- Цифровые автоматические системы и математический аппарат их исследования

Содержание
- 2. Литература Бесекерский В.А., Цифровые автоматические системы, М.: Наука, 1976. Микропроцессорные системы автоматического управления // Бесекерский В.А.
- 3. Содержание КР Введение Преобразование структурной схемы ЦСАУ Анализ устойчивости ЦСАУ Анализ переходных процессов ЦСАУ Анализ ЛАЧХ
- 4. ОУ - объект управления ИМ - исполнительный механизм Д - датчик передаточные функции:
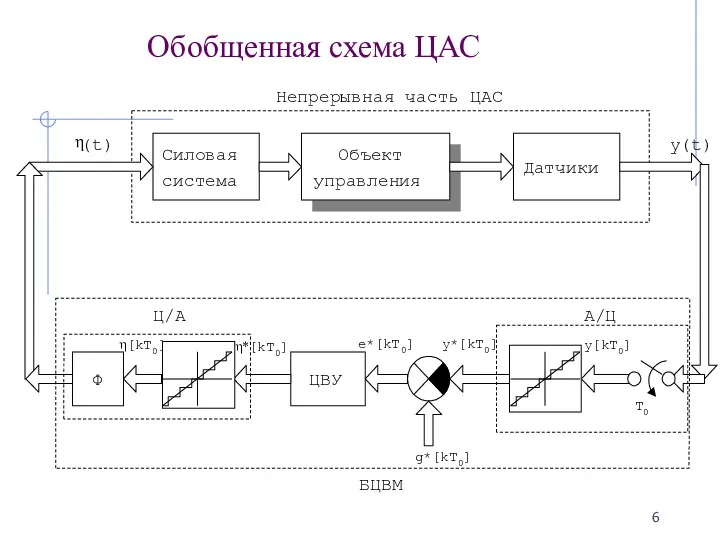
- 6. Обобщенная схема ЦАС
- 7. Цифровое вычислительное устройство Если периоды Т0i повторения решений в БЦВМ алгоритмов, соответствующих i-му каналу управления можно
- 8. Особенности цифровых систем Достоинства реализация сложных нелинейные алгоритмов управления, оптимизирующих работу системы по различным критериям качества;
- 9. Методы исследования цифровых систем 1) методы, основанные на приближенном сведении цифровой системы к чисто непрерывной системе,
- 10. ПРЕОБРАЗОВАНИЕ НЕПРЕРЫВНЫХ СИГНАЛОВ В ЦИФРОВОЙ КОД. КВАНТОВАНИЕ ПО ВРЕМЕНИ И УРОВНЮ Этапы преобразования непрерывного сигнала y(t)
- 11. Квантование по времени – фиксация мгновенных значений непрерывно изменяющейся функции y(t) в дискретные моменты времени kT0
- 12. Виды модуляции амплитудно-импульсная модуляция — варьируется высота А; широтно-импульсная модуляция — варьируется параметр γ; частотно-импульсная модуляция
- 13. Квантование по уровню – замена в соответствующие моменты времени мгновенных значений непрерывной величины у ближайшими разрешенными
- 14. При одновременном квантовании по времени и уровню непрерывный сигнал y(t) заменяется ближайшими к значениям непрерывного сигнала
- 15. Преобразование цифрового кода в непрерывный сигнал Декодирование состоит в преобразовании числового кода в импульсный сигнал с
- 16. Решетчатая функция – это функция, значения которой определены лишь в некоторые, тактовые моменты времени f [kT]
- 17. Исследование динамики дискретных систем с использованием переменных состояния Исследование проводят во временной области Рассматривают систему разностных
- 18. Преобразование Лапласа каждой преобразуемой по Лапласу функции f(t) (оригиналу), поставить в соответствие функцию F(р) комплексной переменной
- 19. Дискретное преобразование Лапласа p = c+jω; f [kT]- решетчатая функция (оригинал ); F*(p)-изображение. Для смещенной решетчатой
- 20. Взаимосвязь F*(p) и F(p) Si – полюсы изображения Для смещенного оригинала Z-преобразование z=epT Для смещенной решетчатой
- 21. Z- преобразование результат применения к оригиналу f[kT] или изображению F(p), D или преобразования с последующей заменой
- 23. Скачать презентацию
Литература
Бесекерский В.А., Цифровые автоматические системы, М.: Наука, 1976.
Микропроцессорные системы автоматического управления
Литература
Бесекерский В.А., Цифровые автоматические системы, М.: Наука, 1976.
Микропроцессорные системы автоматического управления
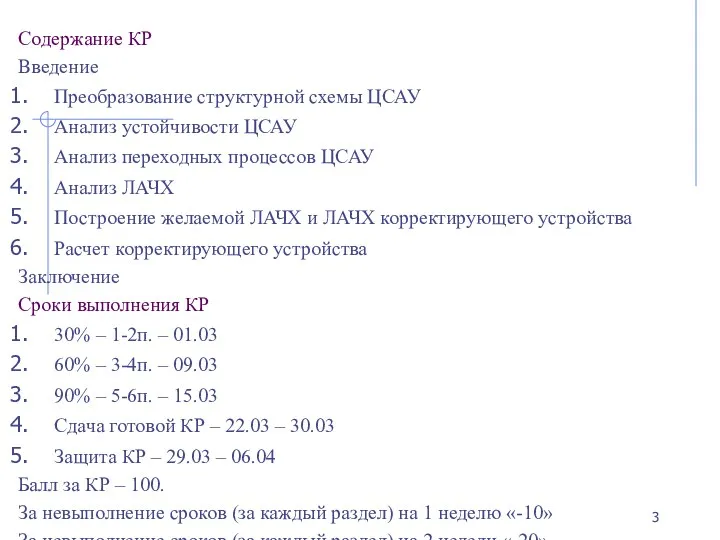
Содержание КР
Введение
Преобразование структурной схемы ЦСАУ
Анализ устойчивости ЦСАУ
Анализ переходных процессов ЦСАУ
Анализ ЛАЧХ
Построение
Содержание КР
Введение
Преобразование структурной схемы ЦСАУ
Анализ устойчивости ЦСАУ
Анализ переходных процессов ЦСАУ
Анализ ЛАЧХ
Построение
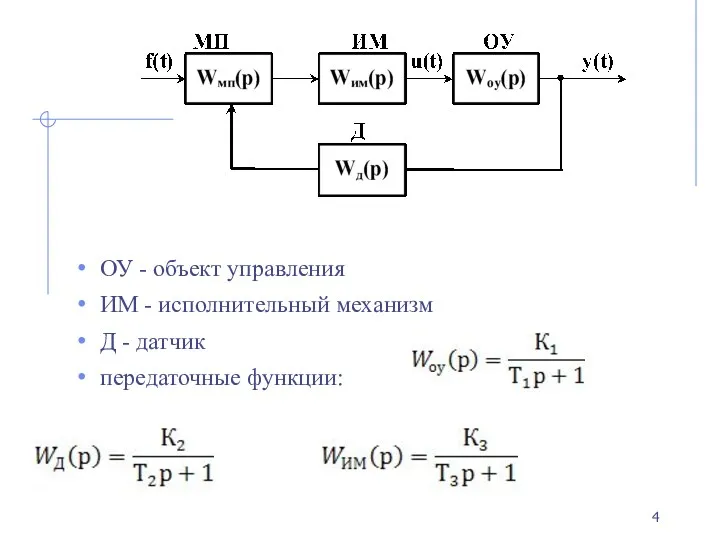
ОУ - объект управления
ИМ - исполнительный механизм
Д - датчик
передаточные функции:
ОУ - объект управления
ИМ - исполнительный механизм
Д - датчик
передаточные функции:
Обобщенная схема ЦАС
Обобщенная схема ЦАС

Цифровое вычислительное устройство
Если периоды Т0i повторения решений в БЦВМ алгоритмов, соответствующих
Цифровое вычислительное устройство
Если периоды Т0i повторения решений в БЦВМ алгоритмов, соответствующих
Особенности цифровых систем
Достоинства
реализация сложных нелинейные алгоритмов управления, оптимизирующих работу системы по
Особенности цифровых систем
Достоинства
реализация сложных нелинейные алгоритмов управления, оптимизирующих работу системы по
Методы исследования цифровых систем
1) методы, основанные на приближенном сведении цифровой системы
Методы исследования цифровых систем
1) методы, основанные на приближенном сведении цифровой системы
ПРЕОБРАЗОВАНИЕ НЕПРЕРЫВНЫХ СИГНАЛОВ В ЦИФРОВОЙ КОД.
КВАНТОВАНИЕ ПО ВРЕМЕНИ И УРОВНЮ
Этапы
ПРЕОБРАЗОВАНИЕ НЕПРЕРЫВНЫХ СИГНАЛОВ В ЦИФРОВОЙ КОД.
КВАНТОВАНИЕ ПО ВРЕМЕНИ И УРОВНЮ
Этапы
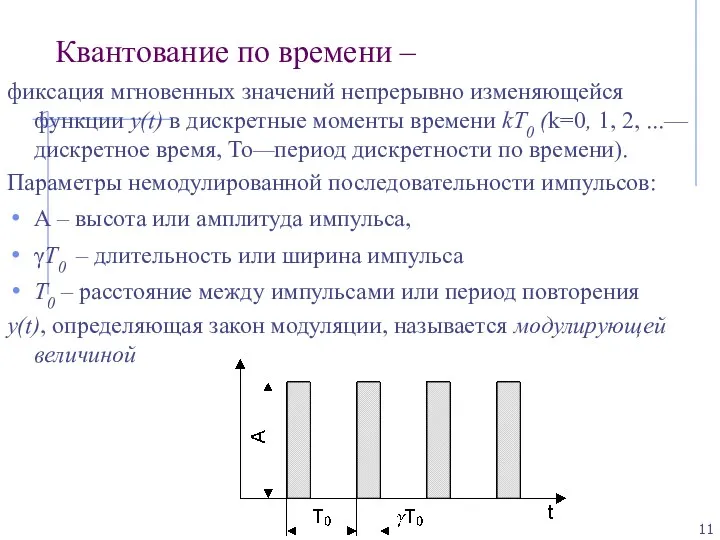
Квантование по времени –
фиксация мгновенных значений непрерывно изменяющейся функции y(t)
Квантование по времени –
фиксация мгновенных значений непрерывно изменяющейся функции y(t)
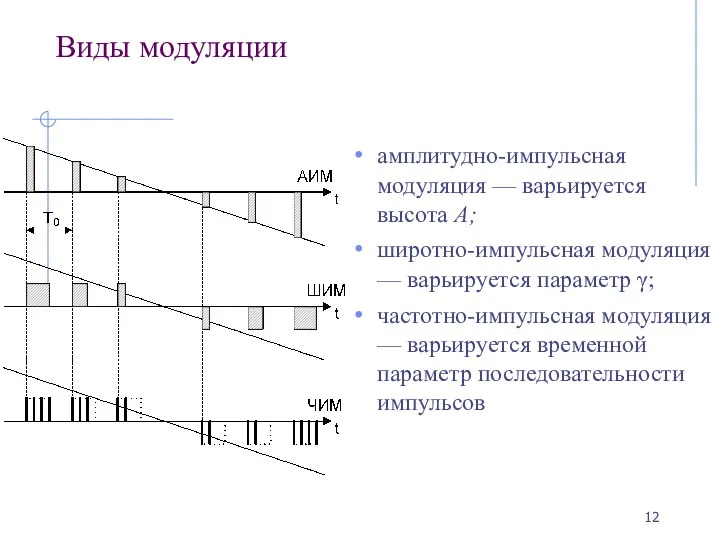
Виды модуляции
амплитудно-импульсная модуляция — варьируется высота А;
широтно-импульсная модуляция — варьируется параметр
Виды модуляции
амплитудно-импульсная модуляция — варьируется высота А;
широтно-импульсная модуляция — варьируется параметр
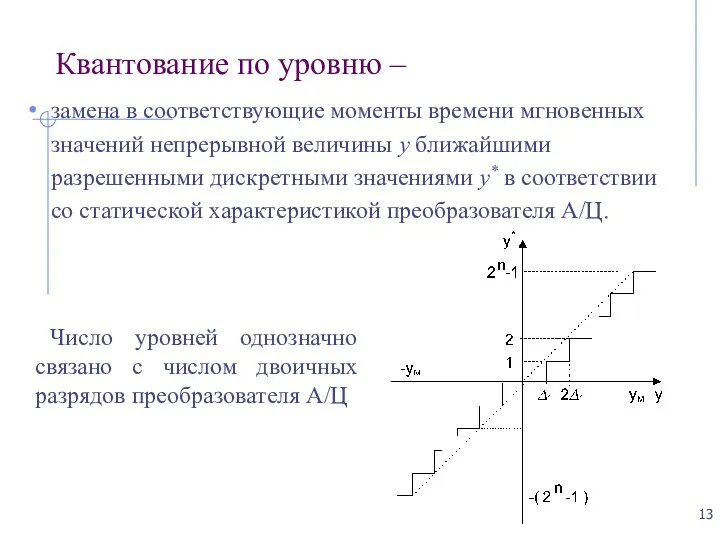
Квантование по уровню –
замена в соответствующие моменты времени мгновенных значений
Квантование по уровню –
замена в соответствующие моменты времени мгновенных значений
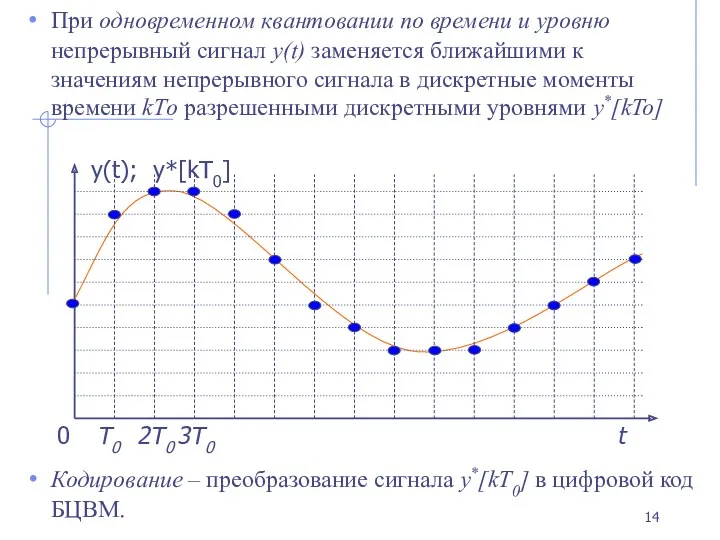
При одновременном квантовании по времени и уровню непрерывный сигнал y(t) заменяется
При одновременном квантовании по времени и уровню непрерывный сигнал y(t) заменяется
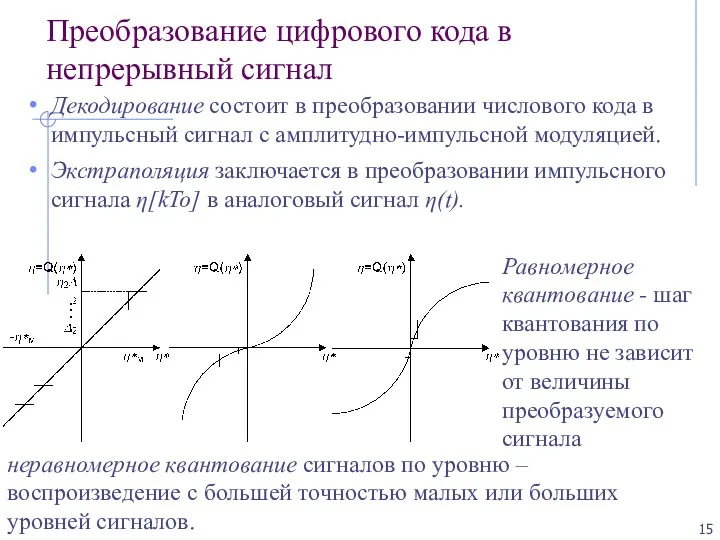
Преобразование цифрового кода в непрерывный сигнал
Декодирование состоит в преобразовании числового
Преобразование цифрового кода в непрерывный сигнал
Декодирование состоит в преобразовании числового
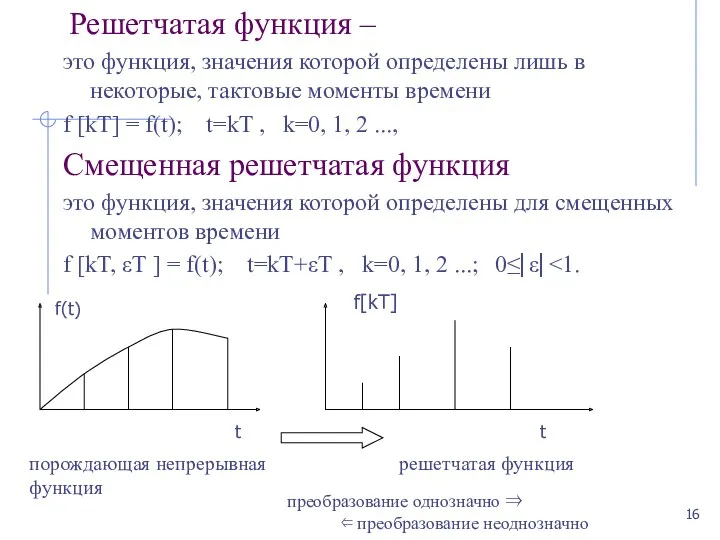
Решетчатая функция –
это функция, значения которой определены лишь в
Решетчатая функция –
это функция, значения которой определены лишь в
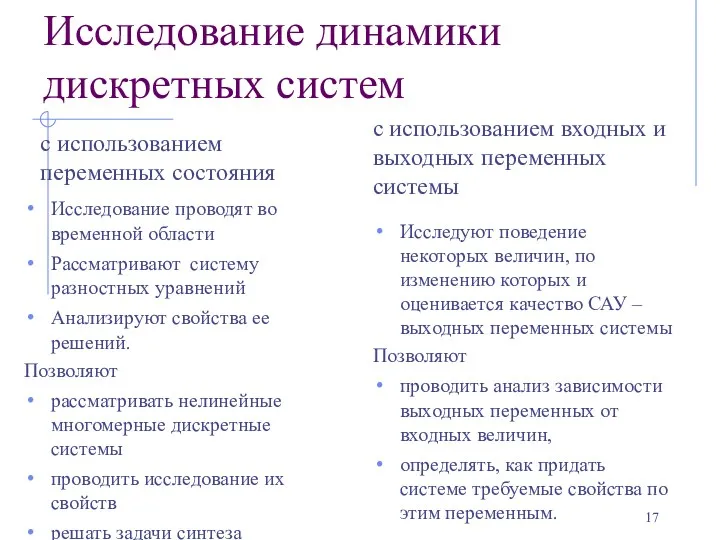
Исследование динамики дискретных систем
с использованием переменных состояния
Исследование проводят во временной области
Рассматривают
Исследование динамики дискретных систем
с использованием переменных состояния
Исследование проводят во временной области
Рассматривают
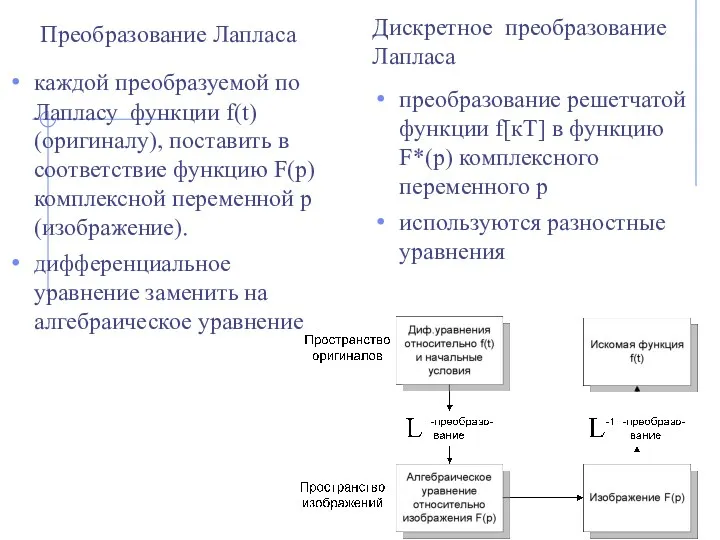
Преобразование Лапласа
каждой преобразуемой по Лапласу функции f(t) (оригиналу), поставить в соответствие
Преобразование Лапласа
каждой преобразуемой по Лапласу функции f(t) (оригиналу), поставить в соответствие
![Дискретное преобразование Лапласа p = c+jω; f [kT]- решетчатая функция](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/389326/slide-18.jpg)
Дискретное преобразование Лапласа
p = c+jω;
f [kT]- решетчатая функция (оригинал
Дискретное преобразование Лапласа
p = c+jω;
f [kT]- решетчатая функция (оригинал
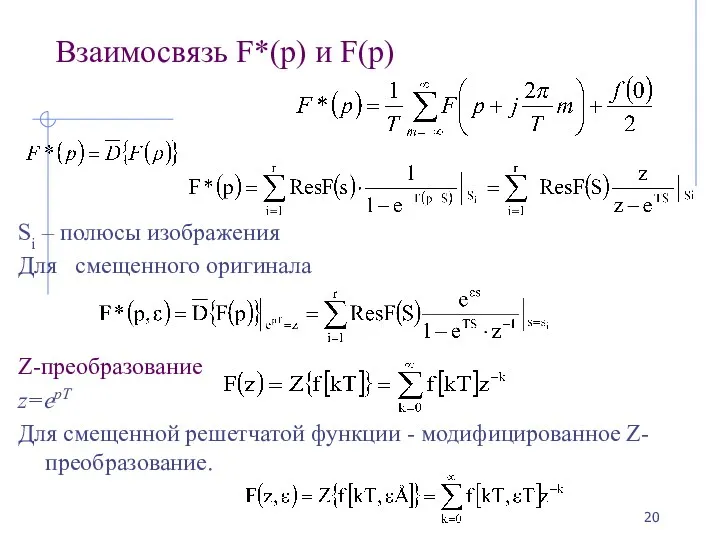
Взаимосвязь F*(p) и F(p)
Si – полюсы изображения
Для смещенного оригинала
Z-преобразование
z=epT
Для
Взаимосвязь F*(p) и F(p)
Si – полюсы изображения
Для смещенного оригинала
Z-преобразование
z=epT
Для
![Z- преобразование результат применения к оригиналу f[kT] или изображению F(p),](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/389326/slide-20.jpg)
Z- преобразование
результат применения к оригиналу f[kT] или изображению F(p), D
Z- преобразование
результат применения к оригиналу f[kT] или изображению F(p), D
 Презентации для уроков Истории и культуры Санкт-Петербурга
Презентации для уроков Истории и культуры Санкт-Петербурга Исламский мир
Исламский мир Щелочные и щелочноземельные металлы
Щелочные и щелочноземельные металлы Физиология и биохимия растительной клетки. Вторичные метаболиты (вещества вторичного происхождения)
Физиология и биохимия растительной клетки. Вторичные метаболиты (вещества вторичного происхождения) Проектирование объектов строительства, строительные материалы и технология строительного производства. (Тема 3)
Проектирование объектов строительства, строительные материалы и технология строительного производства. (Тема 3) Магнітний запис інформації
Магнітний запис інформації Формы оздоровительно - развивающей работы с дошкольниками в условиях ФГТ
Формы оздоровительно - развивающей работы с дошкольниками в условиях ФГТ Многоканальный опыт
Многоканальный опыт Материалы по теме месяца
Материалы по теме месяца Публицистический стиль. Задания ЕГЭ
Публицистический стиль. Задания ЕГЭ Временные характеристики линейных стационарных автоматических систем
Временные характеристики линейных стационарных автоматических систем Презентация по теме: О вреде курения
Презентация по теме: О вреде курения Программа здоровьесбережения для школьников (презентация)
Программа здоровьесбережения для школьников (презентация) Федор Михайлович Достоевский
Федор Михайлович Достоевский Портфолио студентки Конькиной Полины Сергеевны. Колледж Петербургской моды
Портфолио студентки Конькиной Полины Сергеевны. Колледж Петербургской моды Шаблон презентации
Шаблон презентации Капитальный ремонт объекта Парк по пр. Ленинградскому от ул. Галушина до ул. Красной звезды
Капитальный ремонт объекта Парк по пр. Ленинградскому от ул. Галушина до ул. Красной звезды Система керування насосів цеху водопостачання з нечутливістю до змін гідравлічного опору мережі водоспоживання
Система керування насосів цеху водопостачання з нечутливістю до змін гідравлічного опору мережі водоспоживання Свобода в деятельности человека. (11 класс)
Свобода в деятельности человека. (11 класс) Консультация. Видоизменения корней
Консультация. Видоизменения корней Розробка режимів експлуатації ГНПС і прилеглої ділянки магістрального нафтопроводу
Розробка режимів експлуатації ГНПС і прилеглої ділянки магістрального нафтопроводу Сравнение окон ALT F50 и СИАЛ
Сравнение окон ALT F50 и СИАЛ Театральная студия
Театральная студия Религиозные символы народов России
Религиозные символы народов России Проповідь. Характеристики пояснювальної проповіді
Проповідь. Характеристики пояснювальної проповіді Долговые ценные бумаги. (Тема 4)
Долговые ценные бумаги. (Тема 4) Прямоугольник
Прямоугольник 20231017_igra_ege
20231017_igra_ege