- Вимірювання координат і параметрів руху цілей

Содержание
- 2. Методи дальнометрії. Методи вимірювання кутових координат. Методи вимірювання швидкості. Питання заняття
- 3. Методи дальнометрії В активній суміщеній РЛС дальність до цілі визначається виразом: де С – швидкість розповсюдження
- 4. 1.1 Імпульсний метод дальнометрії. Суть методу. Імпульсний метод дальнометрії засновано на безпосередньому вимірюванні часу запізнювання відбитого
- 5. Рис. 2. Часові діаграми до структурної схеми імпульсної РЛС
- 6. Синхронізатор – забезпечує одночасний запуск передавального й індикаторного пристроїв. Виробляє короткі відеоімпульси (тривалість порядку одиниць мікросекунд)
- 7. Рис. 3. Пояснення до принципу роботи амплітудного індикатора РЛС Передавач і ГПН запускаються водночас імпульсами синхронізатора,
- 8. Індикатори з амплітудною відміткою часто називають індикаторами типу А. В РЛС кругового огляду використовують індикатори з
- 9. Частота повторення Fn зондувальних імпульсів вибирається за умов однозначного вимірювання дальності до цілі. Однозначне визначення дальності
- 10. Роздільна здатність по дальності. Тривалість ЗС значно менша за період повторення цих імпульсів. Це дозволяє вимірювати
- 11. Реальна роздільна здатність відрізняється від потенціальної і в загальному випадку залежить від ступеня спотворення форми імпульсу
- 12. Переваги та недоліки методу. Переваги: 1. Випромінювання ЗС і прийом відбитого від цілі сигналу рознесенні у
- 13. Недоліки: 1. Для забезпечення великої дальності виявлення треба випромінювати велику імпульсну потужність, що обмежується можливим пробоєм
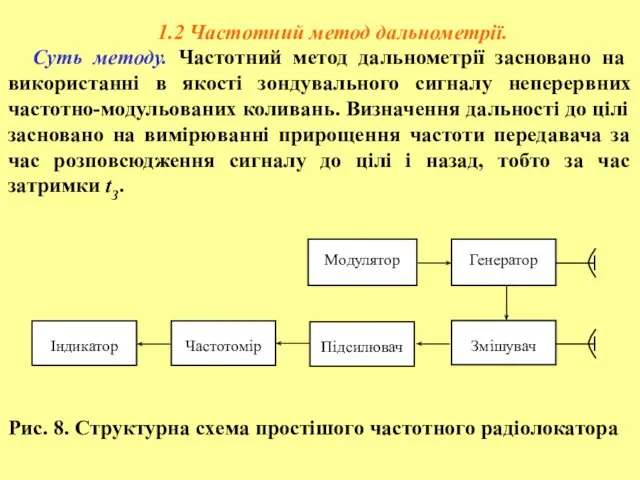
- 14. 1.2 Частотний метод дальнометрії. Суть методу. Частотний метод дальнометрії засновано на використанні в якості зондувального сигналу
- 15. При лінійному змінюванні частоти ЗС f(t)=kt, де k – крутизна модуляційної характеристики генератора k = Δfм
- 16. Переваги та недоліки методу. Переваги: 1. Великі можливості щодо підвищення енергетичного потенціалу в зв’язку з використанням
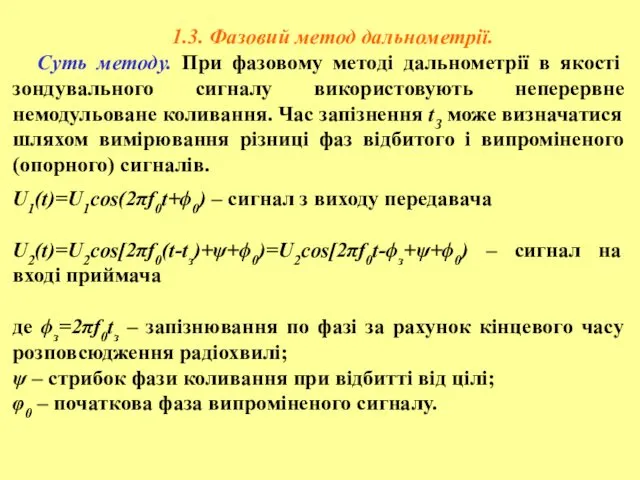
- 17. 1.3. Фазовий метод дальнометрії. Суть методу. При фазовому методі дальнометрії в якості зондувального сигналу використовують неперервне
- 18. Як видно, прийняті коливання відрізняються від опорних зсувом фази φз , котрий несе інформацію про дальність
- 19. Рис. 10. Спрощена структурна схема двохчастотної фазової РЛС
- 20. Передавачі, що мають однакову потужність, працюють на близьких, але різних частотах f1 i f2. Вихідні сигнали
- 21. Різницеву частоту FP вибирають з двох протирічних умов: 1. Необхідність забезпечення однозначності відліку дальності 2. Необхідність
- 22. Переваги та недоліки методу. Переваги: 1. Великі можливості щодо збільшення енергетичного потенціалу. 2. Відсутність “мертвої зони”,
- 23. Процес вимірювання кутових координат називають радіопеленгацією. Пеленгація розв’язує задачі визначення двох координат або пеленгів цілі: азимуту
- 24. При амплітудному методі кутове положення цілі (пеленг цілі) визначають за результатом аналізу амплітуди сигналу на виході
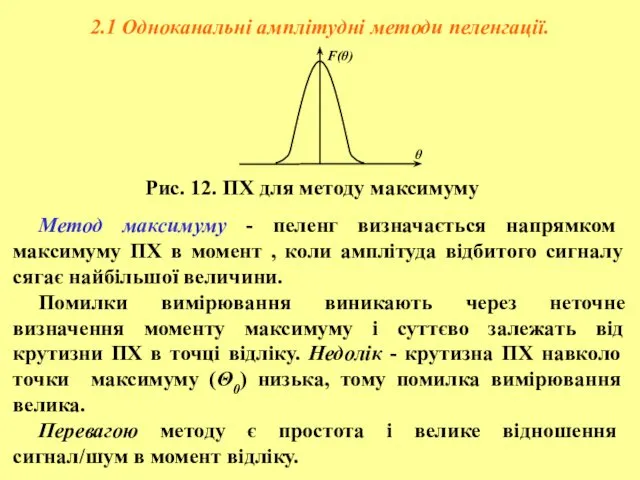
- 25. 2.1 Одноканальні амплітудні методи пеленгації. Метод максимуму - пеленг визначається напрямком максимуму ПХ в момент ,
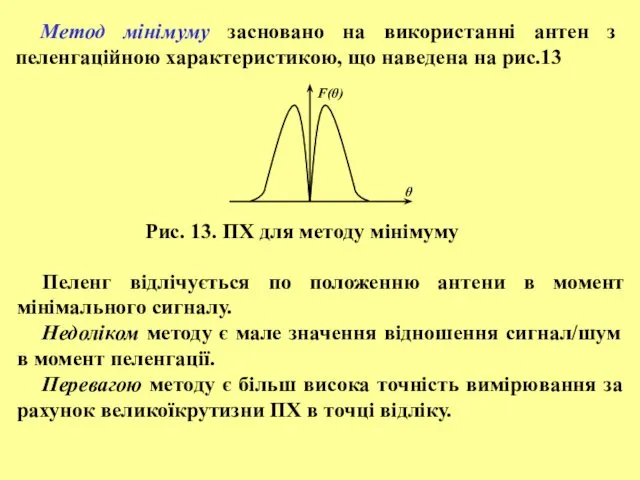
- 26. Метод мінімуму засновано на використанні антен з пеленгаційною характеристикою, що наведена на рис.13 Рис. 13. ПХ
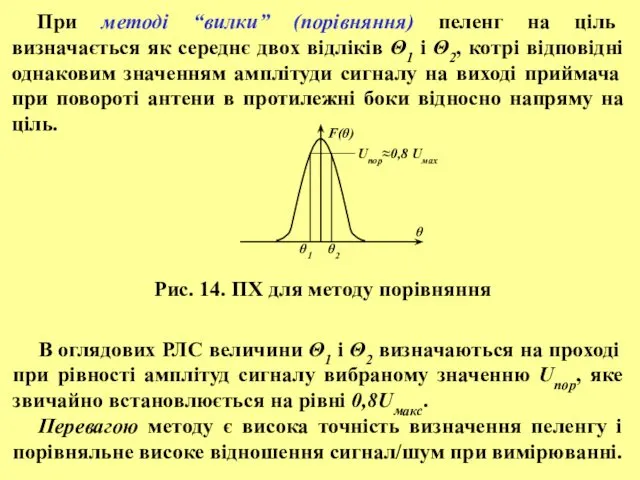
- 27. При методі “вилки” (порівняння) пеленг на ціль визначається як середнє двох відліків Θ1 і Θ2, котрі
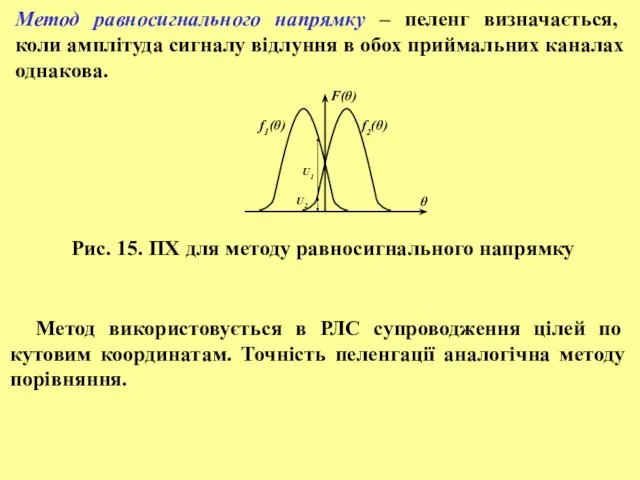
- 28. Метод равносигнального напрямку – пеленг визначається, коли амплітуда сигналу відлуння в обох приймальних каналах однакова. Рис.
- 29. Рис. 16 Схема одноканального пеленгатора побудованого по рівносигнальному методу Основним недоліком одноканальних пеленгаторів є те, що
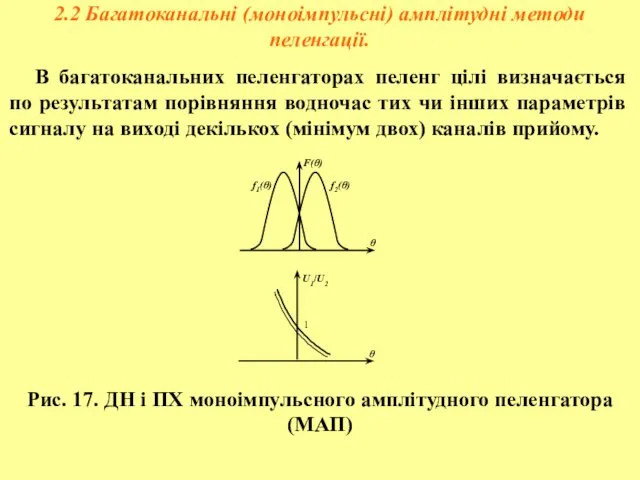
- 30. 2.2 Багатоканальні (моноімпульсні) амплітудні методи пеленгації. В багатоканальних пеленгаторах пеленг цілі визначається по результатам порівняння водночас
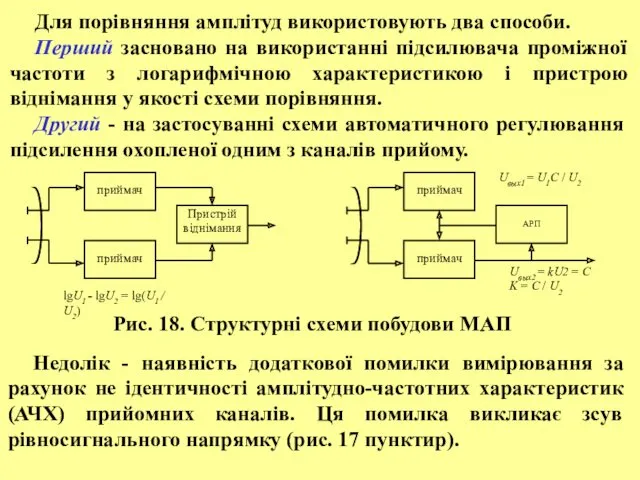
- 31. Для порівняння амплітуд використовують два способи. Перший засновано на використанні підсилювача проміжної частоти з логарифмічною характеристикою
- 32. Рис. 19. Структурна схема МАП з сумарно-різницевою обробкою сигналів Рис. 20. ДН і сумарно-різницева її характеристика
- 33. Рис. 21. ПХ сумарно-різницевого МАП Нестабільність АЧХ каналів не приводить до зсуву РСН (рис.21 пунктир). Помилка
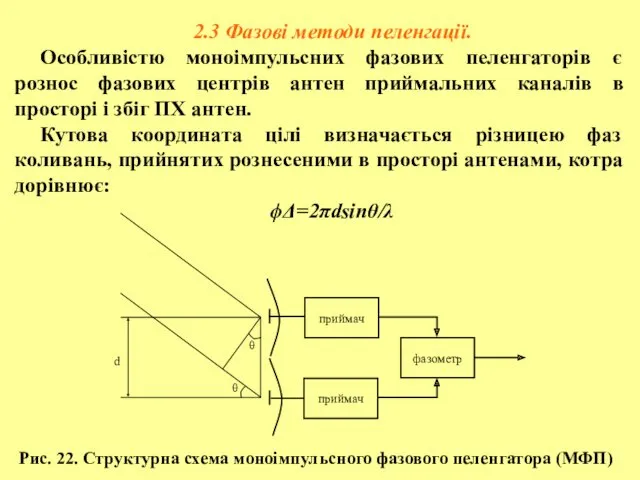
- 34. 2.3 Фазові методи пеленгації. Особливістю моноімпульсних фазових пеленгаторів є рознос фазових центрів антен приймальних каналів в
- 35. Для однозначного визначення кутового відхилення необхідно, щоб відстань d між фазовими центрами антен дорівнювала розкриву антени.
- 37. Скачать презентацию
Методи дальнометрії.
Методи вимірювання кутових координат.
Методи вимірювання швидкості.
Питання заняття
Методи дальнометрії.
Методи вимірювання кутових координат.
Методи вимірювання швидкості.
Питання заняття
Методи дальнометрії
В активній суміщеній РЛС дальність до цілі визначається виразом:
де С
Методи дальнометрії
В активній суміщеній РЛС дальність до цілі визначається виразом:
де С
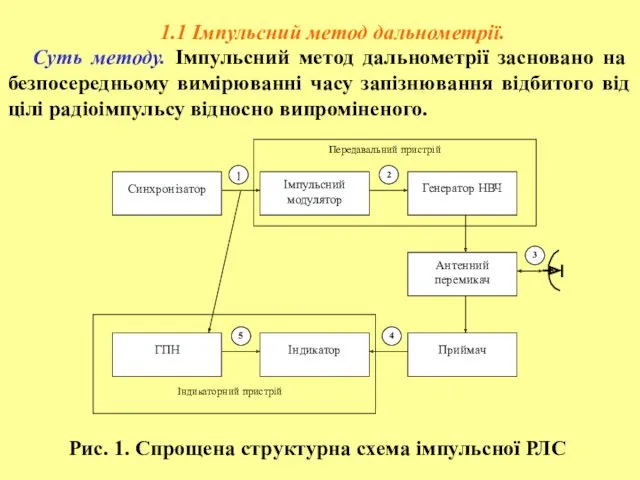
1.1 Імпульсний метод дальнометрії.
Суть методу. Імпульсний метод дальнометрії засновано на безпосередньому
1.1 Імпульсний метод дальнометрії.
Суть методу. Імпульсний метод дальнометрії засновано на безпосередньому
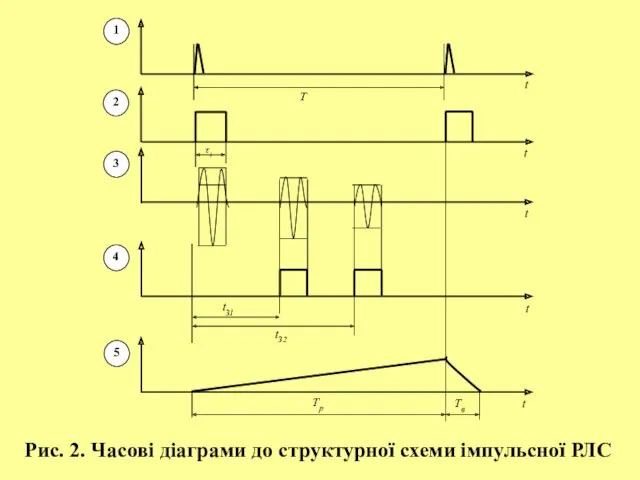
Рис. 2. Часові діаграми до структурної схеми імпульсної РЛС
Рис. 2. Часові діаграми до структурної схеми імпульсної РЛС
Синхронізатор – забезпечує одночасний запуск передавального й індикаторного пристроїв. Виробляє короткі
Синхронізатор – забезпечує одночасний запуск передавального й індикаторного пристроїв. Виробляє короткі
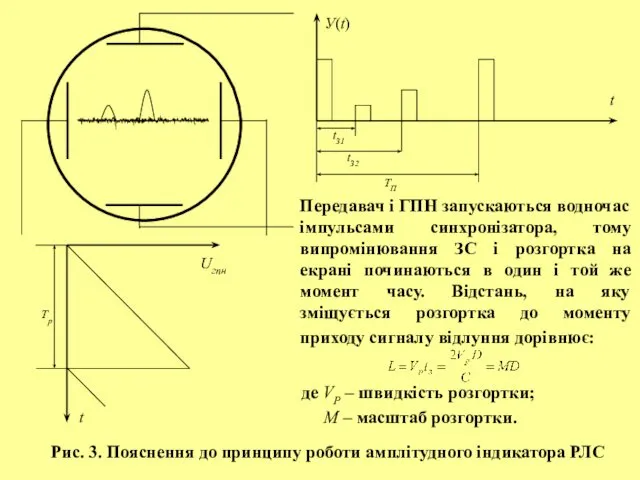
Рис. 3. Пояснення до принципу роботи амплітудного індикатора РЛС
Передавач і
Рис. 3. Пояснення до принципу роботи амплітудного індикатора РЛС
Передавач і
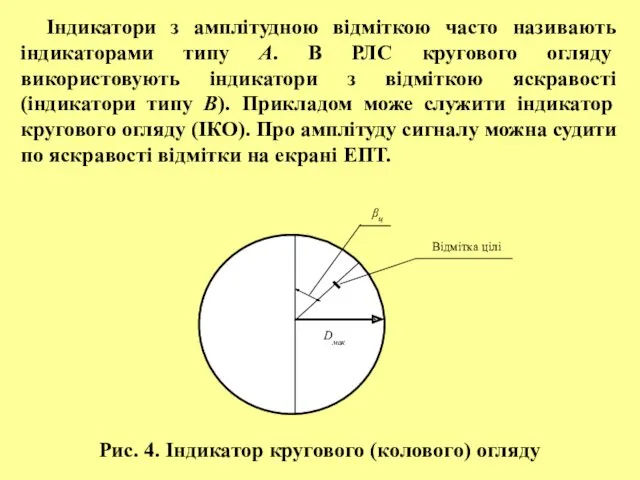
Індикатори з амплітудною відміткою часто називають індикаторами типу А. В РЛС
Індикатори з амплітудною відміткою часто називають індикаторами типу А. В РЛС
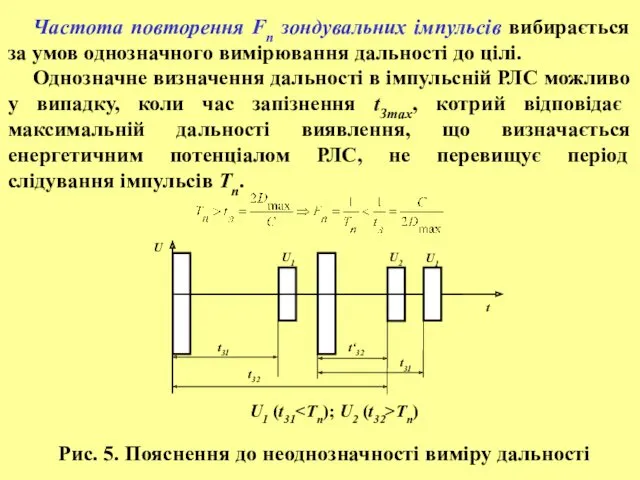
Частота повторення Fn зондувальних імпульсів вибирається за умов однозначного вимірювання дальності
Частота повторення Fn зондувальних імпульсів вибирається за умов однозначного вимірювання дальності
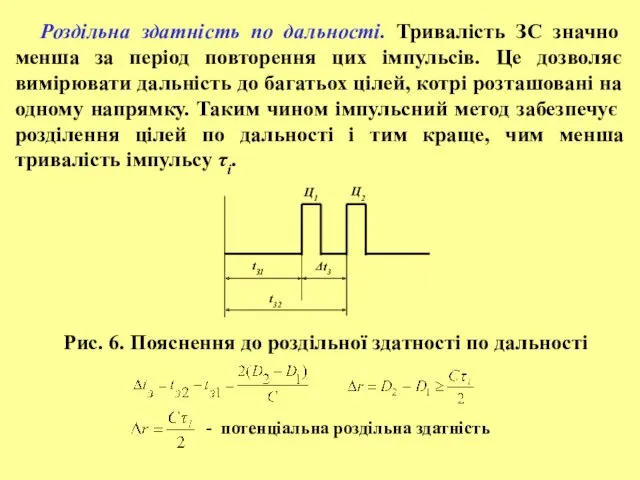
Роздільна здатність по дальності. Тривалість ЗС значно менша за період повторення
Роздільна здатність по дальності. Тривалість ЗС значно менша за період повторення
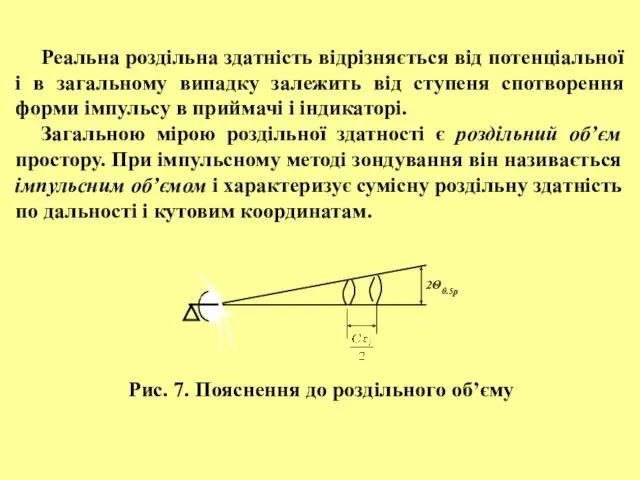
Реальна роздільна здатність відрізняється від потенціальної і в загальному випадку залежить
Реальна роздільна здатність відрізняється від потенціальної і в загальному випадку залежить
Переваги та недоліки методу.
Переваги: 1. Випромінювання ЗС і прийом відбитого від
Переваги та недоліки методу.
Переваги: 1. Випромінювання ЗС і прийом відбитого від
Недоліки: 1. Для забезпечення великої дальності виявлення треба випромінювати велику імпульсну
Недоліки: 1. Для забезпечення великої дальності виявлення треба випромінювати велику імпульсну
1.2 Частотний метод дальнометрії.
Суть методу. Частотний метод дальнометрії засновано на
1.2 Частотний метод дальнометрії.
Суть методу. Частотний метод дальнометрії засновано на
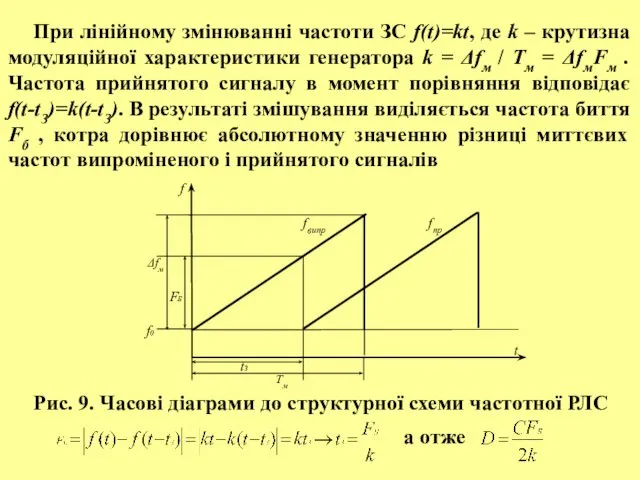
При лінійному змінюванні частоти ЗС f(t)=kt, де k – крутизна модуляційної
При лінійному змінюванні частоти ЗС f(t)=kt, де k – крутизна модуляційної
Переваги та недоліки методу.
Переваги: 1. Великі можливості щодо підвищення енергетичного потенціалу
Переваги та недоліки методу.
Переваги: 1. Великі можливості щодо підвищення енергетичного потенціалу
1.3. Фазовий метод дальнометрії.
Суть методу. При фазовому методі дальнометрії в якості
1.3. Фазовий метод дальнометрії.
Суть методу. При фазовому методі дальнометрії в якості
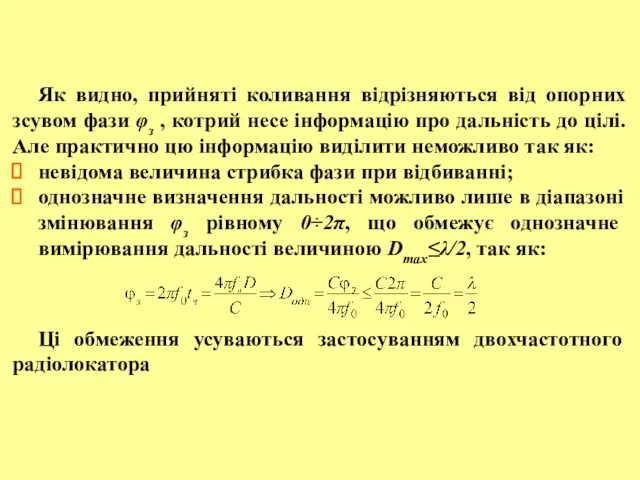
Як видно, прийняті коливання відрізняються від опорних зсувом фази φз ,
Як видно, прийняті коливання відрізняються від опорних зсувом фази φз ,
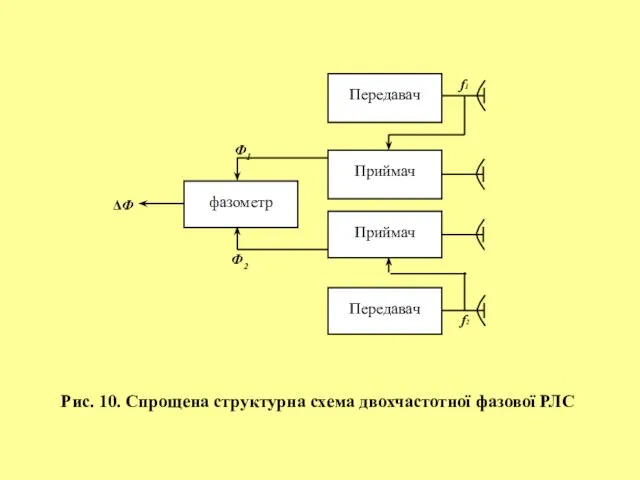
Рис. 10. Спрощена структурна схема двохчастотної фазової РЛС
Рис. 10. Спрощена структурна схема двохчастотної фазової РЛС
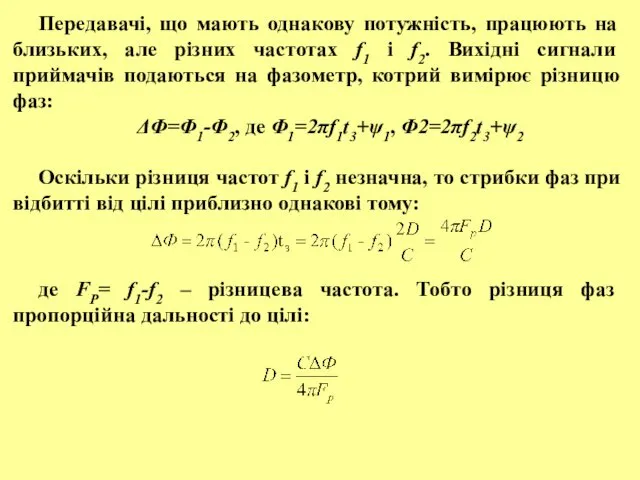
Передавачі, що мають однакову потужність, працюють на близьких, але різних частотах
Передавачі, що мають однакову потужність, працюють на близьких, але різних частотах
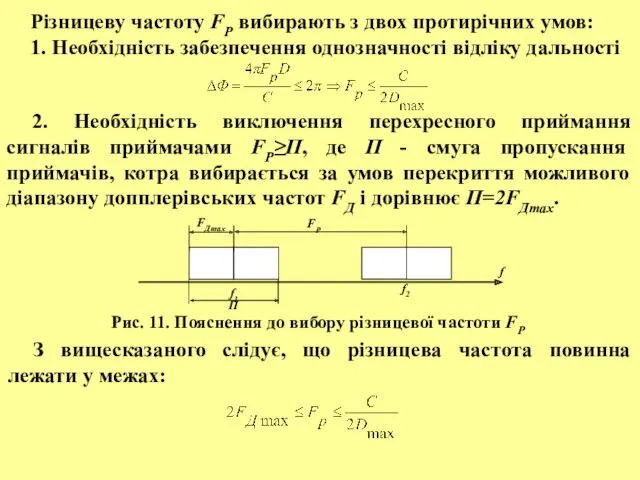
Різницеву частоту FP вибирають з двох протирічних умов:
1. Необхідність забезпечення однозначності
Різницеву частоту FP вибирають з двох протирічних умов:
1. Необхідність забезпечення однозначності
Переваги та недоліки методу.
Переваги: 1. Великі можливості щодо збільшення енергетичного потенціалу.
2.
Переваги та недоліки методу.
Переваги: 1. Великі можливості щодо збільшення енергетичного потенціалу.
2.

Процес вимірювання кутових координат називають радіопеленгацією. Пеленгація розв’язує задачі визначення двох
Процес вимірювання кутових координат називають радіопеленгацією. Пеленгація розв’язує задачі визначення двох
При амплітудному методі кутове положення цілі (пеленг цілі) визначають за результатом
При амплітудному методі кутове положення цілі (пеленг цілі) визначають за результатом
2.1 Одноканальні амплітудні методи пеленгації.
Метод максимуму - пеленг визначається напрямком
2.1 Одноканальні амплітудні методи пеленгації.
Метод максимуму - пеленг визначається напрямком
Метод мінімуму засновано на використанні антен з пеленгаційною характеристикою, що наведена
Метод мінімуму засновано на використанні антен з пеленгаційною характеристикою, що наведена
При методі “вилки” (порівняння) пеленг на ціль визначається як середнє двох
При методі “вилки” (порівняння) пеленг на ціль визначається як середнє двох
Метод равносигнального напрямку – пеленг визначається, коли амплітуда сигналу відлуння в
Метод равносигнального напрямку – пеленг визначається, коли амплітуда сигналу відлуння в
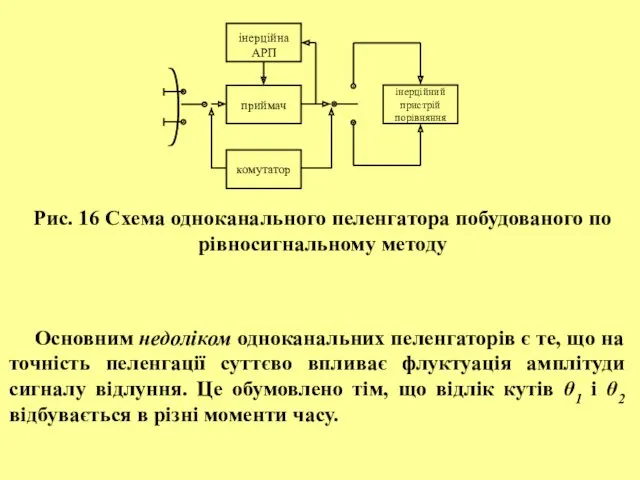
Рис. 16 Схема одноканального пеленгатора побудованого по рівносигнальному методу
Основним недоліком одноканальних
Рис. 16 Схема одноканального пеленгатора побудованого по рівносигнальному методу
Основним недоліком одноканальних
2.2 Багатоканальні (моноімпульсні) амплітудні методи пеленгації.
В багатоканальних пеленгаторах пеленг цілі
2.2 Багатоканальні (моноімпульсні) амплітудні методи пеленгації.
В багатоканальних пеленгаторах пеленг цілі
Для порівняння амплітуд використовують два способи.
Перший засновано на використанні підсилювача проміжної
Для порівняння амплітуд використовують два способи.
Перший засновано на використанні підсилювача проміжної
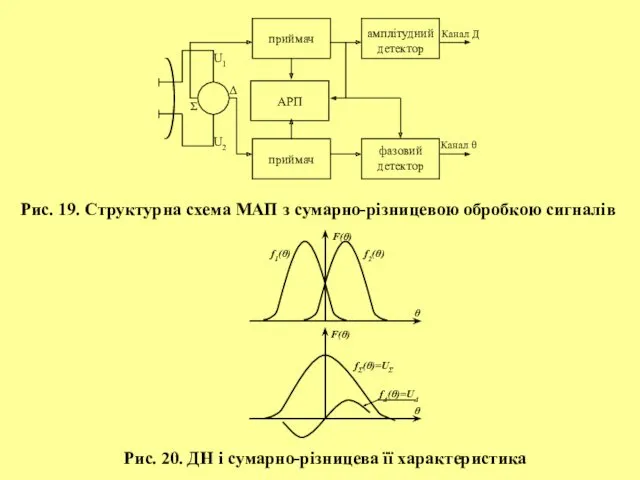
Рис. 19. Структурна схема МАП з сумарно-різницевою обробкою сигналів
Рис. 20.
Рис. 19. Структурна схема МАП з сумарно-різницевою обробкою сигналів
Рис. 20.
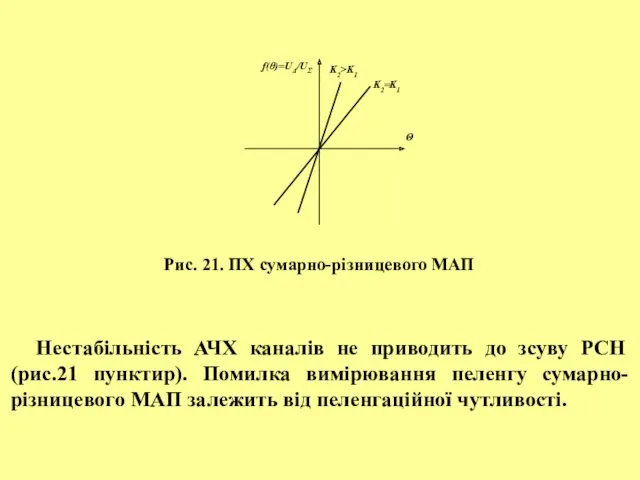
Рис. 21. ПХ сумарно-різницевого МАП
Нестабільність АЧХ каналів не приводить до
Рис. 21. ПХ сумарно-різницевого МАП
Нестабільність АЧХ каналів не приводить до
2.3 Фазові методи пеленгації.
Особливістю моноімпульсних фазових пеленгаторів є рознос фазових центрів
2.3 Фазові методи пеленгації.
Особливістю моноімпульсних фазових пеленгаторів є рознос фазових центрів
Для однозначного визначення кутового відхилення необхідно, щоб відстань d між фазовими
Для однозначного визначення кутового відхилення необхідно, щоб відстань d між фазовими
 Торжественная линенйка, посвященная инаугурации президента школы
Торжественная линенйка, посвященная инаугурации президента школы Дифференциация звуков К - Г
Дифференциация звуков К - Г Проблемы совершенствования системы обучения и повышения квалификации государственных и муниципальных служащих в Пермском крае
Проблемы совершенствования системы обучения и повышения квалификации государственных и муниципальных служащих в Пермском крае Правовой статус редакции
Правовой статус редакции Основы военной метеорологии
Основы военной метеорологии Воспитание навыков безопасного поведения у детей дошкольного возраста
Воспитание навыков безопасного поведения у детей дошкольного возраста Тест з сольфеджіо
Тест з сольфеджіо Итоги работы путевой машинной станции № 55
Итоги работы путевой машинной станции № 55 Нормальная микрофлора тела животных. Роль микроорганизмов в круговороте веществ в природе
Нормальная микрофлора тела животных. Роль микроорганизмов в круговороте веществ в природе Презентация к выступлению Тема: Дифференцированное обучение в начальной школе
Презентация к выступлению Тема: Дифференцированное обучение в начальной школе Одуванчик
Одуванчик Прибавить и вычесть число 1
Прибавить и вычесть число 1 Техники и практики формирования читательской грамотности на уроке русского языка и литературы
Техники и практики формирования читательской грамотности на уроке русского языка и литературы Презентация уголка по развитию речи
Презентация уголка по развитию речи Идеальный и реальный газ
Идеальный и реальный газ Состав первичного сектора экономики. Природные ресурсы. Вопросы и задания
Состав первичного сектора экономики. Природные ресурсы. Вопросы и задания Язык, как система систем
Язык, как система систем что такое кинезиология
что такое кинезиология Памятка - рекомендации для педагогов по составлению статьи
Памятка - рекомендации для педагогов по составлению статьи Сохранение церковного наследия в с. Красное
Сохранение церковного наследия в с. Красное Электрокардиографические исследования
Электрокардиографические исследования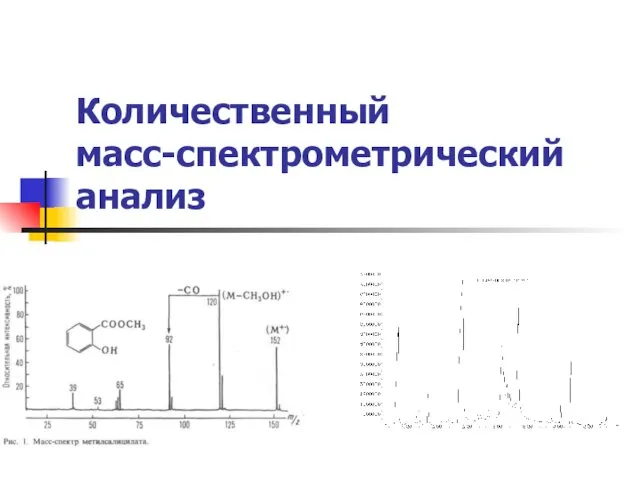 Количественный масс-спектрометрический анализ
Количественный масс-спектрометрический анализ Structura financiară a întreprinderii
Structura financiară a întreprinderii Горы и равнины
Горы и равнины презентация для самообразования учителей о Кембриджской Программе внедрения семи модулей, как Новых подходах в воспитании и обучении детей.
презентация для самообразования учителей о Кембриджской Программе внедрения семи модулей, как Новых подходах в воспитании и обучении детей. Железнодорожный вокзал Ростов-Главный
Железнодорожный вокзал Ростов-Главный Взаимодействие с СУБД. Лекция 5
Взаимодействие с СУБД. Лекция 5 Конспект и презентация к занятию Декоративная бабочка
Конспект и презентация к занятию Декоративная бабочка