- Устройство управления вычислительной машины

Содержание
- 2. Определения Устройство управления (УУ) вычислительной машины реализует функции управления ходом вычислительного процесса, обеспечивая автоматическое выполнение команд
- 3. Функциональная схема гипотетической фон-неймановской ВМ
- 4. Гипотетическая вычислительная машина фон-неймановского типа Гипотетическая ВМ имеет следующие особенности: Одноадресные команды. Адресная часть команды (АЧ)
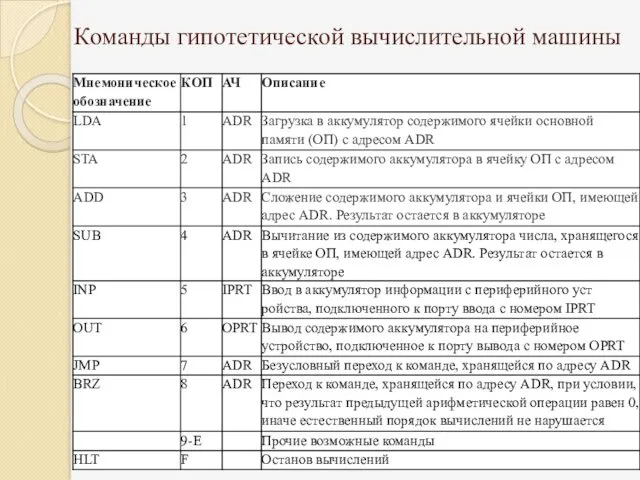
- 5. Команды гипотетической вычислительной машины
- 6. Функции устройства управления Основные целевые функции устройства управления в ходе выполнения команды: выборка и декодирование команды,
- 7. Функциональная схема гипотетической фон-неймановской ВМ
- 8. Функции устройства управления (2) Каждая функция (УУ) реализуется последовательностью элементарных действий в узлах. Такие элементарные действия,
- 9. Микропрограммный автомат
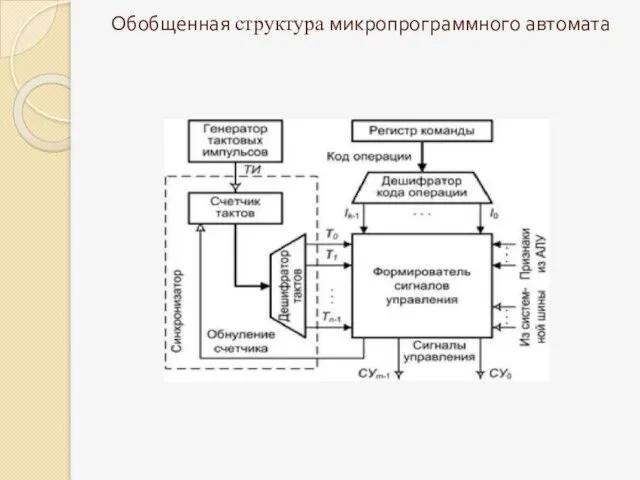
- 10. Обобщенная структура микропрограммного автомата Сигналы управления (СУ) вырабатываются формирователем сигналов управления (ФСУ). Каждый СУ «привязан» к
- 11. Микропрограммный автомат Наибольшее распространение получили два варианта микропрограммных автоматов: с аппаратной или «жесткой» логикой; с программируемой
- 12. Микропрограммный автомат с аппаратной логикой Каждый используемый в ВМ сигнал управления описывается логическим выражением. На основе
- 13. Команды гипотетической вычислительной машины
- 14. Функциональная схема гипотетической фон-неймановской ВМ
- 15. Обобщенная структура микропрограммного автомата
- 16. Описание сигналов управления и моментов их формирования
- 17. На основе таблицы можно составить следующую систему логических выражений: РАП_СК = ВК^Т0 ЧтЗУ = ВК^Т0 v
- 18. Аппаратная реализация формирователя сигналов управления для гипотетической ВМ
- 19. Микропрограммный автомат с аппаратной логикой Основное достоинством МПА с аппаратной логикой: комбинационная схема формирователя сигналов управления
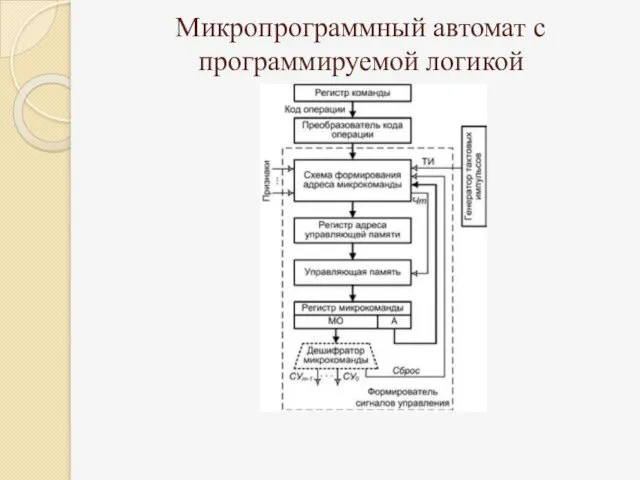
- 20. Микропрограммный автомат с программируемой логикой Сигналы управления в МПА с программируемой логикой представляются с помощью управляющих
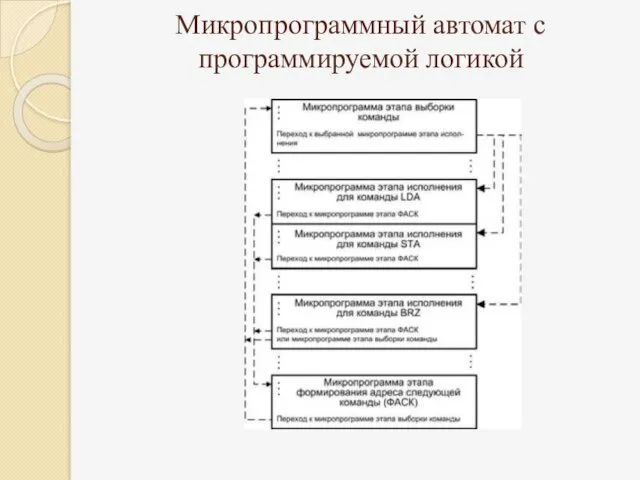
- 21. Микропрограммный автомат с программируемой логикой
- 22. Микропрограммный автомат с программируемой логикой Микропрограммный автомат с программируемой логикой не является оптимальным с точки зрения
- 23. Микропрограммный автомат с программируемой логикой
- 24. Функциональная схема гипотетической фон-неймановской ВМ
- 26. Скачать презентацию
Определения
Устройство управления (УУ) вычислительной машины реализует функции управления ходом вычислительного процесса,
Определения
Устройство управления (УУ) вычислительной машины реализует функции управления ходом вычислительного процесса,

Функциональная схема гипотетической фон-неймановской ВМ
Функциональная схема гипотетической фон-неймановской ВМ
Гипотетическая вычислительная машина фон-неймановского типа
Гипотетическая ВМ имеет следующие особенности:
Одноадресные команды.
Гипотетическая вычислительная машина фон-неймановского типа
Гипотетическая ВМ имеет следующие особенности:
Одноадресные команды.
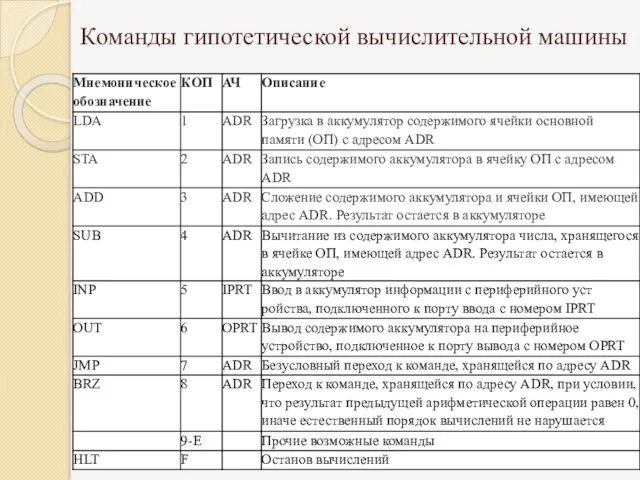
Команды гипотетической вычислительной машины
Команды гипотетической вычислительной машины
Функции устройства управления
Основные целевые функции устройства управления в ходе выполнения команды:
выборка
Функции устройства управления
Основные целевые функции устройства управления в ходе выполнения команды:
выборка

Функциональная схема гипотетической фон-неймановской ВМ
Функциональная схема гипотетической фон-неймановской ВМ
Функции устройства управления (2)
Каждая функция (УУ) реализуется последовательностью элементарных действий в
Функции устройства управления (2)
Каждая функция (УУ) реализуется последовательностью элементарных действий в

Микропрограммный автомат
Микропрограммный автомат
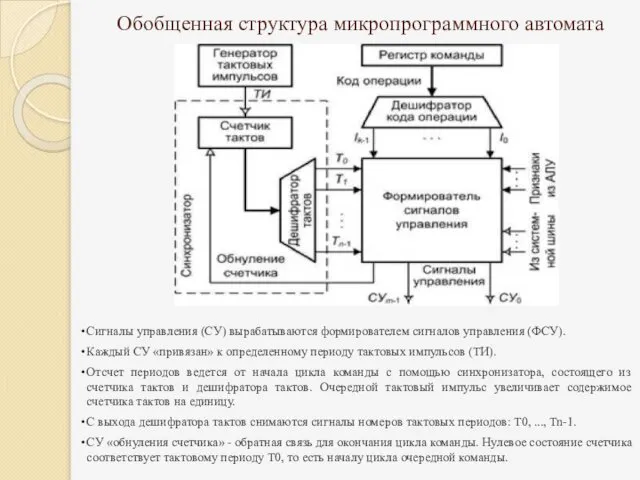
Обобщенная структура микропрограммного автомата
Сигналы управления (СУ) вырабатываются формирователем сигналов управления (ФСУ).
Каждый
Обобщенная структура микропрограммного автомата
Сигналы управления (СУ) вырабатываются формирователем сигналов управления (ФСУ).
Каждый
Микропрограммный автомат
Наибольшее распространение получили два варианта микропрограммных автоматов:
с аппаратной или «жесткой»
Микропрограммный автомат
Наибольшее распространение получили два варианта микропрограммных автоматов:
с аппаратной или «жесткой»
Микропрограммный автомат с аппаратной логикой
Каждый используемый в ВМ сигнал управления описывается
Микропрограммный автомат с аппаратной логикой
Каждый используемый в ВМ сигнал управления описывается
Команды гипотетической вычислительной машины
Команды гипотетической вычислительной машины

Функциональная схема гипотетической фон-неймановской ВМ
Функциональная схема гипотетической фон-неймановской ВМ
Обобщенная структура микропрограммного автомата
Обобщенная структура микропрограммного автомата

Описание сигналов управления и моментов их формирования
Описание сигналов управления и моментов их формирования
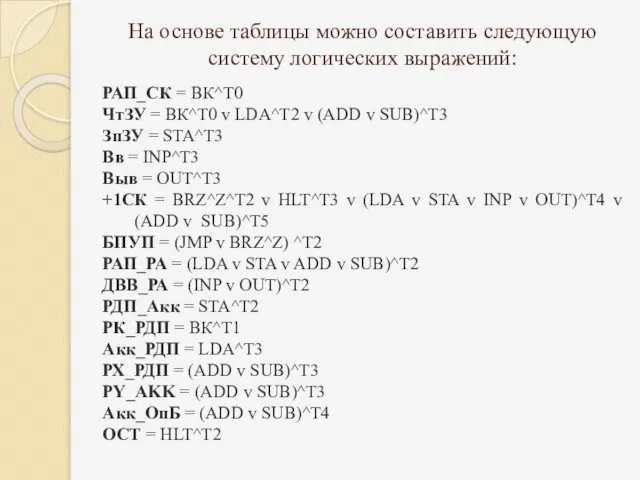
На основе таблицы можно составить следующую систему логических выражений:
РАП_СК = ВК^Т0
ЧтЗУ
На основе таблицы можно составить следующую систему логических выражений:
РАП_СК = ВК^Т0
ЧтЗУ
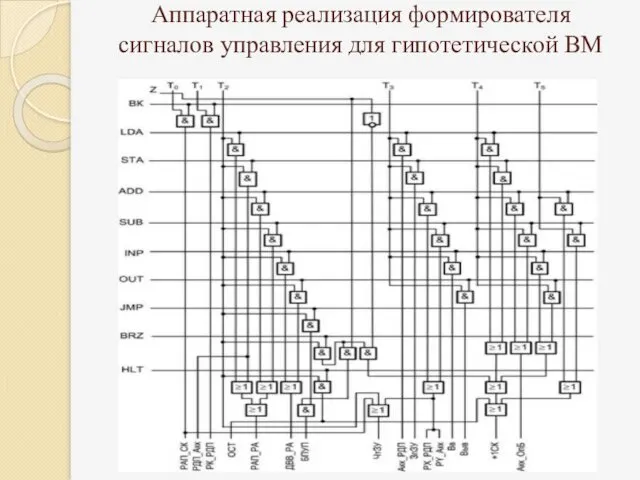
Аппаратная реализация формирователя сигналов управления для гипотетической ВМ
Аппаратная реализация формирователя сигналов управления для гипотетической ВМ
Микропрограммный автомат с аппаратной логикой
Основное достоинством МПА с аппаратной логикой:
комбинационная схема
Микропрограммный автомат с аппаратной логикой
Основное достоинством МПА с аппаратной логикой:
комбинационная схема
Микропрограммный автомат с программируемой логикой
Сигналы управления в МПА с программируемой логикой
Микропрограммный автомат с программируемой логикой
Сигналы управления в МПА с программируемой логикой
Микропрограммный автомат с программируемой логикой
Микропрограммный автомат с программируемой логикой
Микропрограммный автомат с программируемой логикой
Микропрограммный автомат с программируемой логикой не является
Микропрограммный автомат с программируемой логикой
Микропрограммный автомат с программируемой логикой не является
Микропрограммный автомат с программируемой логикой
Микропрограммный автомат с программируемой логикой

Функциональная схема гипотетической фон-неймановской ВМ
Функциональная схема гипотетической фон-неймановской ВМ
 Свариваемость сталей и сплавов
Свариваемость сталей и сплавов Структура физических знаний
Структура физических знаний Дерматополимиозит. Этиологиясы
Дерматополимиозит. Этиологиясы Стадии развития групп презентация
Стадии развития групп презентация Наполненные полимеры. Структура и физико-химические свойства. Введение
Наполненные полимеры. Структура и физико-химические свойства. Введение Презентация к конкурсной семейной программе Как домовёнок Кузя семью искал
Презентация к конкурсной семейной программе Как домовёнок Кузя семью искал Колебательные процессы
Колебательные процессы Дети войны
Дети войны Блаженная Ксения Петербургская
Блаженная Ксения Петербургская 20240104_kursy_po_vyboru
20240104_kursy_po_vyboru 20230919_domashniy_ochag
20230919_domashniy_ochag Презентация-семинар Методика Никитиных
Презентация-семинар Методика Никитиных Проектирование системы РСПД Аст-Петрол
Проектирование системы РСПД Аст-Петрол Тайны озёр смерти
Тайны озёр смерти Какие службы защищают население?
Какие службы защищают население? Эффективное общение
Эффективное общение С чего начинаются шахматы
С чего начинаются шахматы Абайдың педагогикалық ой -тағылымдары
Абайдың педагогикалық ой -тағылымдары Актуальные аспекты управления качеством таможенных услуг
Актуальные аспекты управления качеством таможенных услуг Народный художественный промысел России
Народный художественный промысел России Работы по шумоизоляции, вентиляции
Работы по шумоизоляции, вентиляции Өзіміз туралы айтайық
Өзіміз туралы айтайық презентация Правила движения - достойны уважения.
презентация Правила движения - достойны уважения. Об ответственности родителей...
Об ответственности родителей... Оформление витрин и контроль их состояния
Оформление витрин и контроль их состояния Презентация по технологии _Как это устроено
Презентация по технологии _Как это устроено Обряды на Егорьев день. Образ Георгия Победоносца
Обряды на Егорьев день. Образ Георгия Победоносца Презентация Успешный учитель-успешный ученик
Презентация Успешный учитель-успешный ученик