- Требования государственных стандартов к уравновешенности роторов

Содержание
- 2. ОБЛАСТЬ ПРИМЕНЕНИЯ Стандарт устанавливает классификацию гибких роторов (в соответствии с особенностями конструкции и методами балансировки), методы
- 3. НОРМАТИВНЫЕ ССЫЛКИ ГОСТ ИСО 1940-2-99 Вибрация. Требования к качеству балансировки жестких роторов. Часть 2. Учет погрешностей
- 4. ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ Критическая скорость (гибкого ротора): Скорость вращения ротора, на которой он претерпевает максимальный изгиб,
- 5. ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ Полигармоническая вибрация: Вибрация, составляющие которой расположены на частотах, кратных частоте вращения. Примечание -
- 6. ОСНОВЫ ДИНАМИКИ И БАЛАНСИРОВКИ ГИБКИХ РОТОРОВ Общие положения Обычно гибкие роторы требуют проведения многоплоскостной балансировки на
- 7. РАСПРЕДЕЛЕНИЕ ДИСБАЛАНСА Конструкция и методы изготовления ротора оказывают существенное влияние на значение и распределение дисбаланса вдоль
- 8. СОБСТВЕННЫЕ МОДЫ ВИБРАЦИИ Если демпфирование ротора пренебрежимо мало, то моды ротора совпадают с собственными модами изгибных
- 9. СОБСТВЕННЫЕ МОДЫ ВИБРАЦИИ Схематическое изображение форм мод гибких роторов на податливых опорах Пример форм мод колебаний
- 10. ВОЗДЕЙСТВИЕ ДИСБАЛАНСА НА ГИБКИЙ РОТОР Распределение дисбаланса может быть выражено через модальные дисбалансы. Амплитуда каждой моды
- 11. ЦЕЛЬ БАЛАНСИРОВКИ ГИБКОГО РОТОРА Цель балансировки зависит от требований к эксплуатации машины. Перед балансировкой следует определить
- 12. ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ И ЧИСЛА ПЛОСКОСТЕЙ КОРРЕКЦИИ Число необходимых плоскостей коррекции вдоль оси ротора зависит от применяемого
- 13. БАЛАНСИРОВКА ВАЛОПРОВОДОВ Валопровод, состоящий из нескольких роторов, имеет несколько критических частот вращения (и, соответственно, несколько собственных
- 14. МЕТОДЫ БАЛАНСИРОВКИ ГИБКИХ РОТОРОВ НА НИЗКИХ СКОРОСТЯХ ВРАЩЕНИЯ Выбор плоскостей коррекции Если места сосредоточения дисбалансов вдоль
- 15. МЕТОДЫ НИЗКОСКОРОСТНОЙ БАЛАНСИРОВКИ Одноплоскостная балансировка Если начальный дисбаланс сосредоточен преимущественным образом в одной поперечной плоскости и
- 16. ПОСЛЕДУЮЩАЯ БАЛАНСИРОВКА ПРИ КОНТРОЛЕ НАЧАЛЬНОГО ДИСБАЛАНСА Ротор, собранный из уравновешенных элементов, может, тем не менее, иметь
- 17. БАЛАНСИРОВКА НА ЭТАПАХ СБОРКИ Предварительно уравновешивают вал. После этого ротор подвергают балансировке каждый раз, когда на
- 18. БАЛАНСИРОВКА В ОПТИМАЛЬНЫХ ПЛОСКОСТЯХ Если из-за особенностей конструкции или метода изготовления роторы одной серии имеют дисбаланс,
- 19. КРИТЕРИИ ОЦЕНКИ КАЧЕСТВА БАЛАНСИРОВКИ Критерии оценки качества балансировки выражают либо через предельные значения вибрации, либо через
- 20. Допустимые значения вибрации на балансировочном оборудовании Возможны два способа определения допустимой вибрации при балансировке на балансировочном
- 21. Значения K1 и K2 могут изменяться в широких пределах и зависят от скорости. Некоторые рекомендации по
- 22. ОЦЕНКА ВИБРАЦИИ Оценка вибрации на испытательном стенде Ротор, состояние уравновешенности которого окончательно оценивают на испытательном стенде,
- 23. ОЦЕНКА ВИБРАЦИИ Оценка на низкой скорости вращения Оценка состояния уравновешенности на низкой скорости вращения основана на
- 24. ФАКТОРЫ, ВЛИЯЮЩИЕ НА ОЦЕНКУ УРАВНОВЕШЕННОСТИ РОТОРА ПО РЕЗУЛЬТАТАМ ИЗМЕРЕНИЙ НА МЕСТЕ ЭКСПЛУАТАЦИИ Дисбаланс не является единственной
- 25. НИЗКОСКОРОСТНАЯ БАЛАНСИРОВКА РОТОРОВ В ТРЕХ ОПТИМАЛЬНЫХ ПЛОСКОСТЯХ (ПРИЛОЖЕНИЕ) В данном приложении рассмотрена низкоскоростная балансировка роторов, имеющих
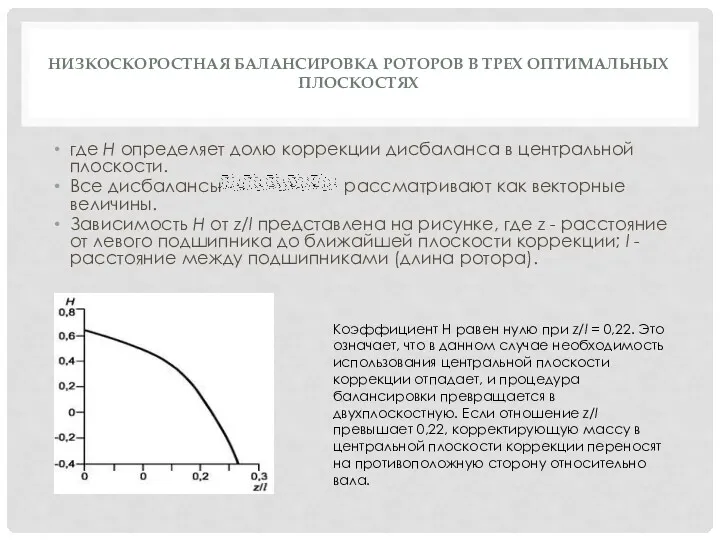
- 26. НИЗКОСКОРОСТНАЯ БАЛАНСИРОВКА РОТОРОВ В ТРЕХ ОПТИМАЛЬНЫХ ПЛОСКОСТЯХ где H определяет долю коррекции дисбаланса в центральной плоскости.
- 28. Скачать презентацию
ОБЛАСТЬ ПРИМЕНЕНИЯ
Стандарт устанавливает классификацию гибких роторов (в соответствии с особенностями конструкции
ОБЛАСТЬ ПРИМЕНЕНИЯ
Стандарт устанавливает классификацию гибких роторов (в соответствии с особенностями конструкции
НОРМАТИВНЫЕ ССЫЛКИ
ГОСТ ИСО 1940-2-99 Вибрация. Требования к качеству балансировки жестких роторов.
НОРМАТИВНЫЕ ССЫЛКИ
ГОСТ ИСО 1940-2-99 Вибрация. Требования к качеству балансировки жестких роторов.
ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
Критическая скорость (гибкого ротора): Скорость вращения ротора, на которой
ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
Критическая скорость (гибкого ротора): Скорость вращения ротора, на которой
ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
Полигармоническая вибрация: Вибрация, составляющие которой расположены на частотах, кратных
ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
Полигармоническая вибрация: Вибрация, составляющие которой расположены на частотах, кратных
ОСНОВЫ ДИНАМИКИ И БАЛАНСИРОВКИ ГИБКИХ РОТОРОВ
Общие положения
Обычно гибкие роторы требуют проведения
ОСНОВЫ ДИНАМИКИ И БАЛАНСИРОВКИ ГИБКИХ РОТОРОВ
Общие положения
Обычно гибкие роторы требуют проведения
РАСПРЕДЕЛЕНИЕ ДИСБАЛАНСА
Конструкция и методы изготовления ротора оказывают существенное влияние на значение
РАСПРЕДЕЛЕНИЕ ДИСБАЛАНСА
Конструкция и методы изготовления ротора оказывают существенное влияние на значение
СОБСТВЕННЫЕ МОДЫ ВИБРАЦИИ
Если демпфирование ротора пренебрежимо мало, то моды ротора совпадают
СОБСТВЕННЫЕ МОДЫ ВИБРАЦИИ
Если демпфирование ротора пренебрежимо мало, то моды ротора совпадают
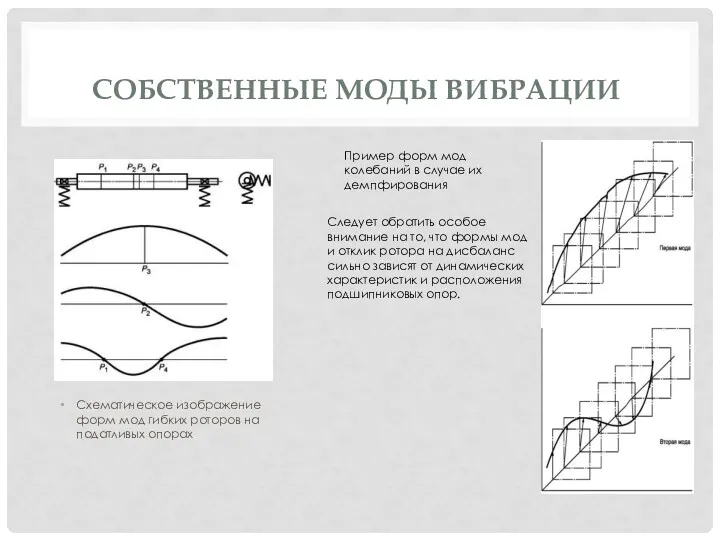
СОБСТВЕННЫЕ МОДЫ ВИБРАЦИИ
Схематическое изображение форм мод гибких роторов на податливых опорах
Пример
СОБСТВЕННЫЕ МОДЫ ВИБРАЦИИ
Схематическое изображение форм мод гибких роторов на податливых опорах
Пример
ВОЗДЕЙСТВИЕ ДИСБАЛАНСА НА ГИБКИЙ РОТОР
Распределение дисбаланса может быть выражено через модальные
ВОЗДЕЙСТВИЕ ДИСБАЛАНСА НА ГИБКИЙ РОТОР
Распределение дисбаланса может быть выражено через модальные
ЦЕЛЬ БАЛАНСИРОВКИ ГИБКОГО РОТОРА
Цель балансировки зависит от требований к эксплуатации машины.
ЦЕЛЬ БАЛАНСИРОВКИ ГИБКОГО РОТОРА
Цель балансировки зависит от требований к эксплуатации машины.
ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ И ЧИСЛА ПЛОСКОСТЕЙ КОРРЕКЦИИ
Число необходимых плоскостей коррекции вдоль оси
ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ И ЧИСЛА ПЛОСКОСТЕЙ КОРРЕКЦИИ
Число необходимых плоскостей коррекции вдоль оси
БАЛАНСИРОВКА ВАЛОПРОВОДОВ
Валопровод, состоящий из нескольких роторов, имеет несколько критических частот вращения
БАЛАНСИРОВКА ВАЛОПРОВОДОВ
Валопровод, состоящий из нескольких роторов, имеет несколько критических частот вращения
МЕТОДЫ БАЛАНСИРОВКИ ГИБКИХ РОТОРОВ НА НИЗКИХ СКОРОСТЯХ ВРАЩЕНИЯ
Выбор плоскостей коррекции
Если места
МЕТОДЫ БАЛАНСИРОВКИ ГИБКИХ РОТОРОВ НА НИЗКИХ СКОРОСТЯХ ВРАЩЕНИЯ
Выбор плоскостей коррекции
Если места
МЕТОДЫ НИЗКОСКОРОСТНОЙ БАЛАНСИРОВКИ
Одноплоскостная балансировка
Если начальный дисбаланс сосредоточен преимущественным образом в одной
МЕТОДЫ НИЗКОСКОРОСТНОЙ БАЛАНСИРОВКИ
Одноплоскостная балансировка
Если начальный дисбаланс сосредоточен преимущественным образом в одной
ПОСЛЕДУЮЩАЯ БАЛАНСИРОВКА ПРИ КОНТРОЛЕ НАЧАЛЬНОГО ДИСБАЛАНСА
Ротор, собранный из уравновешенных элементов, может,
ПОСЛЕДУЮЩАЯ БАЛАНСИРОВКА ПРИ КОНТРОЛЕ НАЧАЛЬНОГО ДИСБАЛАНСА
Ротор, собранный из уравновешенных элементов, может,
БАЛАНСИРОВКА НА ЭТАПАХ СБОРКИ
Предварительно уравновешивают вал. После этого ротор подвергают балансировке
БАЛАНСИРОВКА НА ЭТАПАХ СБОРКИ
Предварительно уравновешивают вал. После этого ротор подвергают балансировке
БАЛАНСИРОВКА В ОПТИМАЛЬНЫХ ПЛОСКОСТЯХ
Если из-за особенностей конструкции или метода изготовления роторы
БАЛАНСИРОВКА В ОПТИМАЛЬНЫХ ПЛОСКОСТЯХ
Если из-за особенностей конструкции или метода изготовления роторы
КРИТЕРИИ ОЦЕНКИ КАЧЕСТВА БАЛАНСИРОВКИ
Критерии оценки качества балансировки выражают либо через предельные
КРИТЕРИИ ОЦЕНКИ КАЧЕСТВА БАЛАНСИРОВКИ
Критерии оценки качества балансировки выражают либо через предельные
Допустимые значения вибрации на балансировочном оборудовании
Возможны два способа определения допустимой вибрации
Допустимые значения вибрации на балансировочном оборудовании
Возможны два способа определения допустимой вибрации
Значения K1 и K2 могут изменяться в широких пределах и зависят
Значения K1 и K2 могут изменяться в широких пределах и зависят
ОЦЕНКА ВИБРАЦИИ
Оценка вибрации на испытательном стенде
Ротор, состояние уравновешенности которого окончательно оценивают
ОЦЕНКА ВИБРАЦИИ
Оценка вибрации на испытательном стенде
Ротор, состояние уравновешенности которого окончательно оценивают
ОЦЕНКА ВИБРАЦИИ
Оценка на низкой скорости вращения
Оценка состояния уравновешенности на низкой скорости
ОЦЕНКА ВИБРАЦИИ
Оценка на низкой скорости вращения
Оценка состояния уравновешенности на низкой скорости
ФАКТОРЫ, ВЛИЯЮЩИЕ НА ОЦЕНКУ УРАВНОВЕШЕННОСТИ РОТОРА ПО РЕЗУЛЬТАТАМ ИЗМЕРЕНИЙ НА МЕСТЕ
ФАКТОРЫ, ВЛИЯЮЩИЕ НА ОЦЕНКУ УРАВНОВЕШЕННОСТИ РОТОРА ПО РЕЗУЛЬТАТАМ ИЗМЕРЕНИЙ НА МЕСТЕ
НИЗКОСКОРОСТНАЯ БАЛАНСИРОВКА РОТОРОВ В ТРЕХ ОПТИМАЛЬНЫХ ПЛОСКОСТЯХ (ПРИЛОЖЕНИЕ)
В данном приложении рассмотрена
НИЗКОСКОРОСТНАЯ БАЛАНСИРОВКА РОТОРОВ В ТРЕХ ОПТИМАЛЬНЫХ ПЛОСКОСТЯХ (ПРИЛОЖЕНИЕ)
В данном приложении рассмотрена
НИЗКОСКОРОСТНАЯ БАЛАНСИРОВКА РОТОРОВ В ТРЕХ ОПТИМАЛЬНЫХ ПЛОСКОСТЯХ
где H определяет долю коррекции
НИЗКОСКОРОСТНАЯ БАЛАНСИРОВКА РОТОРОВ В ТРЕХ ОПТИМАЛЬНЫХ ПЛОСКОСТЯХ
где H определяет долю коррекции
 Способы передачи теплоты. Количественные характеристики переноса теплоты. Теплопроводность. (Занятие 8)
Способы передачи теплоты. Количественные характеристики переноса теплоты. Теплопроводность. (Занятие 8) Helidrive Logistics. Таможенный брокер и международный экспедитор
Helidrive Logistics. Таможенный брокер и международный экспедитор Niedrożność jelit
Niedrożność jelit Жизнь зверей зимой
Жизнь зверей зимой Химиялық реакциялардың түрлері
Химиялық реакциялардың түрлері Твоё здоровье и питание.
Твоё здоровье и питание. Клиринг и прочие платежные операции в различных платежных системах
Клиринг и прочие платежные операции в различных платежных системах Развитие речи, как компенсаторного фактора для детей с нарушением зрения, на занятиях продуктивными видами деятельности.
Развитие речи, как компенсаторного фактора для детей с нарушением зрения, на занятиях продуктивными видами деятельности. Создание индексов для студентов специальности 5В070400 Вычислительная техника и программное обеспечение
Создание индексов для студентов специальности 5В070400 Вычислительная техника и программное обеспечение Голышев В.С._ВКР
Голышев В.С._ВКР Метод координат при решении стереометрических задач
Метод координат при решении стереометрических задач Культура Китая
Культура Китая Ткани растений
Ткани растений презентация на тему Новые подходы в воспитании детей раннего возраста
презентация на тему Новые подходы в воспитании детей раннего возраста Ф. И. Тютчев. 1803 – 1873 гг. Страницы биографии и творчества
Ф. И. Тютчев. 1803 – 1873 гг. Страницы биографии и творчества Зимние виды спорта (подготовительная группа детского сада)
Зимние виды спорта (подготовительная группа детского сада) Вторичные кардиомиопатии. Неспецифические и специфические
Вторичные кардиомиопатии. Неспецифические и специфические Прикладная информатика. Видео-камеры
Прикладная информатика. Видео-камеры Воды недр 6 класс
Воды недр 6 класс Пасха - Светлое Воскресенье Господне
Пасха - Светлое Воскресенье Господне Музей – это история прошлого
Музей – это история прошлого Волшебная страна математики. Сказка. 3 класс
Волшебная страна математики. Сказка. 3 класс Грамматический строй родного языка, значение его усвоения для речевого развития детей
Грамматический строй родного языка, значение его усвоения для речевого развития детей Методы сборки
Методы сборки Образование и культура в XVII веке в России
Образование и культура в XVII веке в России Туристские фирмы и экскурсионные маршруты г. Сочи
Туристские фирмы и экскурсионные маршруты г. Сочи Муниципальное автономное дошкольное образовательное учреждение №586 Остров детства. Группа №3 Дружная семейка
Муниципальное автономное дошкольное образовательное учреждение №586 Остров детства. Группа №3 Дружная семейка Михаил Михайлович Зощенко (1894-1958)
Михаил Михайлович Зощенко (1894-1958)