- Управление промышленными мехатронными системами

Содержание
- 2. 3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС Лекция 3, слайд 1 Рис. 3.1. Обобщенная схема машины с
- 3. Лекция 3, слайд 2 3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС Устройство компьютерного управления выполняет следующие основные
- 4. Лекция 3, слайд 3 Рис. 3.2 . Информационные и энергетические потоки в мехатронной системе 3. СТРУКТУРА
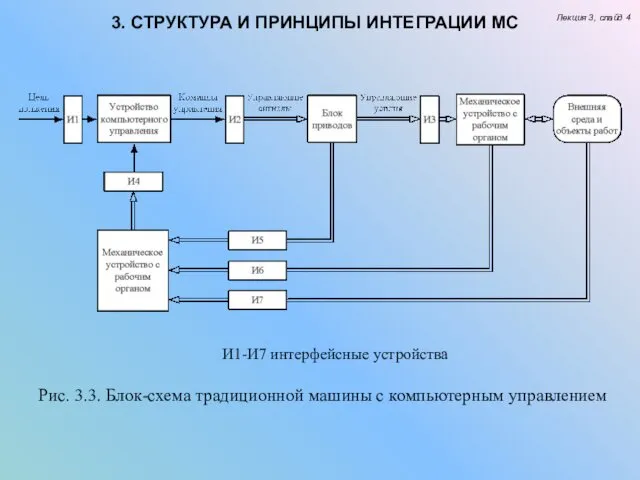
- 5. Лекция 3, слайд 4 Рис. 3.3. Блок-схема традиционной машины с компьютерным управлением 3. СТРУКТУРА И ПРИНЦИПЫ
- 6. Лекция 3, слайд 5 3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС Примеры межблоковых интерфейсов, которые наиболее часто
- 7. Лекция 3, слайд 6 3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС Интерфейс И3 - представляет собой, как
- 9. Скачать презентацию

3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Лекция 3, слайд 1
Рис. 3.1.
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Лекция 3, слайд 1
Рис. 3.1.
Лекция 3, слайд 2
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Устройство компьютерного
Лекция 3, слайд 2
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Устройство компьютерного

Лекция 3, слайд 3
Рис. 3.2 . Информационные и энергетические потоки
Лекция 3, слайд 3
Рис. 3.2 . Информационные и энергетические потоки
Лекция 3, слайд 4
Рис. 3.3. Блок-схема традиционной машины с компьютерным
Лекция 3, слайд 4
Рис. 3.3. Блок-схема традиционной машины с компьютерным
Лекция 3, слайд 5
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Примеры межблоковых
Лекция 3, слайд 5
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Примеры межблоковых
Лекция 3, слайд 6
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Интерфейс И3
Лекция 3, слайд 6
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Интерфейс И3
 Характеристика топливно-энергетической базы Крыма
Характеристика топливно-энергетической базы Крыма Вред курения
Вред курения Презентация. Летний оздоровительный лагерь.
Презентация. Летний оздоровительный лагерь. Анализ динамики экономических показателей России и США
Анализ динамики экономических показателей России и США Биосфера. Среды жизни
Биосфера. Среды жизни Аллергия. Аллергены
Аллергия. Аллергены Презентация Заповеди Блаженствпо предмету ОПК
Презентация Заповеди Блаженствпо предмету ОПК Облік, контроль і аналіз непрямих виробничих витрат
Облік, контроль і аналіз непрямих виробничих витрат Конспект внеклассного занятия на тему: Законы жизни класса.
Конспект внеклассного занятия на тему: Законы жизни класса. Внутренние воды РТ
Внутренние воды РТ Формирование культурной среды небольшого города/села
Формирование культурной среды небольшого города/села аналогічні-гомологічні органи
аналогічні-гомологічні органи Организаторская и воспитательная работа командира подразделения по укреплению воинской дисциплины. Тема № 5
Организаторская и воспитательная работа командира подразделения по укреплению воинской дисциплины. Тема № 5 О мерах по поддержки генерирующих объектов на основе ВИЭ. Законодательная база поддержки генерации ВИЭ
О мерах по поддержки генерирующих объектов на основе ВИЭ. Законодательная база поддержки генерации ВИЭ Интернет в жизни старшеклассника: за или против
Интернет в жизни старшеклассника: за или против Тольятти. История любимого города
Тольятти. История любимого города Пейзаж — поэтичная и музыкальная живопись
Пейзаж — поэтичная и музыкальная живопись Особенности рельефа территории России
Особенности рельефа территории России Направления реализации Национальной стратегии по обращению с ТКО и ВМР
Направления реализации Национальной стратегии по обращению с ТКО и ВМР ФЭМП 14.04.2020
ФЭМП 14.04.2020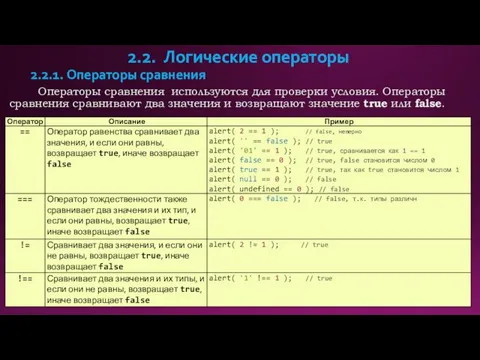 Логические операторы
Логические операторы Обрезка яблони и груши
Обрезка яблони и груши Проектирование современного урока биологии, географии в соответствии с требованиями ФГОС
Проектирование современного урока биологии, географии в соответствии с требованиями ФГОС Правовое регулирование предпринимательской деятельности
Правовое регулирование предпринимательской деятельности Презентация для детей
Презентация для детей Миотоническая дистрофия Россолимо-Штейнерта-Куршманна-Баттена
Миотоническая дистрофия Россолимо-Штейнерта-Куршманна-Баттена Плотность
Плотность Праздники и календари. Основы мировых религиозных наук (4 класс)
Праздники и календари. Основы мировых религиозных наук (4 класс)