- Вычисление физического адреса

Содержание
- 2. МИКРОПРОЦЕССОР К1810ВМ86 ИЛИ INTEL 8086 Технические характеристики микропроцессора: Тактовая частота F=12МГц; Среднее быстродействие – 1,66 млн.
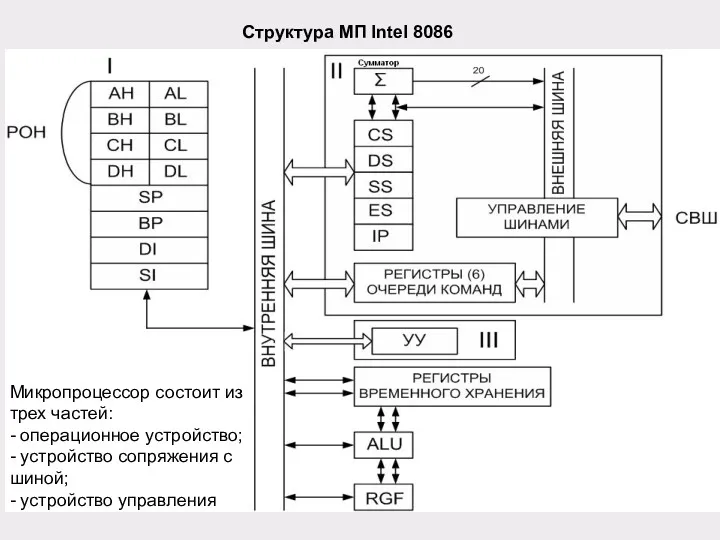
- 3. Структура МП Intel 8086 Микропроцессор состоит из трех частей: - операционное устройство; - устройство сопряжения с
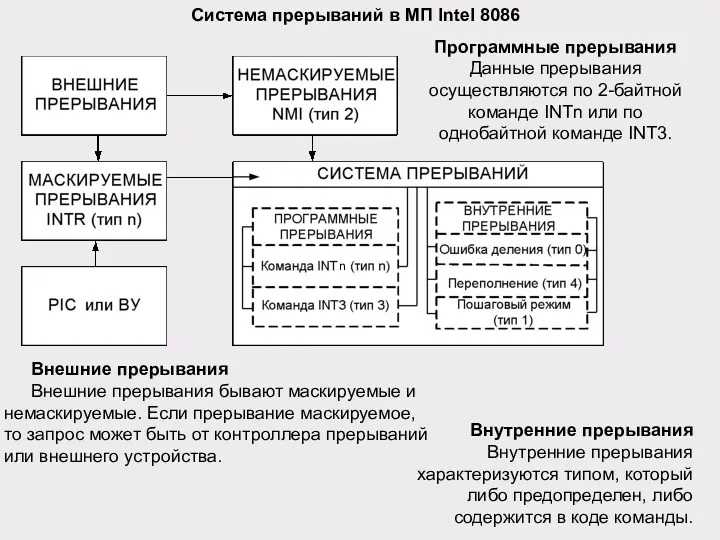
- 4. Система прерываний в МП Intel 8086 Внешние прерывания Внешние прерывания бывают маскируемые и немаскируемые. Если прерывание
- 5. Примеры конфигураций МПС на базе центрального процессора (ВМ86) и сопроцессора ввода/вывода (ВМ89) Сопроцессор и процессор могут
- 6. Местная конфигурация Удаленная конфигурация В местной конфигурации сопроцессор и центральный процессор совместно используют шины. Арбитраж осуществляется
- 7. Адресация к памяти ЦП Структурно память микропроцессора делится на два блока: с четными и нечетными адресами
- 8. КЭШ – память и ее особенности КЭШ – память – быстродействующая память небольшой емкости между центральным
- 9. Функциональная схема подключения центрального процессора и сопроцессора INT 8 INT 7
- 10. Принцип построения МП на базе К1810ВМ86, включенного в максимальном режиме
- 11. МИКРОКОНТРОЛЛЕРЫ Внутренние компоненты МК: АЛУ, устройство управления, регистры, счетчик команд, стековый указатель, имеется внутренняя (резидентная) память
- 12. Восьмиразрядные микроконтроллеры
- 13. Микроконтроллер КР1816ВЕ51 или Intel 8051АН число выводов - 40; питание - +5В; тактовая частота 1-12 МГц;
- 14. Характеристика основных компонентов МК51
- 15. Система прерываний МК51
- 16. Совмещение адресного пространства МК51 Здесь на выходе схемы формируется строб-сигнал чтения, который может быть использован для
- 17. Последовательности выборки и выполнения команд
- 18. Программирование МК
- 19. Запись бита защиты Бит защиты РПП, будучи установлен, запрещает доступ к РПП любыми внешними средствами
- 20. Система команд в МК51 Система команд в МК51 Система команд МК51 содержит 111 базовых команд, которые
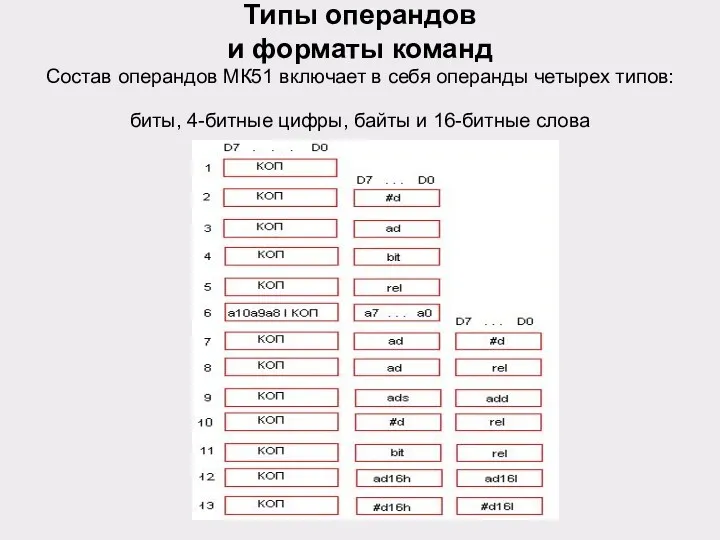
- 21. Типы операндов и форматы команд Состав операндов МК51 включает в себя операнды четырех типов: биты, 4-битные
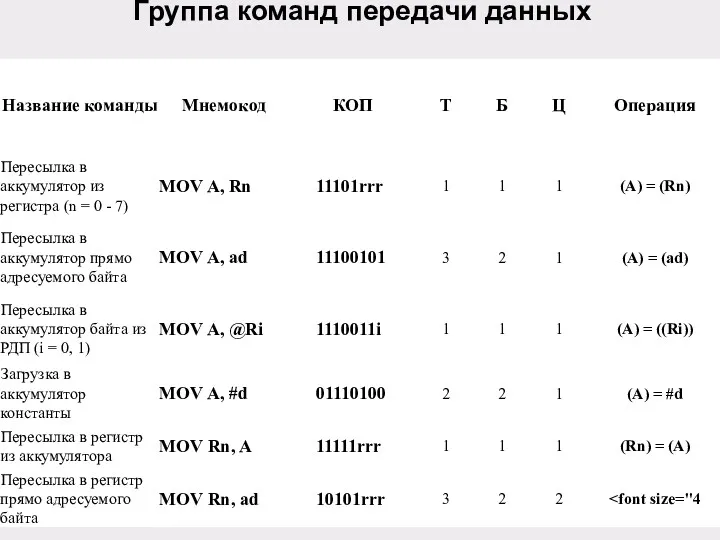
- 22. Группа команд передачи данных
- 23. Схема подключения МК к клавиатуре и дисплею с использованием контроллера, клавиатуры и дисплея
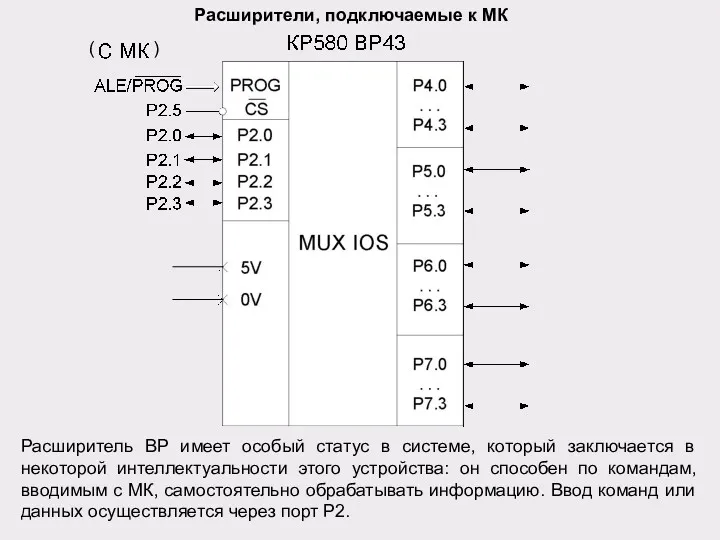
- 24. Расширители, подключаемые к МК Расширитель ВР имеет особый статус в системе, который заключается в некоторой интеллектуальности
- 25. Расширитель содержит 4 4-х разрядных 3-х стабильных двунаправленных порта для связи со внешними устройствами. А также
- 26. Аналоговый микропроцессор КМ1813ВЕ1 УГО: в режиме «Работа» в режиме «Программирование»
- 27. Технические характеристики КМ1813ВЕ1: 1. Способ управления – микропрограммный; 2. Способ синхронизации – от внешнего или внутреннего
- 28. Структура системы самоконтроля Адаптер
- 30. Схема контроля выполнения программы по таймеру
- 31. Светодиодное табло на базе микроконтроллера
- 32. Схема светодиодного вращающегося табло
- 33. Структурная схема терморегулятора
- 34. Решение задачи охлаждения пропорциональным методом регулирования
- 35. Двухпозиционный метод терморегулирования
- 36. Динамика процесса термостабилизации двухпозиционным методом
- 37. Структурная схема и уравнение ПИД - регулятора
- 38. Структурная схема устройства
- 39. Принципиальная схема стенда
- 40. Алгоритм управляющей программы для микроконтроллера
- 41. Виды задач, подлежащих решению в ходе практических занятий охлаждение термостабилизация Физический объект
- 42. Графический интерфейс системы управления стендом
- 43. Пример решения задачи охлаждения
- 44. Стабилизация температуры двухпозиционным методом
- 45. Стабилизация температуры двухпозиционным методом (динамика процесса)
- 46. Влияние пропорциональной составляющей ПИД-регулятора на динамику процесса термостабилизации
- 47. Влияние пропорциональной составляющей ПИД-регулятора на динамику процесса термостабилизации
- 48. Устройство управления, связанное с ПК через COM порт
- 49. Схема для просмотра ПЗУ микроконтроллера
- 50. Контроллер для управления шаговым двигателем
- 51. ИК-приемник системы дистанционного управления на 10 выходов
- 52. Таймер для управления нагрузкой на PIC16f628
- 53. Схема логического анализатора
- 55. Скачать презентацию
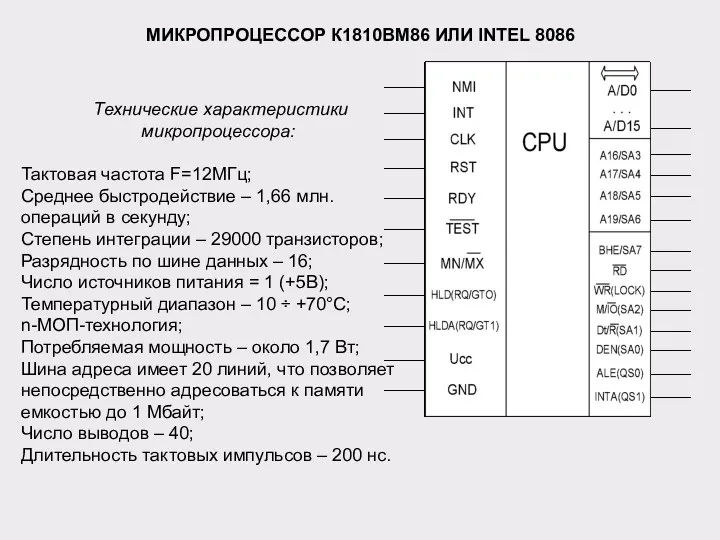
МИКРОПРОЦЕССОР К1810ВМ86 ИЛИ INTEL 8086
Технические характеристики микропроцессора:
Тактовая частота F=12МГц;
Среднее
МИКРОПРОЦЕССОР К1810ВМ86 ИЛИ INTEL 8086
Технические характеристики микропроцессора:
Тактовая частота F=12МГц;
Среднее
Структура МП Intel 8086
Микропроцессор состоит из трех частей:
- операционное устройство;
-
Структура МП Intel 8086
Микропроцессор состоит из трех частей:
- операционное устройство;
-
Система прерываний в МП Intel 8086
Внешние прерывания
Внешние прерывания бывают маскируемые
Система прерываний в МП Intel 8086
Внешние прерывания
Внешние прерывания бывают маскируемые
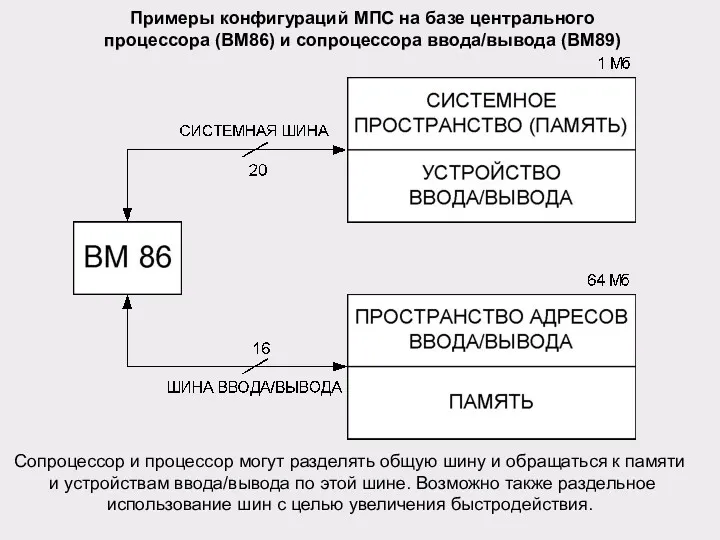
Примеры конфигураций МПС на базе центрального
процессора (ВМ86) и сопроцессора ввода/вывода
Примеры конфигураций МПС на базе центрального
процессора (ВМ86) и сопроцессора ввода/вывода
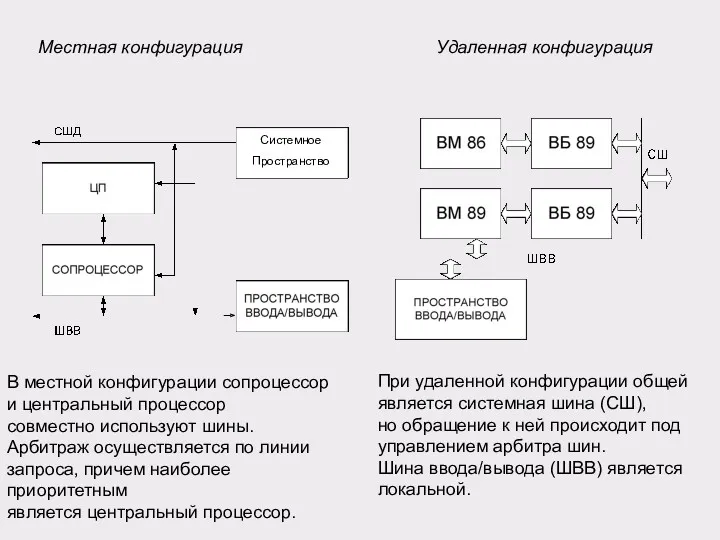
Местная конфигурация
Удаленная конфигурация
В местной конфигурации сопроцессор
и центральный процессор
Местная конфигурация
Удаленная конфигурация
В местной конфигурации сопроцессор
и центральный процессор
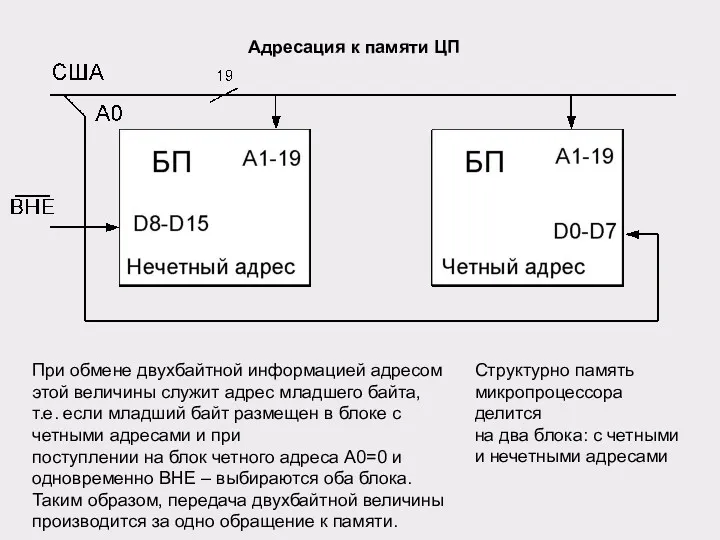
Адресация к памяти ЦП
Структурно память микропроцессора делится
на два блока:
Адресация к памяти ЦП
Структурно память микропроцессора делится
на два блока:
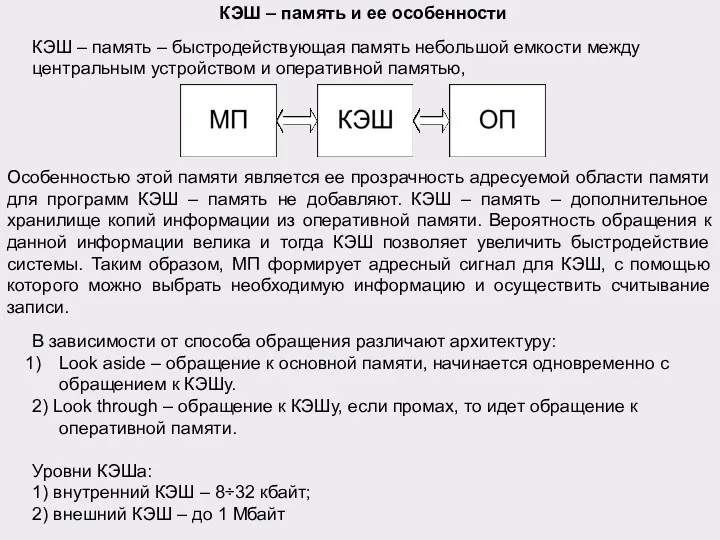
КЭШ – память и ее особенности
КЭШ – память – быстродействующая
КЭШ – память и ее особенности
КЭШ – память – быстродействующая
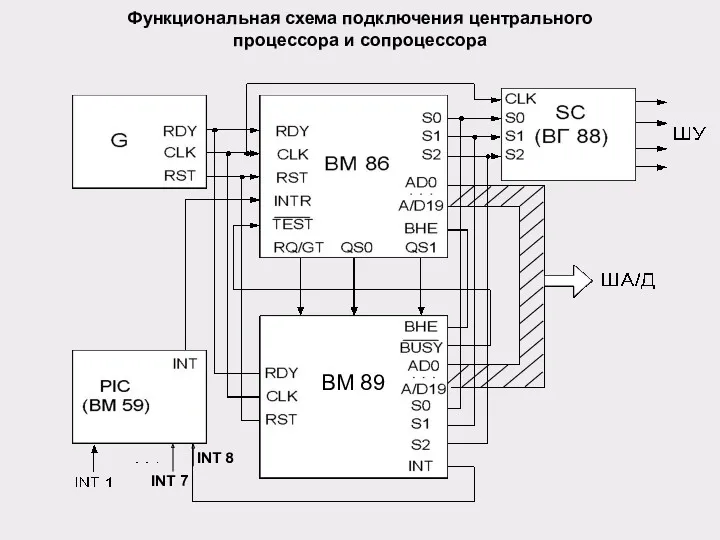
Функциональная схема подключения центрального
процессора и сопроцессора
INT 8
INT 7
Функциональная схема подключения центрального
процессора и сопроцессора
INT 8
INT 7
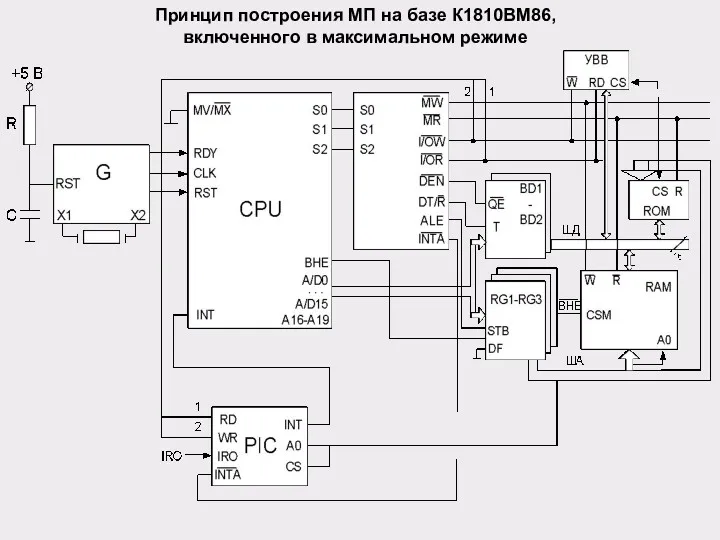
Принцип построения МП на базе К1810ВМ86,
включенного в максимальном режиме
Принцип построения МП на базе К1810ВМ86,
включенного в максимальном режиме
МИКРОКОНТРОЛЛЕРЫ
Внутренние компоненты МК:
АЛУ, устройство управления, регистры, счетчик команд, стековый указатель,
МИКРОКОНТРОЛЛЕРЫ
Внутренние компоненты МК:
АЛУ, устройство управления, регистры, счетчик команд, стековый указатель,
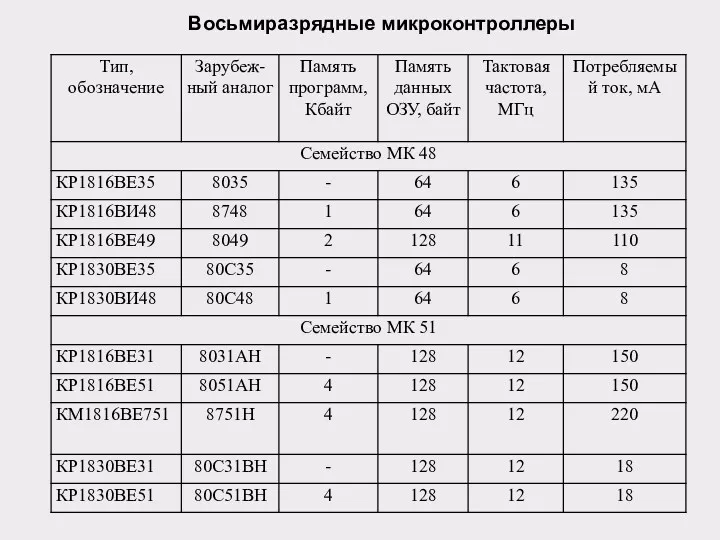
Восьмиразрядные микроконтроллеры
Восьмиразрядные микроконтроллеры
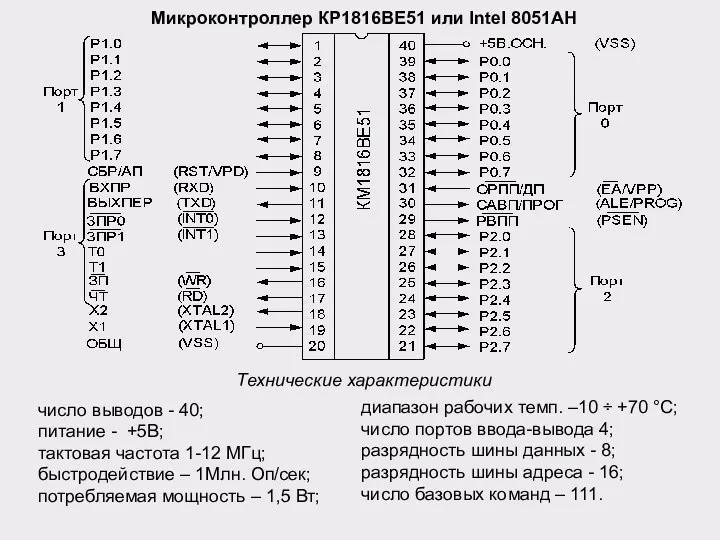
Микроконтроллер КР1816ВЕ51 или Intel 8051АН
число выводов - 40;
питание - +5В;
тактовая
Микроконтроллер КР1816ВЕ51 или Intel 8051АН
число выводов - 40;
питание - +5В;
тактовая

Характеристика основных компонентов МК51
Характеристика основных компонентов МК51
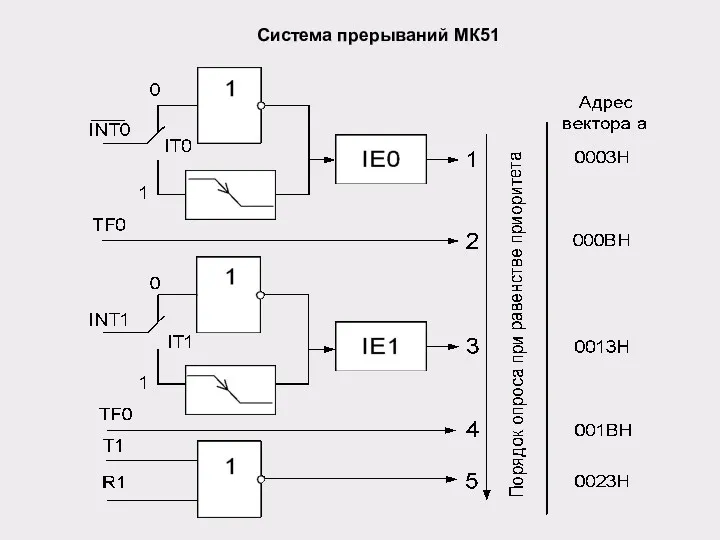
Система прерываний МК51
Система прерываний МК51
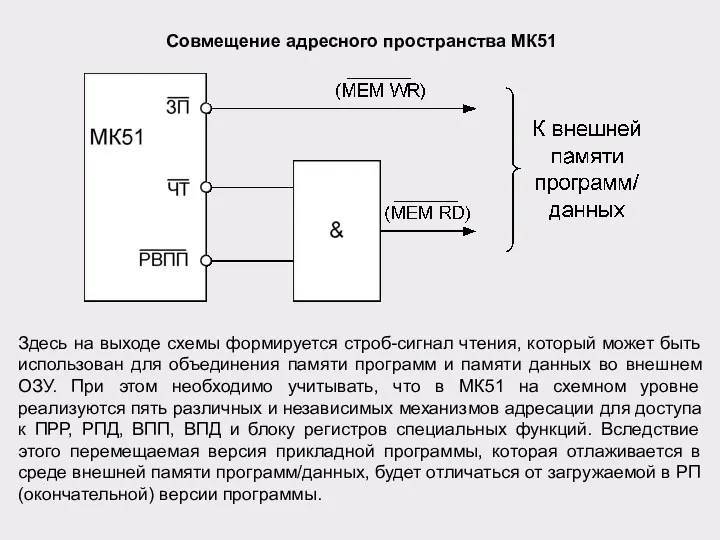
Совмещение адресного пространства МК51
Здесь на выходе схемы формируется строб-сигнал чтения, который
Совмещение адресного пространства МК51
Здесь на выходе схемы формируется строб-сигнал чтения, который
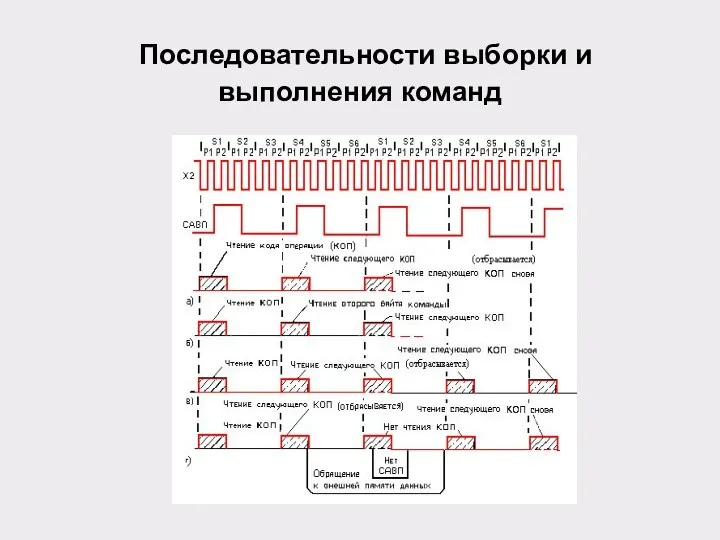
Последовательности выборки и выполнения команд
Последовательности выборки и выполнения команд

Программирование МК
Программирование МК
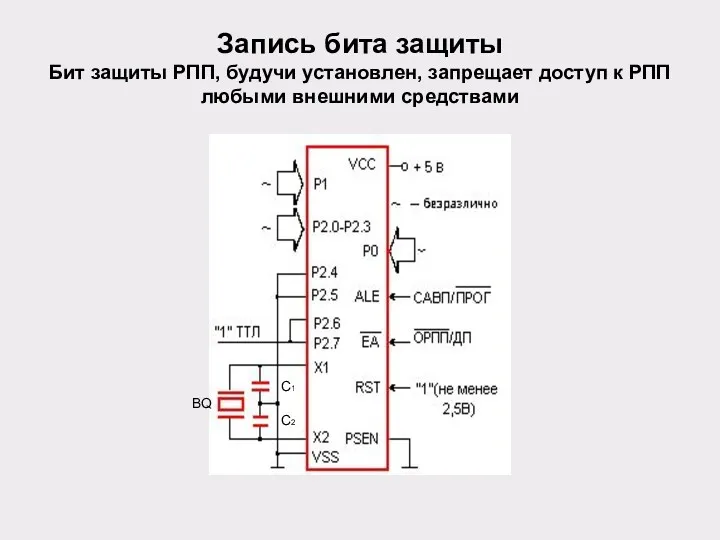
Запись бита защиты
Бит защиты РПП, будучи установлен, запрещает доступ к РПП
Запись бита защиты Бит защиты РПП, будучи установлен, запрещает доступ к РПП
Система команд в МК51
Система команд в МК51
Система команд МК51 содержит 111
Система команд в МК51
Система команд в МК51
Система команд МК51 содержит 111
Типы операндов
и форматы команд
Состав операндов МК51 включает в себя операнды
Типы операндов и форматы команд Состав операндов МК51 включает в себя операнды
Группа команд передачи данных
Группа команд передачи данных

Схема подключения МК к клавиатуре и дисплею с
использованием контроллера, клавиатуры
Схема подключения МК к клавиатуре и дисплею с
использованием контроллера, клавиатуры
Расширители, подключаемые к МК
Расширитель ВР имеет особый статус в системе, который
Расширители, подключаемые к МК
Расширитель ВР имеет особый статус в системе, который

Расширитель содержит 4 4-х разрядных 3-х стабильных двунаправленных порта для
Расширитель содержит 4 4-х разрядных 3-х стабильных двунаправленных порта для
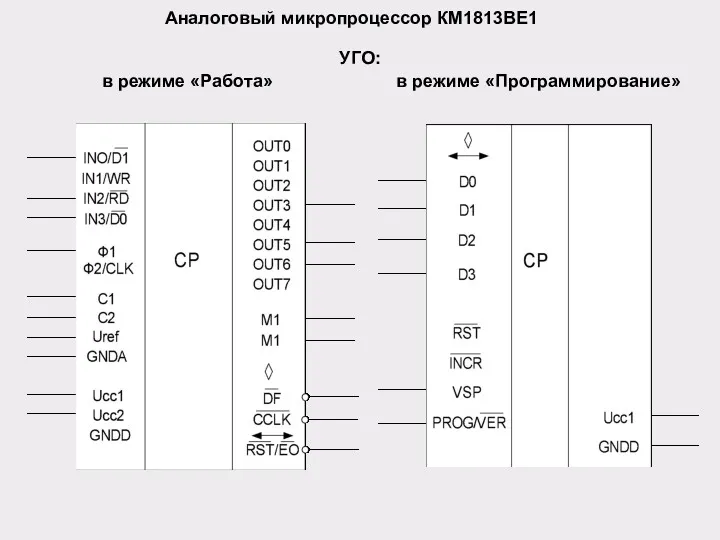
Аналоговый микропроцессор КМ1813ВЕ1
УГО:
в режиме «Работа»
в режиме «Программирование»
Аналоговый микропроцессор КМ1813ВЕ1
УГО:
в режиме «Работа»
в режиме «Программирование»
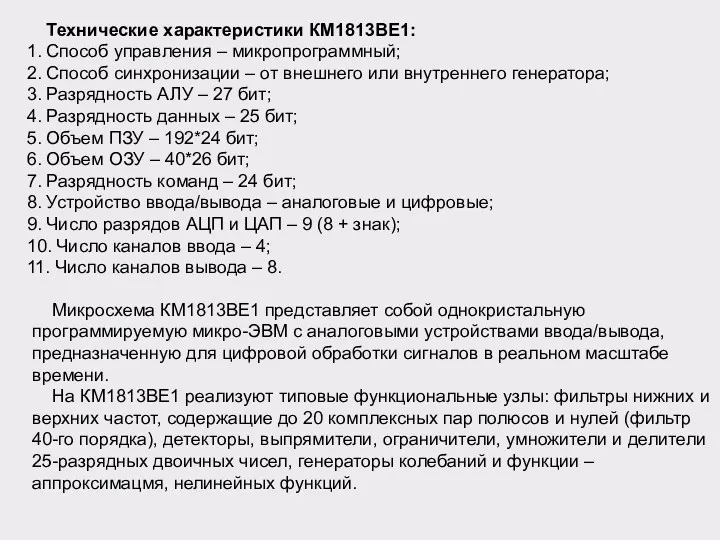
Технические характеристики КМ1813ВЕ1:
1. Способ управления – микропрограммный;
2. Способ синхронизации –
Технические характеристики КМ1813ВЕ1:
1. Способ управления – микропрограммный;
2. Способ синхронизации –

Структура системы самоконтроля
Адаптер
Структура системы самоконтроля
Адаптер
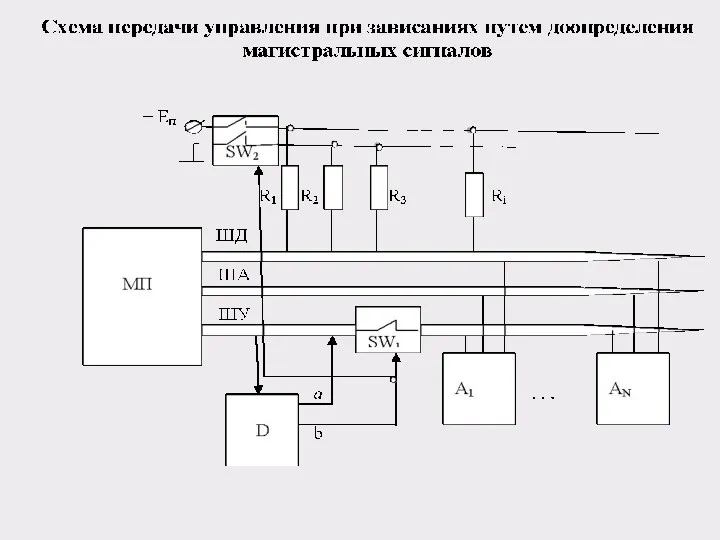
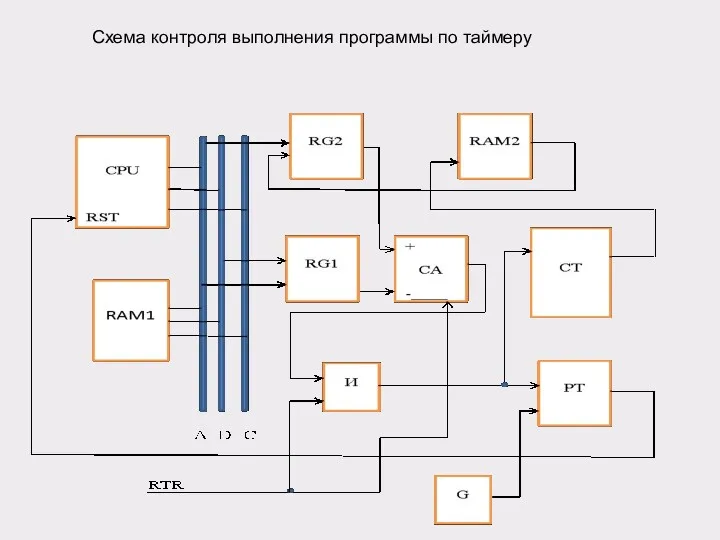
Схема контроля выполнения программы по таймеру
Схема контроля выполнения программы по таймеру
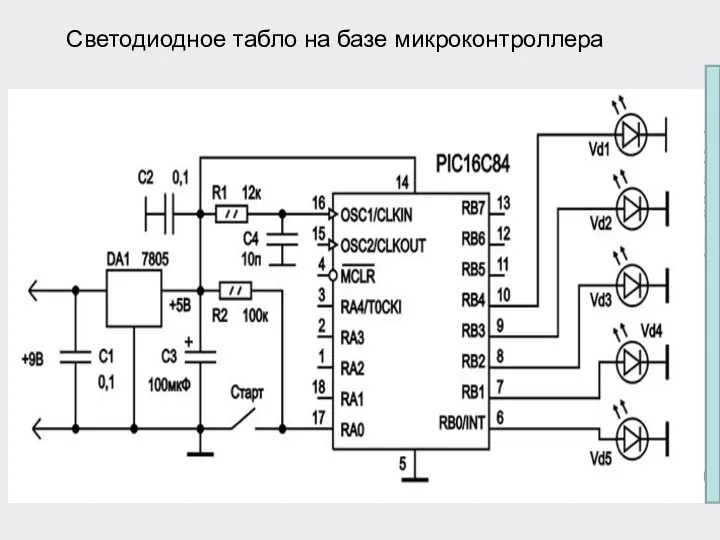
Светодиодное табло на базе микроконтроллера
Светодиодное табло на базе микроконтроллера

Схема светодиодного вращающегося табло
Схема светодиодного вращающегося табло
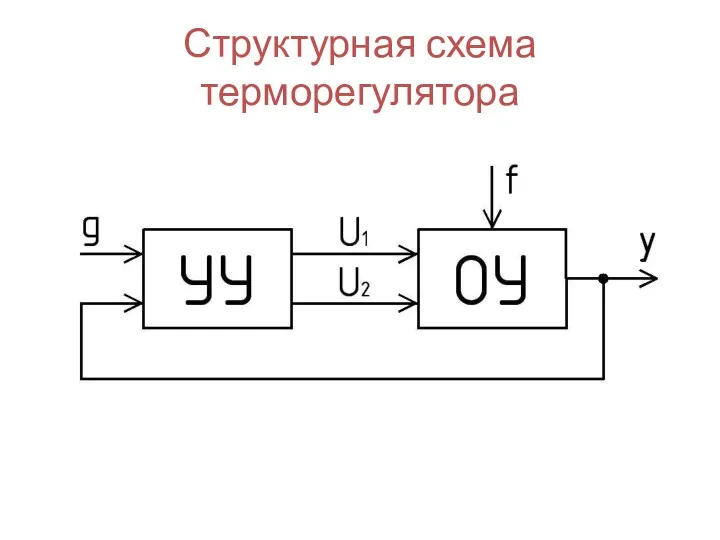
Структурная схема терморегулятора
Структурная схема терморегулятора
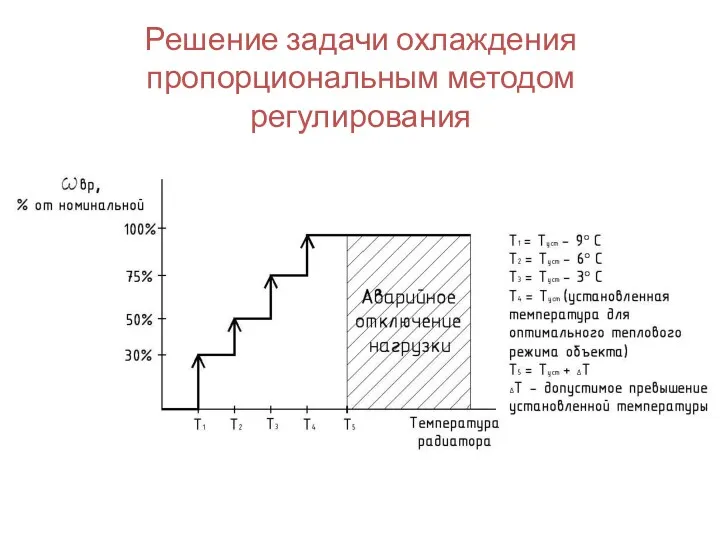
Решение задачи охлаждения пропорциональным методом регулирования
Решение задачи охлаждения пропорциональным методом регулирования
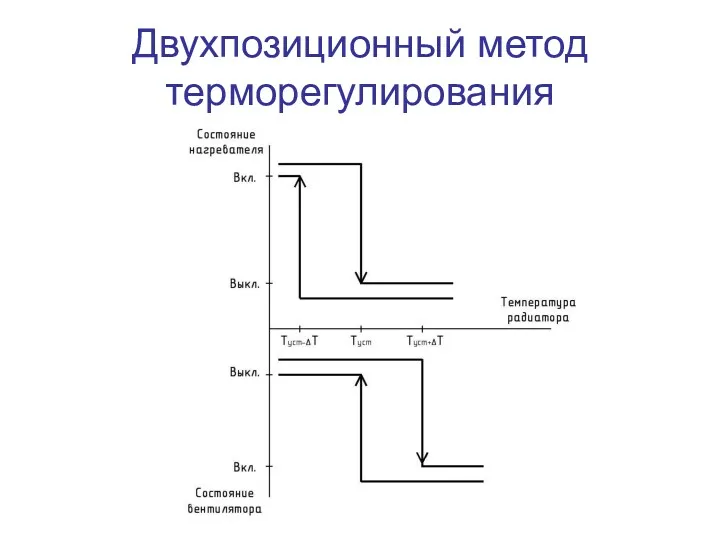
Двухпозиционный метод терморегулирования
Двухпозиционный метод терморегулирования
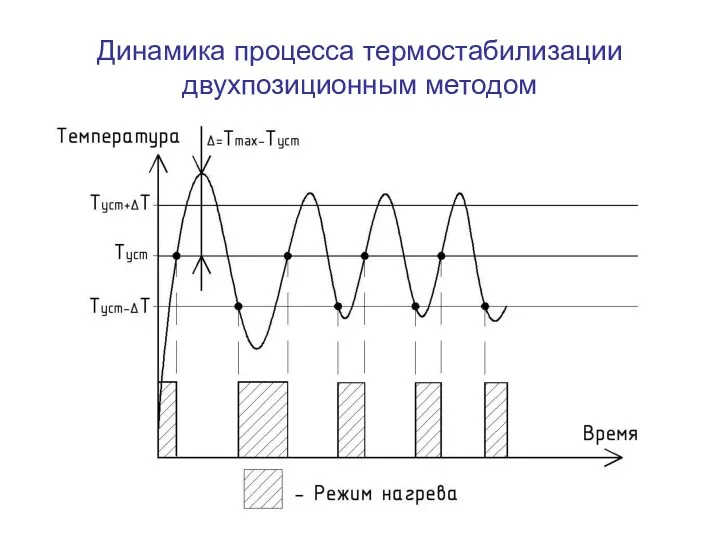
Динамика процесса термостабилизации двухпозиционным методом
Динамика процесса термостабилизации двухпозиционным методом

Структурная схема и уравнение ПИД - регулятора
Структурная схема и уравнение ПИД - регулятора
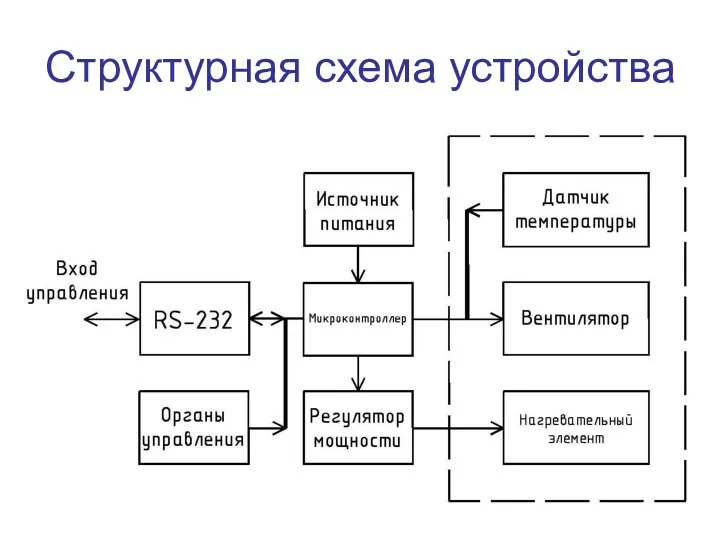
Структурная схема устройства
Структурная схема устройства
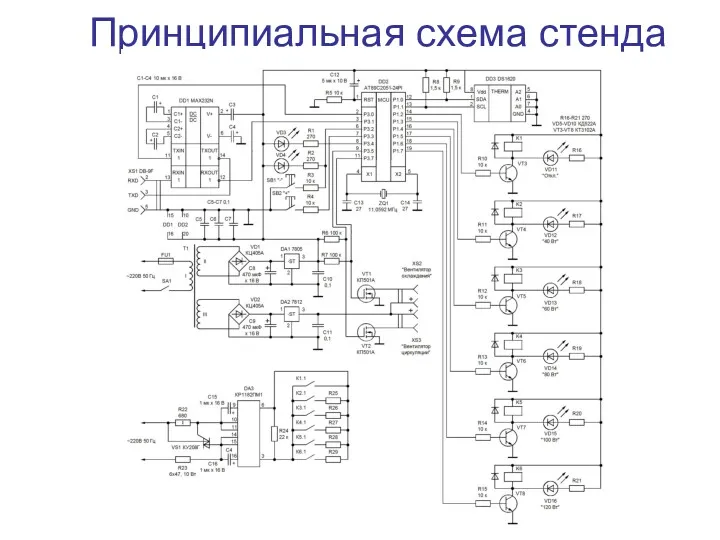
Принципиальная схема стенда
Принципиальная схема стенда
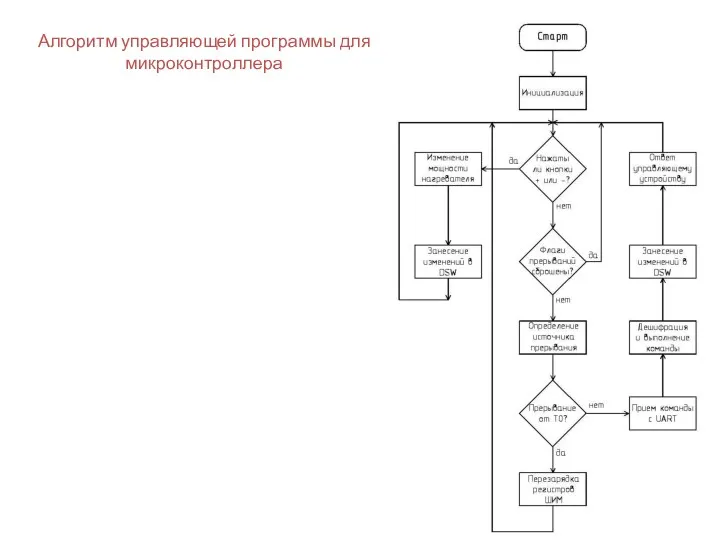
Алгоритм управляющей программы для микроконтроллера
Алгоритм управляющей программы для микроконтроллера
Виды задач, подлежащих решению в ходе практических занятий
охлаждение
термостабилизация
Физический объект
Виды задач, подлежащих решению в ходе практических занятий
охлаждение
термостабилизация
Физический объект
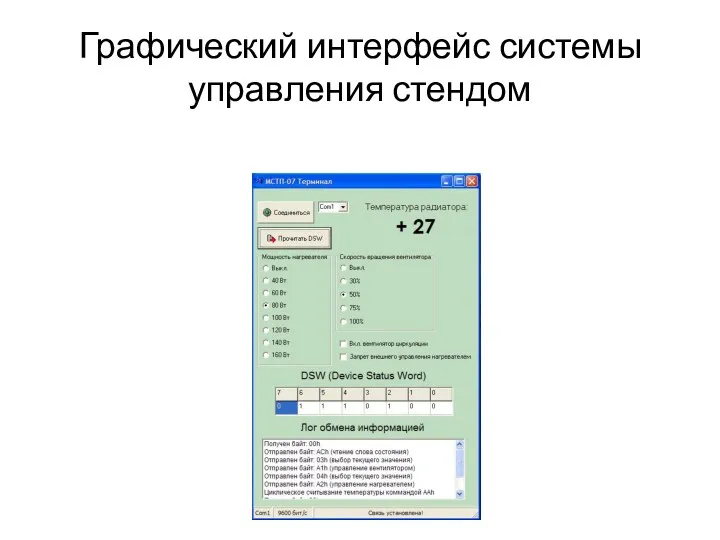
Графический интерфейс системы управления стендом
Графический интерфейс системы управления стендом
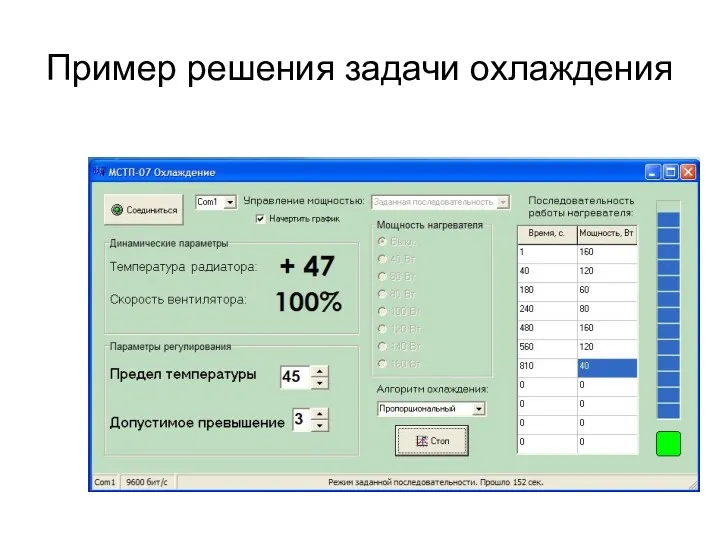
Пример решения задачи охлаждения
Пример решения задачи охлаждения
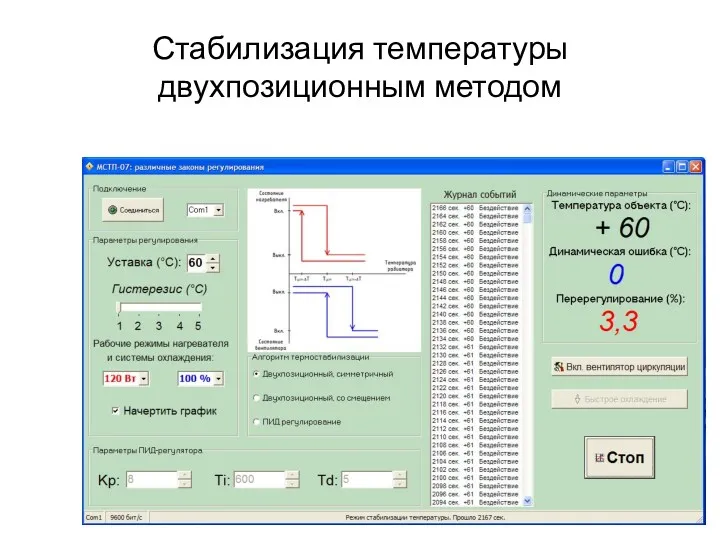
Стабилизация температуры двухпозиционным методом
Стабилизация температуры двухпозиционным методом
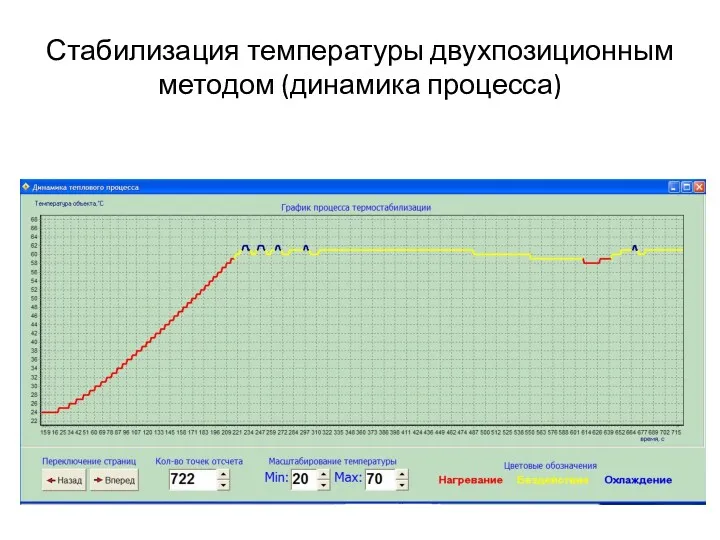
Стабилизация температуры двухпозиционным методом (динамика процесса)
Стабилизация температуры двухпозиционным методом (динамика процесса)
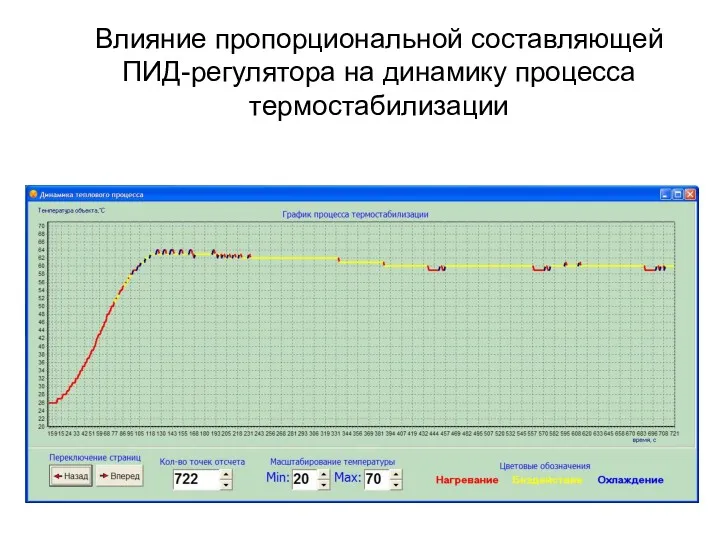
Влияние пропорциональной составляющей ПИД-регулятора на динамику процесса термостабилизации
Влияние пропорциональной составляющей ПИД-регулятора на динамику процесса термостабилизации
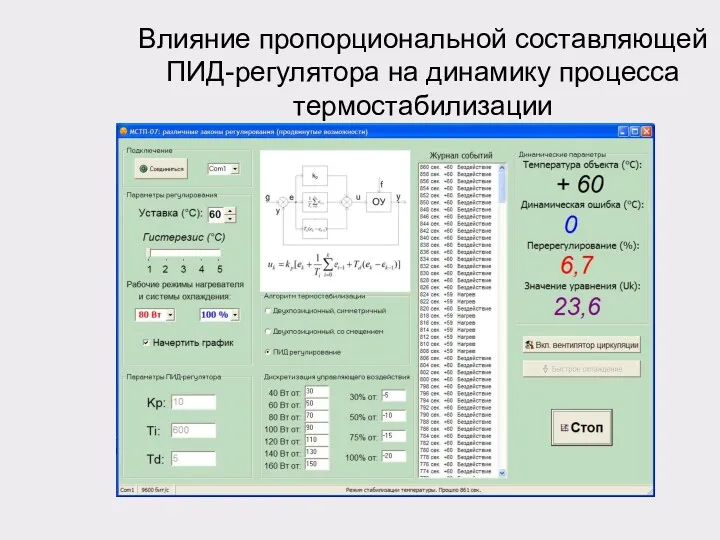
Влияние пропорциональной составляющей ПИД-регулятора на динамику процесса термостабилизации
Влияние пропорциональной составляющей ПИД-регулятора на динамику процесса термостабилизации

Устройство управления, связанное с ПК через COM порт
Устройство управления, связанное с ПК через COM порт

Схема для просмотра ПЗУ микроконтроллера
Схема для просмотра ПЗУ микроконтроллера
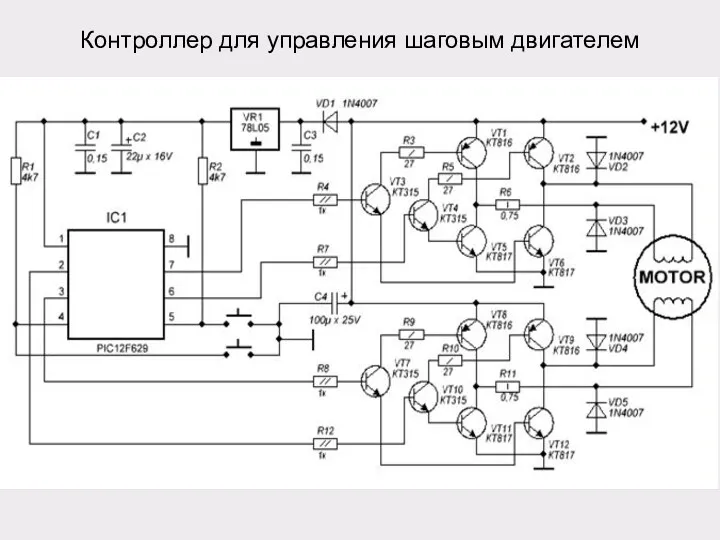
Контроллер для управления шаговым двигателем
Контроллер для управления шаговым двигателем

ИК-приемник системы дистанционного управления на 10 выходов
ИК-приемник системы дистанционного управления на 10 выходов
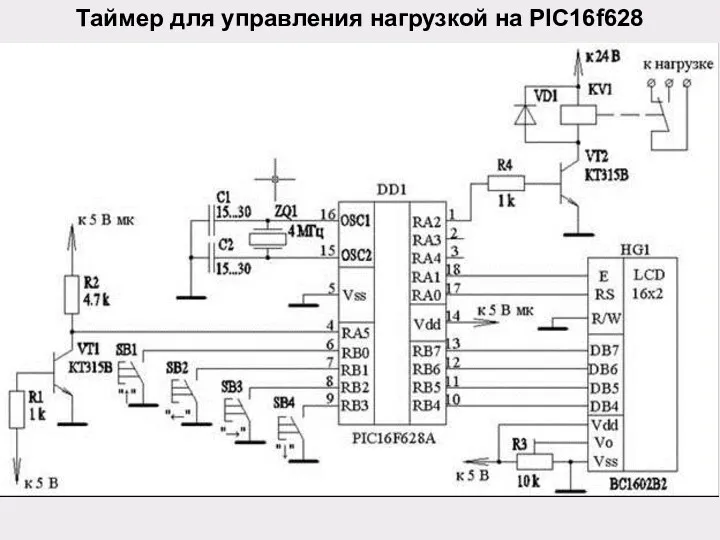
Таймер для управления нагрузкой на PIC16f628
Таймер для управления нагрузкой на PIC16f628

Схема логического анализатора
Схема логического анализатора
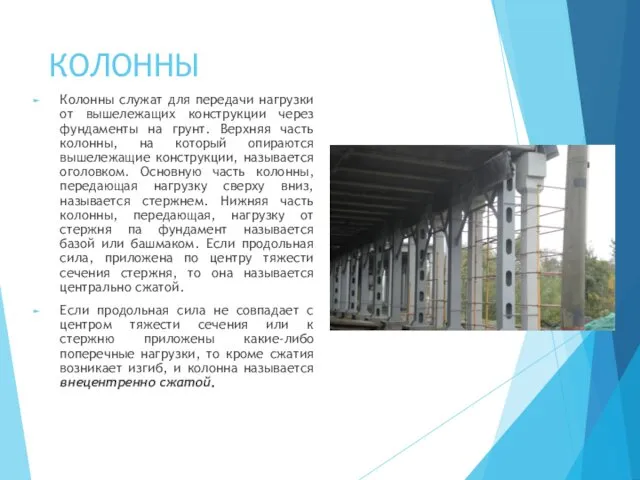 Колонны. Расчет стержня колонны
Колонны. Расчет стержня колонны Сылдыстыг шак
Сылдыстыг шак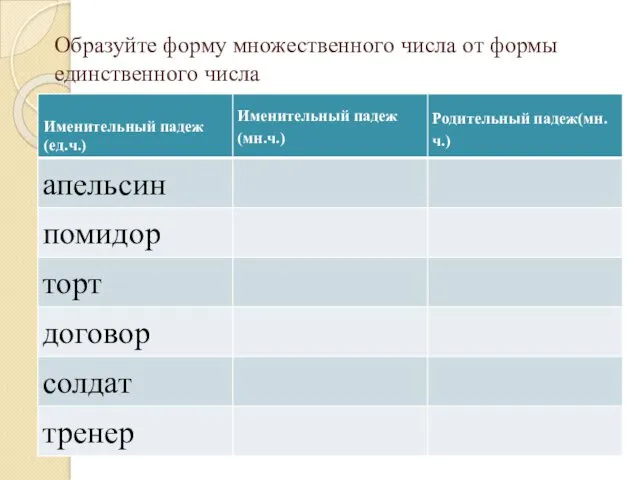 Множественное число имен существительных
Множественное число имен существительных Okean we deňiz akymlary
Okean we deňiz akymlary С 8 марта. Вызов принят
С 8 марта. Вызов принят Общественные центры городов
Общественные центры городов мониторинговая папка учителя начальных классах
мониторинговая папка учителя начальных классах Моделирование систем и процессов. Теория систем массового обслуживания. (Лекция 5)
Моделирование систем и процессов. Теория систем массового обслуживания. (Лекция 5) Владимир Высоцкий
Владимир Высоцкий Технические средства обучения
Технические средства обучения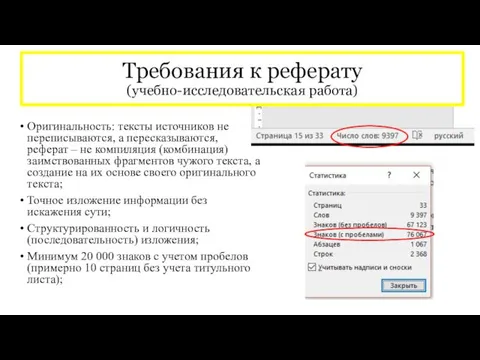 Требования к реферату (учебно-исследовательская работа)
Требования к реферату (учебно-исследовательская работа) Николай 1
Николай 1 Отчет. Выполнение типовых слесарных и слесарно-сборочных работ
Отчет. Выполнение типовых слесарных и слесарно-сборочных работ Отдел голосеменные растения. Тисс ягодный. Кипарис
Отдел голосеменные растения. Тисс ягодный. Кипарис Детские лагеря Южного берега Ялты
Детские лагеря Южного берега Ялты материалы для родительского собрания будущих первоклассников
материалы для родительского собрания будущих первоклассников Презентация Аксай - город Ростовской области
Презентация Аксай - город Ростовской области Государственные и муниципальные заимствования
Государственные и муниципальные заимствования Геология нефти и газа
Геология нефти и газа Автоматизация гидромелиоративных систем. (Тема 11)
Автоматизация гидромелиоративных систем. (Тема 11) Занятие кружка Очумелые ручки 1 класс
Занятие кружка Очумелые ручки 1 класс Первая помощь при отравлениях
Первая помощь при отравлениях Принципы построения и физика работы простейших функциональных узлов
Принципы построения и физика работы простейших функциональных узлов Презентация Ёлочный шар торцевание
Презентация Ёлочный шар торцевание Определения понятия статистика
Определения понятия статистика Документация по личному составу
Документация по личному составу Экологическое право. Предмет экологического права
Экологическое право. Предмет экологического права Сертификаттау жүйелері
Сертификаттау жүйелері