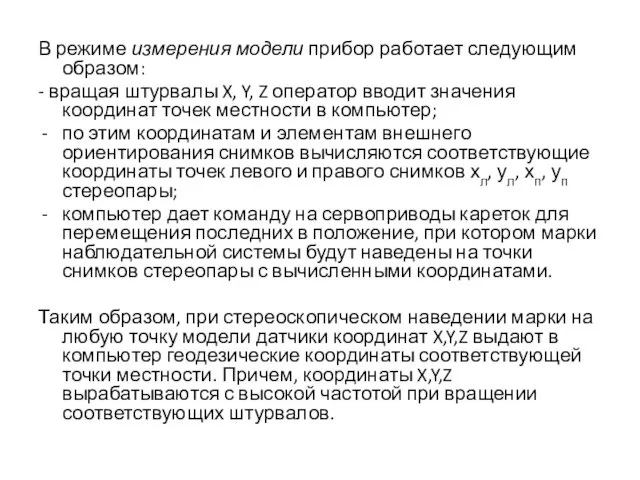
В режиме измерения модели прибор работает следующим образом:
- вращая штурвалы X,
В режиме измерения модели прибор работает следующим образом:
- вращая штурвалы X,
3. Цифровые стереофотограмметрические системы
На рис.3 представлена обобщенная принципиальная схема цифровой фотограмметрической
3. Цифровые стереофотограмметрические системы
На рис.3 представлена обобщенная принципиальная схема цифровой фотограмметрической
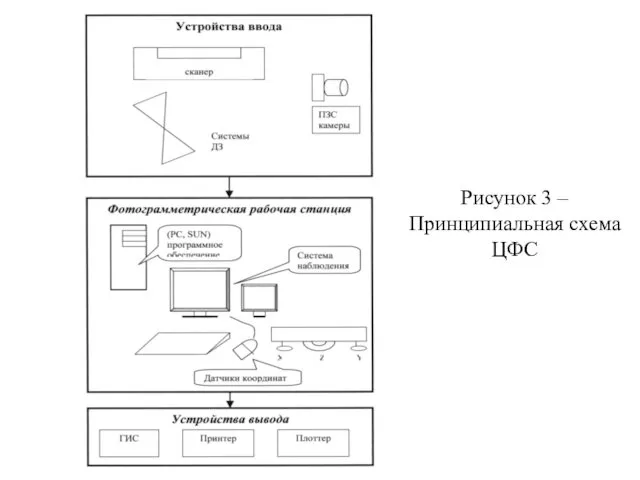
Рисунок 3 – Принципиальная схема ЦФС
Рисунок 3 – Принципиальная схема ЦФС
Устройства ввода предназначены для получения и ввода цифровых изображений в фотограмметрическую
Устройства ввода предназначены для получения и ввода цифровых изображений в фотограмметрическую
Программное обеспечение позволяет решать все фотограмметрические задачи по цифровым изображениям (внутреннее
Программное обеспечение позволяет решать все фотограмметрические задачи по цифровым изображениям (внутреннее
Существует 4 метода стереоскопического наблюдения снимков, применяемых в цифровых фотограмметрических системах
Существует 4 метода стереоскопического наблюдения снимков, применяемых в цифровых фотограмметрических системах
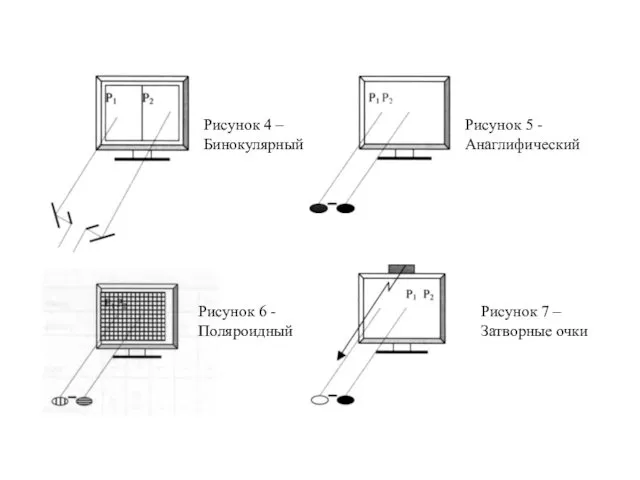
Рисунок 4 – Бинокулярный
Рисунок 5 - Анаглифический
Рисунок 6 - Поляроидный
Рисунок 7
Рисунок 4 – Бинокулярный
Рисунок 5 - Анаглифический
Рисунок 6 - Поляроидный
Рисунок 7
Бинокулярный метод позволяет наблюдать стереоэффект с помощью зеркального стереоскопа, установленного перед
Бинокулярный метод позволяет наблюдать стереоэффект с помощью зеркального стереоскопа, установленного перед
Поляроидный метод. Этот метод имеет две реализации.
В первом случае используется
В первом случае используется
Затворные (активные) очки. Суть данного метода стереоскопического наблюдения заключается в том,
Затворные (активные) очки. Суть данного метода стереоскопического наблюдения заключается в том,
Датчики координат предназначены для задания координат точек местности X,Y,Z (как и
Датчики координат предназначены для задания координат точек местности X,Y,Z (как и
4. Устройства ввода (сканеры)
Сканеры предназначены для преобразования аналоговых фотоизображений в цифровую
4. Устройства ввода (сканеры)
Сканеры предназначены для преобразования аналоговых фотоизображений в цифровую
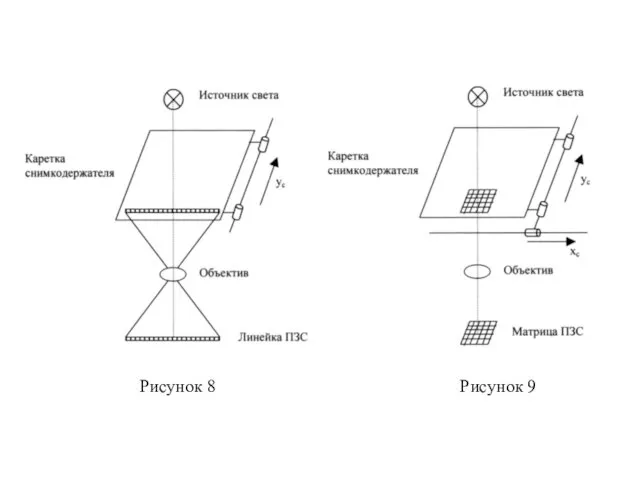
Рисунок 8
Рисунок 9
Рисунок 8
Рисунок 9
Принцип действия сканера :
свет, проходя через снимок и объектив, попадает
Принцип действия сканера :
свет, проходя через снимок и объектив, попадает
Величина элементарного участка снимка (пикселя), который преобразуется в цифровую форму, может
Величина элементарного участка снимка (пикселя), который преобразуется в цифровую форму, может
Все искажения вносимые сканером можно разделить на две составляющее: постоянные для
Все искажения вносимые сканером можно разделить на две составляющее: постоянные для
Калибровка сканера выполняется по контрольной сетке, представляющей собой плоскопараллельную пластинку с
Калибровка сканера выполняется по контрольной сетке, представляющей собой плоскопараллельную пластинку с
Затем обычно выполняют преобразования координат для перехода из системы координат сканера
Затем обычно выполняют преобразования координат для перехода из системы координат сканера
 Тренинг на сплочение коллектива
Тренинг на сплочение коллектива Игра - презентация Бабушка - Загадушка
Игра - презентация Бабушка - Загадушка Шаблон Фракталы-22
Шаблон Фракталы-22 Интеграция ФЭМП в разных образовательных областях
Интеграция ФЭМП в разных образовательных областях Презентация к открытому уроку по теме Фриволите
Презентация к открытому уроку по теме Фриволите Витамин С в сокосодержащих продуктах
Витамин С в сокосодержащих продуктах разноцветный детский сад
разноцветный детский сад Классный час Конституция РФ
Классный час Конституция РФ История моей библиотеки
История моей библиотеки Компетентностный подход в дополнительном образовании детей
Компетентностный подход в дополнительном образовании детей Правописание мягкого знака в числительных
Правописание мягкого знака в числительных Урок по географии в 6 классе Озёра. Происхождение озёр. Значение озёр
Урок по географии в 6 классе Озёра. Происхождение озёр. Значение озёр Изготовление двусторонних гибких печатных плат с металлизацией отверстий
Изготовление двусторонних гибких печатных плат с металлизацией отверстий Движение воздушных масс. Атмосферный фронт. Циклоны и антициклоны
Движение воздушных масс. Атмосферный фронт. Циклоны и антициклоны Метод проектов
Метод проектов Створення датчику руху та дослідження його характеристик
Створення датчику руху та дослідження його характеристик Задачи на изменение массы пластинки
Задачи на изменение массы пластинки Байкал
Байкал Arduino. Язык программирования Arduino
Arduino. Язык программирования Arduino Машины для свайных работ
Машины для свайных работ Святыни земли Ровеньской
Святыни земли Ровеньской Управление пользователями. Процессы. Права доступа. Репозитории. Урок 2
Управление пользователями. Процессы. Права доступа. Репозитории. Урок 2 Поражение сердечно-сосудистой системы при антифосфолипидном синдроме
Поражение сердечно-сосудистой системы при антифосфолипидном синдроме Релейная защита и автоматизация ЭЭС
Релейная защита и автоматизация ЭЭС Античная цивилизация, или античный мир
Античная цивилизация, или античный мир Игорь Иванович Сикорский
Игорь Иванович Сикорский Налаштовування параметрів безпеки в середовищі браузера
Налаштовування параметрів безпеки в середовищі браузера Fish Phonics Game
Fish Phonics Game