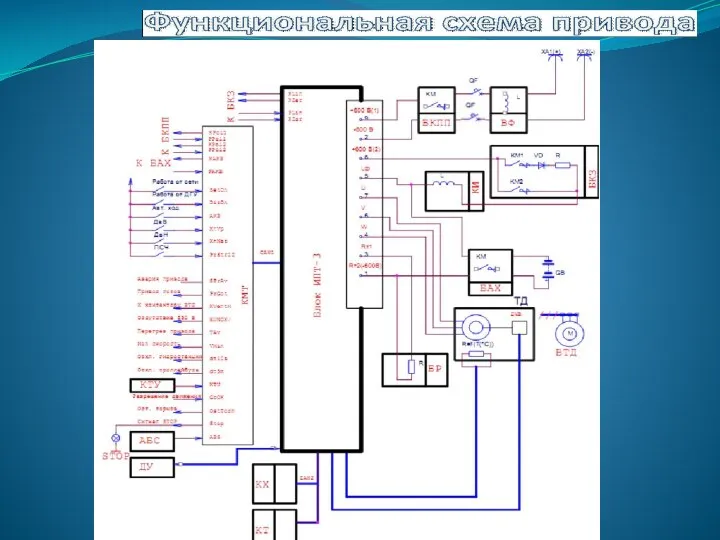
- Тяговый привод и CAN 1

Содержание
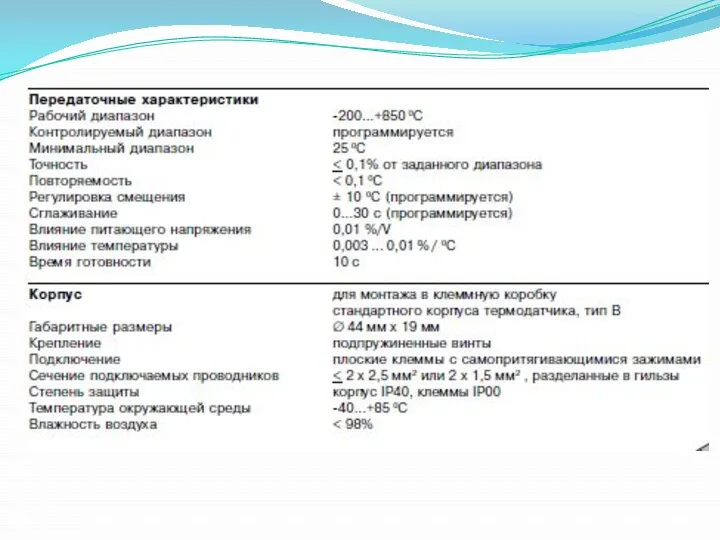
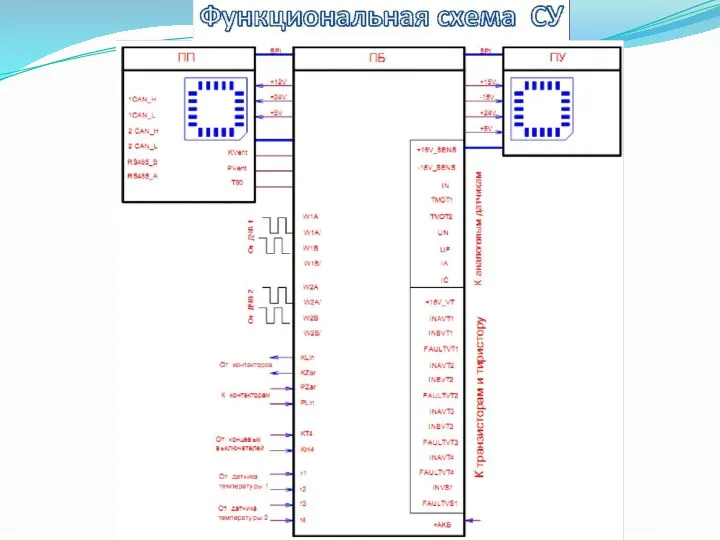
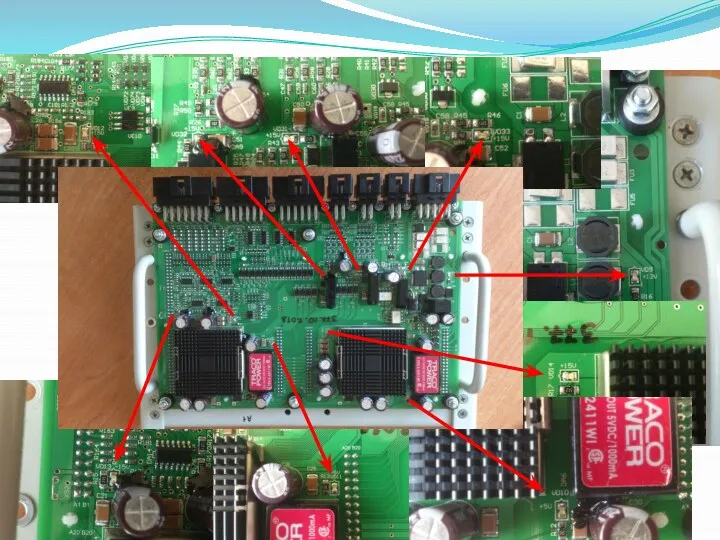
- 4. Плата базовая
- 8. Адаптеры драйвера силовых ключей инвертора Управление всеми силовыми транзисторными ключами обеспечивается отдельными адаптерами драйверов ДРР1…ДРР4, предназначенными
- 15. Субблок управления Адаптер драйвера 4 шт
- 42. Подключение к сети CAN УСДД предназначено для обработки данных, поступающих от КВС, а также для получения
- 43. МТК -12 выполняет функции УСДД , так же может обеспечивать дополнительный функционал, например управление системой оплаты
- 45. WEB интерфейс
- 46. Что такое CAN? Сеть CAN (Controller Area Network - "область, охваченная сетью контроллеров") представляет собой комплекс
- 47. При управление всеми системами троллейбуса возникает необходимость контролировать и управлять большим количеством сигналов и воздействий в
- 48. Топология сети CAN В любой реализации CAN - носитель (физическая среда передачи данных) интерпретируется как эфир,
- 49. CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии - CAN_H (can-high) и CAN_L
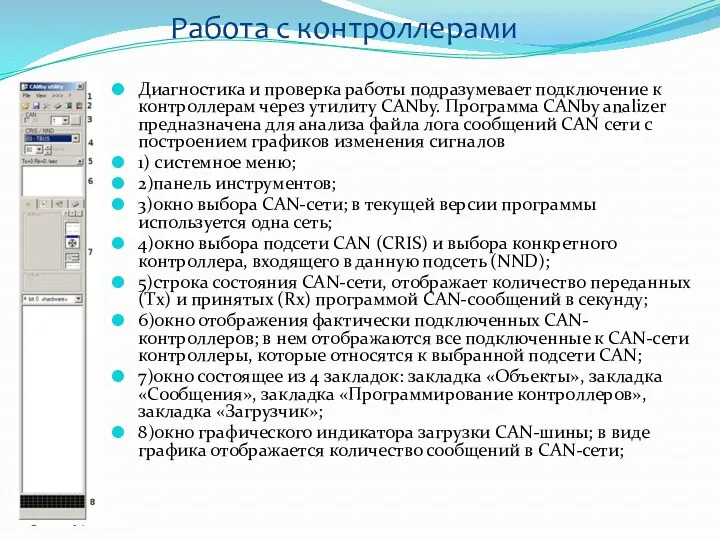
- 51. Работа с контроллерами Диагностика и проверка работы подразумевает подключение к контроллерам через утилиту CANby. Программа CANby
- 52. Работа с индивидуальным окном контроллера
- 53. Объекты
- 55. Скачать презентацию
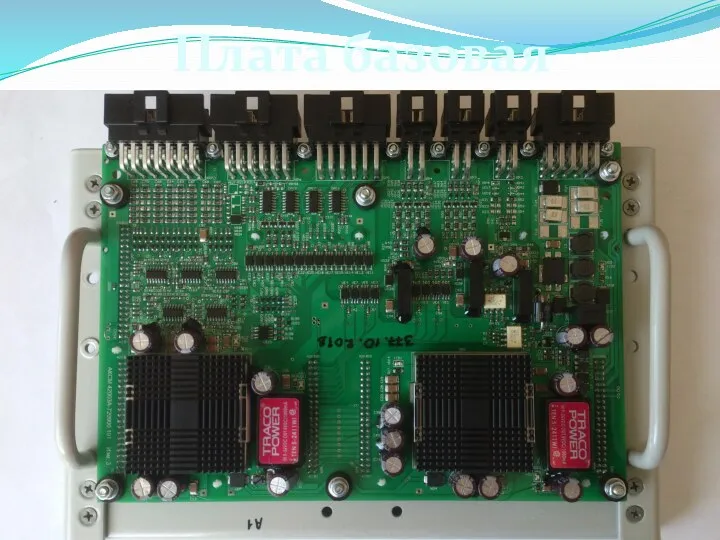
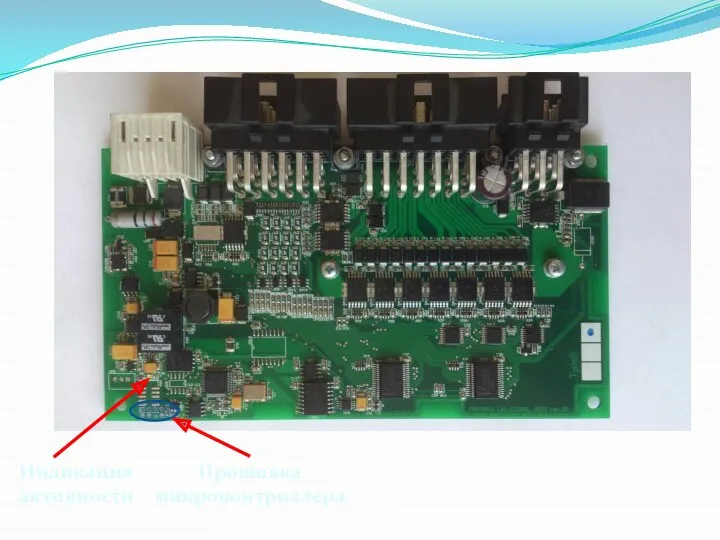
Плата базовая
Плата базовая


Адаптеры драйвера силовых ключей инвертора
Управление всеми силовыми транзисторными ключами обеспечивается отдельными
Адаптеры драйвера силовых ключей инвертора
Управление всеми силовыми транзисторными ключами обеспечивается отдельными
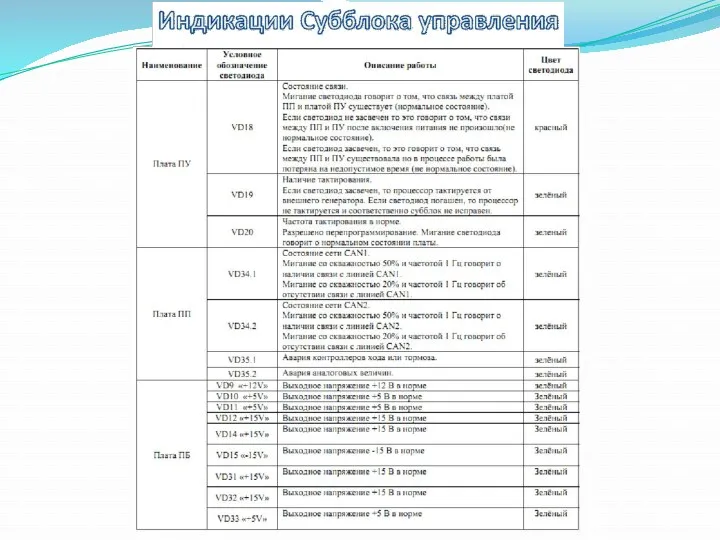

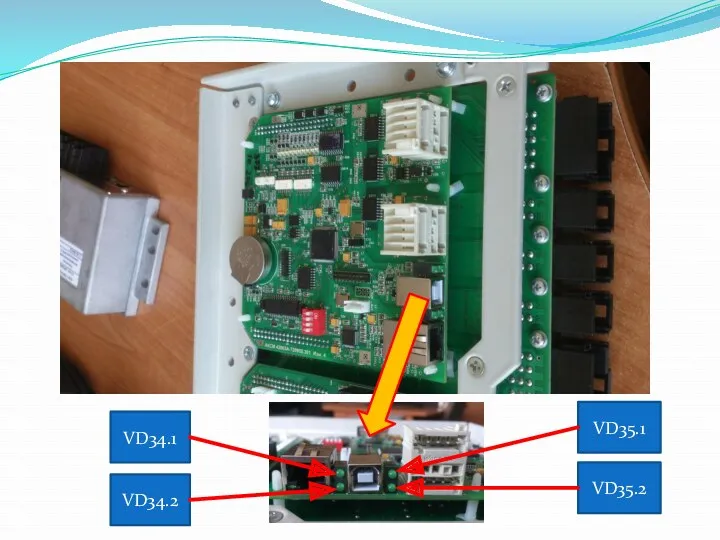

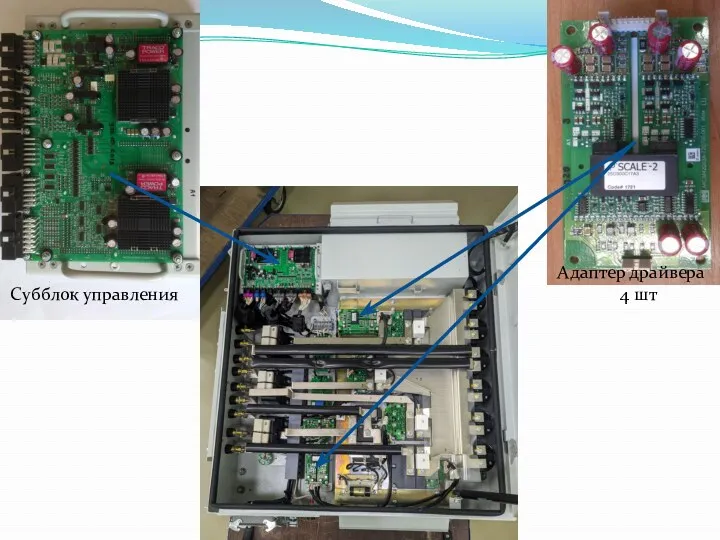
Субблок управления
Адаптер драйвера
4 шт
Субблок управления
Адаптер драйвера
4 шт










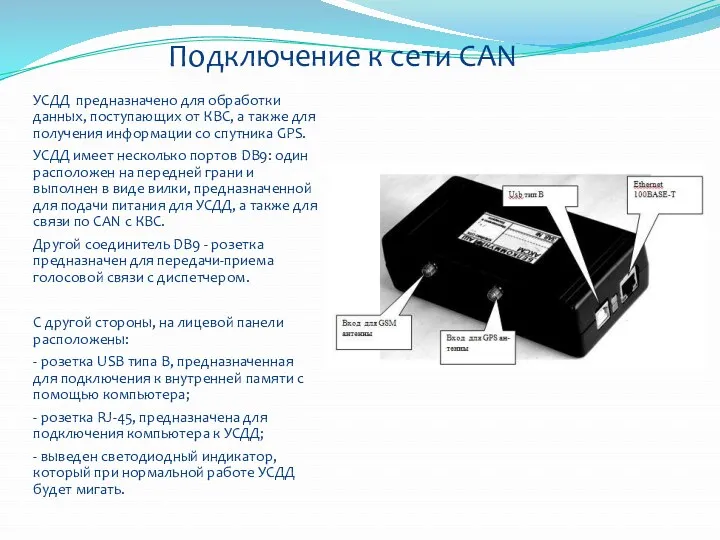
Подключение к сети CAN
УСДД предназначено для обработки данных, поступающих от КВС,
Подключение к сети CAN
УСДД предназначено для обработки данных, поступающих от КВС,
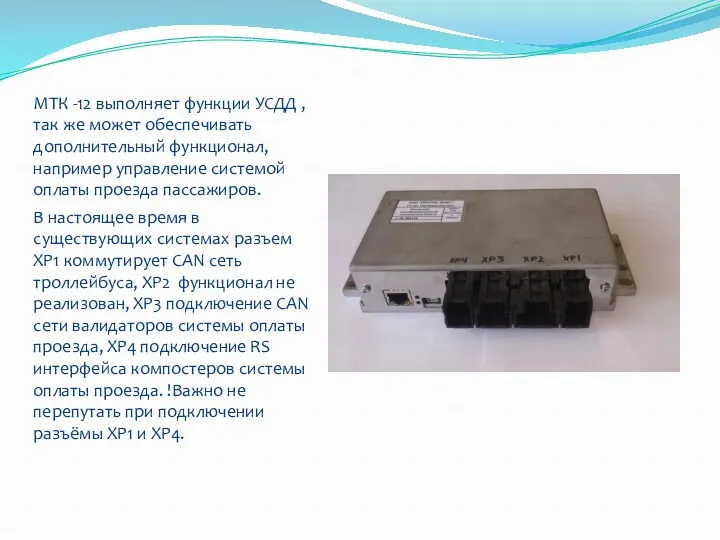
МТК -12 выполняет функции УСДД , так же может обеспечивать дополнительный
МТК -12 выполняет функции УСДД , так же может обеспечивать дополнительный

WEB интерфейс
WEB интерфейс
Что такое CAN?
Сеть CAN (Controller Area Network - "область, охваченная сетью
Что такое CAN?
Сеть CAN (Controller Area Network - "область, охваченная сетью
При управление всеми системами троллейбуса возникает необходимость контролировать и управлять большим
При управление всеми системами троллейбуса возникает необходимость контролировать и управлять большим
Топология сети CAN
В любой реализации CAN - носитель (физическая среда передачи
Топология сети CAN
В любой реализации CAN - носитель (физическая среда передачи
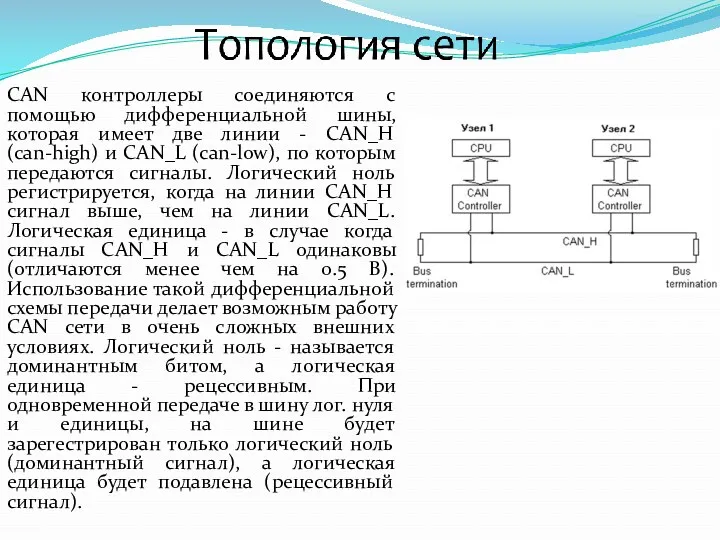
CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии
CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии

Работа с контроллерами
Диагностика и проверка работы подразумевает подключение к контроллерам через
Работа с контроллерами
Диагностика и проверка работы подразумевает подключение к контроллерам через
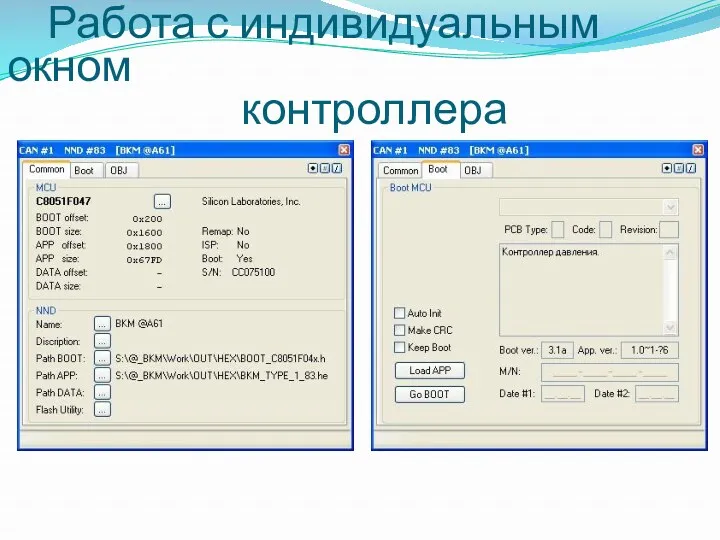
Работа с индивидуальным окном
контроллера
Работа с индивидуальным окном
контроллера
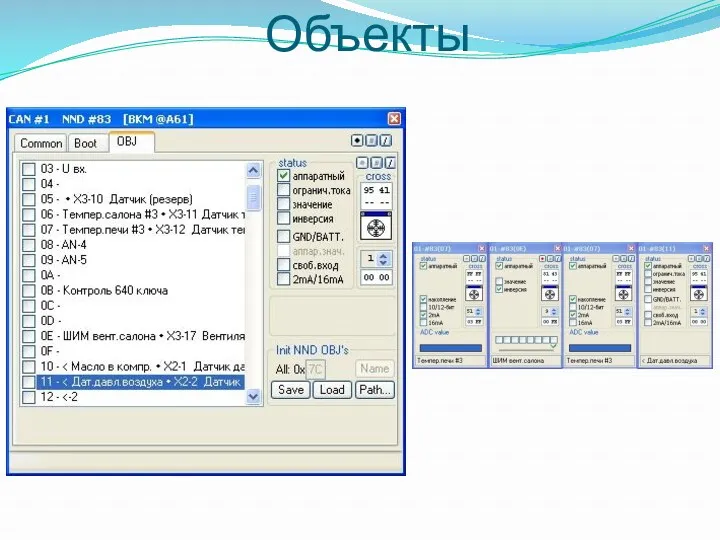
Объекты
Объекты
 Классификация измерительных приборов. Технические, метрологические характеристики СИ
Классификация измерительных приборов. Технические, метрологические характеристики СИ Principiile tratamentului în Diabetul Zaharat
Principiile tratamentului în Diabetul Zaharat Набережные Челны
Набережные Челны Архитектурно-градостроительная концепция развития земельных участков принадлежащих ООО Уваровский-1, ЗАО Агропроминвест
Архитектурно-градостроительная концепция развития земельных участков принадлежащих ООО Уваровский-1, ЗАО Агропроминвест Районная школа молодого педагога Созвездие
Районная школа молодого педагога Созвездие Использование монотонности при решении уравнений
Использование монотонности при решении уравнений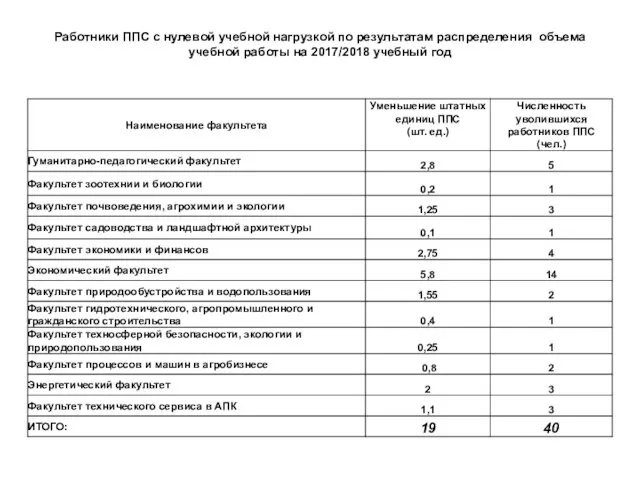 Работники ППС с нулевой учебной нагрузкой по результатам распределения объема учебной работы на 2017/2018 учебный год
Работники ППС с нулевой учебной нагрузкой по результатам распределения объема учебной работы на 2017/2018 учебный год Штурм острова Корфу русско-турецкой эскадрой под командованием адмирала Фёдора Фёдоровича Ушакова
Штурм острова Корфу русско-турецкой эскадрой под командованием адмирала Фёдора Фёдоровича Ушакова Технологический расчет магистрального нефтепровода. Потери в магистральном нефтепроводе
Технологический расчет магистрального нефтепровода. Потери в магистральном нефтепроводе Композиялық материалдар
Композиялық материалдар Отчет Регионального менеджера по Республике Беларусь ООО ЭТЛ-Электро
Отчет Регионального менеджера по Республике Беларусь ООО ЭТЛ-Электро Анализ эффективности методов повышения нефтеотдачи на обьекте Ачимовского месторождения
Анализ эффективности методов повышения нефтеотдачи на обьекте Ачимовского месторождения Острая зоонозная природно-очаговая инфекция лептоспироз
Острая зоонозная природно-очаговая инфекция лептоспироз Молодежь против коррупции
Молодежь против коррупции Arduino. Что это такое?
Arduino. Что это такое? Либерализм. Суть либерализма
Либерализм. Суть либерализма Достопримечательности США
Достопримечательности США Негативные и продуктивные психопатологические синдромы. Синдромы нарушенного сознания. Соматические заболевания
Негативные и продуктивные психопатологические синдромы. Синдромы нарушенного сознания. Соматические заболевания План интерьерного озеленения жилого дома
План интерьерного озеленения жилого дома классный час из серии История Таганрога - знакомство с улицами Таганрога
классный час из серии История Таганрога - знакомство с улицами Таганрога Виробництво тканин, одягу, взуття, у світі та в Україні
Виробництво тканин, одягу, взуття, у світі та в Україні Процесс замены участка трубопровода при проведении ремонтных работ
Процесс замены участка трубопровода при проведении ремонтных работ Белки
Белки Кабинет начальных классов
Кабинет начальных классов родительское собрание (презентация)
родительское собрание (презентация) Развитие ключевых клиентов
Развитие ключевых клиентов Фёдор Иванович Тютчев. Любовная лирика
Фёдор Иванович Тютчев. Любовная лирика Сказка о медведихе. Александр Сергеевич Пушкин
Сказка о медведихе. Александр Сергеевич Пушкин