- Технические средства автоматики (ТСА). Часть 2

Содержание
- 2. Функции ТСА Технические средства автоматизации выполняют следующие функции: сбор и преобразование информации о состоянии процесса; передачу
- 3. Классификация ТСА По выполняемой функции ТСА делятся на: Первичные преобразователи – датчики. Усилители. Управляющие устройства. Исполнительные
- 4. датчики Первичный преобразователь – чувствительный элемент, преобразующий измеряемые параметры среды в электрический сигнал. Датчик – законченное
- 5. Классификация датчиков По виду выходных величин: активные (генераторные); пассивные (параметрические). Пример активного датчика – активный датчик
- 6. Классификация датчиков По измеряемому параметру: датчики давления; расхода; уровня; температуры; концентрации ; перемещения; угла поворота; фотодатчики
- 7. Классификация датчиков По принципу действия: оптические (фотодатчики); магнитоэлектрические (на основе эффекта Холла); пьезоэлектрические; тензопреобразователи; емкостные; потенциометрические;
- 8. Классификация датчиков По характеру выходного сигнала: дискретные; аналоговые; цифровые; импульсные. По среде передачи сигналов: проводные; беспроводные.
- 9. Основные характеристики датчиков Выбирая датчики, надо учитывать следующие их характеристики: функциональную зависимость между входным и выходным
- 10. Статическая характеристика датчика Пример – термосопротивление: сопротивление металла линейно зависит от температуры: где (для Pt100).
- 11. Чувствительность датчика Чувствительность датчика – это отношение изменения выходного сигнала y к изменению входного сигнала x:
- 12. Динамическая характеристика датчика Динамическая характеристика (инерционность) – определяет, как быстро датчик реагирует на изменения входного сигнала.
- 13. Омические датчики Омические (резистивные) датчики – принцип действия основан на изменении их активного сопротивления при изменении
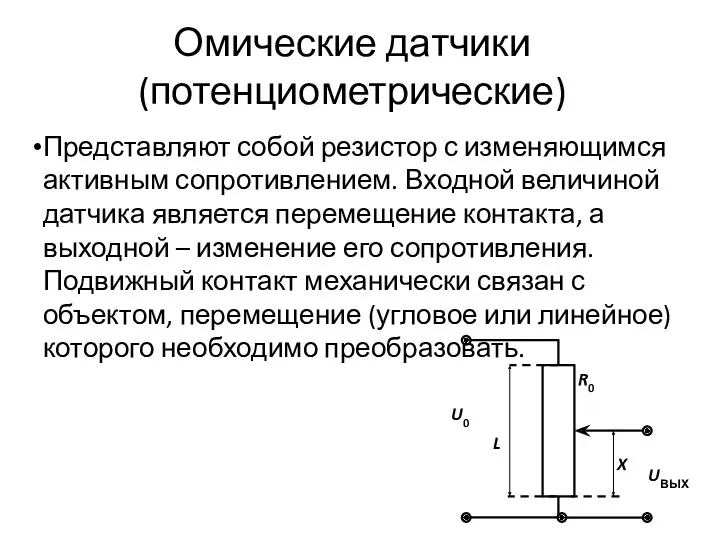
- 14. Омические датчики (потенциометрические) Представляют собой резистор с изменяющимся активным сопротивлением. Входной величиной датчика является перемещение контакта,
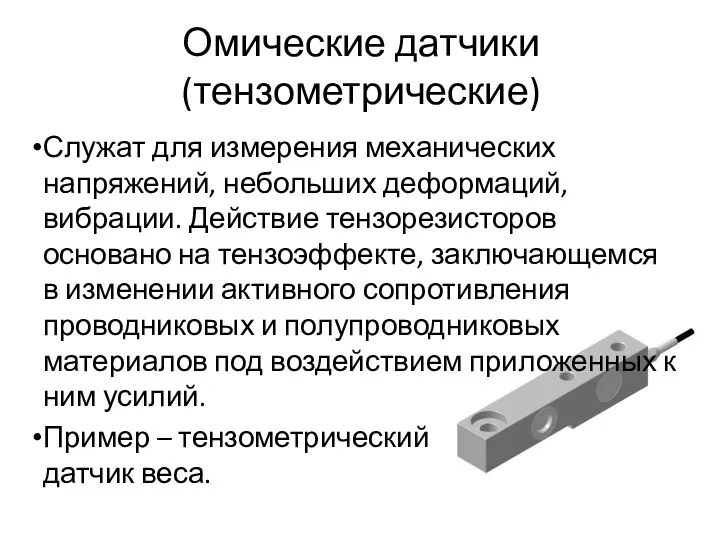
- 15. Омические датчики (тензометрические) Служат для измерения механических напряжений, небольших деформаций, вибрации. Действие тензорезисторов основано на тензоэффекте,
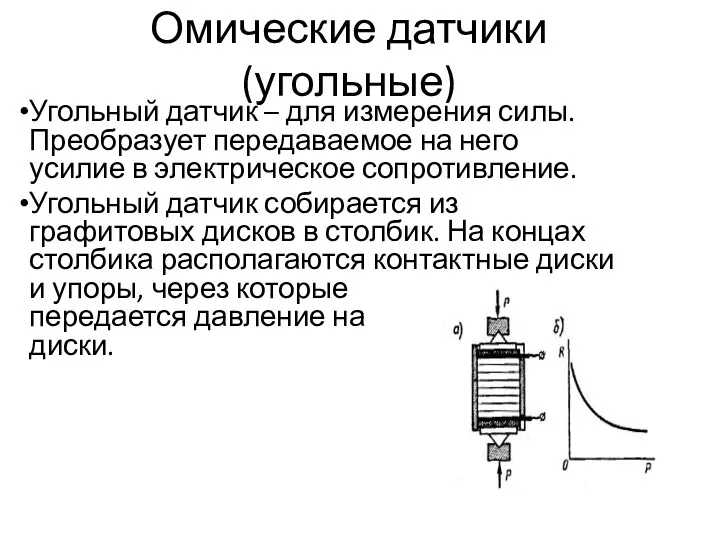
- 16. Омические датчики (угольные) Угольный датчик – для измерения силы. Преобразует передаваемое на него усилие в электрическое
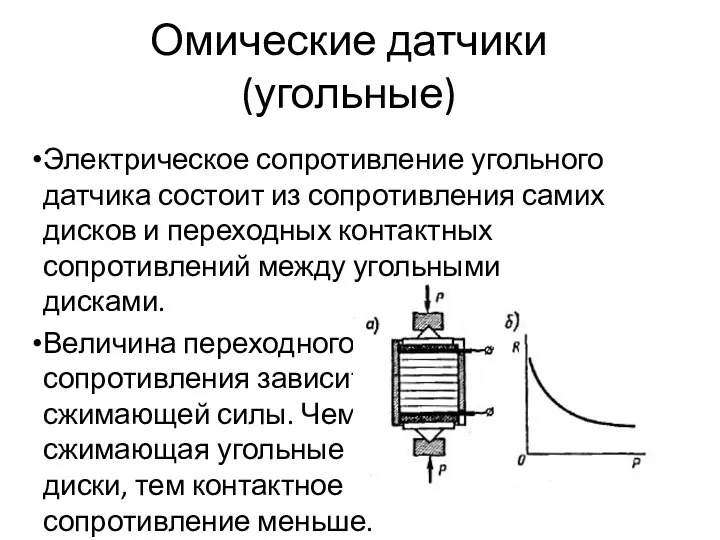
- 17. Омические датчики (угольные) Электрическое сопротивление угольного датчика состоит из сопротивления самих дисков и переходных контактных сопротивлений
- 18. Электромагнитные датчики Электромагнитные датчики основаны на использовании зависимости характеристик магнитной цепи (магнитного сопротивления, магнитной проницаемости, магнитного
- 19. Электромагнитные датчики (индуктивные) Принцип действия основан на изменении амплитуды колебаний генератора при изменении ширины воздушного зазора
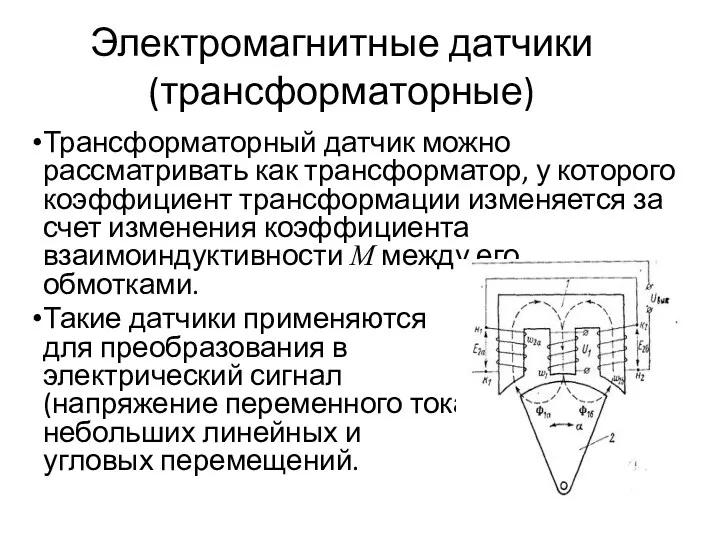
- 20. Электромагнитные датчики (трансформаторные) Трансформаторный датчик можно рассматривать как трансформатор, у которого коэффициент трансформации изменяется за счет
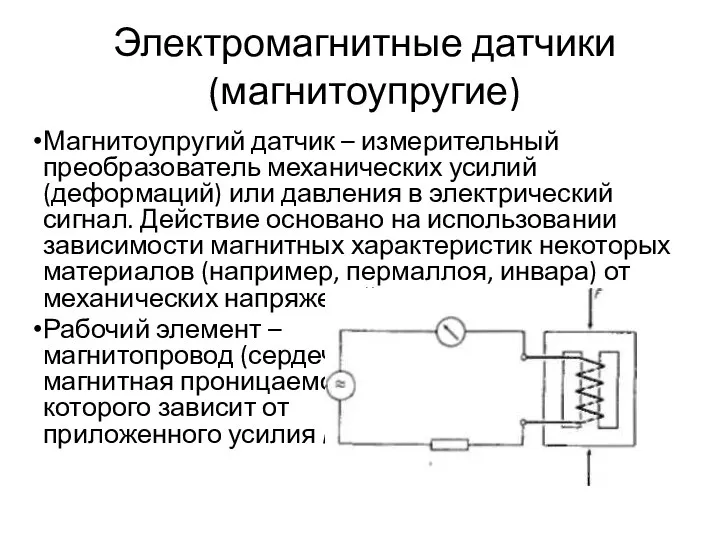
- 21. Электромагнитные датчики (магнитоупругие) Магнитоупругий датчик – измерительный преобразователь механических усилий (деформаций) или давления в электрический сигнал.
- 22. Емкостные датчики В емкостном датчике изменение измеряемой величины преобразуется в изменение ёмкости конденсатора. Ёмкостные датчики получили
- 23. Датчики уровня Датчики уровня – это устройства, позволяющие отслеживать количество жидкого или сыпучего вещества по уровню
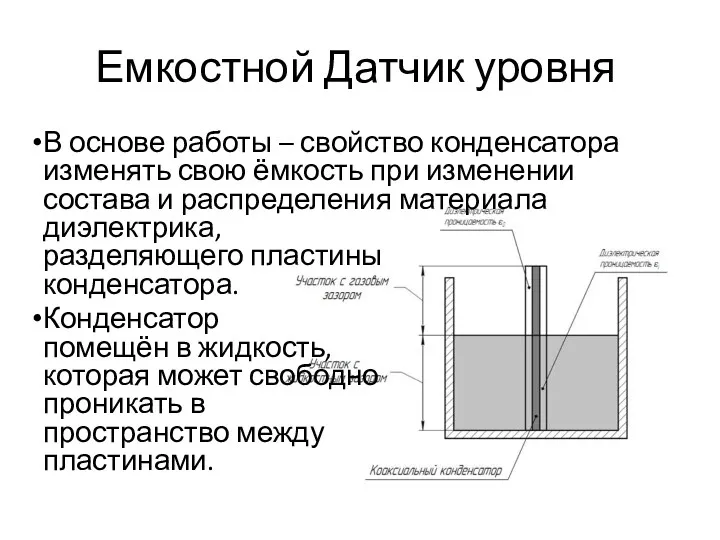
- 24. Емкостной Датчик уровня В основе работы – свойство конденсатора изменять свою ёмкость при изменении состава и
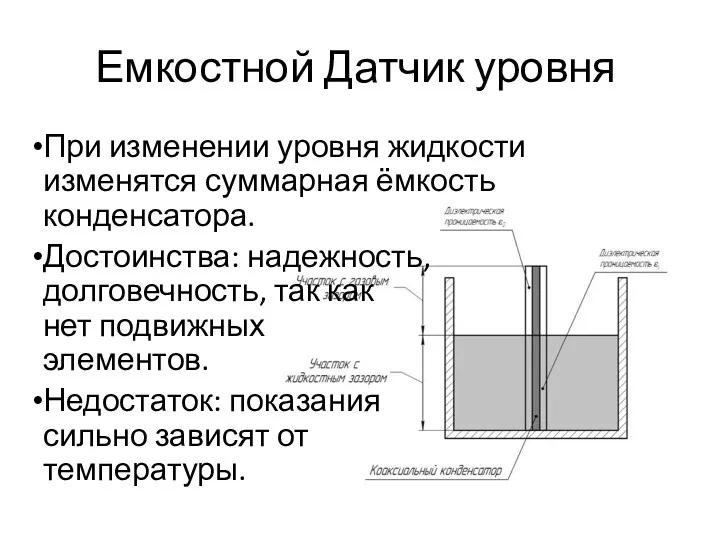
- 25. Емкостной Датчик уровня При изменении уровня жидкости изменятся суммарная ёмкость конденсатора. Достоинства: надежность, долговечность, так как
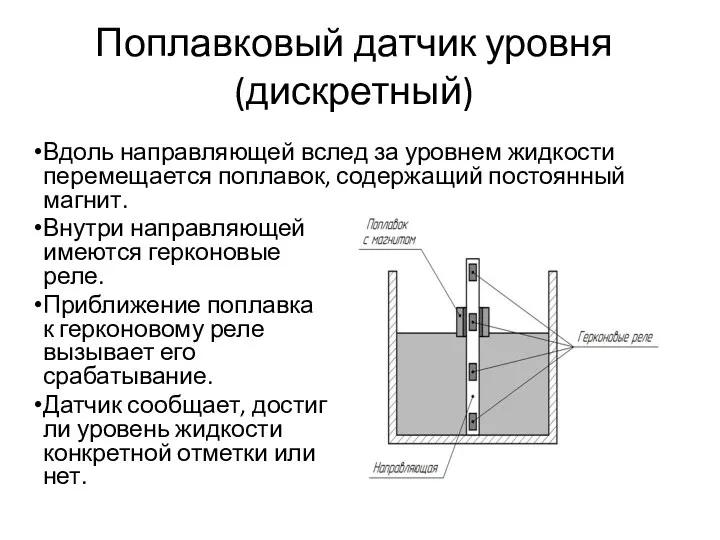
- 26. Поплавковый датчик уровня (дискретный) Вдоль направляющей вслед за уровнем жидкости перемещается поплавок, содержащий постоянный магнит. Внутри
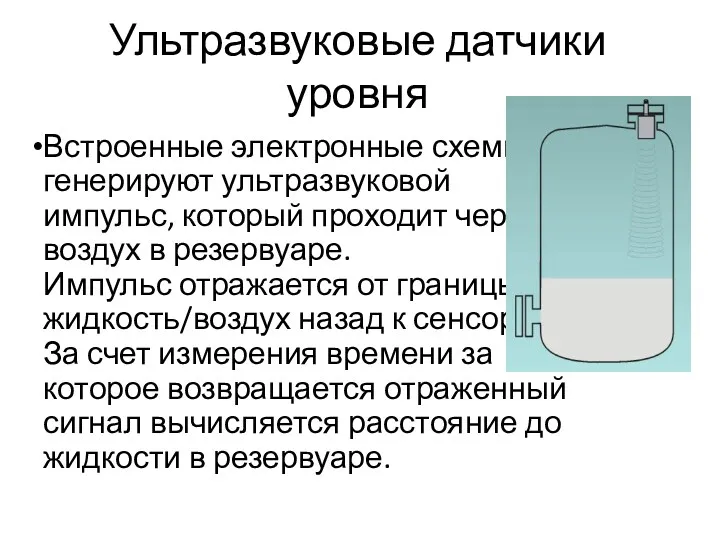
- 27. Ультразвуковые датчики уровня Встроенные электронные схемы генерируют ультразвуковой импульс, который проходит через воздух в резервуаре. Импульс
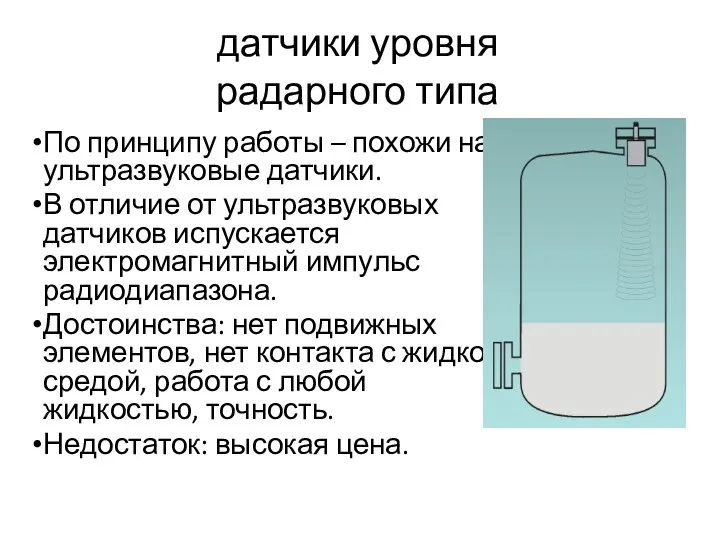
- 28. датчики уровня радарного типа По принципу работы – похожи на ультразвуковые датчики. В отличие от ультразвуковых
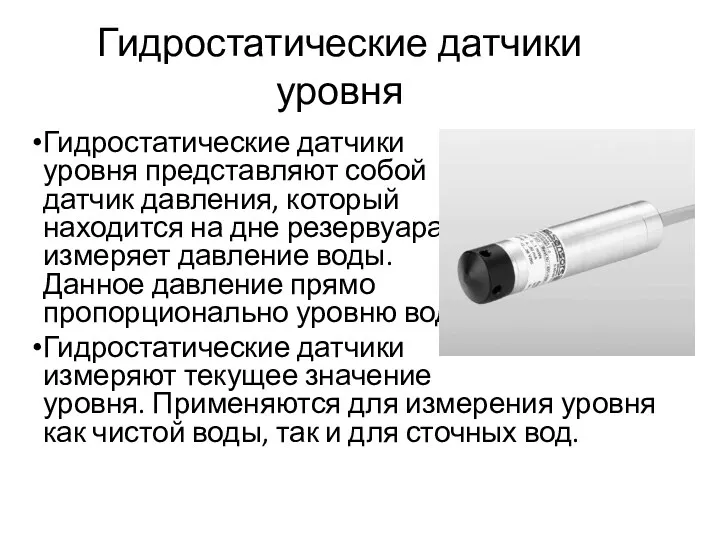
- 29. Гидростатические датчики уровня Гидростатические датчики уровня представляют собой датчик давления, который находится на дне резервуара и
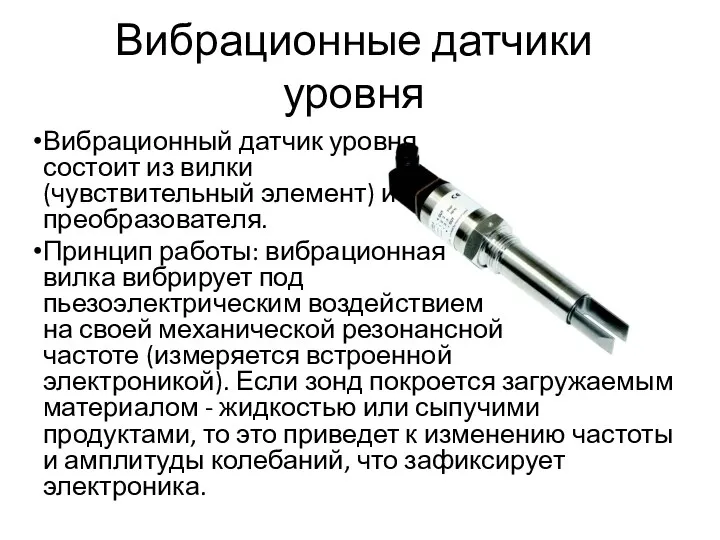
- 30. Вибрационные датчики уровня Вибрационный датчик уровня состоит из вилки (чувствительный элемент) и преобразователя. Принцип работы: вибрационная
- 31. Датчики давления По принципу работы датчики давления бывают: тензометрические; пьезорезистивные; емкостные; индуктивные, резонансные и др.
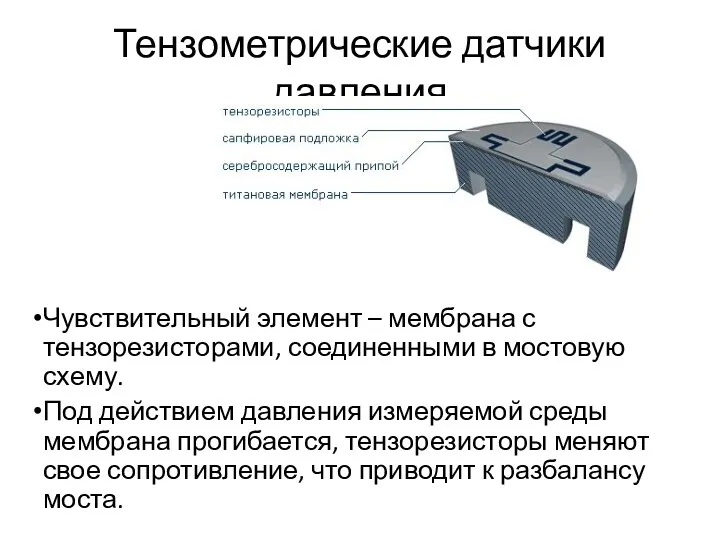
- 32. Тензометрические датчики давления Чувствительный элемент – мембрана с тензорезисторами, соединенными в мостовую схему. Под действием давления
- 33. Пьезорезистивные датчики давления Чувствительный элемент – включенный в мостовую схему пленочный пьезорезистор. Пьезорезистор – изменяет свое
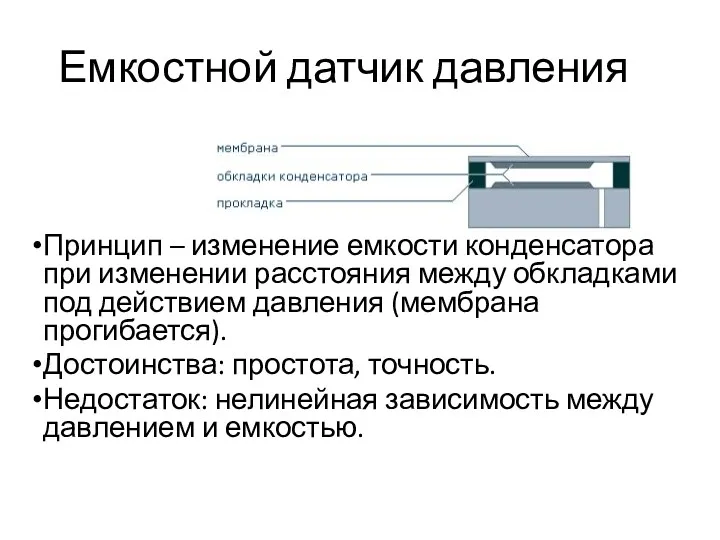
- 34. Емкостной датчик давления Принцип – изменение емкости конденсатора при изменении расстояния между обкладками под действием давления
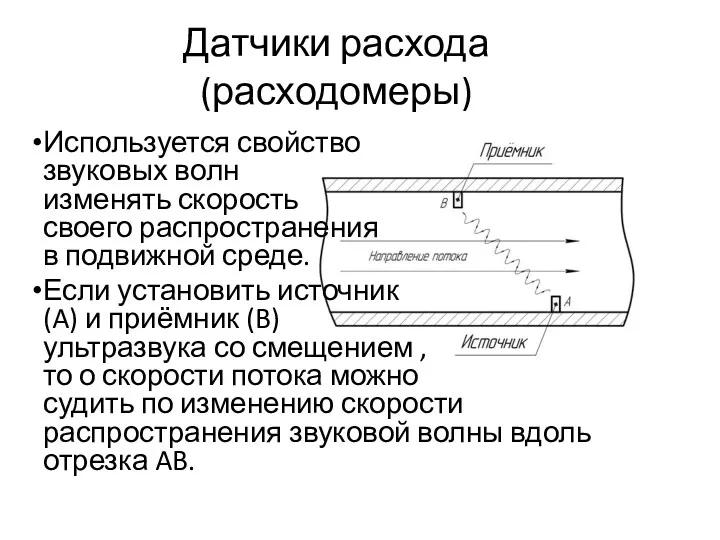
- 35. Датчики расхода (расходомеры) Используется свойство звуковых волн изменять скорость своего распространения в подвижной среде. Если установить
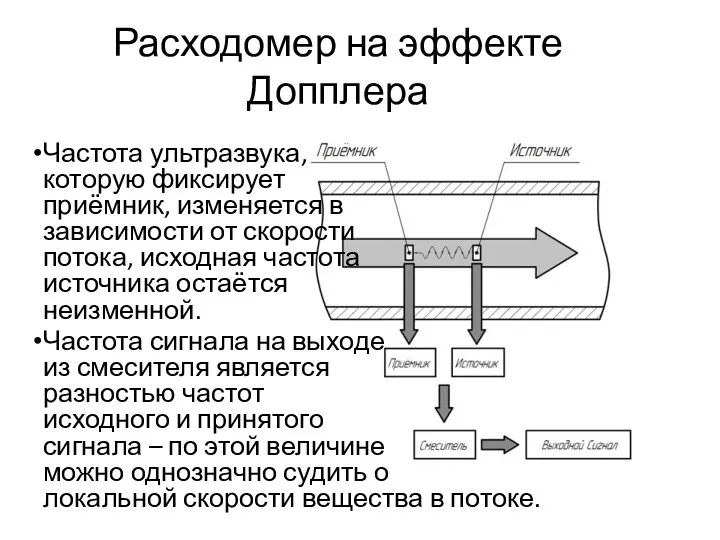
- 36. Расходомер на эффекте Допплера Частота ультразвука, которую фиксирует приёмник, изменяется в зависимости от скорости потока, исходная
- 37. Электромагнитный расходомер Если жидкость проводит ток, её перемещение поперёк линий магнитного поля приведёт к возникновению ЭДС,
- 38. Фотоэлектрические датчики Фотоэлектрические датчики (фотодатчики) используются в автоматике для преобразования в электрический сигнал различных неэлектрических величин:
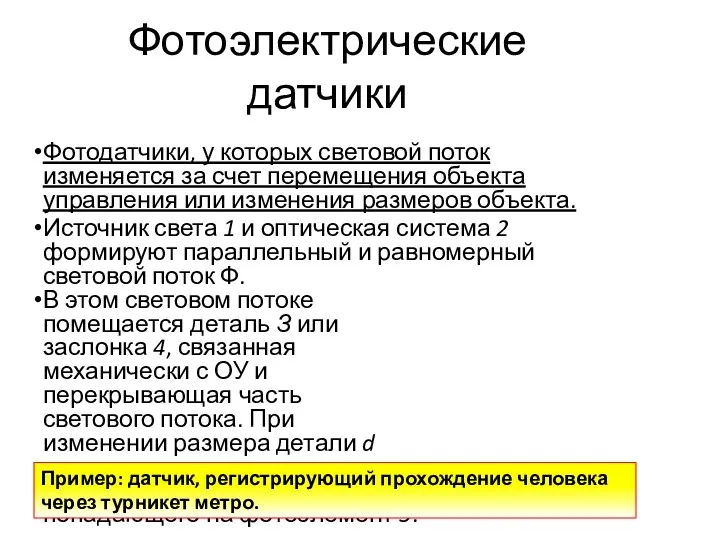
- 39. Фотоэлектрические датчики Фотодатчики, у которых световой поток изменяется за счет перемещения объекта управления или изменения размеров
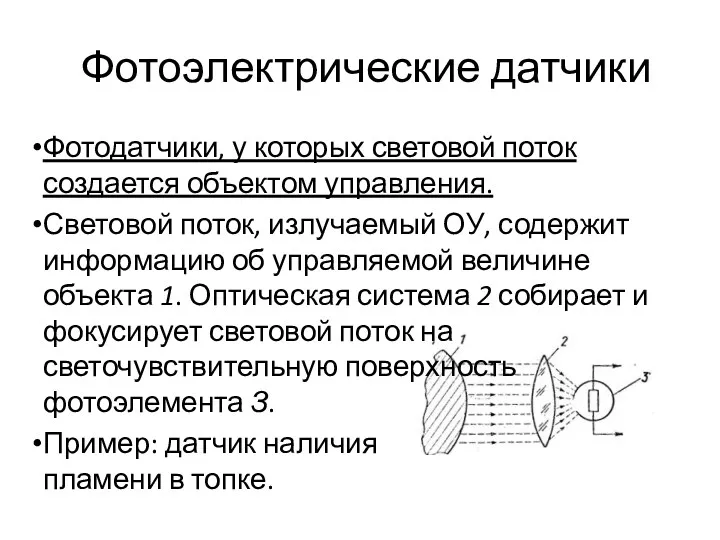
- 40. Фотоэлектрические датчики Фотодатчики, у которых световой поток создается объектом управления. Световой поток, излучаемый ОУ, содержит информацию
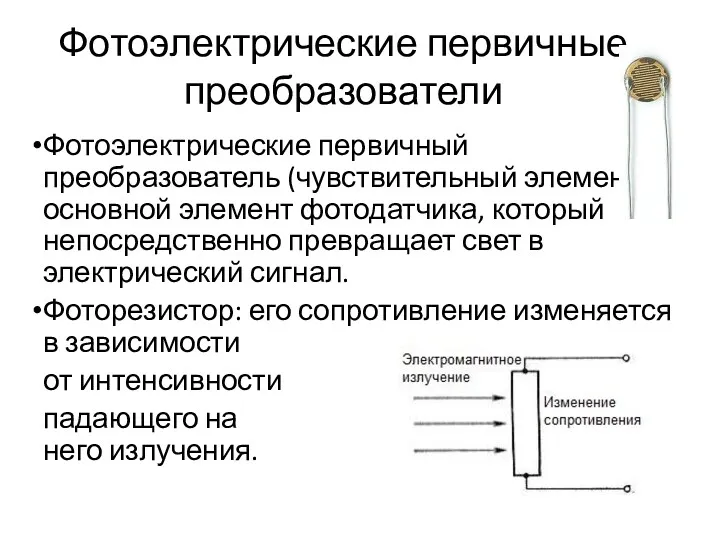
- 41. Фотоэлектрические первичные преобразователи Фотоэлектрические первичный преобразователь (чувствительный элемент) – основной элемент фотодатчика, который непосредственно превращает свет
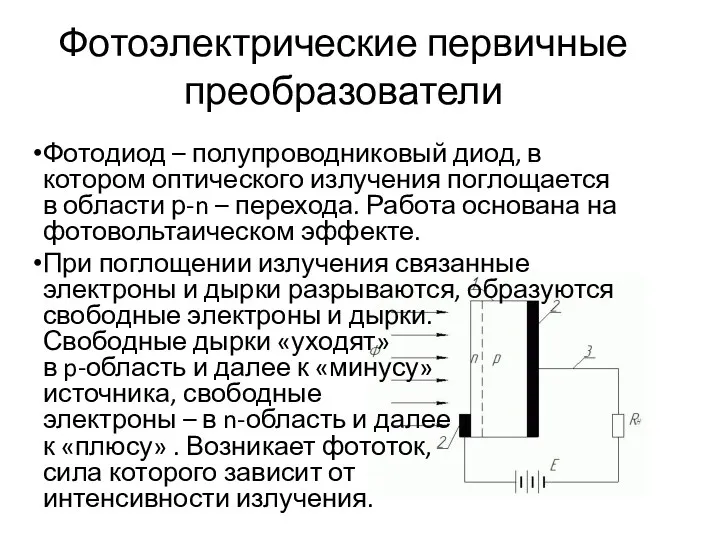
- 42. Фотоэлектрические первичные преобразователи Фотодиод – полупроводниковый диод, в котором оптического излучения поглощается в области р-n –
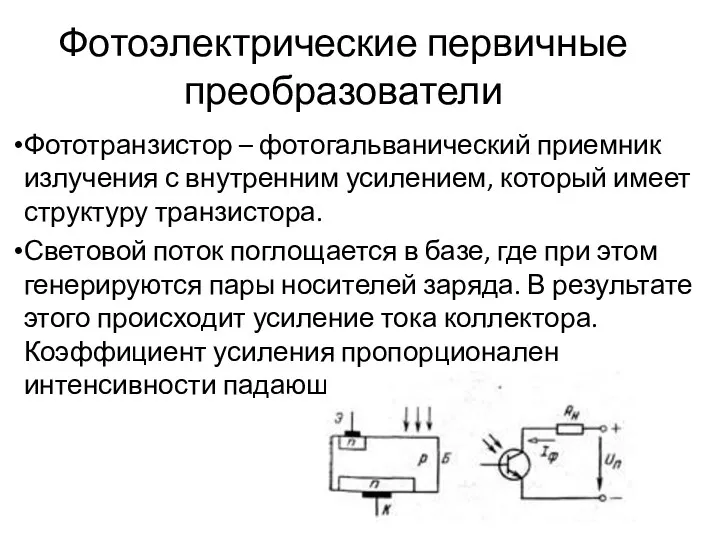
- 43. Фотоэлектрические первичные преобразователи Фототранзистор – фотогальванический приемник излучения с внутренним усилением, который имеет структуру транзистора. Световой
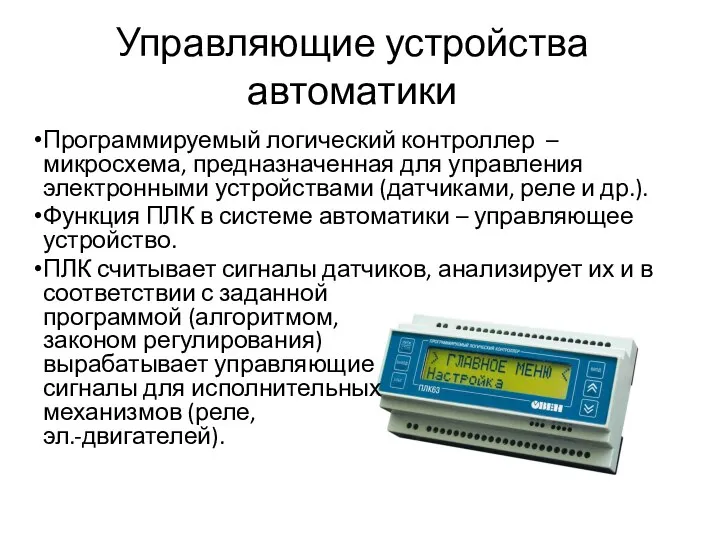
- 44. Управляющие устройства автоматики Программируемый логический контроллер – микросхема, предназначенная для управления электронными устройствами (датчиками, реле и
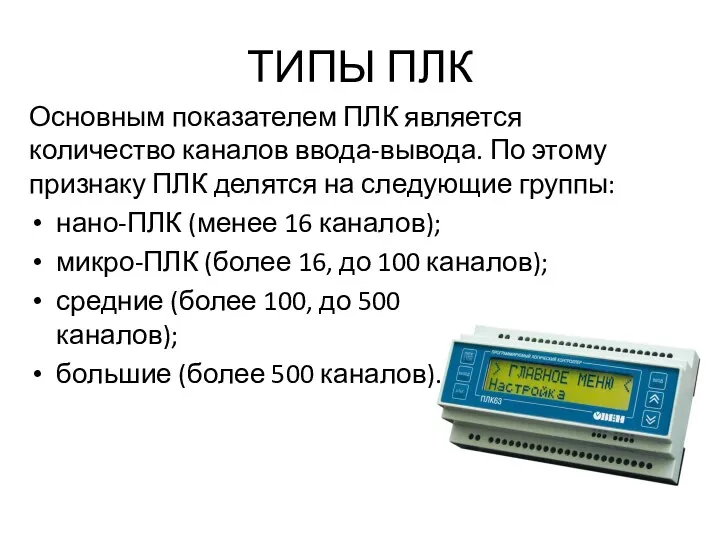
- 45. ТИПЫ ПЛК Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие
- 46. ТИПЫ ПЛК По расположению модулей ввода-вывода ПЛК бывают: 1. Моноблочные: модули ввода-вывода соединены в единое целое
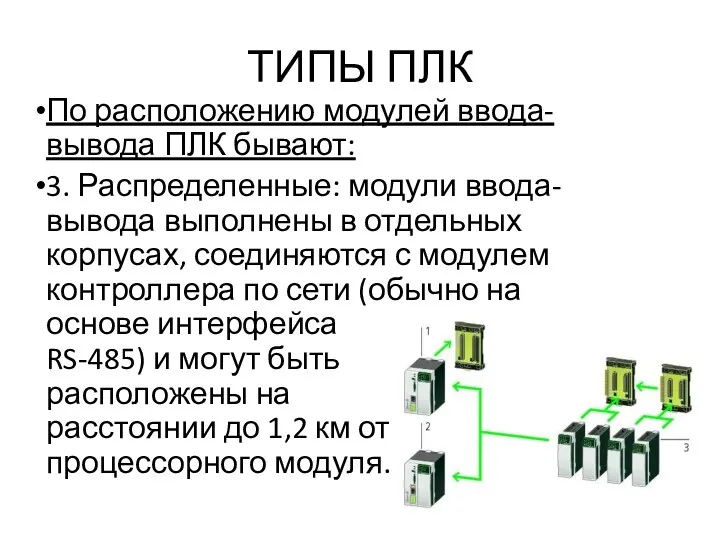
- 47. ТИПЫ ПЛК По расположению модулей ввода-вывода ПЛК бывают: 3. Распределенные: модули ввода-вывода выполнены в отдельных корпусах,
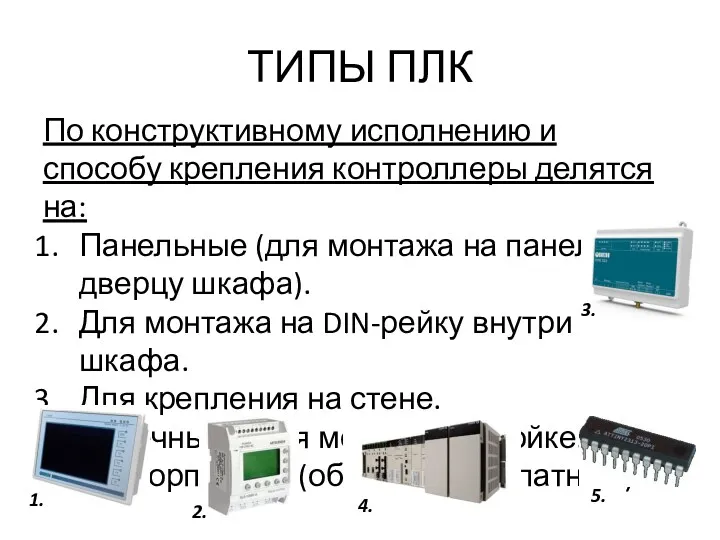
- 48. ТИПЫ ПЛК По конструктивному исполнению и способу крепления контроллеры делятся на: Панельные (для монтажа на панель
- 49. ТИПЫ ПЛК По способу программирования контроллеры бывают: программируемые с лицевой панели контроллера; программируемые переносным программатором; программируемые
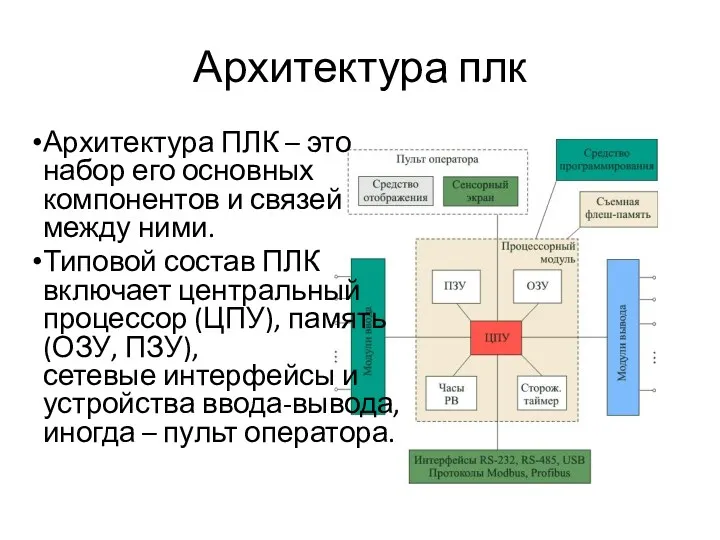
- 50. Архитектура плк Архитектура ПЛК – это набор его основных компонентов и связей между ними. Типовой состав
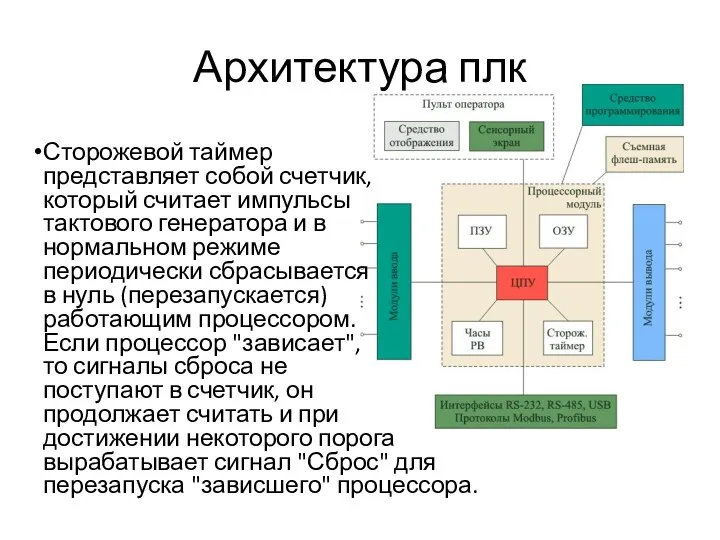
- 51. Архитектура плк Сторожевой таймер представляет собой счетчик, который считает импульсы тактового генератора и в нормальном режиме
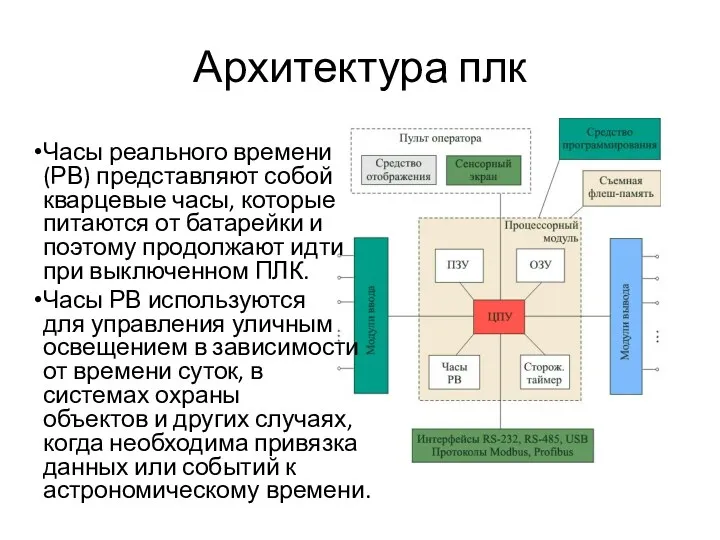
- 52. Архитектура плк Часы реального времени (РВ) представляют собой кварцевые часы, которые питаются от батарейки и поэтому
- 53. питание плк Стандартными напряжениями питания ПЛК являются напряжения 12 В, 24 и 48 В. Источником электрической
- 54. Языки программирования ПЛК Языки программирования (графические): LD – язык релейных схем; FBD – язык функциональных блоков;
- 55. Языки программирования ПЛК Языки программирования (текстовые): ассемблер, С, С++, Pascal, Basic и др.
- 56. Преимущества ПЛК ПЛК - помогают снизить влияние человеческого фактора на управляемый процесс, сократить персонал, уменьшить расход
- 57. Исполнительные устройства систем автоматики Исполнительное устройство (ИУ) – устройство системы автоматического управления, воздействующее на процесс в
- 58. Пневматические исполнительные устройства Пневматические исполнительные устройства предназначены для преобразования энергии сжатого воздуха в механическое линейное перемещение
- 59. Пневматические исполнительные устройства Пневматические исполнительные устройства бывают: одностороннего действия (возврат в исходное положение – механической пружиной);
- 60. Пневматические исполнительные устройства Передача энергии в пневмоприводе происходит следующим образом: Приводной двигатель передаёт вращающий момент на
- 61. Пневматические исполнительные устройства Достоинства пневмопривода: отсутствие необходимости возвращать рабочее тело (воздух) назад к компрессору; пожаробезопасность и
- 62. Пневматические исполнительные устройства Использование пневматических ИУ: в кормоцехах, где комбикормовая пыль является взрывоопасной; в местах повышенной
- 63. гидравлические исполнительные устройства Гидравлический привод – приведения в движение машин и механизмов посредством гидравлической энергии.
- 64. Электрические исполнительные устройства Электрические ИУ – ИУ, использующие электрическую энергию. Назначение – управление дроссельными заслонками, клапанами,
- 65. Шаговый электродвигатель Шаговый электродвигатель – это электромеханическое устройство, преобразующее сигнал управления в угловое (или линейное) перемещение
- 66. Шаговый электродвигатель Управление двигателем достигается путём чередования распределения полярностей на обмотках. При подаче на обмотку напряжения
- 67. Шаговый электродвигатель В процессе чередования полярностей на обмотках шагового двигателя его ротор на каждом шаге поворачивается
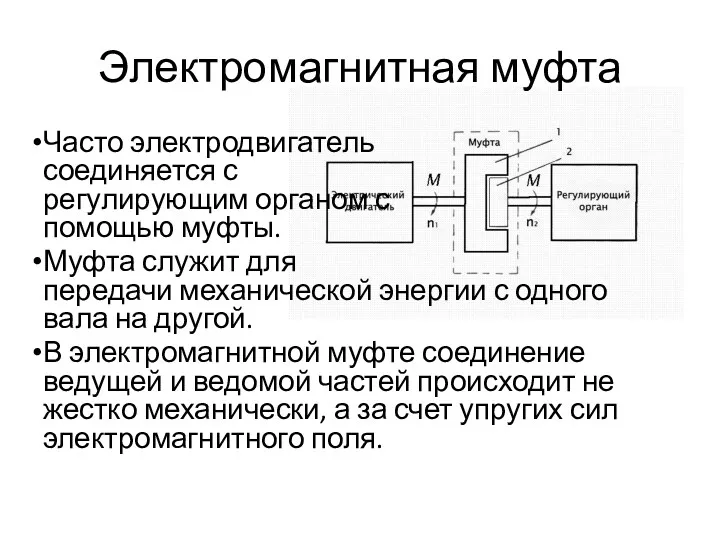
- 68. Электромагнитная муфта Часто электродвигатель соединяется с регулирующим органом с помощью муфты. Муфта служит для передачи механической
- 69. Электромагнитная муфта Это позволяет: подключать двигатель к механизму без механических ударов; осуществлять передачу движения в изолированных
- 70. Релейные устройства Реле – это автоматическое устройство, предназначенное для коммутации электрических цепей (скачкообразного изменения выходных величин).
- 71. Классификация реле
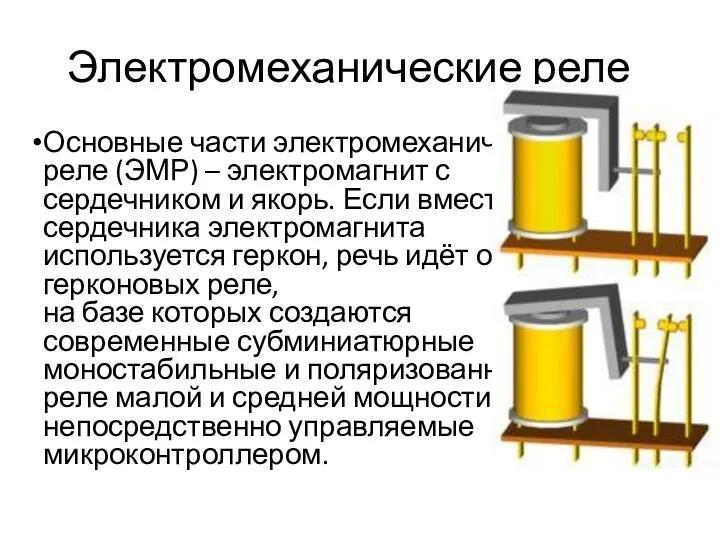
- 72. Электромеханические реле Основные части электромеханического реле (ЭМР) – электромагнит с сердечником и якорь. Если вместо сердечника
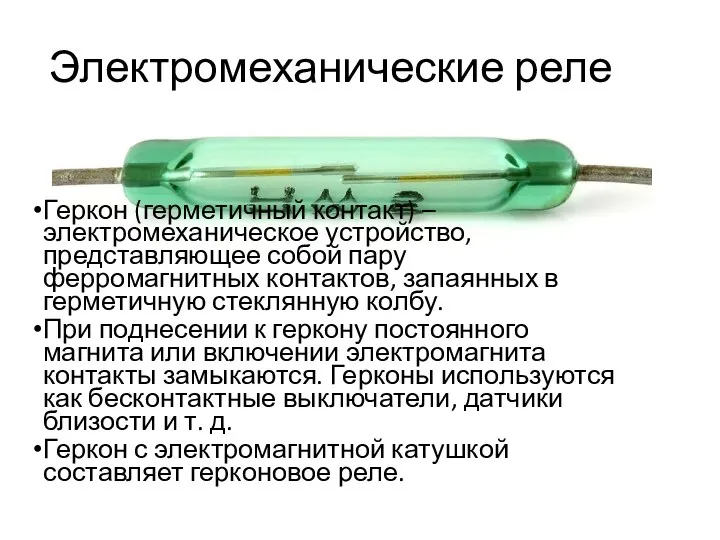
- 73. Электромеханические реле Геркон (герметичный контакт) – электромеханическое устройство, представляющее собой пару ферромагнитных контактов, запаянных в герметичную
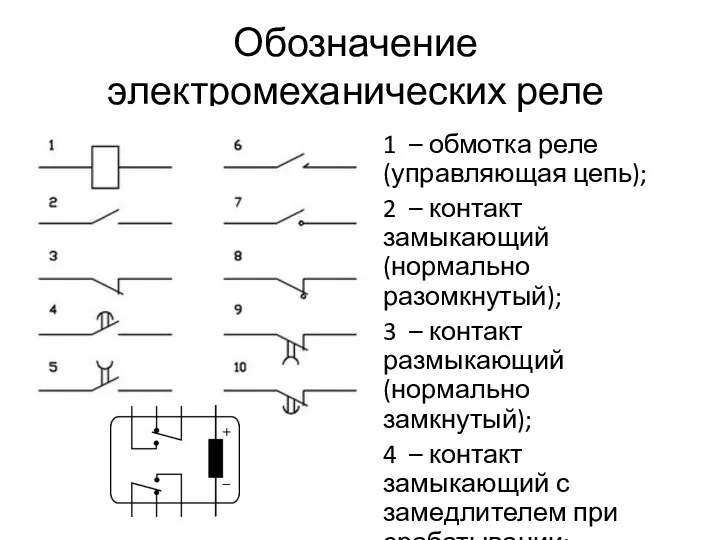
- 74. Обозначение электромеханических реле 1 – обмотка реле (управляющая цепь); 2 – контакт замыкающий (нормально разомкнутый); 3
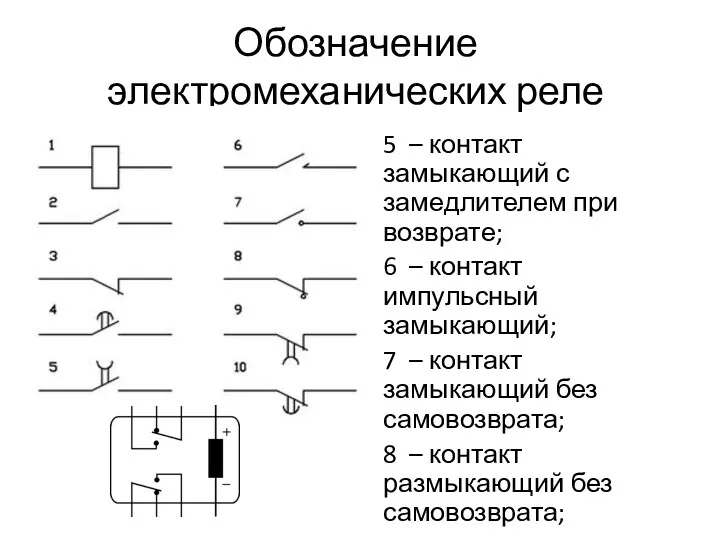
- 75. Обозначение электромеханических реле 5 – контакт замыкающий с замедлителем при возврате; 6 – контакт импульсный замыкающий;
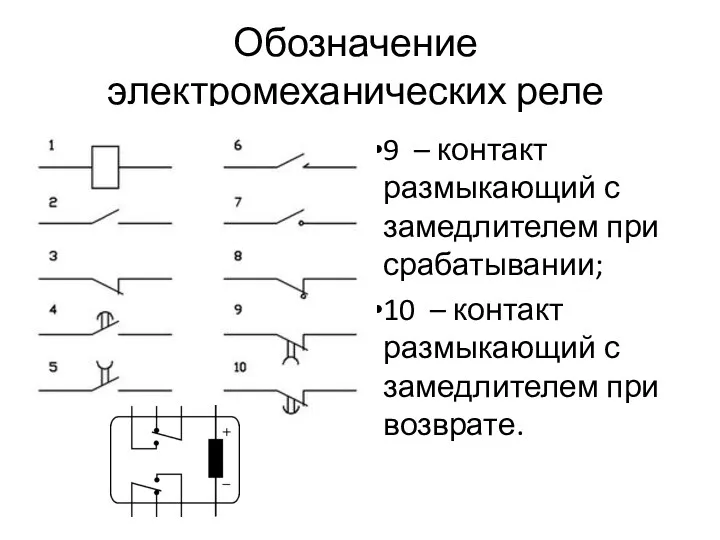
- 76. Обозначение электромеханических реле 9 – контакт размыкающий с замедлителем при срабатывании; 10 – контакт размыкающий с
- 77. Твердотельные реле Отличительная особенность твердотельного реле состоит в наличии электронной либо оптоэлектронной связи между управляющим и
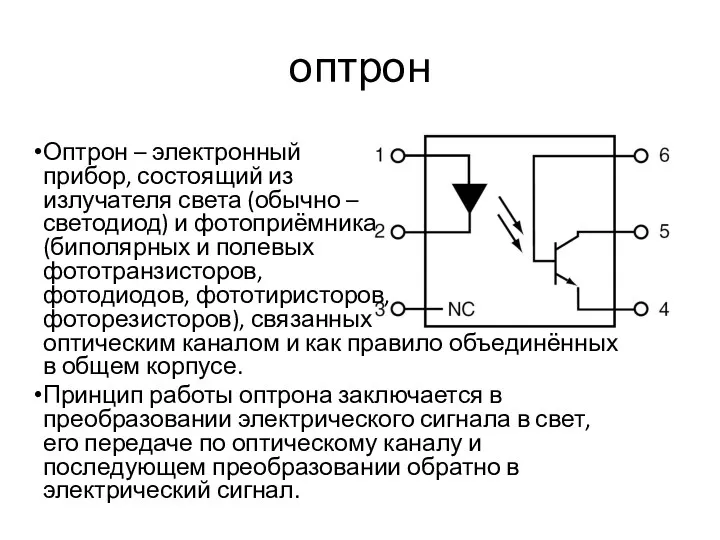
- 78. оптрон Оптрон – электронный прибор, состоящий из излучателя света (обычно – светодиод) и фотоприёмника (биполярных и
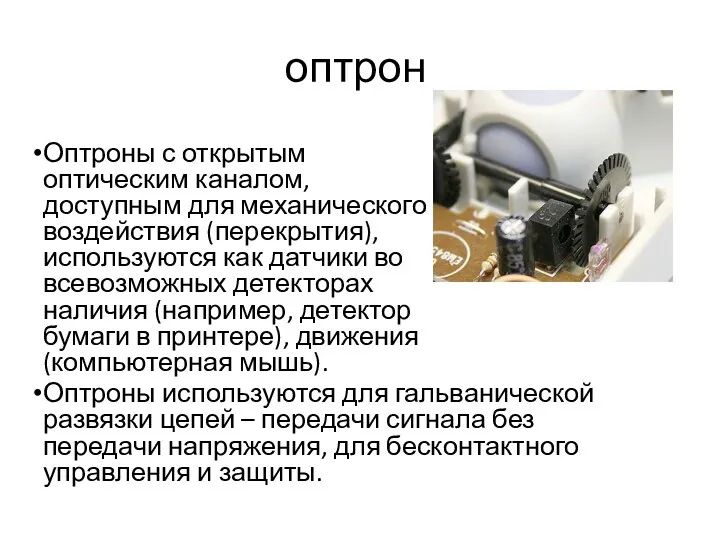
- 79. оптрон Оптроны с открытым оптическим каналом, доступным для механического воздействия (перекрытия), используются как датчики во всевозможных
- 80. оптрон Характеристики оптронов: высокие коммутируемые напряжения до 500 В при малых габаритах (порядка 8 мм х
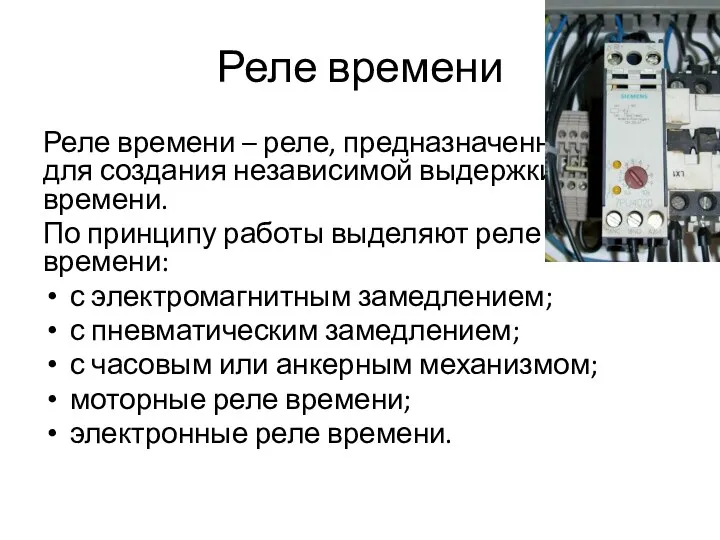
- 81. Реле времени Реле времени – реле, предназначенное для создания независимой выдержки времени. По принципу работы выделяют
- 82. Реле времени с э.-м. замедлением Электромагнитное реле времени РЭ-500: 1 – катушка; 2 – неподвижный магнитопровод;
- 83. Реле времени пневматическое Пневматическое реле времени РВП-72 имеет выдержку времени 0,2 – 180 с и предназначено
- 84. Реле времени пневматическое При подаче управляющего сигнала якорь электромагнита 1 втягивается. Шток 6, лишенный опоры, под
- 85. Реле времени пневматическое Возврат реле в исходное положение происходит при снятии входного сигнала с электромагнита под
- 86. Реле времени с часовым механизмом При подаче напряжения на обмотку 7 электромагнита плунжер 6 втягивается, сжимая
- 87. Моторные реле времени 1 – редуктор; 2 – диск времени 3 – контакты; 4 – катушка
- 88. Электронные реле времени Современные реле времени отрабатывают необходимую задержку времени в соответствии с программой, «зашитой» в
- 89. Конечный выключатель Концевой выключатель – это устройство электрической коммутации при механическом контакте пары подвижных механизмов. Малогабаритный
- 90. Конечный выключатель Часто концевой выключатель содержит две пары контактов, нормально разомкнутые и нормально замкнутые. Замкнутая пара
- 91. Электронные Усилители в системах автоматики Усилители предназначены для увеличения (от вспомогательного источника питания) мощности сигнала на
- 92. Электронные Усилители в системах автоматики Электронные усилители делят на: ламповые; полупроводниковые. В основном используются полупроводниковые усилители,
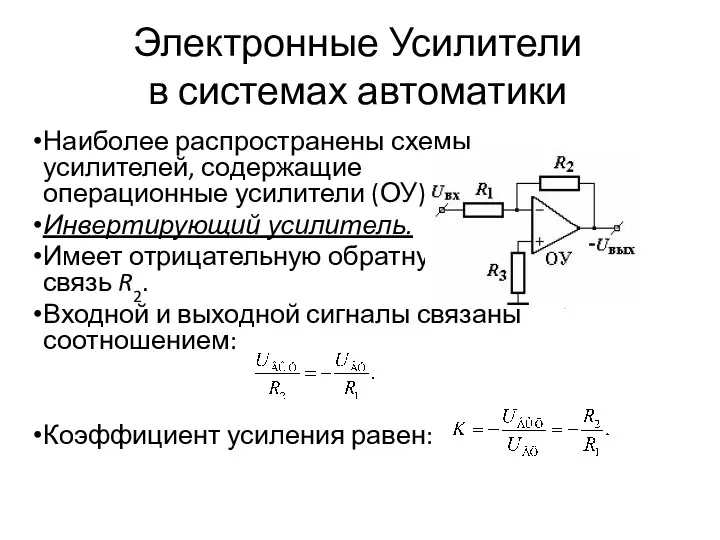
- 93. Электронные Усилители в системах автоматики Наиболее распространены схемы усилителей, содержащие операционные усилители (ОУ). Инвертирующий усилитель. Имеет
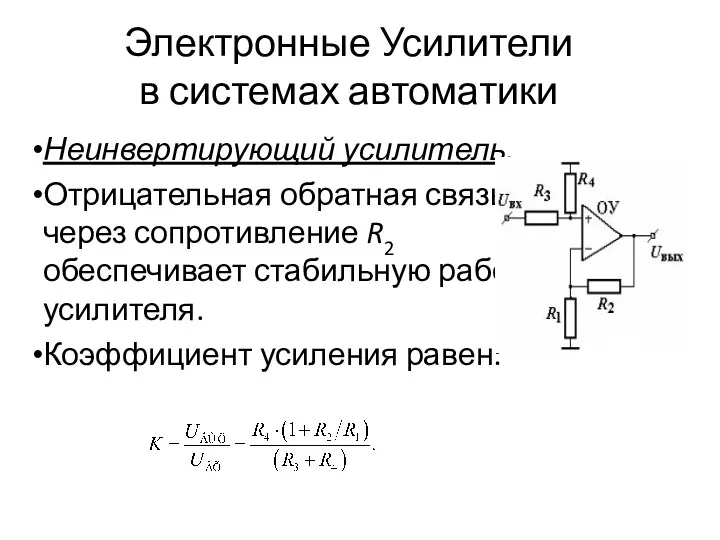
- 94. Электронные Усилители в системах автоматики Неинвертирующий усилитель. Отрицательная обратная связь через сопротивление R2 обеспечивает стабильную работу
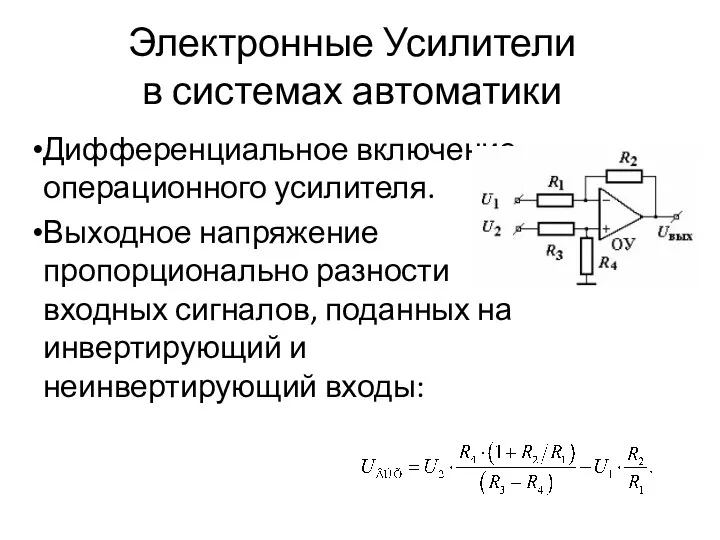
- 95. Электронные Усилители в системах автоматики Дифференциальное включение операционного усилителя. Выходное напряжение пропорционально разности входных сигналов, поданных
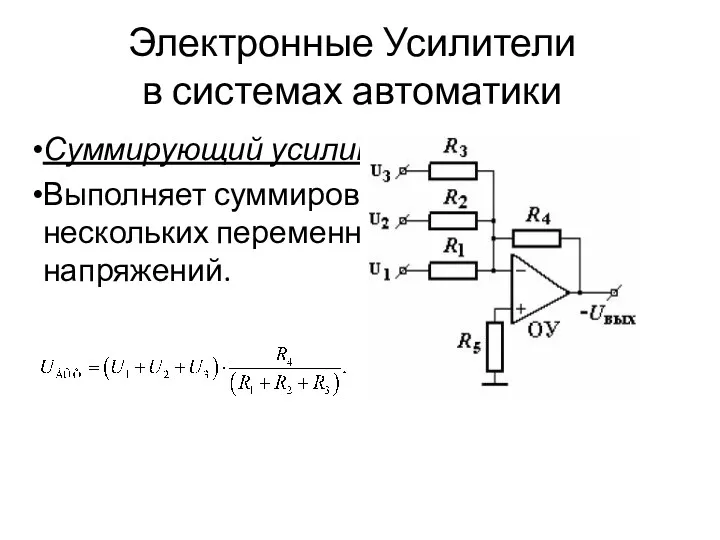
- 96. Электронные Усилители в системах автоматики Суммирующий усилитель. Выполняет суммирование нескольких переменных напряжений.
- 98. Скачать презентацию
Функции ТСА
Технические средства автоматизации выполняют следующие функции:
сбор и преобразование информации о
Функции ТСА
Технические средства автоматизации выполняют следующие функции:
сбор и преобразование информации о
Классификация ТСА
По выполняемой функции ТСА делятся на:
Первичные преобразователи – датчики.
Усилители.
Управляющие устройства.
Исполнительные
Классификация ТСА
По выполняемой функции ТСА делятся на:
Первичные преобразователи – датчики.
Усилители.
Управляющие устройства.
Исполнительные
датчики
Первичный преобразователь – чувствительный элемент, преобразующий измеряемые параметры среды в электрический
датчики
Первичный преобразователь – чувствительный элемент, преобразующий измеряемые параметры среды в электрический
Классификация датчиков
По виду выходных величин:
активные (генераторные);
пассивные (параметрические).
Пример активного датчика – активный
Классификация датчиков
По виду выходных величин:
активные (генераторные);
пассивные (параметрические).
Пример активного датчика – активный
Классификация датчиков
По измеряемому параметру:
датчики давления;
расхода;
уровня;
температуры;
концентрации ;
перемещения;
угла поворота;
фотодатчики и др.
Классификация датчиков
По измеряемому параметру:
датчики давления;
расхода;
уровня;
температуры;
концентрации ;
перемещения;
угла поворота;
фотодатчики и др.
Классификация датчиков
По принципу действия:
оптические (фотодатчики);
магнитоэлектрические (на основе эффекта Холла);
пьезоэлектрические;
тензопреобразователи;
емкостные;
потенциометрические;
индуктивные.
Классификация датчиков
По принципу действия:
оптические (фотодатчики);
магнитоэлектрические (на основе эффекта Холла);
пьезоэлектрические;
тензопреобразователи;
емкостные;
потенциометрические;
индуктивные.
Классификация датчиков
По характеру выходного сигнала:
дискретные;
аналоговые;
цифровые;
импульсные.
По среде передачи сигналов:
проводные;
беспроводные.
Классификация датчиков
По характеру выходного сигнала:
дискретные;
аналоговые;
цифровые;
импульсные.
По среде передачи сигналов:
проводные;
беспроводные.
Основные характеристики датчиков
Выбирая датчики, надо учитывать следующие их характеристики:
функциональную зависимость между
Основные характеристики датчиков
Выбирая датчики, надо учитывать следующие их характеристики:
функциональную зависимость между
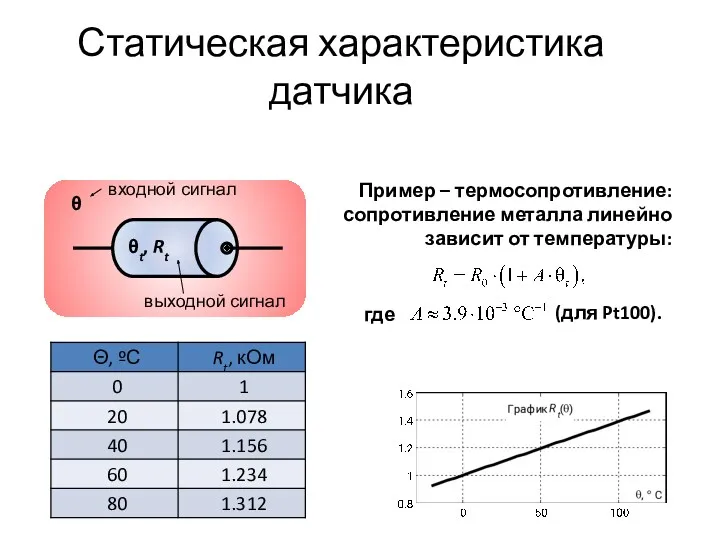
Статическая характеристика датчика
Пример – термосопротивление: сопротивление металла линейно зависит от температуры:
где
Статическая характеристика датчика
Пример – термосопротивление: сопротивление металла линейно зависит от температуры:
где
Чувствительность датчика
Чувствительность датчика – это отношение изменения выходного сигнала y к
Чувствительность датчика
Чувствительность датчика – это отношение изменения выходного сигнала y к
Динамическая характеристика датчика
Динамическая характеристика (инерционность) – определяет, как быстро датчик реагирует
Динамическая характеристика датчика
Динамическая характеристика (инерционность) – определяет, как быстро датчик реагирует
Омические датчики
Омические (резистивные) датчики – принцип действия основан на изменении их
Омические датчики
Омические (резистивные) датчики – принцип действия основан на изменении их
Омические датчики (потенциометрические)
Представляют собой резистор с изменяющимся активным сопротивлением. Входной величиной
Омические датчики (потенциометрические)
Представляют собой резистор с изменяющимся активным сопротивлением. Входной величиной
Омические датчики (тензометрические)
Служат для измерения механических напряжений, небольших деформаций, вибрации. Действие
Омические датчики (тензометрические)
Служат для измерения механических напряжений, небольших деформаций, вибрации. Действие
Омические датчики (угольные)
Угольный датчик – для измерения силы. Преобразует передаваемое на
Омические датчики (угольные)
Угольный датчик – для измерения силы. Преобразует передаваемое на
Омические датчики (угольные)
Электрическое сопротивление угольного датчика состоит из сопротивления самих дисков
Омические датчики (угольные)
Электрическое сопротивление угольного датчика состоит из сопротивления самих дисков
Электромагнитные датчики
Электромагнитные датчики основаны на использовании зависимости характеристик магнитной цепи (магнитного
Электромагнитные датчики
Электромагнитные датчики основаны на использовании зависимости характеристик магнитной цепи (магнитного

Электромагнитные датчики (индуктивные)
Принцип действия основан на изменении амплитуды колебаний генератора при
Электромагнитные датчики (индуктивные)
Принцип действия основан на изменении амплитуды колебаний генератора при
Электромагнитные датчики (трансформаторные)
Трансформаторный датчик можно рассматривать как трансформатор, у которого коэффициент
Электромагнитные датчики (трансформаторные)
Трансформаторный датчик можно рассматривать как трансформатор, у которого коэффициент
Электромагнитные датчики (магнитоупругие)
Магнитоупругий датчик – измерительный преобразователь механических усилий (деформаций) или
Электромагнитные датчики (магнитоупругие)
Магнитоупругий датчик – измерительный преобразователь механических усилий (деформаций) или
Емкостные датчики
В емкостном датчике изменение измеряемой величины преобразуется в изменение ёмкости
Емкостные датчики
В емкостном датчике изменение измеряемой величины преобразуется в изменение ёмкости
Датчики уровня
Датчики уровня – это устройства, позволяющие отслеживать количество жидкого или
Датчики уровня
Датчики уровня – это устройства, позволяющие отслеживать количество жидкого или
Емкостной Датчик уровня
В основе работы – свойство конденсатора изменять свою ёмкость
Емкостной Датчик уровня
В основе работы – свойство конденсатора изменять свою ёмкость
Емкостной Датчик уровня
При изменении уровня жидкости изменятся суммарная ёмкость конденсатора.
Достоинства: надежность,
долговечность,
Емкостной Датчик уровня
При изменении уровня жидкости изменятся суммарная ёмкость конденсатора.
Достоинства: надежность,
долговечность,
Поплавковый датчик уровня (дискретный)
Вдоль направляющей вслед за уровнем жидкости перемещается поплавок,
Поплавковый датчик уровня (дискретный)
Вдоль направляющей вслед за уровнем жидкости перемещается поплавок,
Ультразвуковые датчики уровня
Встроенные электронные схемы
генерируют ультразвуковой
импульс, который проходит через
Ультразвуковые датчики уровня
Встроенные электронные схемы генерируют ультразвуковой импульс, который проходит через
датчики уровня
радарного типа
По принципу работы – похожи на
ультразвуковые датчики.
В отличие
датчики уровня
радарного типа
По принципу работы – похожи на
ультразвуковые датчики.
В отличие
Гидростатические датчики уровня
Гидростатические датчики
уровня представляют собой
датчик давления, который
находится
Гидростатические датчики уровня
Гидростатические датчики уровня представляют собой датчик давления, который находится
Вибрационные датчики уровня
Вибрационный датчик уровня
состоит из вилки
(чувствительный элемент) и
Вибрационные датчики уровня
Вибрационный датчик уровня состоит из вилки (чувствительный элемент) и
Датчики давления
По принципу работы датчики давления бывают:
тензометрические;
пьезорезистивные;
емкостные;
индуктивные, резонансные и др.
Датчики давления
По принципу работы датчики давления бывают:
тензометрические;
пьезорезистивные;
емкостные;
индуктивные, резонансные и др.
Тензометрические датчики давления
Чувствительный элемент – мембрана с тензорезисторами, соединенными в мостовую
Тензометрические датчики давления
Чувствительный элемент – мембрана с тензорезисторами, соединенными в мостовую

Пьезорезистивные датчики давления
Чувствительный элемент –
включенный в мостовую схему
пленочный пьезорезистор.
Пьезорезистор
Пьезорезистивные датчики давления
Чувствительный элемент –
включенный в мостовую схему
пленочный пьезорезистор.
Пьезорезистор
Емкостной датчик давления
Принцип – изменение емкости конденсатора при изменении расстояния между
Емкостной датчик давления
Принцип – изменение емкости конденсатора при изменении расстояния между
Датчики расхода (расходомеры)
Используется свойство
звуковых волн
изменять скорость
своего распространения
в
Датчики расхода (расходомеры)
Используется свойство звуковых волн изменять скорость своего распространения в
Расходомер на эффекте Допплера
Частота ультразвука,
которую фиксирует
приёмник, изменяется в
зависимости
Расходомер на эффекте Допплера
Частота ультразвука, которую фиксирует приёмник, изменяется в зависимости
Электромагнитный расходомер
Если жидкость проводит ток, её
перемещение поперёк линий
магнитного поля
Электромагнитный расходомер
Если жидкость проводит ток, её перемещение поперёк линий магнитного поля
Фотоэлектрические датчики
Фотоэлектрические датчики (фотодатчики) используются в автоматике для преобразования в электрический
Фотоэлектрические датчики
Фотоэлектрические датчики (фотодатчики) используются в автоматике для преобразования в электрический
Фотоэлектрические датчики
Фотодатчики, у которых световой поток изменяется за счет перемещения объекта
Фотоэлектрические датчики
Фотодатчики, у которых световой поток изменяется за счет перемещения объекта
Фотоэлектрические датчики
Фотодатчики, у которых световой поток создается объектом управления.
Световой поток, излучаемый
Фотоэлектрические датчики
Фотодатчики, у которых световой поток создается объектом управления.
Световой поток, излучаемый
Фотоэлектрические первичные преобразователи
Фотоэлектрические первичный преобразователь (чувствительный элемент) – основной элемент фотодатчика,
Фотоэлектрические первичные преобразователи
Фотоэлектрические первичный преобразователь (чувствительный элемент) – основной элемент фотодатчика,
Фотоэлектрические первичные преобразователи
Фотодиод – полупроводниковый диод, в котором оптического излучения поглощается
Фотоэлектрические первичные преобразователи
Фотодиод – полупроводниковый диод, в котором оптического излучения поглощается
Фотоэлектрические первичные преобразователи
Фототранзистор – фотогальванический приемник излучения с внутренним усилением, который
Фотоэлектрические первичные преобразователи
Фототранзистор – фотогальванический приемник излучения с внутренним усилением, который
Управляющие устройства автоматики
Программируемый логический контроллер – микросхема, предназначенная для управления электронными
Управляющие устройства автоматики
Программируемый логический контроллер – микросхема, предназначенная для управления электронными
ТИПЫ ПЛК
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку
ТИПЫ ПЛК
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку

ТИПЫ ПЛК
По расположению модулей ввода-вывода ПЛК бывают:
1. Моноблочные: модули
ввода-вывода
ТИПЫ ПЛК
По расположению модулей ввода-вывода ПЛК бывают:
1. Моноблочные: модули
ввода-вывода
ТИПЫ ПЛК
По расположению модулей ввода-вывода ПЛК бывают:
3. Распределенные: модули ввода-вывода
ТИПЫ ПЛК
По расположению модулей ввода-вывода ПЛК бывают:
3. Распределенные: модули ввода-вывода
ТИПЫ ПЛК
По конструктивному исполнению и способу крепления контроллеры делятся на:
Панельные (для
ТИПЫ ПЛК
По конструктивному исполнению и способу крепления контроллеры делятся на:
Панельные (для
ТИПЫ ПЛК
По способу программирования контроллеры бывают:
программируемые с лицевой панели контроллера;
программируемые переносным
ТИПЫ ПЛК
По способу программирования контроллеры бывают:
программируемые с лицевой панели контроллера;
программируемые переносным
Архитектура плк
Архитектура ПЛК – это
набор его основных
компонентов и связей
между
Архитектура плк
Архитектура ПЛК – это набор его основных компонентов и связей между
Архитектура плк
Сторожевой таймер
представляет собой счетчик,
который считает импульсы
тактового генератора
Архитектура плк
Сторожевой таймер представляет собой счетчик, который считает импульсы тактового генератора
Архитектура плк
Часы реального времени
(РВ) представляют собой
кварцевые часы, которые
питаются
Архитектура плк
Часы реального времени (РВ) представляют собой кварцевые часы, которые питаются
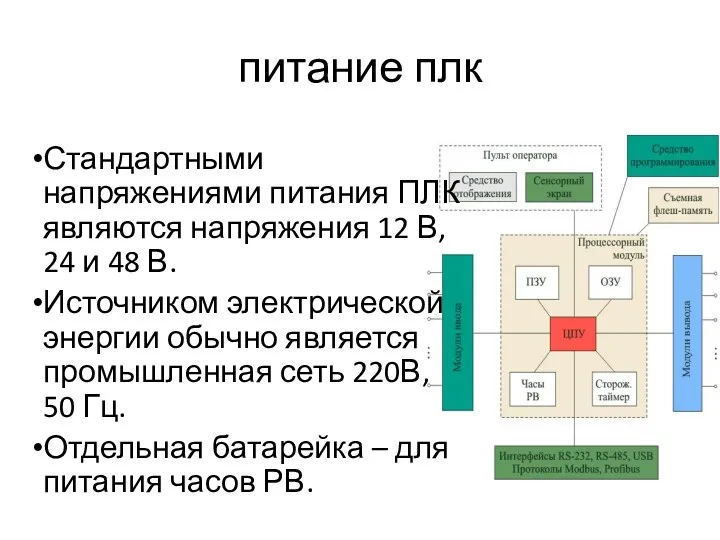
питание плк
Стандартными
напряжениями питания ПЛК
являются напряжения 12 В,
24 и
питание плк
Стандартными напряжениями питания ПЛК являются напряжения 12 В, 24 и
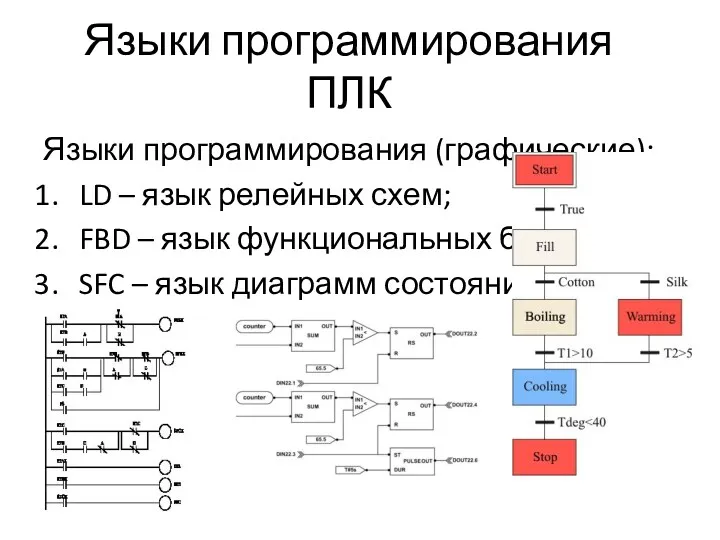
Языки программирования ПЛК
Языки программирования (графические):
LD – язык релейных схем;
FBD – язык
Языки программирования ПЛК
Языки программирования (графические):
LD – язык релейных схем;
FBD – язык
Языки программирования ПЛК
Языки программирования (текстовые): ассемблер, С, С++, Pascal, Basic и
Языки программирования ПЛК
Языки программирования (текстовые): ассемблер, С, С++, Pascal, Basic и
Преимущества ПЛК
ПЛК - помогают снизить влияние человеческого фактора на управляемый процесс,
Преимущества ПЛК
ПЛК - помогают снизить влияние человеческого фактора на управляемый процесс,
Исполнительные устройства систем автоматики
Исполнительное устройство (ИУ) – устройство системы автоматического управления,
Исполнительные устройства систем автоматики
Исполнительное устройство (ИУ) – устройство системы автоматического управления,
Пневматические исполнительные устройства
Пневматические исполнительные устройства предназначены для преобразования энергии сжатого воздуха
Пневматические исполнительные устройства
Пневматические исполнительные устройства предназначены для преобразования энергии сжатого воздуха

Пневматические исполнительные устройства
Пневматические исполнительные устройства бывают:
одностороннего действия (возврат в исходное положение
Пневматические исполнительные устройства
Пневматические исполнительные устройства бывают:
одностороннего действия (возврат в исходное положение
Пневматические исполнительные устройства
Передача энергии в пневмоприводе происходит следующим образом:
Приводной двигатель передаёт
Пневматические исполнительные устройства
Передача энергии в пневмоприводе происходит следующим образом:
Приводной двигатель передаёт
Пневматические исполнительные устройства
Достоинства пневмопривода:
отсутствие необходимости возвращать рабочее тело (воздух) назад к
Пневматические исполнительные устройства
Достоинства пневмопривода:
отсутствие необходимости возвращать рабочее тело (воздух) назад к
Пневматические исполнительные устройства
Использование пневматических ИУ:
в кормоцехах, где комбикормовая пыль является
Пневматические исполнительные устройства
Использование пневматических ИУ:
в кормоцехах, где комбикормовая пыль является

гидравлические исполнительные устройства
Гидравлический привод – приведения в движение машин и механизмов
гидравлические исполнительные устройства
Гидравлический привод – приведения в движение машин и механизмов
Электрические исполнительные устройства
Электрические ИУ – ИУ, использующие электрическую энергию.
Назначение – управление
Электрические исполнительные устройства
Электрические ИУ – ИУ, использующие электрическую энергию.
Назначение – управление

Шаговый электродвигатель
Шаговый электродвигатель – это электромеханическое устройство, преобразующее сигнал управления в
Шаговый электродвигатель
Шаговый электродвигатель – это электромеханическое устройство, преобразующее сигнал управления в

Шаговый электродвигатель
Управление двигателем достигается путём чередования распределения полярностей на обмотках.
При подаче
Шаговый электродвигатель
Управление двигателем достигается путём чередования распределения полярностей на обмотках.
При подаче
Шаговый электродвигатель
В процессе чередования полярностей на обмотках шагового двигателя его ротор
Шаговый электродвигатель
В процессе чередования полярностей на обмотках шагового двигателя его ротор
Электромагнитная муфта
Часто электродвигатель
соединяется с
регулирующим органом с
помощью муфты.
Муфта служит для
Электромагнитная муфта
Часто электродвигатель
соединяется с
регулирующим органом с
помощью муфты.
Муфта служит для
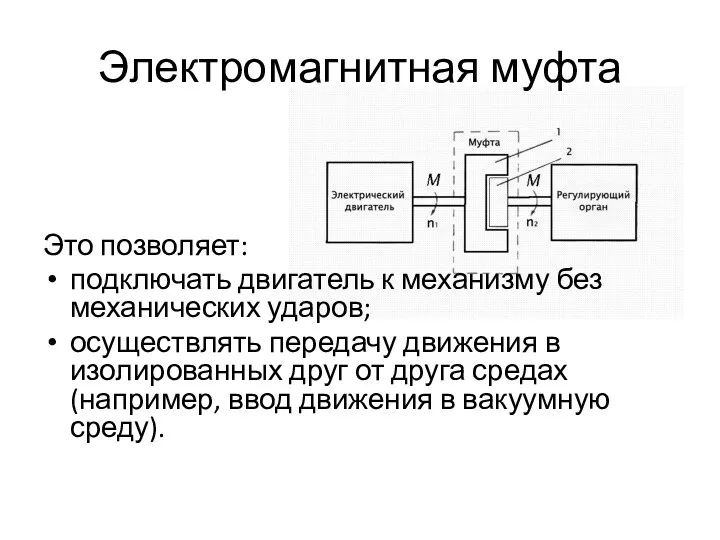
Электромагнитная муфта
Это позволяет:
подключать двигатель к механизму без механических ударов;
осуществлять передачу движения
Электромагнитная муфта
Это позволяет:
подключать двигатель к механизму без механических ударов;
осуществлять передачу движения
Релейные устройства
Реле – это автоматическое устройство, предназначенное для коммутации электрических цепей
Релейные устройства
Реле – это автоматическое устройство, предназначенное для коммутации электрических цепей
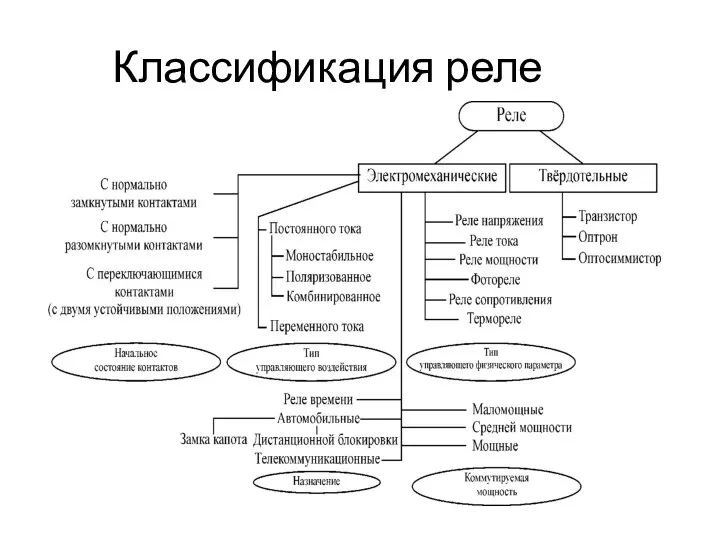
Классификация реле
Классификация реле
Электромеханические реле
Основные части электромеханического
реле (ЭМР) – электромагнит с
сердечником и
Электромеханические реле
Основные части электромеханического реле (ЭМР) – электромагнит с сердечником и
Электромеханические реле
Геркон (герметичный контакт) – электромеханическое устройство, представляющее собой пару ферромагнитных
Электромеханические реле
Геркон (герметичный контакт) – электромеханическое устройство, представляющее собой пару ферромагнитных
Обозначение электромеханических реле
1 – обмотка реле (управляющая цепь);
2 – контакт замыкающий
Обозначение электромеханических реле
1 – обмотка реле (управляющая цепь);
2 – контакт замыкающий
Обозначение электромеханических реле
5 – контакт замыкающий с замедлителем при возврате;
6 –
Обозначение электромеханических реле
5 – контакт замыкающий с замедлителем при возврате;
6 –
Обозначение электромеханических реле
9 – контакт размыкающий с замедлителем при срабатывании;
10 –
Обозначение электромеханических реле
9 – контакт размыкающий с замедлителем при срабатывании;
10 –
Твердотельные реле
Отличительная особенность твердотельного реле состоит в наличии электронной либо оптоэлектронной
Твердотельные реле
Отличительная особенность твердотельного реле состоит в наличии электронной либо оптоэлектронной
оптрон
Оптрон – электронный
прибор, состоящий из
излучателя света (обычно –
светодиод)
оптрон
Оптрон – электронный прибор, состоящий из излучателя света (обычно – светодиод)
оптрон
Оптроны с открытым
оптическим каналом,
доступным для механического
воздействия (перекрытия),
используются
оптрон
Оптроны с открытым оптическим каналом, доступным для механического воздействия (перекрытия), используются

оптрон
Характеристики оптронов:
высокие коммутируемые
напряжения до 500 В при
малых габаритах
оптрон
Характеристики оптронов:
высокие коммутируемые
напряжения до 500 В при
малых габаритах
Реле времени
Реле времени – реле, предназначенное
для создания независимой выдержки
времени.
По
Реле времени
Реле времени – реле, предназначенное
для создания независимой выдержки
времени.
По
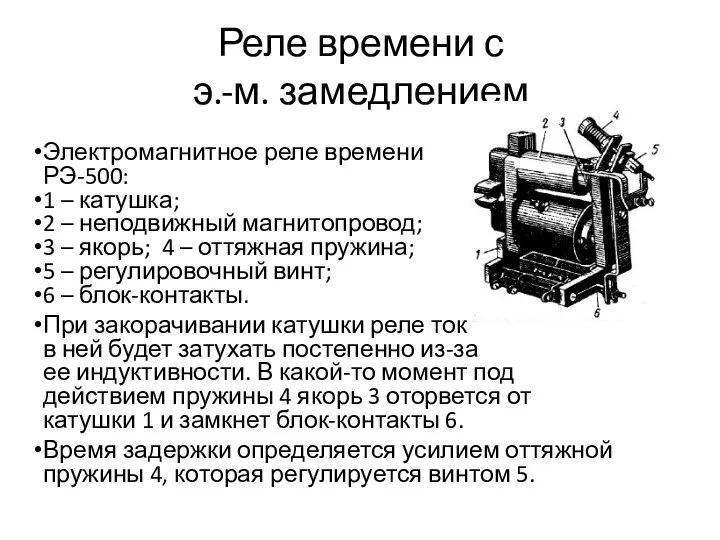
Реле времени с
э.-м. замедлением
Электромагнитное реле времени
РЭ-500:
1 – катушка;
2 – неподвижный
Реле времени с
э.-м. замедлением
Электромагнитное реле времени
РЭ-500:
1 – катушка;
2 – неподвижный
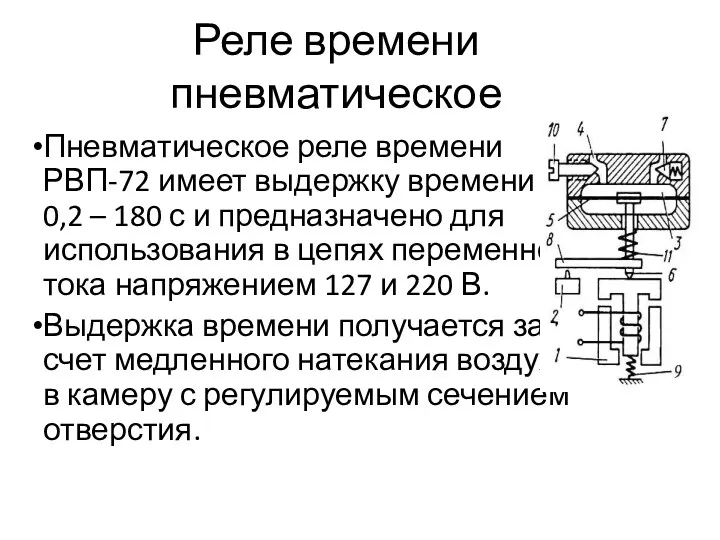
Реле времени пневматическое
Пневматическое реле времени
РВП-72 имеет выдержку времени
0,2 –
Реле времени пневматическое
Пневматическое реле времени РВП-72 имеет выдержку времени 0,2 –
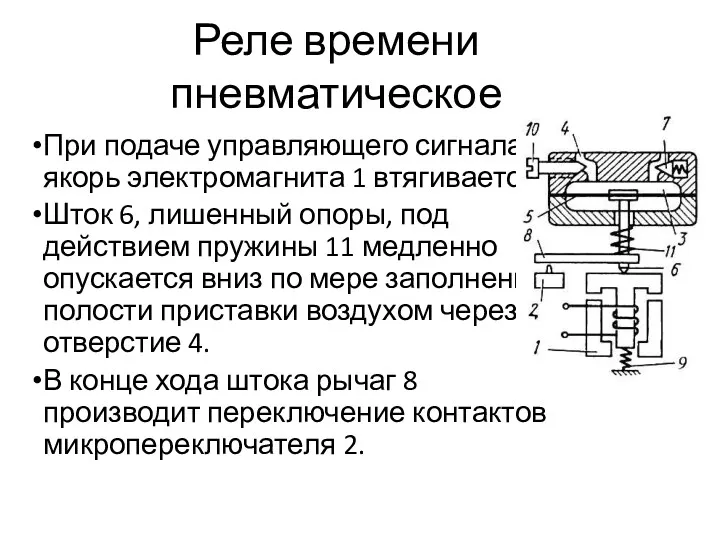
Реле времени пневматическое
При подаче управляющего сигнала
якорь электромагнита 1 втягивается.
Шток 6, лишенный
Реле времени пневматическое
При подаче управляющего сигнала
якорь электромагнита 1 втягивается.
Шток 6, лишенный
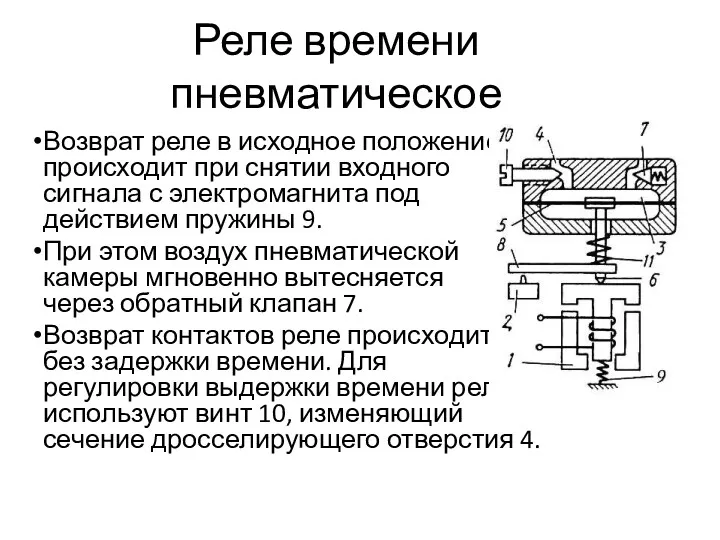
Реле времени пневматическое
Возврат реле в исходное положение
происходит при снятии входного
Реле времени пневматическое
Возврат реле в исходное положение происходит при снятии входного
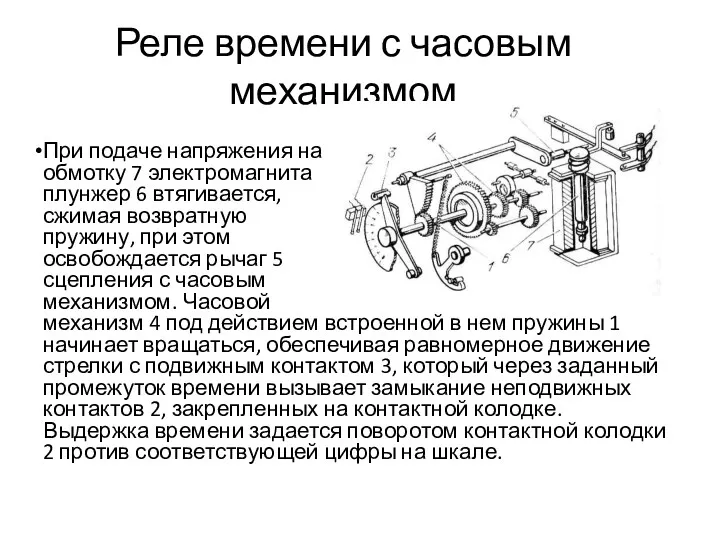
Реле времени с часовым механизмом
При подаче напряжения на
обмотку 7 электромагнита
Реле времени с часовым механизмом
При подаче напряжения на обмотку 7 электромагнита
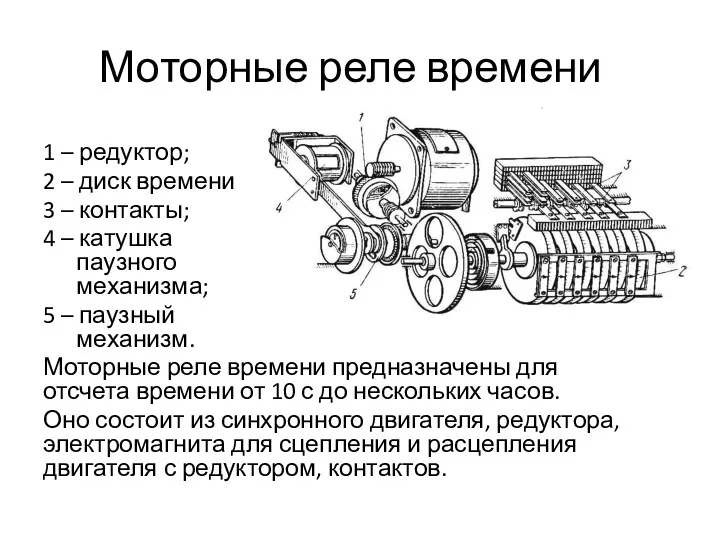
Моторные реле времени
1 – редуктор;
2 – диск времени
3 – контакты;
4 –
Моторные реле времени
1 – редуктор;
2 – диск времени
3 – контакты;
4 –
Электронные реле времени
Современные реле времени
отрабатывают необходимую
задержку времени в
соответствии
Электронные реле времени
Современные реле времени отрабатывают необходимую задержку времени в соответствии
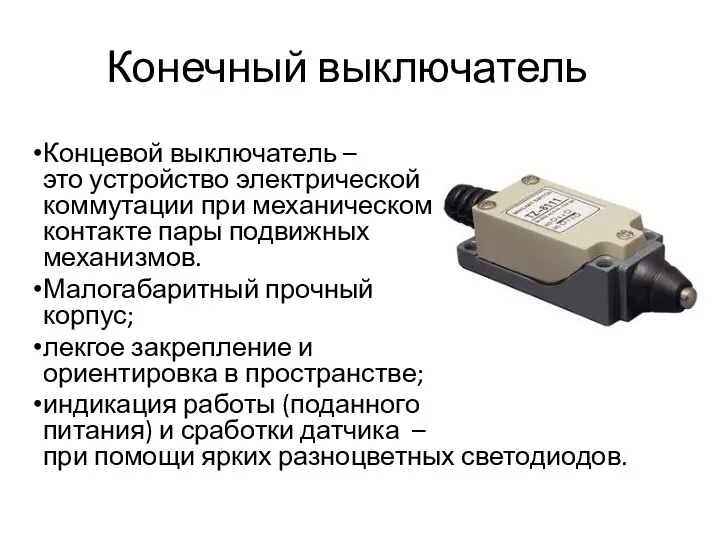
Конечный выключатель
Концевой выключатель –
это устройство электрической
коммутации при механическом
контакте пары подвижных
механизмов.
Малогабаритный
Конечный выключатель
Концевой выключатель –
это устройство электрической
коммутации при механическом
контакте пары подвижных
механизмов.
Малогабаритный
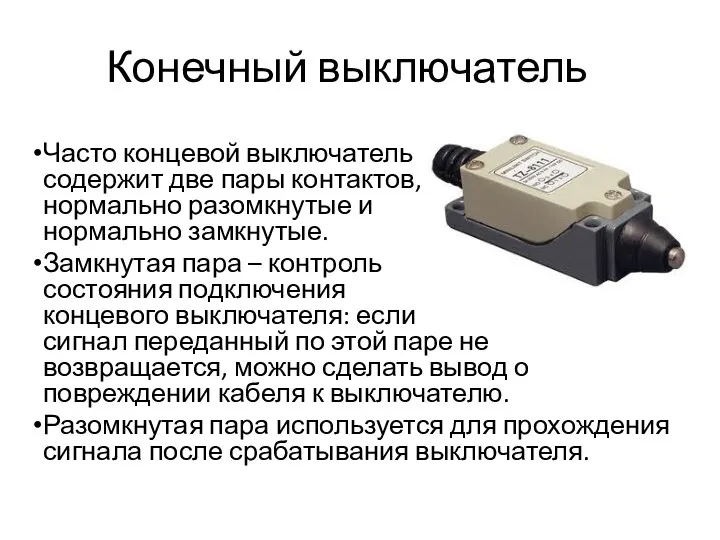
Конечный выключатель
Часто концевой выключатель
содержит две пары контактов,
нормально разомкнутые и
Конечный выключатель
Часто концевой выключатель содержит две пары контактов, нормально разомкнутые и
Электронные Усилители
в системах автоматики
Усилители предназначены для увеличения (от вспомогательного источника
Электронные Усилители
в системах автоматики
Усилители предназначены для увеличения (от вспомогательного источника
Электронные Усилители
в системах автоматики
Электронные усилители делят на:
ламповые;
полупроводниковые.
В основном используются полупроводниковые
Электронные Усилители
в системах автоматики
Электронные усилители делят на:
ламповые;
полупроводниковые.
В основном используются полупроводниковые
Электронные Усилители
в системах автоматики
Наиболее распространены схемы
усилителей, содержащие
операционные усилители
Электронные Усилители
в системах автоматики
Наиболее распространены схемы усилителей, содержащие операционные усилители
Электронные Усилители
в системах автоматики
Неинвертирующий усилитель.
Отрицательная обратная связь
через сопротивление R2
Электронные Усилители
в системах автоматики
Неинвертирующий усилитель.
Отрицательная обратная связь
через сопротивление R2
Электронные Усилители
в системах автоматики
Дифференциальное включение
операционного усилителя.
Выходное напряжение
пропорционально разности
входных
Электронные Усилители
в системах автоматики
Дифференциальное включение
операционного усилителя.
Выходное напряжение
пропорционально разности
входных
Электронные Усилители
в системах автоматики
Суммирующий усилитель.
Выполняет суммирование
нескольких переменных
напряжений.
Электронные Усилители
в системах автоматики
Суммирующий усилитель.
Выполняет суммирование
нескольких переменных
напряжений.
 Картографические проекции
Картографические проекции Простейшие тригонометрические уравнения
Простейшие тригонометрические уравнения Шахматы 1 класс. Начальное положение. Шахматная нотация.
Шахматы 1 класс. Начальное положение. Шахматная нотация. Команди МП 8088/86. Зміст команд. Лекция 8
Команди МП 8088/86. Зміст команд. Лекция 8 Масленица
Масленица Знаменитые люди нашего района.
Знаменитые люди нашего района. Порядок слов в предложении
Порядок слов в предложении Камиль Амирханов. Индивидуальное и корпоративное сопровождение по личной эффективности
Камиль Амирханов. Индивидуальное и корпоративное сопровождение по личной эффективности Фирма в теории организации рынков
Фирма в теории организации рынков Понятие и сущность права. Отрасли права
Понятие и сущность права. Отрасли права Воля, эмоции, внимание. Темперамент
Воля, эмоции, внимание. Темперамент Вводный учебный курс для новых дилеров Audi. Двигатели
Вводный учебный курс для новых дилеров Audi. Двигатели Упрощенная система налогообложения
Упрощенная система налогообложения Загадки
Загадки Машины для подготовительных работ. Бульдозеры и их рабочее оборудование
Машины для подготовительных работ. Бульдозеры и их рабочее оборудование Школа Пифагора
Школа Пифагора Информационные системы
Информационные системы Социальные патологии и подходы к их профилактике
Социальные патологии и подходы к их профилактике БЕГ НА КОРОТКИЕ ДИСТАНЦИИ
БЕГ НА КОРОТКИЕ ДИСТАНЦИИ Токарные станки
Токарные станки Наблюдение и уход за больными с заболеваниями органов кровообращения
Наблюдение и уход за больными с заболеваниями органов кровообращения Частотні канали
Частотні канали Ковыктинское месторождение
Ковыктинское месторождение Изготовление изделия из природного материала с использованием техники соединения пластилином
Изготовление изделия из природного материала с использованием техники соединения пластилином Организация пассажирских перевозок в пригородном сообщении
Организация пассажирских перевозок в пригородном сообщении Искусство Японии
Искусство Японии 100 книг, которые нужно прочитать, чтобы понимать себя и друг друга
100 книг, которые нужно прочитать, чтобы понимать себя и друг друга Презентация к внеклассному мероприятию Защитим водоёмы от загрязнения Диск
Презентация к внеклассному мероприятию Защитим водоёмы от загрязнения Диск